Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации морских, воздушных и наземных объектов.
Известен способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, оси чувствительности которых связаны с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа или датчиков абсолютной угловой скорости [1] или включающий измерение составляющих кажущегося ускорения при помощи акселерометров, измерение сигналов гироскопов или датчиков абсолютной угловой скорости, оси чувствительности которых направлены по осям приборного трехгранника, аналитическое решение задачи ориентации путем моделирования работы инерциальной системы [2], выработку навигационных параметров.
Недостатком известных способов являются ограниченные возможности точностных характеристик.
Целью изобретения является повышение точностных характеристик способа.
Технический эффект достигается тем, что автономно вырабатывают обобщенные координаты системы путем сравнения одноименной информации, вырабатываемой инерциальной системой с линейной коррекцией и, используя автономно выработанные обобщенные координаты, находят оценки погрешностей выходных параметров, в частности, курса объекта.
В качестве примера рассмотрим инерциальную систему с линейной коррекцией с двумя идентичными гироплатформами в карданных подвесах, у которых скоростная девиация α связана со значением горизонтальной составляющей абсолютной угловой скорости  для одной гироплатформы зависимостью
для одной гироплатформы зависимостью  а для другой гироплатформы зависимостью
а для другой гироплатформы зависимостью 
где n1; n2 - параметры системы;
ω0 - частота Шулера.
На фиг.1 представлена структурная схема системы с одной гироплатформой, где приняты следующие обозначения:
1 - гироплатформа в карданном подвесе, наружная ось которого перпендикулярна плоскости основания;
2 - блок управления гироплатформой и выработки навигационных параметров;
3 - блок управления двигателями стабилизации;
4 - трехстепенной гироскоп;
5, 6 - датчики момента гироскопа;
7, 8 - датчики углов гироскопа;
9, 10, 11 - акселерометры;
12, 13, 14 - двигатели стабилизации;
15 - датчик курса объекта;
16 - стабилизированная в плоскости горизонта платформа инерциальной системы, например, с интегральной коррекцией (ИС);
17, 18 - датчики углов карданного подвеса.
Система содержит гироплатформу 1, блок управления гироплатформой и выработки навигационных параметров 2, на гироплатформе 1 расположен трехстепенной гироскоп 4 с датчиками моментов 5, 6 и датчиками углов 7, 8, акселерометры 9, 10 и 11, оси чувствительности которых ортогональны, выходы акселерометров 9, 10, 11 соединены с блоком управления гироплатформой и выработки выходных параметров 2, выходы которого соединены с датчиками момента гироскопа 5, 6, входы блока управления двигателями стабилизации 3 соединены с выходами датчиков углов 7, 8 гироскопа 4, выходы блока управления двигателями стабилизации 3 соединены с соответствующими двигателями стабилизации.
Гироскопическая навигационная система функционирует следующим образом. Гироплатформа 1 с помощью двигателей стабилизации по сигналам рассогласования датчиков углов гироскопа 7, 8 все время удерживается в одной плоскости с кожухом гироскопа 4. Кожух гироскопа 4 вместе с гироплатформой 1 приводится в положение, наклоненное по отношению к плоскости горизонта на заданный угол скоростной девиации, и удерживается в этом положении с помощью моментов, накладываемых через датчики момента гироскопа 5, 6 по сигналам, специально вырабатываемые в блоке управления гироплатформой 2. Двигатель 12 может работать как следящий двигатель по соответствующим сигналам, вырабатываемым самой инерциальной системой с линейной коррекцией или по сигналу инерциальной системы с интегральной коррекцией 16 или по сигналу от внешних курсоуказателей.
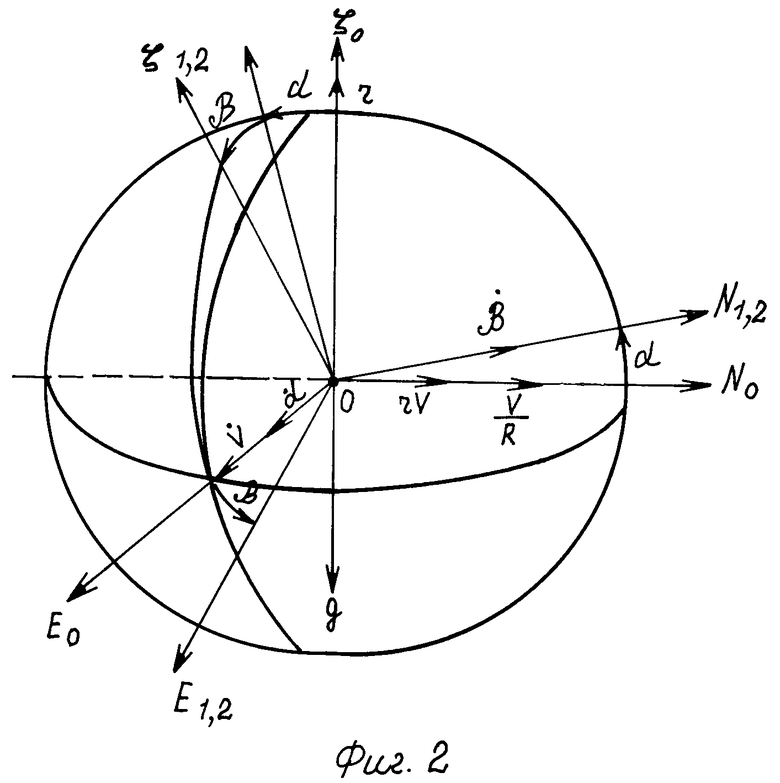
За исходную систему координат примем сопровождающий трехгранник Дарбу E0N0ζ0 (фиг.2). Ось ON0 направлена по компасному меридиану на север. Ось Оζ0 - по вертикали вверх. Тогда проекции абсолютной угловой скорости трехгранника E0N0ζ0 на его оси будут 0;  ; r. К Проекции ускорения вершины трехгранника E0N0ζ0 на его оси суть -
; r. К Проекции ускорения вершины трехгранника E0N0ζ0 на его оси суть - ; -rV; g, где g - ускорение силы тяжести.
; -rV; g, где g - ускорение силы тяжести.
С гироплатформами свяжем правые системы координат E1N1ζ1 и E2N2ζ2.
Системы координат Е1N1ζ1 и Е2N2ζ2 получим из системы координат E0N0ζ0 последовательными поворотами:
1) вокруг оси ОЕ0 на углы α1 и α2 соответственно,
2) вокруг осей ON1 и ON2 на углы β1 и β2 соответственно,
3) дополнительно системы координат E1N1ζ1 и E2N2ζ2 поворачиваются вокруг осей Oζ1 и Oζ2 соответственно на углы ΔK1cosα1 и ΔK2cosα2.
Проекции абсолютной угловой скорости трехгранников E1N1ζ1 и E2N2ζ2 на их оси будут:




где Δp1; Δр2; Δq1; Δq2 - дрейфы гироскопов.
Проекции кажущегося ускорения вершины трехгранников E1N1ζ1 и Е2N2ζ2 на их оси будут:
WE1=- -(rVsinα1-gcosα1)β1+ΔWE1
-(rVsinα1-gcosα1)β1+ΔWE1
WN1=-(rVcosα1-gsinα1)+ΔWN1
Wζ1=-gcosα1+rVsinα1+ΔWζ1

WN2=-(rVcosα2-gsinα2)+ΔWN2
Wζ2=-gcosα2+rVsinα2+ΔWζ2
где ΔWE1; ΔWN1; ΔWζ1; ΔWE2; ΔWN2; ΔWζ2 - погрешности соответствующих акселерометров. Полагаем n1=-n2=n, тогда:
 и
и  .
.
Выражения для управляющих сигналов гироскопов 1 и 2 определим следующие:
где

 ;
; 
Тогда уравнения движения (функционирования) двух гиромаятников будут:
QE1= ΩE1упр; - ΩE2= ΩЕ2упр;
ΩN1= ΩN1упр; - ΩN2= ΩN2упр.
Введем обозначения



где  ;
;  ;
;  ;
;  - обобщенные координаты системы;
- обобщенные координаты системы;
 характеризует погрешность выработки
характеризует погрешность выработки  ;
;

 характеризует погрешность выработки гироплатформами плоскости горизонта;
характеризует погрешность выработки гироплатформами плоскости горизонта;
 характеризует ошибку выработки компасного курса
характеризует ошибку выработки компасного курса  для любого заданного параметра "n",
для любого заданного параметра "n",
 - наблюдаемая обобщенная координата.
- наблюдаемая обобщенная координата.
В бесплатформенном варианте ИНС при аналитическом решении задачи ориентации замер (β2-β1), также как и замер (α2-α1), обеспечивается путем оценки отклонения приборной вертикали каждой модели гироплатформы инерциальной системы с линейной коррекцией от направления геоцентрической вертикали инерциальной системы с интегральной коррекцией 16 в виде углов β и α.
Можно показать, что по оценкам углов β2-βис и β1-βис, а также по показаниям акселерометров WE1, WE2 и WEuc возможно обеспечить замер наблюдаемых обобщенных координат  и βис, где βис - ошибка стабилизации гирогоризонта инерциальной системы с интегральной коррекцией, WЕис - показание соответствующего акселерометра инерциальной системы с интегральной коррекцией.
и βис, где βис - ошибка стабилизации гирогоризонта инерциальной системы с интегральной коррекцией, WЕис - показание соответствующего акселерометра инерциальной системы с интегральной коррекцией.
Источники информации
1. В.А.Беленький - Патент РФ №2000544.
2. А.В.Репников, Г.П.Сачков, А.И.Черноморский - «Гироскопические системы».
Изобретение относится к обеспечению навигацией движущихся объектов. Целью изобретения является повышение точностных характеристик вырабатываемых навигационных параметров. Технический эффект достигается тем, что автономно вырабатывают обобщенные координаты системы путем сравнения одноименной информации, вырабатываемой инерциальной системой с линейной коррекцией, и, используя автономно выработанные обобщенные координаты, находят оценки погрешностей выходных параметров, в частности, курса объекта. 2 ил.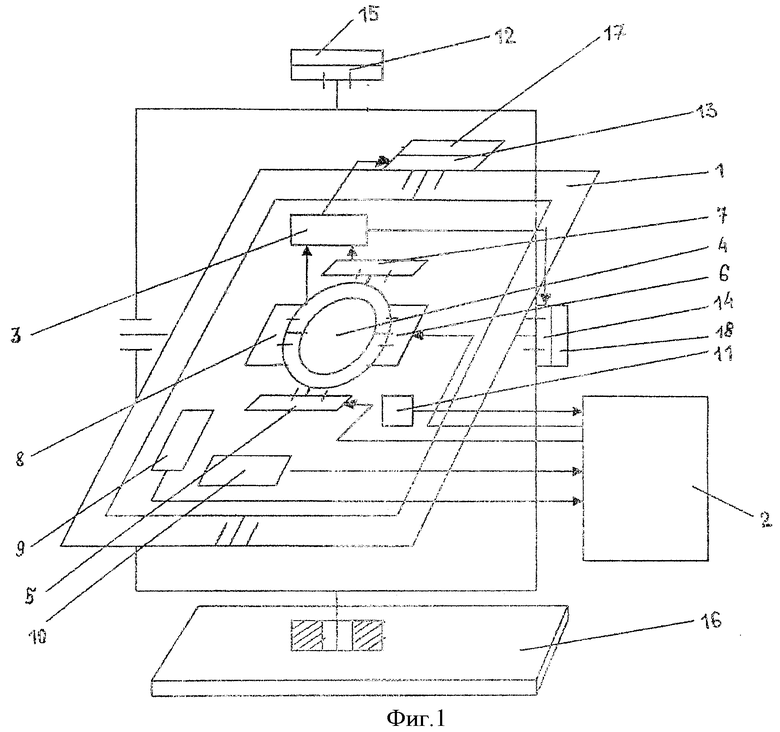
Способ выработки навигационных параметров, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, оси чувствительности которых связаны с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа или датчиков абсолютной угловой скорости, или включающий измерение составляющих кажущегося ускорения при помощи акселерометров, измерение сигналов гироскопов или датчиков абсолютной угловой скорости, оси чувствительности которых направлены по осям приборного трехгранника, аналитическое решение задачи ориентации путем моделирования работы инерциальной системы, выработку навигационных параметров, отличающийся тем, что сравнивают одноименные сигналы, вырабатываемые инерциальной системой с линейной коррекцией с двумя идентичными гироплатформами или сравнивают одноименные сигналы, вырабатываемые инерциальной системой с линейной коррекцией и другой инерциальной системой, например, инерциальной системой с интегральной коррекцией, на основании указанных сравнений автономно определяют обобщенные координаты системы, используя которые находят оценки погрешностей выходных параметров, в частности курса объекта.
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2005 |
|
RU2309384C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1996 |
|
RU2100821C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА (ВАРИАНТЫ) | 2005 |
|
RU2272995C1 |

