Изобретение относится к навигации и может быть использовано для морских, воздушных и наземных объектов.
Известна гироскопическая навигационная система для подвижных объектов [1], содержащая блок управления и выработки выходных параметров, гироплатформу, на которой установлены трехстепенной гироскоп с датчиками момента и датчиками угла, ось кинетического момента которого перпендикулярна плоскости гироплатформы, или два двухстепенных гироскопа, выходы датчиков углов связаны с входами блока управления следящими двигателями, а входы датчиков момента - с первым и вторым выходами блока управления и выработки выходных параметров, первый и второй акселерометры, оси чувствительности которых ортогональны между собой и параллельны плоскости гироплатформы, выходы которых соединены с первым и вторым входами блока управления и выработки выходных параметров, измеритель составляющей абсолютной угловой скорости приборного трехгранника, перпендикулярной плоскости гироплатформы, выход которого связан с третьим входом блока управления и выработки выходных параметров, при этом гироплатформа связана с объектом двухосным карданным подвесом, который снабжен по осям подвеса следящими двигателями, входы которых соединены с выходами соответствующих блоков управления следящими двигателями, выходы датчиков углов качек соединены с четвертым и пятым входами блока управления и выработки выходных параметров.
Недостатком этого устройства является трудность получения высоких точностей выработки координат места и курса объекта. Эта точность лимитируется, в том числе техническими характеристиками измерителя составляющей абсолютной угловой скорости, а именно: либо его высокой стоимостью, либо большими габаритами, либо низкими точностями и техническими характеристиками гироскопа.
Так для получения высоких точностей выработки курса объекта необходимо повысить точность элементной базы, определяющей точность выработки горизонтальных составляющих абсолютной угловой скорости приборного трехгранника. Для получения высоких точностей выработки координат места необходимо повысить точности элементной базы, определяющей точность выработки трех составляющих абсолютной угловой скорости приборного трехгранника. В настоящем изобретении предлагается повысить точность выработки данных путем создания механизмов, обеспечивающих выделение постоянных и сравнительно медленно меняющихся погрешностей и их оценку и улучшение динамических свойств системы.
Целью изобретения является повышение точности изделия при практическом сохранении массогабаритных характеристик.
Поставленная цель достигается следующим образом. Дополнительно введены: акселерометр, ось чувствительности которого перпендикулярна плоскости гироплатформы, выход которого соединен с шестым входом блока управления и выработки выходных параметров, блок колебаний гироплатформы относительно осей, лежащих в плоскости гироплатформы, при этом вход блока колебаний соединен с третьим выходом блока управления и выработки выходных параметров, а выходы блока колебаний соединены с сумматорами первого и второго выходов блока управления и выработки выходных параметров и блок поворота чувствительных элементов, в частности трехстепенного гироскопа, вокруг оси, перпендикулярной плоскости гироплатформы с управляемым двигателем и датчиком угла поворота, выход которого соединен с седьмым входом блока управления и выработки выходных параметров, а в качестве опоры выработки замера для оценки погрешностей введен блок приема внешней информации, выход которого соединен с восьмым входом блока управления и выработки выходных параметров или в качестве опоры выработки замера для взаимной оценки погрешностей введены одна или несколько гироплатформ, у которых блоки колебаний гироплатформ и блоки поворота чувствительных элементов создают движения с разными частотными параметрами.
На чертеже представлена функциональная схема гироскопической навигационной системы, где приняты следующие обозначения: 1 - блок управления и выработки выходных параметров; 2 - гироплатформа; 3 - трехстепенной гироскоп; 4 и 5 - датчики момента гироскопа; 6 и 7 - датчики угла гироскопа; 8 - измеритель составляющей абсолютной угловой скорости; 9 - 11 - акселерометры; 12 и 13 - следящие двигатели; 14 и 15 - датчики углов качек; 16 и 17 - блоки управления следящими двигателями; 18 - блок поворота чувствительных элементов; 19 - двигатель блока поворота; 20 - датчик угла блока поворота; 21 - блок колебаний гпроплатформы; 22 - блок приема внешней информации.
В качестве измерителя составляющей абсолютной угловой скорости может быть использован прибор, работающий на различных физических принципах, например: волоконно-оптический, лазерный, твердотельный, одноостный гиростабилизатор.
Гироскопическая навигационная система содержит блок управления и выработки выходных параметров, выполняющий, в том числе, задачи фильтра 1, гироплатформу 2, на гироплатформе расположен трехстепенной гироскоп 3 с датчиками момента 4 и 5 и датчиками угла 6 и 7, измеритель составляющей угловой скорости 8, акселерометры 9 - 11, блок поворота чувствительных элементов 18 с управляемым двигателем 19 и датчиком угла 20, по осям карданного подвеса установлены следящие двигатели 12 и 13 с датчиками угла качек 14 и 15, следящие двигатели управляются блоками управления следящими двигателями 16 и 17, блок колебаний 21 и блок приема внешней информации 22.
Гироскопическая навигационная система функционирует следующим образом.
Гироплатформа 2 с помощью следящих двигателей 12 и 13 по сигналам рассогласования датчиков угла 6 и 7 гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. По сигналам акселерометров 9 - 11 и измерителя составляющей абсолютной угловой скорости гироплатформа может удерживаться в плоскости горизонта или колебаться относительно нее по сигналам блока колебания 21 путем создания необходимых моментов на датчики момента 4 и 5 гироскопа 3. Блок поворота чувствительных элементов модулирует постоянные и медленно меняющиеся дрейфы гироскопа 3. Сравнивая в блоке 1 одноименные параметры, выработанные системой и используемые от источника внешней информации, можно выделить и оценить модулированные погрешности системы. Выделение и оценка модулированных погрешностей, в частности, может быть осуществлена с помощью демпфирующих гироплатформу сигналов, используя в качестве опоры составляющие путевой скорости от лага. В случае использования в качестве опоры сигналов дополнительно одной или более гироплатформ, в качестве замера может быть принята величина типа
ε1= Ω
где Ω
Блок колебаний осуществляет колебания гироплатформы по двум осям с помощью датчиков момента 4 и 5 по заданной программе на заданных разных частотах. Погрешности чувствительных элементов будут проявлять себя на этих заданных разных частотах модуляции и оцениваться по такому же принципу, как и при оценке действия блока поворота.
В случае использования в качестве опоры дополнительно введенных гироплатформ добавится еще замер типа ε3= Ω
Координаты места ϕ и λ , скорость объекта V и курс объекта К автономно определяются, как обычно, по кинематическим уравнениям. Курс объекта и широта места дополнительно вырабатываются по горизонтальным составляющим приборного трехгранника с использованием информации от лага. Углы качек вырабатываются в блоке управления и выработки выходных параметров по сигналам датчиков углов качек с учетом заданных углов колебаний платформы θ и ψ .
Изложенные механизмы выделения и оценки погрешностей применимы полностью и к гироплатформе с трехосным карданным подвесом.
По существу в данной заявке предлагается два самостоятельных решения проблемы повышения точности выработки навигационных параметров.
Одно - с помощью колебаний чувствительных элементов вокруг оси, перпендикулярно плоскости гироплатформы; второе - с помощью колебаний гироплатформы вокруг осей, лежащих в плоскости гироплатформы.
В то же время совместное их использование позволяет увеличить возможности выделения и оценки погрешностей системы.
Так первые два решения, в отдельности каждое, позволяют оценить постоянные и медленно меняющиеся погрешности системы.
Совместное их использование позволяет оценить еще, например, и возникающие погрешности с частотой модуляции.
При этом режим выделения и оценки погрешностей может быть различным: например, одна из двух гироплатформ колеблется, а вторая находится в горизонте, или если одна платформа колеблется, например, вокруг оси OX, вокруг оси OY, она не колеблется, вторая же гироплатформа колеблется вокруг оси OY, а вокруг оси OX не колеблется. Блок поворота в одной системе может поворачиваться, а в другой системе оставаться на месте.
Режимы поворотов и колебаний могут не совпадать по времени, могут чередоваться.
Алгоритм управления гироплатформой, находящейся в плоскости горизонта с блоком поворота трехстепенного гироскопа, может быть реализован в различных системах координат, в частности можно записать:
∫(ax-ΩzΩx)dt = Ωy; ∫(ay-ΩzΩy)dt = -Ωx
где Ωx и Ωy - горизонтальные составляющие абсолютной угловой скорости корабельного трехгранника Дарбу;
Ωz - вертикальная составляющая этого трехгранника;
aх и ay - показания акселерометров в корабельной системе координат.

где  - сигналы управления гироскопом 3.
- сигналы управления гироскопом 3.
Тогда проекции дрейфов гироскопа 3 на корабельную систему координат основной гироплатформы ΔpI и ΔqI будут:
где Δp1 и Δq1 - дрейфы гироскопа,
χ = χosinωt
ω - частота модуляции дрейфов;
χo - амплитуда поворота.
С корабельным трехгранником Дарбу свяжем правую систему координат XYt. Ось OZ вертикальна. С гироплатформой свяжем систему координат X1Y1Z1. Система координат X1Y1Z1 образуется из XYZ поворотом на угол θ вокруг оси OX - оси бортовой качки и на угол ψ вокруг оси OY1.
Направляющие косинусы между системами координат Х1Y1Z1 и XYZ будут:
Тогда
где  - показания акселерометров;
- показания акселерометров; - показания измерителя угловой скорости приборного трехгранника вокруг оси, перпендикулярной плоскости гироплатформы;
- показания измерителя угловой скорости приборного трехгранника вокруг оси, перпендикулярной плоскости гироплатформы; - управляющие сигналы трехстепенного гироскопа.
- управляющие сигналы трехстепенного гироскопа.
Углы θ и ψ - заданы. Так, например,
θ = θosinω1t; ψ = ψosinω2t
где θo,ψo,ω1 и ω2 - параметры модуляции колебаний.
Погрешности вырабатываемых параметров будут модулированы на частотах ω1 и ω2 . Сравнивая одноименные параметры системы и внешней информации, оцениваются динамические и инструментальные погрешности системы.
Дополнительным вводом одной или более гироплатформ взаимной оценки динамических и инструментальных погрешностей системы может быть осуществлена по замерам
где i и j - номера гироплатформ;
Ω
Предлагаемые в заявке механизмы повышения точности гироскопической навигационной системы путем поворота чувствительных элементов и колебания гироплатформ применимы полностью и для гироплатформ, у которых вместо трехстепенного гироскопа могут быть использованы другого типа измерители составляющих абсолютной угловой скорости приборного трехгранника, в том числе и неуправляемые, как, например, оптиковолоконные, лазерные, твердотельные и другие.
Удержание гироплатформы в плоскости горизонта и колебания гироплатформы будут обеспечивать следящие двигатели по сигналам вычислителя, решающего навигационные задачи и задачи управления гироплатформой по сигналам ее трех акселерометров и трех измерителей составляющих абсолютной угловой скорости приборного трехгранника, установленные на гироплатформе.
Предложенные механизмы повышения точности путем поворотов чувствительных элементов также дадут аналогичный эффект и в бесплатформенной гироскопической навигационной системе, если, например, измерители составляющих абсолютной угловой скорости поместить в три блока поворота с двигателем и датчиком угла поворота каждый, разместить эти блоки на объекте так, чтобы в исходном положении каждая ось чувствительности была ориентирована по осям трехгранника, связанного с объектом, и поворачивать оси чувствительности измерителей с разными частотными параметрами. В качестве опоры для оценки погрешностей использовать также либо внешнюю информацию, либо дополнительно введенные блоки поворота с чувствительными элементами, колеблющиеся с другими частотными параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2147731C1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2001 |
|
RU2197716C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2005 |
|
RU2309384C2 |
Система может быть использована для морских, воздушных и наземных объектов. Система содержит блок управления и выработки выходных параметров, гироплатформу с трехстепенным гироскопом и двумя акселерометрами. В систему дополнительно вводятся блоки поворота чувствительных элементов и блок колебаний гироплатформы, которые обеспечивают модуляцию на разных частотах погрешностей системы, что приводит к повышению ее точности. 3 с.п. ф-лы, 1 ил.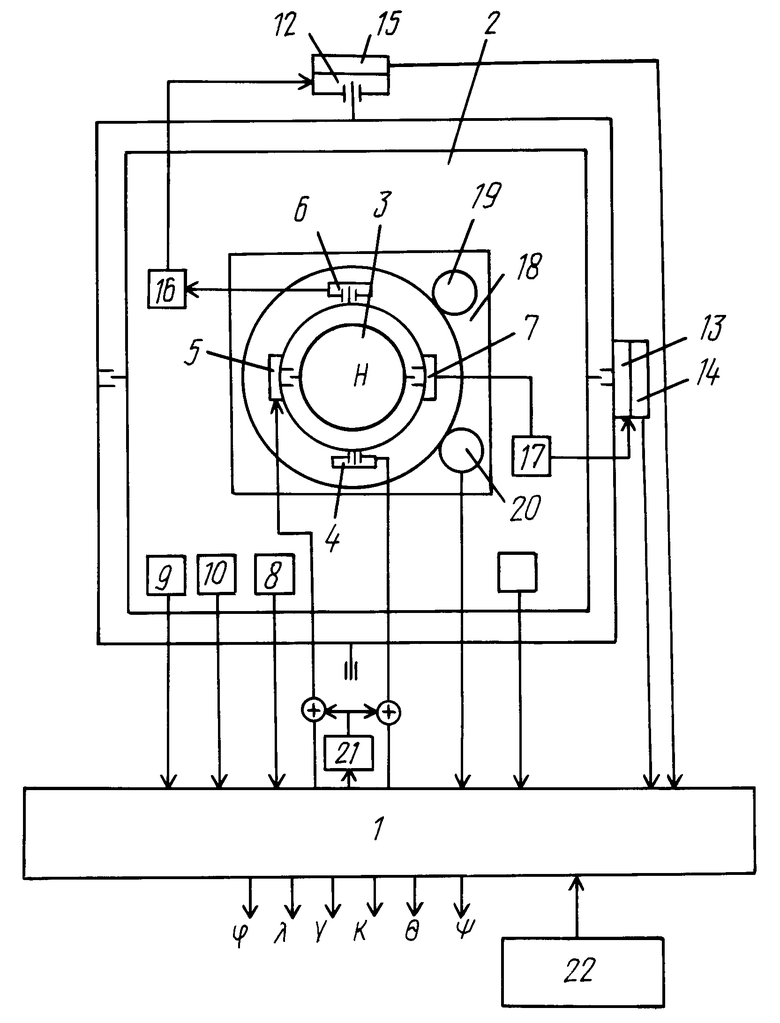
| RU, 2000544 C, 25.04.94 | |||
| Пельнор Д.С | |||
| Гироскопические системы | |||
| - М.: Высш ая школа, 1986, с.337-440 | |||
| Бромберг П.В | |||
| Теория инерционных систем навигац ии | |||
| - М.: Наука, 1979, с.185-188. |
