Изобретение относится к измерительной технике и может быть использовано для измерения параметров магнитного поля (МП) и магнитных характеристик веществ с помощью интегрального датчика МП с частотным выходом.
На фиг.1 изображена функциональная схема устройства для измерения индукции МП; на фиг.2, 3 изображены зависимости чувствительности S (фиг.2) и выходной частоты Fout в отсутствие МП (фиг.3) от тока питания Ibb; на фиг.4 временные диаграммы сигналов на выводах блока управления (БУ); на фиг.5а, б примеры выполнения БУ и отключаемого источника тока.
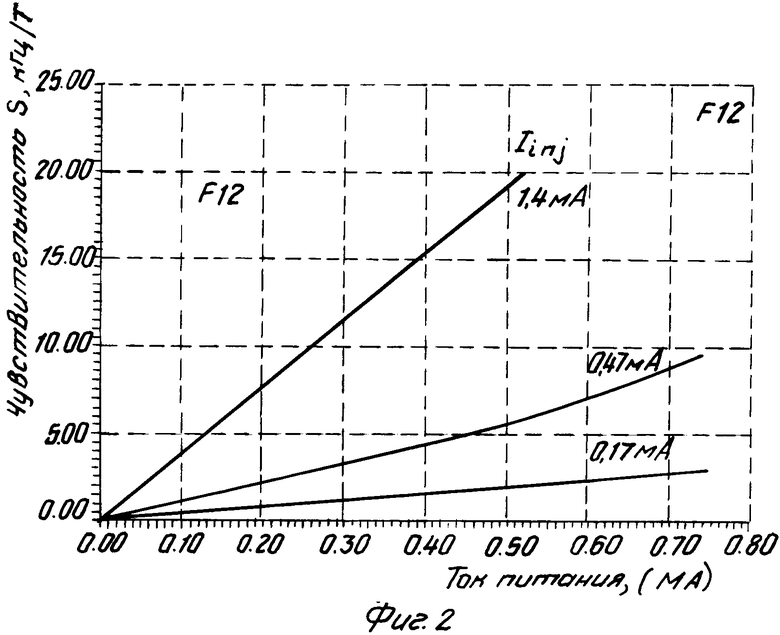
Способ измерения индукции МП реализован на интегральном датчике МП с частотным выходом. Датчик имеет вход (или два входа) инжекции, на который подается ток инжекции Iinj, управляющий начальной частотой сигнала Fo (в отсутствие МП) на выходах датчика, и вход питания, на который подается ток питания Ibb. Экспериментально установлено, что при постоянном токе инжекции чувствительность S
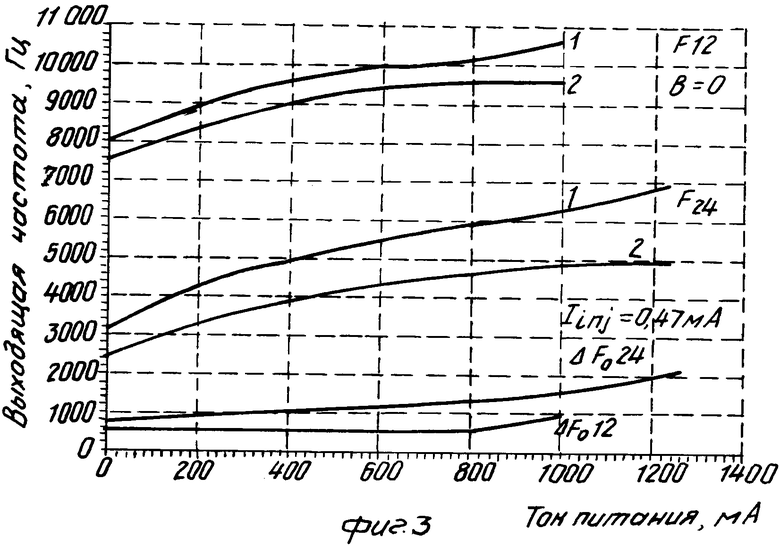
S [ΔF(B) ΔFo] /B, где ΔF(B) F1(B) F2(B), разность частот на выходах датчика (F1 и F2 при воздействии МП с индукцией В; ΔFoΔF(B) (при В 0 остаточный сигнал датчика) практически линейно зависит от величины тока питания (см. фиг.2). Это наблюдается для различных значений тока инжекции. При нулевом значении тока Ibb питания чувствительность практически равна нулю. При отсутствии МП (В 0) и изменении тока Ibb от нуля до некоторого значения (например 0,7-0,8 мА, оптимального рабочего тока датчика), частоты на выходах 1 и 2 датчиков возрастают синхронно, как это показано на фиг.3 для двух различных типов датчиков F12 и F24, а разность частот ΔFo для датчика типа F12 (ΔFo12) практически постоянная при изменении тока от 0 до 0,8 мА, а для датчика F24 (ΔFo24) относительное изменение [ ΔFo(Ibb) ΔFo(0)]/ ΔFo(Ibb) при токе Ibb составляет около 30%
В основе способа лежит наличие сильной зависимости чувствительности датчика и слабой зависимости остаточного сигнала ΔFo от величины тока питания.
При измерении индукции МП проводятся следующие операции: подается постоянный ток инжекции на вход инжекции датчика; подается нулевой потенциал на вход общей шины датчика; на вход питания датчика подается переменный сигнал прямоугольной формы типа "меандр" с частотой, не менее чем на порядок меньшей минимальной частоты на выходах датчика; снимаются сигналы с двух выходов датчика; измеряются частоты снимаемых сигналов раздельно в момент высокого уровня сигнала на входе питания датчика и в момент его низкого уровня; при обработке результатов разности частот выходных сигналов датчика, измеряемых в момент высокого уровня сигнала на входе питания датчика и в момент его низкого уровня, вычитаются друг из друга, а полученная величина пропорциональна величине индукции МП.
В момент высокого уровня сигнала на входе питания датчика Ibb и низкого уровня Ibb0 разности частот на выходах датчика соответственно равны:
ΔF(IbbO) ΔFo(IbbO) + S(IbbO) ˙B;
ΔF(Ibb1) ΔFo(Ibb1) + S(Ibb1) ˙B
При вычитании значения ΔF получим:
ΔFp ΔF(IbbO) ΔF(Ibb1) Δ Fop +
+ Sp˙B, где ΔFop Δ Fo(IbbO) -Δ Fo(Ibb1); Sp= S(IbbO) S(Ibb1).
Для частного случая нулевого значения низкого уровня тока питания (Ibb1 0) с учетом того, что величины S(O) 0 (из фиг.2) и ΔFo(IbbO) ΔFo(Ibb1) для датчиков типа F12 и ΔFo(IbbO) 1,3 ΔF(Ibb1) для датчика типа F24 получим ΔFop 0 для датчиков F12 и Δ Fop0,3 ΔFo(Ibb1) для датчиков F24, при этом Sp S(Ibb1).
Таким образом, при выполнении операций способа при сохранении величины чувствительности S(Ibb) величина аддитивной погрешности снижается практически до нуля для одного типа датчика и более чем в 3 раза для другого. При этом почти в 2 раза уменьшается потребляемая датчиком мощность, определяемая в основном током питания. Соотношение минимального значения частот на выходах датчика и частоты изменения тока питания определяет точность измерения и должно быть не менее 10. В этом случае при определении частоты за время наличия постоянного уровня тока питания погрешность будет не более 10% (потеря 1 импульса из 10 минимально возможных).
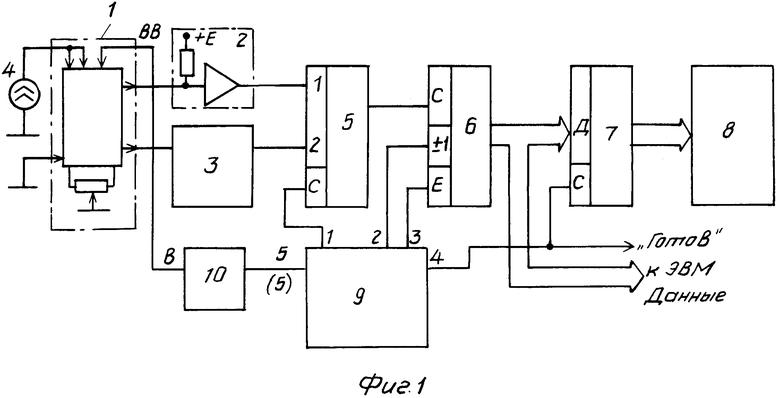
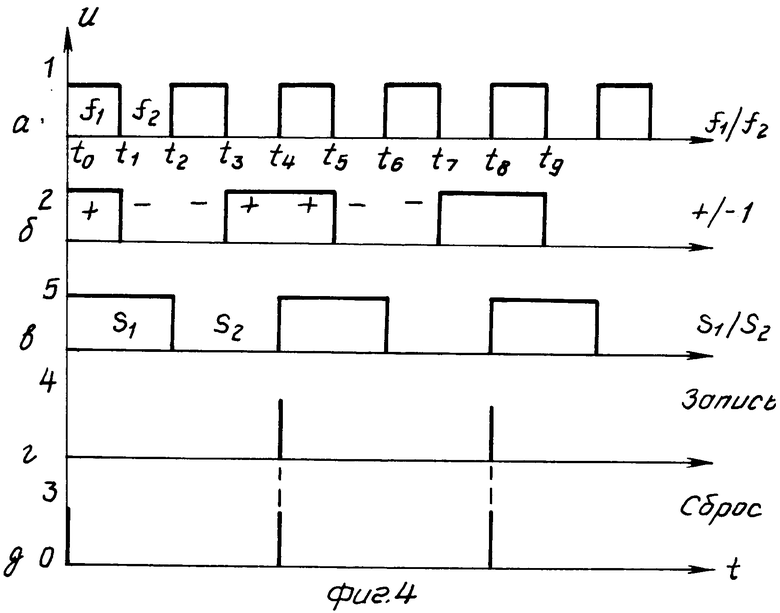
Устройство для осуществления способа (фиг.1) состоит из интегрального датчика 1 с МП с частотным выходом, двух одинаковых буферных блоков 2 и 3, источника 4 тока инжекции, мультиплексора 5, реверсивного счетчика 6, параллельного регистра 7, индикатора 8, блока 9 управления (БУ) и отключаемого источника 10 тока. Вход (входы) инжекции датчика 1 соединен с источником 10, вход общей шины подключен к общей шине, а выходы через буферные блоки 2 и 3 к входам мультиплексора 5, выход которого соединен со счетным входом счетчика 6. Выходы счетчика 6 (обычно с двоично-десятичной формой цифрового сигнала) соединяются с входами регистра 7, выходы которого подключены к индикатору 8. В случае использования семисегментного индикатора (например, АЛС-324) используется регистр, совмещенный с дешифратором (например, на стандартных ИМС типа К176ИД2, К176ИД3). К управляющему входу мультиплексора 5, входу изменения направления счета счетчика 6, входу переустановки данных счетчика 6 и входу разрешения записи данных регистра 7 подключены соответственно первый, второй, третий и четвертый выходы БУ 9, пятый выход которого соединен с входом управления источника 10, выход которого подключен к входу питания датчика 1. Выходы счетчика 6 или регистра 7 могут быть подключены к входному порту ЭВМ, при этом сигналом готовности данных для шины управления ЭВМ служит сигнал с четвертого выхода БУ 9. БУ 9 строится по стандартной методике. Временные диаграммы сигналов на первом, втором, третьем, четвертом и пятом выходах БУ представлены соответственно на диаграммах а)-д) фиг.4 (где f1 и f2 частоты измеряемых в данный момент каналов; (+) и (-) направление счета; S1 и S2 значения установленной в данный момент чувствительности).
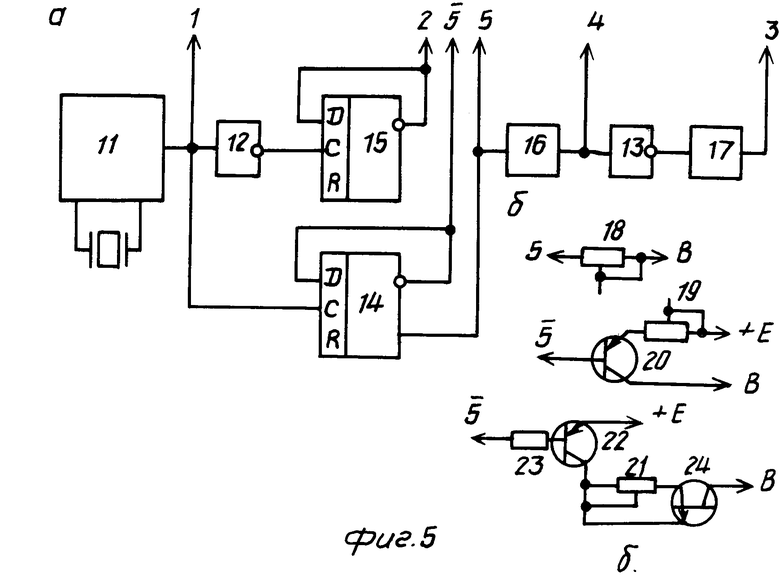
Пример выполнения БУ представлен на фиг.5а. БУ состоит из образцового генератора 11, двух инверторов 12 и 13, двух триггеров 14 и 15 и двух одновибраторов 16 и 17. Выход генератора 11, на котором сформирован сигнал типа "меандр", соединен с первым выходом БУ, счетным входом триггера 14 и через инвертор 12 со счетным входом триггера 15, включенными по схеме делителя частоты (инвертирующий выход в каждом триггере соединен с его D-входом). Инвертирующий выход триггера 15 соединен также с вторым выходом БУ, неинвертирующий и инвертирующий выходы триггера 14 соединены соответственно с пятым выходом БУ и входом одновибратора 16 и инвертированным резервным пятым выходом (5) БУ, требующимся для некоторых вариантов исполнения источника 10. Выход одновибратора 16 соединен с четвертым выходом БУ и через инвертор 13 с входом одновибратора 17, выход которого подключен к третьему выходу БУ.
Примеры выполнения отключаемого источника 10 тока представлены на фиг. 5б. В простейшем случае это переменный резистор 18, регулирующий максимальную величину тока Ibb (при высоком уровне сигнала на пятом выходе БУ). Это могут быть источники тока на резисторе 19 и транзисторе 20, или ключе на транзисторе 22 с резистором 23 и стабилизаторе тока на полевом транзисторе 24 и резисторе 21. Функционально данные источника обеспечивают заданный ток питания датчика при высоком уровне сигнала на пятом выходе БУ и нулевой ток при низком. Два последних варианта выполнения источника 10 управления от резервного выхода БУ с инверсным относительного пятого вывода БУ сигналом.
Устройство работает следующим образом.
На вход инжекции датчика 1 подается постоянный ток с источника 4. В момент времени to (см. фиг.4) сбрасываются показания счетчика 6 (устанавливаются в заранее заданное нулевое или другое значение) сигналом с третьего выхода БУ, а сигналами с первого и второго выходов БУ соответственно мультиплексор 5 переводится в режим пропуска сигнала с буферного блока 2 и счетчик 6 в режим прямого счета. При этом происходит прямой счет импульсов с первого выхода датчика при высоком токе питания, определяемом сигналом с вывода 5. Через некоторый заданный период времени t1 (равный, например, 1 с, при этом показания счетчика будут равны частоте) сигналом на первом выходе БУ мультиплексора 5 переводится в режим пропуска сигнала с буферного блока 3, а сигналом с второго выхода БУ счетчик переводится в режим обратного счета. При этом показания счета по второму выходу датчика 1 вычитаются из показаний счета импульсов в первом канале и к моменту t2 на выходах счетчика формируется цифровой код, соответствующий разностной частоте F1(Ibb) F2(Ibb). В момент t2 сигналом с пятого выхода БУ изменяется ток питания датчика и в интервале t2-t3 происходит обратный счет импульсов на первом выходе датчика, а в интервал t3-t4 происходит прямой счет с его второго выхода. Таким образом, к показаниям счетчика добавляются значения счета частоты сигнала с второго выхода и отнимаются с первого выхода датчика при низком (нулевом) токе питания датчика, то есть происходит вычисление значения
Δ F F1(Ibb) F2(Ibb) Fi(0) + F2(0), что соответствует требуемой функции согласно предложенному способу. В момент t4 на четвертом выходе БУ образуется короткий импульс записи, по которому суммарный результат счета за интервал t0-t4 записывается в регистр 7 и по окончании данного импульса на третьем выходе БУ формируется сигнал предустановки (сброса) показаний счетчика 6 и цикл повторяется. Длительность импульсов на третьем и четвертом выходах БУ должна быть меньше половины минимального периода сигнала на выходах датчика, чтобы не вносить погрешность в результат счета. Лучше всего применять минимально возможную длительность данных импульсов для используемой элементной базы (например, около 1 мкс для ИМС серий К176 и К561). Результаты счета хранятся во время цикла счета в регистре 7 и отображаются индикатором 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАГНИТО- И ВИБРОТЕРАПИИ | 1998 |
|
RU2158616C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ | 1998 |
|
RU2138828C1 |
| СИСТЕМА АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ИЗБИРАТЕЛЬНОСТИ РАДИОПРИЕМНЫХ УСТРОЙСТВ | 2012 |
|
RU2484580C1 |
| ПАНОРАМНЫЙ РАДИОПРИЕМНИК | 2014 |
|
RU2540825C1 |
| УСТРОЙСТВО ПОИСКА И ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840447A1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| ЧАСТОТНО-АДАПТИВНАЯ РАДИОЛИНИЯ ДЛЯ ПЕРЕДАЧИ СРЕДНЕСКОРОСТНЫХ ПОТОКОВ ДИСКРЕТНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2142200C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЫСТРОЙ СИНХРОНИЗАЦИИ В СИСТЕМАХ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1989 |
|
SU1841074A1 |
Изобретение относится к измерительной технике и может быть использовано при определении параметров магнитных полей и магнитных свойств веществ. Предложенный способ позволяет повысить точность измерения индукции магнитного поля интегральным датчиком магнитного поля с частотным выходом за счет того, что наряду с подачей на вход инжекции интегрального датчика питающего тока инжекции, подачей нулевого потенциала на вход общей шины, снятием переменных сигналов с двух его выходов, измерением их частоты и обработкой полученных результатов, введены операции подачи на вход питания интегрального датчика магнитного поля с частотным выходом управляющего переменного сигнала прямоугольной формы типа "меандр" с частотой, не менее чем на порядок меньшей минимальной частоты сигналов на выходах датчика, раздельного определения значений разностей частот сигналов на двух выходах датчика при высоком уровне сигнала на входе питания датчика и при его низком уровне и вычитания при обработке друг из друга значений разностей сигналов на его выходах, полученных соответственно при высоком и низком уровнях сигнала на входе питания датчика. Устройство для осуществления способа имеет повышенную точность измерения за счет того, что в него кроме двух идентичных буферных схем, счетчика, регистра, индикатора и интегрального датчика магнитного поля с частотным выходом, вход инжекции которого соединен с источником тока инжекции, вход общей шины подключен к общей шине, первый и второй выходы соединены соответственно с входами первой и второй буферных схем, а выходы счетчика соединены с входами данных регистра, введены мультиплексор, блок управления и отключаемый источник тока питания, а счетчик выполнен реверсивным, при этом выходы первой и второй буферных схем соединены соответственно с первым и вторым входами мультиплексора, управляющий вход которого подключен к первому выходу блока управления, а выход к счетному входу счетчика, управляющий вход предустановки данных и вход изменения направления счета которого соединены соответственно с третьим и вторым выходами блока управления, а входы индикатора соединены с выходами данных регистра, вход разрешения записи данных которого подключен к четвертому выходу блока управления, пятый выход которого соединен через отключаемый источник тока питания с входом питания интегрального датчика магнитного поля с частотным выходом. Это позволяет значительно снизить аддитивную погрешность измерения индукции магнитного поля и соответственно повысить точность измерения интегральным датчиком магнитного поля с частотным выходом при уменьшении потребляемой датчиком мощности и сохранении всех его достоинств, как, например, высокая помехоустойчивость и удобство сопряжения с цифровыми системами. 2 с. п. ф-лы, 5 ил.
| Sensors and Actuators, A, v.A-28, 1991 г | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
