Изобретение относится к средствам пожаротушения, в частности к способу автоматического пожаротушения и к автоматической системе для его реализации.
Известен способ автоматического пожаротушения, который может быть использован также для смачивания сыпучих веществ, складируемых в защищаемой зоне, и автоматическая система для осуществления данного способа.
Способ состоит в том, что при достижении критической температуры в защищаемой зоне струю огнетушащей среды начинают распылять в направлении источника повышенной температуры с ее одновременным возвратно-поступательным перемещением в двух по существу взаимно-перпендикулярных направлениях по заранее заданному закону таким образом, что струя сканирует по сей защищаемой зоне.
Автоматическая система для осуществления способа содержит средства пожаротушения в виде одного лафетного ствола для распыления огнетушащей среды в направлении источника повышенной температуры, причем ствол выполнен с возможностью перемещения в двух по существу взаимно-перпендикулярных направлениях, средства подачи огнетушащей среды в лафетный ствол и приводной электродвигатель для перемещения ствола. В состав системы входит блок управления в виде двух программных дисков, подсоединенных к валу электродвигателя через редуктор и задающих характер движения ствола, и набора рычагов, тросов и возвратных пружин, кинематически связывающих программные диски с лафетным стволом. Система снабжена также тепловым датчиком, подключенным к входу электродвигателя и к входу средств подачи огнетушащей среды.
Лафетный ствол устанавливают таким образом, чтобы при его перемещении распыление огнетушащей среды осуществлялось по всей площади защищаемой зоны.
При достижении критической температуры в защищаемой зоне срабатывает тепловой датчик, питание подается на приводной двигатель и на выключение средств подачи огнетушащей среды. Вал приводного двигателя начинает вращаться и приводит в движение два программных диска, которые с помощью системы рычагов, тросов и возвратных пружин обеспечивают возвратно-поступательное перемещение лафетного ствола по заданной траектории в двух взаимно-перпендикулярных направлениях, причем первый программный диск задает перемещение лафетного ствола в первом направлении, а второй прогpаммный диск задает перемещение лафетного ствола во втором направлении. Одновременно срабатывают средства подачи огнетушащей среды, благодаря чему огнетушащая среда начинает поступать и распыляться через лафетный ствол в направлении источника повышенной температуры или пламени.
Сканирование лафетного ствола и, следовательно, струи огнетушащей среды в двух по существу взаимно-перпендикулярных направлениях обеспечивает большую площадь защищаемой зоны и более высокую эффективность пожаротушения, чем у систем с постоянным направлением подачи огнетушащей среды.
Однако, поскольку в известной системе траектория перемещения лафетного стола (струи) строго фиксирована и определяется размерами и рельефом программных дисков, а также отсутствует возможность наведения лафетного ствола (струи) непосредственно на источник пламени, то траектория перемещения лафетного ствола не может быть оперативно изменена в зависимости от конфигурации и координат источника пламени. Поэтому при пожаротушении лафетный ствол осуществляет сканирование всей защищаемой зоны, что увеличивает время тушения пожара и снижает эффективность системы пожаротушения.
Известен способ автоматического пожаротушения и автоматическая система для его осуществления. Способ состоит в том, что заранее задают размеры прямоугольной зоны, по которой будет осуществляться сканирование струи огнетушащей среды, и траекторию сканирования струи по этой зоне, при возникновении пожара начинают распылять струю огнетушащей среды, с помощью ручных средств управления наводят струю на источник пламени, затем в автоматическом режиме струю распыляют с ее одновременным возвратно-поступательным перемещением в двух по существу перпендикулярных направлениях таким образом, что струя сканирует по всей заранее заданной прямоугольной зоне, внутри которой находится источник пламени.
Автоматическая система для осуществления способа содержит средства пожаротушения в виде одного лафетного ствола для распыления огнетушащей среды в направлении источника пламени, причем ствол выполнен с возможностью перемещения в двух по существу взаимно-перпендикулярных направлениях, средства подачи огнетушащей среды в лафетный ствол и два приводных электродвигателя для перемещения ствола соответственно в первом и во втором направлениях. В состав системы также входит блок управления в виде микроконтроллера с памятью, управляющего приводными электродвигателями через соответствующую схему управления. Имеются также два датчика перемещения ствола соответственно в первом и во втором направлениях перемещения, выходы которых через аналогоцифровой преобразователь подключены к входам блока управления. К соответствующему входу блока управления подключен двухосевой джойстик для управления перемещением лафетного ствола в ручном режиме. Амплитуда перемещения лафетного ствола в одном из направлений (горизонтальном) задается с помощью задатчика амплитуды перемещений, также подключенного к входу блока управления. К соответствующему выходу блока управления подключен индикатор положения лафетного ствола, выполненный на основе световодов.
При возникновении пожара в защищаемой зоне оператор вручную джойстиком наводит лафетный ствол на источник пламени, определяя по индикатору положение лафетного ствола. После ручного наведения оператор включает автоматический режим работы системы. При этом в блоке управления начинает выполняться программа, записанная в его памяти, управления перемещением лафетного ствола. При выполнении этой программы на приводные электродвигатели через соответствующую схему управления подаются соответствующие управляющие сигналы, за счет чего осуществляется перемещение лафетного ствола по траектории, заданной программой.
Амплитуда перемещения лафетного ствола в горизонтальном направлении задается и может быть изменена оператором с помощью задатчика амплитуды перемещений. Амплитуда перемещения лафетного ствола в вертикальном направлении задается в программе как величина, пропорциональная амплитуде перемещения лафетного ствола в горизонтальном направлении. Сигналы с датчиков перемещения ствола используются для сравнения в микроконтроллере блока управления с заданными значениями амплитуд перемещения лафетного ствола в первом и втором направлениях и для выдачи информации о положении лафетного ствола на индикатор положения лафетного ствола.
Способ и система для его осуществления имеют более высокую эффективность пожаротушения, чем способ и система для его осуществления, приведенные выше, поскольку позволяют осуществлять наведение лафетного ствола на очаг пламени и регулировать амплитуду перемещения лафетного ствола.
Однако ни способ, ни система не являются автоматическими, поскольку подразумевают обязательное участие в процессе пожаротушения оператора.
Известен способ автоматического пожаротушения и автоматическая система для его осуществления.
Способ состоит в том, что при возникновении пожара осуществляют горизонтальное cканирование защищаемой зоны лафетным стволом, находящимся в начальный момент времени в крайнем верхнем положении, до пересечения продольной оси лафетного ствола с одной из границ источника пламени, затем прекращают горизонтальное сканирование защищаемой зоны лафетным стволом и начинают перемещать его вниз до пересечения с нижней границей источника пламени. Затем лафетный ствол фиксируют в данном положении и через него в течение заданного времени распыляют струю огнетушащей среды в направлении источника пламени. По истечении этого времени распыление огнетушащей среды прекращают, ствол перемещают в крайнее верхнее положение и еще раз осуществляют сканирование защищаемой зоны лафетным стволом. Если источник пламени не был ликвидирован, то все стадии способа повторяют.
Автоматическая система для осуществления способа содержит средства пожаротушения в виде одного лафетного ствола для распыления огнетушащей среды в направлении источника пламени, причем ствол выполнен с возможностью перемещения в двух взаимно-перпендикулярных направлениях, средства подачи огнетушащей среды в лафетный ствол и привод в виде двух гидроцилиндров для перемещения лафетного ствола соответственно в первом и во втором направлениях. В состав системы также входит блок управления в виде нескольких логических блоков и реле времени, подключенного к входу средств подачи огнетушащей среды в лафетный ствол, датчик обнаружения пламени и датчик цели, жестко установленный на лафетном стволе соосно ему, причем оба датчика подключены к входам блока управления.
В дежурном режиме лафетный ствол в одном из направлений его перемещения (горизонтальном) занимает любое положение, а в другом направлении его перемещения (вертикальном) занимает крайнее верхнее положение. При возникновении пожара в защищаемой зоне срабатывает датчик обнаружения пламени, сигнал с которого поступает в блок управления. Блок управления включает гидроцилиндр горизонтального перемещения, в результате чего лафетный ствол начинает горизонтальное перемещение вдоль защищаемой зоны. Как только датчик цели зафиксирует источник пламени, сигнал с этого датчика поступает в блок управления, который подает управляющий сигнал на прекращение горизонтального перемещения лафетного ствола и включает гидроцилиндр вертикального перемещения, в результате чего лафетный ствол начинает перемещаться вниз до тех пор, пока источник пламени не выйдет за пределы поля зрения датчика цели. В этом случае сигнал с датчика цели перестает поступать в блок управления, всякое перемещение лафетного ствола прекращается, и блок управления подает сигнал на включение средств подачи огнетушащей среды в лафетный ствол, за счет чего огнетушащая среда начинает поступать и распыляться через лафетный ствол в направлении источника пламени в течение времени, заданного реле времени. По истечении этого срока подача огнетушащей среды прекращается и начинается перемещение лафетного ствола вверх в исходное положение. Если пожар не потушен за один цикл, то работа устройства возобновляется по вышеуказанному алгоритму.
Способ и система для его осуществления позволяют осуществлять автоматическое наведение лафетного ствола непосредственно на источник пламени.
Однако, поскольку при распылении огнетушащей среды лафетный ствол находится в фиксированном положении, то эффективность тушения пожара снижается.
Кроме того, способ и система не в полной мере учитывают конфигурацию источника пламени, поскольку фактически наведение лафетного ствола производится по нижнему левому или правому краю источника пламени.
Цель изобретения создание такого способа автоматического пожаротушения, который позволял бы осуществлять полностью автоматизированное пожаротушение с помощью распыления струи огнетушащей среды с учетом координат и конфигурации источника пламени, а также создать автоматическую систему пожаротушения, имеющую конструкцию, позволяющую применять этот способ.
Для этого в способе автоматического пожаротушения, состоящем в том, что после обнаружения пожара в защищаемом зоне на источник пламени наводят средства подачи струи огнетушащей среды и распыляют струю в направлении источника пламени с одновременным возвратно-поступательным перемещением струи в двух по существу взаимно-перпендикулярных направлениях. Перед подачей огнетушащей среды определяют координаты границы пламени и амплитуду возвратно-поступательного перемещения струи выбирают соизмеримой с расстоянием между границами пламени.
Кроме того, автоматическая система пожаротушения, содержащая средства пожаротушения в виде по меньшей мере одного лафетного ствола для распыления огнетушащей среды, выполненного с возможностью перемещения в двух по существу взаимно-перпендикулярных направлениях, первый и второй приводные двигатели для перемещения лафетного ствола в первом и втором направлениях соответственно, средства подачи огнетушащей среды в лафетный ствол, блок управления, к соответствующим выходам которого подключены приводные двигатели, и вход управления средств подачи огнетушащей среды в лафетный ствол, датчик обнаружения пламени и датчик цели, имеющий рабочую ось, жестко установленный на лафетном стволе соосно ему, причем выходы этих датчиков подсоединены к соответствующим входам блока управления, снабжена датчиками перемещения ствола в первом и во втором направлениях, выходы которых подсоединены к соответствующим входам блока управления, блок управления оснащен элементом сравнения, к соответствующим входам которых подсоединены выходы датчика обнаружения пламени, датчика цели и датчиков перемещения ствола в первом и втором направлениях, программный блок с памятью, соответствующий выход которых соединен с соответствующим входом элемента сравнения, а соответствующий вход которых соединен с соответствующим выходом элемента сравнения и блоком определения амплитуды возвратно-поступательного перемещения лафетного ствола в функции координат источника пламени, вход которых соединен с соответствующим выходом памяти программных средств, выход которых соединен с соответствующим входом памяти программного блока, причем соответствующие выходы программного блока подключены к входам соответствующих приводных двигателей и к входу управления средствами подачи пожаротушащей среды в лафетный ствол.
Для повышения эффективности и работоспособности системы рекомендуется в качестве датчика обнаружения пламени использовать оптико-электрический датчик, содержащий оптический элемент, пропускающий излучение в инфракрасном диапазоне и имеющий рабочую зону с телесным углом 130-160о, и подключенные последовательно к его выходу усилитель фототока и аналоговый коммутатор, первый вход которого подсоединен непосредственно к выходу усилителя фототока, второй вход которого подсоединен к выходу усилителя фототока через электрический полосовой фильтр, а выход аналогового коммутатора через усилитель постоянного тока был бы подключен к соответствующему входу средств сравнения блока управления.
Для обеспечения пропускания излучения в инфракрасном диапазоне целесообразно, чтобы этот оптический элемент включал установленные последовательно на одной оси оптический фильтр в виде германиевой пластины толщиной 1,0-43,0 мм и фотоприемник.
Предпочтительно также, чтобы в качестве датчика цели использовался оптико-электрический датчик, содержащий оптический элемент, пропускающий излучение в инфракрасном диапазоне и имеющий рабочую зону с телесным углом 8-10о, и подключенные последовательно к его выходу усилитель фототока и аналоговый коммутатор, первый вход которого подсоединен непосредственно к выходу усилителя фототока, второй вход которого подсоединен к выходу усилителя фототока через электрический полосовой фильтр, а выход аналогового коммутатора через усилитель постоянного тока был бы подключен к соответствующему входу средств сравнения блока управления.
Для обеспечения пропускания излучения в инфракрасном диапазоне важно, чтобы этот оптический элемент включал установленные последовательно на одной оси фокусирующего линзу, оптический фильтр в виде германиевой пластины толщиной 1,0-3,0 мм и фотоприемник.
Для обеспечения возможности работы системы в различных режимах предпочтительно, чтобы система была оснащена средствами установки режима работы системы, подключенными к первому дополнительному входу программного блока.
Для обеспечения ручного управления приводными двигателями целесообразно, чтобы система была оснащена ручным задатчиком перемещения электродвигателей, подключенному к второму дополнительному входу программного блока.
Кроме этого, система должна быть оснащена индикатором готовности системы и режима ее работы, подключенным к первому дополнительному выходу программного блока, а также устройством управления открыванием и закрыванием жалюзи в защищаемом помещении, подключенным к второму дополнительному выходу программного блока.
Важно также, чтобы система была оснащена устройством выключения вентиляции, подключенным к второму дополнительному выходу программного блока.
Для передачи сообщения о возникновении пожара целесообразно, чтобы система была оснащена устройством подачи сигнала тревоги в телефонную линию связи, подключенным к второму дополнительному выходу программного блока.
Благодаря способу автоматического пожаротушения и автоматической системе для его реализации стало возможным полностью автоматизировать процесс пожаротушения и в полной мере учитывать различную конфигурацию источников пламени и значительно повысить эффективность пожаротушения.
Изобретение иллюстрируется чертежами, где на фиг.1 изображена блок-схема автоматической системы пожаротушения; на фиг.2 конструкция лафетного ствола, вид спереди; на фиг.3 то же, вид сверху; на фиг.4 конструкция и электрическая схема датчика обнаружения пламени; на фиг.5 конструкция и электрическая схема датчика цели; на фиг.6 блок-схема автоматической системы пожаротушения с дополнительным оборудованием.
Способ автоматического пожаротушения состоит в следующем:
определяют возникновение пожара любыми известными средствами, широко используемыми в данной области техники;
осуществляют сканирование защищаемой зоны по заранее заданному закону сканирования датчиком цели, в качестве которого используют любой датчик, способной фиксировать пламя, расположенное вдоль его рабочей оси;
определяют координаты источника пламени в защищаемой зоне и фиксируют их в памяти;
вычисляют с помощью широко известных вычислительных средств координаты прямоугольной зоны, в которой будет осуществляться пожаротушение, по фиксированным координатам источника пламени, причем вычисление координат прямоугольной зоны осуществляют таким образом, что источник пламени находится внутри этой зоны, а зона имеет размеры, соизмеримые с размерами источника пламени;
подают в лафетный ствол огнетушащую среду и распыляют ее через лафетный ствол;
сканируют лафетным стволом зону с координатами, вычисленными по фиксированным координатам источника пламени, причем сканирование осуществляют по заранее заданному закону сканирования, после чего осуществляют пожаротушение.
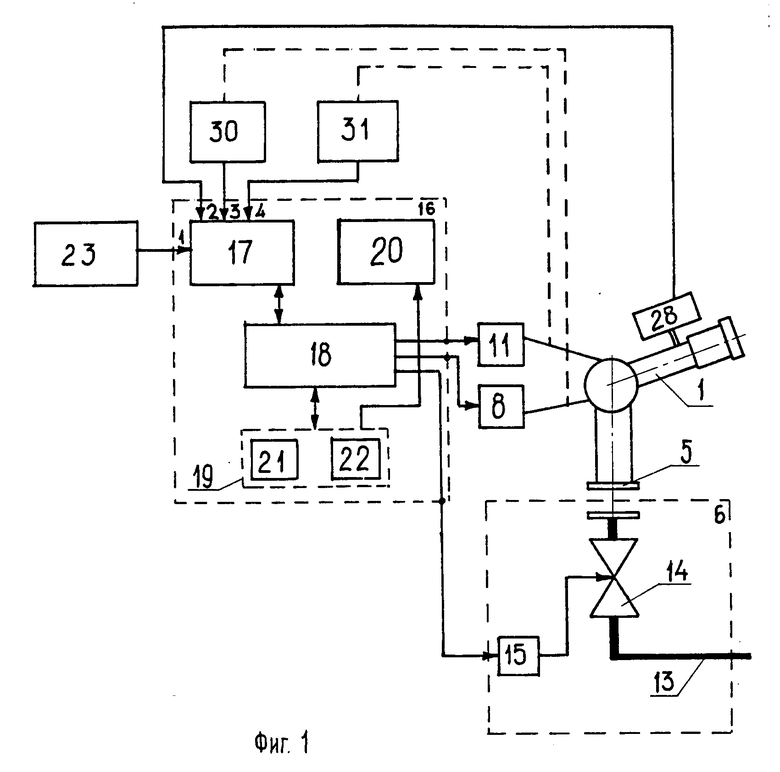
Автоматическая система пожаротушения, блок-схема которой изображена на фиг.1, содержит средства пожаротушения в виде одного или нескольких лафетных стволов 1 для распыления огнетушащей среды в направлении источника пламени.
В качестве лафетного ствола 1 может быть использован любой лафетный ствол, применяемый в данной области техники, выполненный с возможностью перемещения в двух по существу взаимно-перпендикулярных плоскостях.
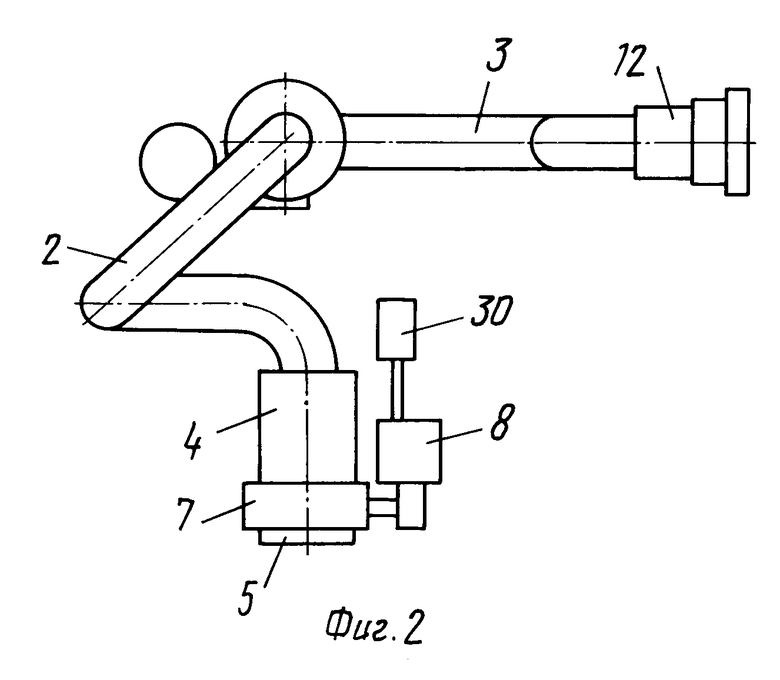
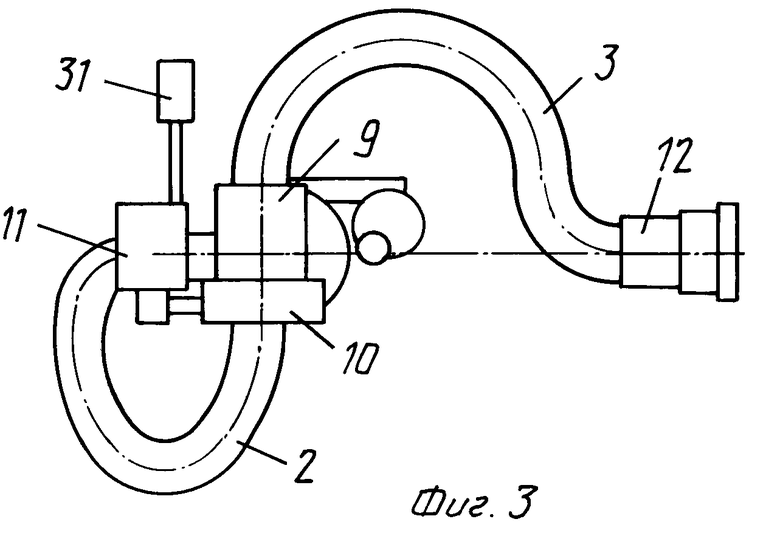
Лафетный ствол показан на фиг.2 и 3.
Лафетный ствол представляет собой гнутую трубу из эластичного материала, состоящую из двух секций 2 и 3. На нижнем прямом участке секции 2 лафетного ствола 1, соосно ей установлен поворотный механизм 4, на нижнем конце которого жестко укреплен фланец 5 для крепления лафетного ствола 1 к средствам 6 подачи огнетушащей среды (фиг.1). Фланец 5 может быть выполнен из любого черного металла с отверстиями под болтовое соединение со средствами 6 подачи огнетушащей среды. Поворотный механизм 4 выполнен в виде верхнего и нижнего стаканов, вставленных один в другой с возможностью поворота. В верхнем стакане имеется обойма запрессованным в ней зубчатым колесом. Верхний стакан выполнен с возможностью поворота относительно нижнего стакана, за счет вращения его в обойме. Верхний стакан жестко закреплен на нижнем прямом участке секции 2 лафетного ствола 1. Поворотный механизм 4 кинематически соединен через редуктор 7 с приводным двигателем 8 (фиг.1,2,3). В качестве приводного двигателя используют электродвигатель.
Электродвигатель 8, редуктор 7 и поворотный механизм 4 обеспечивают поворот лафетного ствола 1 в первом направлении на угол в пределах 0-240о.
В качестве редуктора 7 используют любой редуктор, широко известный в данной области техники.
Выбор электродвигателя 8 также не представляет труда для специалиста в данной области техники.
На нижнем прямом участке секции 3 лафетного ствола 1 соосно ей установлен поворотный механизм 9, кинематически соединенный через редуктор 10 с приводным двигателем 11 (электродвигателем) для поворота лафетного ствола 1 во втором направлении на угол в пределах 0-145о (фиг.1,2,3).
Поворотный механизм 9, редуктор 10 и электродвигатель 11 выполнены аналогично поворотному механизму 4, редуктору 7 и электродвигателю 8 соответственно.
На выходе лафетного ствола 1 размещен насадок 12 для формирования струи нужной конфигурации. Насадок 12 крепится на конец секции 3 лафетного ствола 1 любыми известными средствами и выполнен с возможностью снятия и замены на аналогичный.
Насадок 12 может быть выполнен практически из любого относительно прочного материала (металла, пластика и т.д.).
Средства 6 подачи огнетушащей среды в лафетный ствол 1 включают пожарную магистраль 13, запорный узел 14, служащий для открывания канала подачи огнетушащей среды к лафетному стволу 1 в нужный момент времени, и средства 15 управления запорным узлом 14.
В качестве запорного узла 14 может быть использована любая электрически управляемая водозапорная арматура, широко известная в данной области техники.
Запорный узел 14 выполнен в виде электрически управляемого электромагнитного клапана.
В качестве средств 15 управления запорным узлом 14 можно использовать любую из широко известных в данной области техники логических схем.
В состав системы входит блок 16 управления ее работой, имеющий четыре входа для получения информации и три выхода для выдачи управляющих сигналов.
Блок 16 управления может быть реализован на основе любых известных логических схем или выполнен в виде программируемого 8-, 16- или 32-разрядного микропроцессорного контроллера.
В качестве контроллера для данной автоматической системы пожаротушения может быть использован любой контроллер, широко известный в данной области техники.
В состав блока 16 управления входят элемент 17 сравнения, программный блок 18 с памятью 19, соединенные с элементом 17 сравнения, и блок 20 определения амплитуды возвратно-поступательного перемещения лафетного ствола 1, соединенные с памятью 19 программных средств 18.
Элемент 17 сравнения предназначен для сравнения текущих величин, подаваемых на соответствующие входы элемента 17 сравнения, с эталонными величинами, записанными в памяти 19 программных блоков 18.
Программный блок 18 предназначен для выбора и выполнения различных стандартных программ, записанных в памяти 19, и выполнен на основе микропроцессорных структур.
В состав памяти 19 входят оперативное запоминающее устройство 21 и постоянное запоминающее устройство 22. Оперативное запоминающее устройство 21 предназначено для запоминания текущих величин, а постоянное запоминающее устройство 22 для запоминания предварительно заданных постоянных величин и управляющих программ.
В качестве оперативного запоминающего устройства 21 обычно используют большие интегральные схемы (БИС) статической либо динамической памяти с архитектурой, определяемой используемым микропроцессорным контроллером.
В качестве постоянного запоминающего устройства 22 могут быть использованы, например перепрограммируемые запоминающие БИС с ультрафиолетовым стиранием.
Блок 20 определения амплитуды возвратно-поступательного перемещения лафетного ствола 1 предназначен для считывания из памяти 19 программного блока 18 численных значений, выполнения вычислений с этими численными значениями и передачи результатов вычислений в память 19 программного блока 18.
Датчик 23 обнаружения пламени, выход которого через аналого-цифровой преобразователь (на фиг.1 не показан) подключен к первому входу элемента 17 сравнения блока 16 управления. Аналого-цифровой преобразователь предназначен для преобразования аналогового сигнала, поступающего с датчика в цифровой сигнал, воспринимаемый блоком 16 управления. Датчик 23 обнаружения пламени предназначен для определения пожара в защищаемой зоне и подачи соответствующего сигнала на вход блока 16 управления.
В качестве датчика 23 обнаружения пламени, пожара могут использоваться оптические и любые другие датчики, способные выдавать электрический сигнал при возникновении пожара.
Для повышения эффективности и работоспособности системы применяется оптико-электрический датчик (фиг.4) инфракрасного диапазона, воспринимающий несколько параметров, в частности интегральную характеристику инфракрасного излучения защищаемой зоны при пожаре и без него и частотную зависимость мерцания пламени.
Контроль за интегральной характеристикой инфракрасного излучения защищаемой зоны при пожаре и без него и за частотной зависимостью мерцания пламени позволяет повысить надежность срабатывания системы, а также избежать ее ложного срабатывания при наличии различных световых отражений и посторонних источников света.
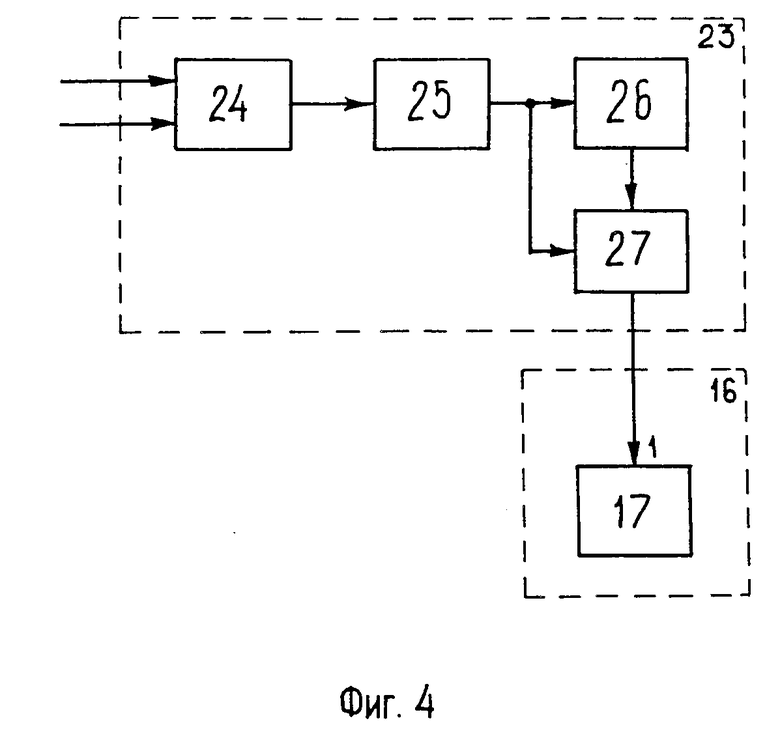
В состав датчика 23 обнаружения пламени входят оптический элемент 24, усилитель 25 фототока, электрический полосовой фильтр 26 и аналоговый коммутатор 27.
В качестве оптического элемента 24 может быть использован любой оптический элемент, пропускающий излучение в инфракрасном диапазоне, имеющий рабочую зону с телесным углом, достаточным для охвата всей защищаемой зоны, т. е. на практике с телесным углом 130-160о и преобразующий инфракрасную составляющую излучения в соответствующий электрический сигналь. В предлагаемой системе в качестве оптического элемента 24 используют фотоприемник инфракрасного диапазона и оптический фильтр, установленный на входе фотоприемника. Фотоприемник инфракрасного диапазона широко известен в данной области техники. Оптический фильтр представляет собой германиевую пластину толщиной 1,0-3,0 мм.
Остальные элементы оптико-электрического датчика широко известны и не нуждаются в подробном описании.
Выход оптического элемента 24 подсоединен к входу усилителя 25 фототока.
Выход усилителя 25 фототока подсоединен непосредственно к первому входу аналогового коммутатора 27 и через электрический полосовой фильтр 26 к второму входу аналогового коммутатора 27. Выход аналогового коммутатора 27 через усилитель постоянного тока (на фиг.4 не показан) подключен к первому входу элемента 17 сравнения блока 16 управления.
При отсутствии пожара на вход оптического элемента 24 поступает сигнал, характеризующий естественное фоновое инфракрасное излучение защищаемой зоны. Оптический фильтр 24 пропускает только инфракрасную составляющую излучения, которая преобразуется в электрический сигнал в фотоприемнике инфракрасного диапазона. Далее электрический сигнал, усиленный в усилителе 25 фототока, поступает на первый вход аналогового коммутатора 27, который через усилитель постоянного тока подает его на первый вход элемента 17 сравнения блока 16 управления.
Поскольку при отсутствии пожара сигнал имеет слабую низкочастотную составляющую, то через электрический полосовой фильтр 26 на второй вход аналогового коммутатора 27 поступает нулевой сигнал.
При возникновении пожара на вход оптического элемента 24 поступает мощный сигнал с низкочастотной составляющей, поэтому на первом входе аналогового коммутатора 27 присутствует сигнал, характеризующий яркость источника пламени, а на втором входе аналогового коммутатора 27 присутствует сигнал с выделенной в электрическом полосовом фильтре 26 низкочастотной составляющей, характерной для источников пламени. Эти сигналы через усилитель постоянного тока последовательно, сначала сигнал, присутствующий на первом входе аналогового коммутатора 27, а затем сигнал, присутствующий на втором входе аналогового коммутатора 27, подаются на первый вход элемента 17 сравнения блока 16 управления.
Система также снабжена датчиком 28 цели, рабочая ось которого совпадает с осью лафетного ствола 1. Выход датчика 28 цели через аналого-цифровой преобразователь (на фиг. 1 не показан) подключен к второму входу элемента 17 сравнения блока 16 управления. Датчик 28 цели жестко установлен на лафетном стволе 1 и перемещается вместе с ним. Датчик 28 цели предназначен для определения наличия пламени вдоль его рабочей оси и подачи соответствующего сигнала на вход блока 16 управления.
В качестве датчика 28 цели может быть использован любой датчик, имеющий рабочую зону с телесным углом 8-10о и способный выдавать электрический сигнал при возникновении пожара в этой узкой рабочей зоне.
Как правило, используют оптико-электрический датчик, однако возможно, например использование телекамер инфракрасного диапазона
Для повышения эффективности и работоспособности системы в качестве датчика 28 цели используется оптикоэлектрический датчик (фиг.5) инфракрасного диапазона, воспринимающий так же, как и используемый оптико-электрический датчик 23 обнаружения пламени, несколько параметров, в частности характеристику инфракрасного излучения его рабочей зоны при пожаре и без него и частотную зависимость мерцания пламени в этой зоне.
Основные элементы датчика 28 цели, т.е. оптический элемент 24, пропускающий излучение в инфракрасном диапазоне и имеющий рабочую зону с телесным углом 130-160о, усилитель 25 фототока, электрический полосовой фильтр 26 и аналоговый коммутатор 27, те же, что и у датчика 23 обнаружения пламени.
Его основное отличие от используемого в данной системе датчика 23 обнаружения пламени заключается в наличии фокусирующей линзы 29, входящей в состав оптического элемента 24 и сужающей рабочую зону оптического фильтра до 8-10о. Кроме того, электрический полосовой фильтр 26 датчика подобран таким образом, чтобы выделять такую низкочастотную составляющую сигнала, которая характерна для границ источников пламени, что повышает точность определения границ источников пламени.
В остальном работа датчика 28 цели аналогична работе датчика 23 обнаружения пламени.
Система содержит также датчики 30, 31 перемещения лафетного ствола 1 в первом и втором направлениях соответственно, выходы которых через аналого-цифровой преобразователь (на фиг.1 не показан) подключены к третьему и четвертому входам элементов 17 сравнения блока 16 управления. Датчики 30, 31 перемещения лафетного ствола 1 предназначены для выдачи на блок 16 управления сигналов, пропорциональных перемещениям лафетного ствола 1.
В качестве этих датчиков могут быть использованы любые датчики углового перемещения, выдающие на входы электрический сигнал, пропорциональный угловому перемещению контролируемого устройства.
В предлагаемой системе в качестве датчиков используется потенциометрический датчик, вал которого жестко соединен с валом соответствующего редуктора 7, 10. Таким образом, при включении соответствующего электродвигателя 8, 11 и повороте его вала датчики 30, 31 перемещения лафетного ствола 1 выдают на выходе сигнал, пропорциональный повороту лафетного ствола 1 в первом и втором направлениях соответственно.
Первый и второй выходы блока 16 управления через соответствующую схему управления электродвигателями (на фиг.1 не показана) подключены к электродвигателям 8 и 11 соответственно для выдачи управляющих сигналов на перемещение ствола в первом и втором направлениях. Схема управления электродвигателя необходима для преобразования управляющего сигнала с блока 18 управления в силовой сигнал, пропорциональный угловому перемещению вала электродвигателя. 8 и 11 соответственно для выдачи управляющих сигналов на перемещение ствола в первом и втором направлениях. Схема управления электродвигателями необходима для преобразования управляющего сигнала с блока 16 управления в силовой сигнал, пропорциональный угловому перемещению вала электродвигателя.Третий выход блока 16 управления подключен к входу средства 15 управления запорным узлом 14 для выдачи управляющего сигнала на начало подачи огнетушащей среды к лафетному стволу 1.
Система также может включать средства 32 установки режима работы системы (фиг. 6), ручной задатчик 33 перемещения электродвигателей 8, 11 и индикатор 34 готовности системы и режима ее работы.
В этом случае блок 16 управления имеет два дополнительных входа и один дополнительный выход.
Средства 32 установки режима работы системы предназначены для задания оператором вручную одного из возможных режимов работы системы и выдачи соответствующего управляющего сигнала на вход блока 16 управления.
Средства 32 установки режима работы системы могут быть выполнены в виде любого коммутационного элемента с памятью.
Средства 32 установки режима работы предлагаемой системы выполнены в форме кнопочного переключателя с фиксацией положения, подключенного к первому дополнительному входу блока 16 управления.
С помощью средств 32 установки режима работы системы могут быть установлены следующие режимы работы системы: автоматический, ручной, обучение, выполнение, тестирование. Исходным режимом работы системы является автоматический, и если в системе не предусмотрены средства 32 установки режима работы системы, то блок 16 настроен на автоматический режим.
Ручной задатчик 33 перемещения электродвигателей 8, 11 предназначен для выдачи соответствующего управляющего сигнала на вход блока 16 управления в ручном режиме работы системы и в режиме обучения для ручного управления электродвигателями, причем величина этого управляющего сигнала пропорциональна перемещению лафетного ствола 1 в одном или сразу в двух направлениях его перемещения.
Ручной задатчик 33 перемещения электродвигателей 8, 11 может быть выполнен в виде любого набора коммутационных элементов, время включения которых пропорционально длительности соответствующего управляющего сигнала.
Ручной задатчик 33 перемещения электродвигателей 8, 11 выполнен в форме четырехкнопочного набора с кнопками "вверх", "вниз", "влево", "вправо", выдающего управляющие сигналы, пропорциональные времени нажатия соответствующей кнопки для перемещения лафетного ствола 1 в нужном направлении. Выход ручного задатчика 33 подключен к второму дополнительному входу блока 16 управления.
В качестве индикатора 34 готовности системы и режима ее работы может быть выбрано любое средство отображения, показывающее выполняемый режим работы системы, например дисплей на световодах.
Индикатор 34 готовности предлагаемой системы и режима ее работы выполнен в виде набора световодов.
Индикатор 34 подключен к первому дополнительному выходу блока 16 управления.
В блоке 16 управления также может быть предусмотрен второй дополнительный выход для выдачи управляющих сигналов на дополнительное инженерное оборудование, включающее устройство управления открыванием и закрыванием жалюзи в защищаемом помещении, устройство выключения вентиляции, устройство подачи сигнала тревоги в телефонную линию связи и т.д. управляющий сигнал на которые выдается блоком 16 управления в случае возникновения пожара.
Автоматическая система пожаротушения работает следующим образом.
При включении системы напряжение питания подается на блок 16 управления, датчик 23 обнаружения пламени, датчик 28 цели и датчики 30, 31 перемещения лафетного ствола 1.
Программный блок 18 дает команду на активизацию первого входа элемента 17 сравнения и подают управляющий сигнал на индикатор 34 готовности системы и режима ее работы, на котором начинает светиться световод, соответствующий автоматическому режиму работы системы. Второй, третий и четвертый входы элемента 17 сравнения блокированы. Датчик 23 обнаружения пламени выдает на первый вход элемента 17 сравнения сигнал, свидетельствующий об отсутствии пожара в защищаемой зоне. Этот сигнал может быть различным в зависимости от типа используемого датчика. В частности, при использовании оптико-электрического датчика это может быть сигнал, показывающий интегральную характеристику инфракрасного фонового излучения защищаемой зоны. Данный сигнал сравнивается с нулевым значением в первом канале элемента 17 сравнения и запоминается в оперативном запоминающем устройстве в качестве эталонного значения, свидетельствующего об отсутствии пожара в защищаемой зоне.
Программный блок 18 дает команду на подачу данного эталонного значения в первый канал элемента 17 сравнения. Датчик 23 обнаружения пламени выдает на первый вход элемента 17 сравнения сигнал, свидетельствующий об отсутствии пожара в защищаемой зоне, периодически, через определенный промежуток времени. Данный сигнал сравнивается с эталонным значением в первом канале элемента 17 сравнения. Через определенный, но более длительный промежуток времени, при поступлении очередного сигнала с датчика 23 обнаружения пламени, свидетельствующего об отсутствии пожара в защищаемой зоне, программный блок 18 дает команду на запоминание нового сигнала в оперативном запоминающем устройстве 21 в качестве нового эталонного значения и на подачу его в тот же канал элемента 17 сравнения. Таким образом достигается периодическое обновление эталонного значения интегрального инфракрасного фонового излучения защищаемой зоны в отсутствие пожара, полученного датчиком 23 обнаружения пламени, в памяти 19 программного блока 18 и в первом канале элемента 17 сравнения.
После запоминания в оперативном запоминающем устройстве 21 эталонного значения интегрального инфракрасного фонового излучения защищаемой зоны в отсутствие пожара, полученного датчиком 23 обнаружения пламени, программный блок 18 вызывает из постоянного запоминающего устройства 22 программу формирования инфракрасного фонового излучения защищаемой зоны, полученного датчиком 28 цели. При этом программный блок 18 активизирует второй, третий и четвертый входы элемента 17 сравнения, причем на третий и четвертый его входы подаются граничные значения координат защищаемой зоны в первом и втором направлениях перемещения лафетного ствола 1, а также подают сигналы управления на электродвигатели 8, 11 для осуществления сканирования лафетным стволом 1 всей очищаемой зоны по заранее заданному программой сканирования закону. Граничные значения координат заводятся на третий и четвертый каналы элемента 17 сравнения для определения границ сканирования лафетным стволом 1 защищаемой зоны. Датчик 28 цели постоянно выдает на второй вход элемента 17 сравнения сигнал, пропорциональный значению инфракрасного фонового излучения его узкой рабочей зоны, а датчики 30, 31 также постоянно выдают сигналы на третий и четвертый входы элемента 17 сравнения, пропорциональные перемещениям лафетного ствола 1 в первом и во втором направлениях соответственно. Сигнал с датчика 28 цели сравнивается с нулевым значением во втором канале элемента 17 сравнения и запоминается в оперативном запоминающем устройстве 21, а сигналы с датчиков 30, 31 в этот же момент времени сравниваются в третьем и четвертом каналах элемента 17 сравнения с соответствующими граничными значениями координат защищаемой зоны и также запоминаются оперативным запоминающим устройством 21. Таким образом, сигнал с датчика 28 цели запоминается в качестве эталонного значения инфракрасного фонового излучения рабочей зоны датчика 28 цели с координатами, соответствующими сигналам с датчиков 30, 31 в данный момент времени. Данные сигналы поступают постоянно, но обрабатываются дискретно. Дискретность обработки подбирают таким образом, что за период между последующей и предыдущей стадиями обработки лафетный ствол 1 успевает пройти такое расстояние, что датчик 28 цели перемещается ровно на одну свою узкую рабочую зону. Таким образом, каждое значение сигнала с датчика 28 цели соответствует определенным координатам с датчиков 30, 31. По окончании сканирования всей защищаемой зоны формируется эталонное значение фонового излучения защищаемой зоны в отсутствие пожара, полученное датчиком 28 цели, которое подается по команде программного блока 18 на второй канал элемента 17 сравнения. Эталонное значение фонового излучения защищаемой зоны в отсутствие пожара, полученное датчиком 28 цели может также обновляться с определенной цикличностью.
При возникновении пожара в защищаемой зоне датчик 23 обнаружения пламени выдает на первый вход элемента 17 сравнения последовательно сначала сигнал, присутствующий на первом входе аналогового коммутатора 27, а затем сигнал, присутствующий на втором входе аналогового коммутатора 27.
Если хотя бы один из этих сигналов резко отличается по своим параметрам от эталонного значения, то элемент 17 сравнения выдает соответствующее сообщение в программный блок 18. Программный блок 18 выдает управляющий сигнал на вызов из постоянного запоминающего устройства 22 программы сканирования, согласно которой из программного блока 18 на приводные электродвигатели 8, 11 подаются управляющие сигналы на сканирование лафетным стволом 1 всей защищаемой зоны по заранее заданному программой сканирования закону. Одновременно активизируются второй, третий и четвертый входы элемента 17 сравнения, с помощью чего сигналы с датчика 28 цели и с датчиков 30, 31 перемещения лафетного ствола 1 начинают поступать на второй, третий и четвертый входы элемента 17 сравнения.
Кроме того, согласно программе сканирования:
во второй канал элемента 17 сравнения из оперативного запоминающего устройства 21 подается текущее значение эталонного фонового излучения защищаемой зоны в отсутствие пожара, полученное датчиком 28 цели, соответствующее текущим координатам, полученным с датчиков 30, 31;
в третий канал элемента 17 сравнения из постоянного запоминающего устройства 22 подаются граничные значения координат защищаемой зоны в первом направлении перемещения лафетного ствола 1;
в четвертый канал элемента 17 сравнения из постоянного запоминающего устройства 22 подаются граничные значения координат защищаемой зоны во втором направлении перемещения лафетного ствола 1.
При сканировании защищаемой зоны лафетным стволом 1 датчики 30 или 31 перемещения лафетного ствола 1 выдают на третий и четвертый входы элемента 17 сравнения сигналы, пропорциональные его перемещениям в первом и во втором направлениях, и по достижении лафетным стволом 1 одного из граничных значений защищаемой зоны в первом направлении перемещения лафетного ствола 1 с элемента 17 сравнения на программный блок 18 подается соответствующий сигнал, в ответ на который программный блок 18 выдает управляющий сигнал на приводные электродвигатели 8, 11 на прекращение сканирования в первом направлении и на перемещение лафетного ствола 1 на заданное программой расстояние во втором направлении, а затем на продолжение сканирования в первом, но в противоположном направлении, а по достижении лафетным стволом 1 одного из граничных значений защищаемой зоны во втором направлении перемещения лафетного ствола 1 с элемента 17 сравнения на программный блок 18 подается соответствующий сигнал, в ответ на который программный блок 18 выдает управляющий сигнал на приводные электродвигатели 8, 11 на конец сканирования защищаемой зоны.
Как уже упоминалось выше, по текущим значениям координат с датчиков 30, 31, которые поступают в программный блок 18 элемента 17 сравнения, программный блок 18 вызывают из оперативного запоминающего устройства 21 и подают на второй канал элемента 17 сравнения текущие значения эталонного фонового излучения защищаемой зоны в отсутствие пожара, полученные датчиком 28 цели.
Эти значения во втором канале элемента 17 сравнения сравниваются с текущими значениями, полученными при сканировании датчиком 28 цели тех точек защищаемой зоны, которые имеют такие же координаты. При обнаружении источника пламени датчик 28 цели выдает на второй вход элемента 17 сравнения последовательно, сначала сигнал, присутствующий на первом входе аналогового коммутатора 27, а затем сигнал, присутствующий на втором входе аналогового коммутатора 27.
Если хотя бы один из этих сигналов резко отличается по своим параметрам от эталонного значения, то элемент 17 сравнения выдает сообщение на программный блок 18, которые подает команду на запоминание в оперативном запоминающем устройстве 21 соответствующих этому моменту времени текущих значений с датчиков 30 и 31. Таким образом, в оперативном запоминающем устройстве 21 к моменту окончания сканирования лафетным стволом 1 защищаемой зоны имеет набор координат, характеризующих конфигурацию источника пламени.
После окончания сканирования лафетным стволом 1 защищаемой зоны элемент 17 сравнения выдает соответствующее сообщение на программный блок 18, который дают команду на блок 20 определения амплитуды возвратно-поступательного перемещения лафетного ствола 1. Блок 20 вызывает из оперативного запоминающего устройства 21 указанный набор координат и вычисляет новые граничные значения координат перемещения лафетного ствола 1 в первом и во втором направлениях. Алгоритм вычисления подобран так, что новая скорректированная зона сканирования представляет собой прямоугольник, охватывающий контур очага пламени и незначительно превышающий его по площади.
Данные граничные значения подаются в третий и четвертый каналы элемента 17 сравнения соответственно. Одновременно на программный блок 18 выдается соответствующее сообщение, в ответ на которое программный блок 18 выдает управляющий сигнал на повторный выход из постоянного запоминающего устройства 22 программы сканирования, а также управляющий сигнал на средства 15 управления запорным узлом 14. Средства 15 выдают управляющий сигнал на открытие запорного узла 14, с помощью чего огнетушащая среда начинает подаваться в лафетный ствол 1 и распыляться в направлении источника пламени. В этом случае сканирование лафетным стволом 1 защищаемой зоны осуществляется в пределах, ограниченных новыми граничными значениями координат перемещения лафетного ствола 1 в первом и во втором направлениях. Сканирование осуществляется в течение заданного времени, заведомо превышающего время тушения пожара. Данное время задается с помощью реле времени (на чертежах не показано).
Для перевода системы в ручной режим работы необходимо нажать кнопку "ручной режим" на средствах 32 установки режима работы системы. В этом случае подается соответствующее сообщение со средств 32 на программный блок 19, который активизирует ручной задатчик 33 перемещения электродвигателей 8, 11 и подает управляющий сигнал на индикатор 34 готовности системы и режим ее работы, на котором показывается состояние системы в виде свечения соответствующего световода. Для начала осуществления подачи огнетушащей среды в лафетный ствол 1 необходимо нажать кнопку "подача" на средствах 32 установки режима работы системы. В этом случае программный блок 18 подает управляющий сигнал на средства 15 управления запорным узлом 16 для открытия запорного узла 14, с помощью чего огнетушащая сpеда начинает подаваться в лафетный ствол 1 и распыляться в направлении источника пламени.
При нажатии какой-либо кнопки ручного задатчика 33 и удержания ее в нажатом состоянии на программный блок 18 подается соответствующий сигнал на перемещение лафетного ствола 1 в направлении, указанном на кнопке. Программные средства 19 формируют и подают на соответствующий электродвигатель 8, 11 управляющий сигнал на перемещение лафетного ствола 1 в указанном направлении, в результате чего лафетный ствол 1 перемещается в желаемом направлении до того момента, пока кнопка ручного задатчика 33 удерживается в нажатом состоянии.
В ручном режиме работы системы предусмотрена возможность одновременного перемещения лафетного ствола 1 в двух направлениях. Для этого необходимо одновременно нажать и удерживать одну какую-либо кнопку ручного задатчика 33 для перемещения лафетного ствола 1 в первом направлении и одну какую-либо кнопку для перемещения лафетного ствола 1 во втором направлении.
Для окончания работы системы в ручном режиме необходимо нажать кнопку "останов". В этом случае подается соответствующее сообщение со средств 32 на программный блок 18, который подает управляющий сигнал на средства 15 управления запорным узлом 14 для его закрытия и блокирует второй дополнительный вход блока 16 управления.
Для перевода системы в режим обучения необходимо нажать кнопку "обучение" на средствах 32 установки режима работы системы. В этом случае подается соответствующее сообщение со средств 32 на программный блок 18, который активизирует ручной задатчик 33 перемещения электродвигателей 8, 11, третий и четвертый входы элемента 17 сравнения, с помощью чего сигналы с датчиков 30, 31 перемещения лафетного ствола 1 начинают поступать на третий и четвертый входы элемента 17 сравнения, выдают управляющий сигнал на вызов из постоянного запоминающего устройства 22 программы обучения, согласно которой текущие значения перемещения лафетного ствола 1 с датчиков 30 и 31 поступают на третий и четвертый входы элемента 17 сравнения, затем напрямую без операции сравнения в оперативное запоминающее устройство 21 программного блока 18, где они запоминаются, и подают управляющий сигнал на индикатор 34 готовности системы и режима ее работы, на котором показывается состояние системы в виде свечения соответствующего световода.
При нажатии какой-либо кнопки ручного задатчика 33 и удержания ее в нажатом состоянии, как и в ручном режиме, программный блок 18 формирует и подает на соответствующий электродвигатель 8, 11 управляющий сигнал на перемещение лафетного ствола 1 в направлении, указанном на кнопке, в результате чего лафетный ствол 1 перемещается в желаемом направлении до того момента, пока кнопка ручного задатчика 33 удерживается в нажатом состоянии. Как было указано выше, в этом случае текущие координаты перемещения лафетного ствола 1 запоминаются в оперативном запоминающем устройстве 21. Режим "обучение" прекращается нажатием кнопки "выполнение". При этом подается соответствующее сообщение со средств 32 на программный блок 18, который выдает управляющий сигнал на вызов из постоянного запоминающего устройства 22 программы выполнения и подает управляющий сигнал на средства 15 управления запорным узлом 11 для его открытия, с помощью чего огнетушащая среда начинает подаваться в лафетный ствол 1 и распыляться в направлении источника пламени. Согласно данной программе программный блок 18 считывает из оперативного запоминающего устройства 21 запомненные координаты перемещения лафетного ствола 1, формирует и подает на соответствующие электродвигатели 8,11 управляющие сигналы на перемещение лафетного ствола 1 в соответствии с указанными запомненными координатами, в результате чего лафетный ствол 1 перемещается по траектории, по которой он перемещался в режиме обучения.
По окончании отработки системой программы выполнения программный блок 18 вновь вызывает из постоянного запоминающего устройства 22 программу выполнения. Для окончания работы системы в режиме "выполнение" необходимо нажать кнопку "останов".
Таким образом, в системе предусмотрен ручной выбор траектории перемещения лафетного ствола, запоминание этой траектории и осуществление пожаротушения с помощью перемещения лафетного ствола по этой траектории.
В системе также может быть предусмотрен режим тестирования.
Данная система может применяться для защиты сложных объектов, таких, как ангары, машинные залы электростанций, нефтеперерабатывающие установки, нефтедобывающие предприятия и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ИМПУЛЬСНОГО ПОЖАРОТУШЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2288015C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292930C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2104073C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2411974C1 |
| Способ автоматического пожаротушения и автоматическая система для его осуществления | 2021 |
|
RU2772200C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С ТРАНСПОРТИРОВКОЙ СРЕДСТВ ПОЖАРОТУШЕНИЯ К ОЧАГУ ПОЖАРА ПОДЪЕМНО-ТРАНСПОРТНЫМ ОБОРУДОВАНИЕМ ЗАЩИЩАЕМОГО ОБЪЕКТА | 2010 |
|
RU2435621C2 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |


Изобретение относится к средствам для пожаротушения, в частности к способу автоматического пожаротушения и к автоматической системе для его реализации. Сущность изобретения состоит в том, что в способе автоматического пожаротушения перед подачей огнетушающей среды определяют координаты границ пламени и амплитуду возвратно-поступательного перемещения струи, выбирают соизмеримой с расстоянием между границами пламени. Автоматическая система пожаротушения содержит лафетный ствол для расширения огнетушащей среды, выполненный с возможностью перемещения в двух взаимно-перпендикулярных направленных, первый и второй приводные двигатели для перемещения лафетного ствола, средства подачи огнетушащей среды в лафетный ствол, блок управления со средствами сравнения, программный блок с памятью и блоком определения амплитуды возвратно-поступательного перемещения лафетного ствола в функции координат источника пламени, датчики перемещения ствола в первом и втором направлениях, датчик обнаружения пламени и датчик цели, имеющий рабочую ось, жестко установленный на лафетном стволе соосно массе. 2 с. и 8 з. п. ф-лы, 6 ил.
10o, усилитель фототока, подключенный к выходу оптического элемента, аналоговый коммутатор, полосовой фильтр, усилитель постоянного тока, причем первый вход аналогового коммутатора подсоединен к выходу усилителя фототока непосредственно, а второй вход через полосовой фильтр, а выход аналогового коммутатора подключен к усилителю постоянного тока, выход которого является выходом датчика цели.
| УСТРОЙСТВО для НАВЕДЕНИЯ ОГНЕТУШАЩЕЙ СТРУИ НА ОЧАГ НОЖАРА | 0 |
|
SU370950A1 |
