Изобретение относится к технологии пожаротушения, а именно к автоматическим средствам пожаротушения, и может быть использовано для тушения пожаров.
Известна система сбора данных и автоматической пожарной сигнализации, которая имеет систему датчиков для определения в аналоговой форме изменения физических параметров (задымления, температуры), вызванного пожаром, и выдачи выходных сигналов в аналоговой форме, фильтр с блоком дискретизации, обеспечивающим выборку данных, поступающих в виде аналоговых сигналов, вычислительный блок для расчета величины скользящего среднего выборки данных на выходе блока дискретизации и блок управления, который задает период квантования, осуществляемого блоком дискретизации, и число данных, используемых при вычислении величины скользящего среднего, для подачи управляющего сигнала и систему автоматической сигнализации (см. заявку Франции N 1580937, кл. А 62 С 37/24, 1986).
Недостатком известной системы является невысокая эффективность определения очага пожара, а также невозможность осуществления пожаротушения.
Также известна установка контроля для предотвращения несчастных случаев, главным образом, пожаров, которая содержит один или несколько релейных блоков, каждый из которых снабжен схемой памяти и блоком управления, приемник для контроля релейных блоков и управления ими путем передачи информации в зависимости от данных, записанных в схемах памяти релейных блоков, блоки передачи-записи данных для отбора данных из релейного блока, предварительно записанных в блоке памяти приемника, а также для передачи и записи их в схеме памяти релейных блоков,и блок проверки данных для считывания данных, записанных в схеме памяти релейных блоков, передачи их в приемник и проверки соответствия предварительно записанных данных релейного блока с данными, записанными в схеме памяти релейных блоков, при этом схема памяти допускает перезапись данных, а блок управления предназначен для контроля нескольких терминалов, которые подключаются к блокам исполнения в зависимости от данных, записанных в схеме памяти (см. заявку Франции N 2634928, кл. G 08 В 29/00, 1990).
Недостатком данной установки является невысокая эффективность определения очага пожара и осуществления автоматического пожаротушения.
Известен реализуемый с помощью автоматической лафетной установки для тушения пожаров способ автоматического пожаротушения, который состоит в том, что при достижении критической температуры в защищаемой зоне струю огнетушащего вещества начинают распылять в направлении источника повышенной температуры с ее одновременным возвратно-поступательным перемещением в двух взаимно перпендикулярных направлениях по заранее заданному закону таким образом, что струя огнетушащего вещества сканирует всю защищаемую зону (см. авторское свидетельство СССР N 689683, кл. А 62 С 37/00, 1979).
Однако данный способ также обладает низкой эффективностью пожаротушения из-за невысокого быстродействия.
Наиболее близким к изобретению является способ автоматического пожаротушения, заключающийся в установке автоматической системы пожаротушения в состояние ожидания пожарной опасности, определении при возникновении пожарной опасности с помощью расположенных на лафетном стволе автоматической системы пожаротушения средств регистрации координат открытого пламени в выбранной зоне обзора относительно лафетного ствола, подаче огнетушащего вещества в очаг пожара и контроле подачи огнетушащего вещества в очаг пожара (см. патент РФ N 2046613, кл. А 62 С 35/11, 1995).
Недостатком данного способа является невысокая эффективность пожаротушения.
Наиболее близкой к заявленной автоматической системе пожаротушения является устройство, содержащее блок формирования управляющих сигналов, микропроцессор, панель управления, таймер, электромагнитный клапан, размещенный на магистрали подачи огнетушащего вещества, узел управления электромагнитным клапаном и средства подачи огнетушащего вещества в очаг пожара (см. патент США N 5236049, кл. А 62 С 37/36, 1993).
Недостатком известной системы также является невысокая эффективность пожаротушения.
Целью изобретения является повышение эффективности пожаротушения при использовании способа автоматического пожаротушения, а также автоматической системы для его реализации.
Поставленная цель в части способа достигается тем, что в способе автоматического пожаротушения, заключающемся в установке автоматической системы пожаротушения в состояние ожидания пожарной опасности, определении при возникновении пожарной опасности с помощью расположенных на лафетном стволе автоматической системы пожаротушения средств регистрации координат открытого пламени в выбранной зоне обзора относительно лафетного ствола, подаче огнетушащего вещества в очаг пожара и контроле подачи огнетушащего вещества в очаг пожара, регистрируют в запоминающем устройстве автоматической системы пожаротушения адресный с учетом местоположения очага пожара сигнал пожарной опасности и выбирают из запоминающего устройства системы информацию о зоне обзоре очага пожара с указанием соответствующей траектории сканирования для установления траектории перемещения лафетного ствола в пространстве в случае пожаротушения, а после определения координат открытого пламени определяют координаты зоны подачи огнетушащего вещества при пожаротушении, настраивают режим подачи огнетушащего вещества из насадка лафетного ствола автоматической системы пожаротушения на основе хранящейся в запоминающем устройстве информации о карте режимов функционирования лафетного ствола и координатах очага пожара, при максимально возможной степени совпадения координат очага пожара с координатами защищаемой от пожара зоны выбирают параметры настройки насадка для подачи огнетушащего вещества с учетом конфигурации струи и количества истекающего в единицу времени огнетушащего вещества, а контроль подачи огнетушащего вещества в очаг пожара осуществляют путем слежения за выбранной траекторией перемещения лафетного ствола и параметрами подачи в него огнетушащего вещества с помощью средств измерения давления автоматической системы пожаротушения.
Поставленная цель в части устройства достигается тем, что в автоматической системе пожаротушения, содержащей блок формирования управляющих сигналов, микропроцессор, панель управления, таймер, электромагнитный клапан, размещенный на магистрали подачи огнетушащего вещества, узел управления электромагнитным клапаном и средство подачи огнетушащего вещества в очаг пожара, средство подачи огнетушащего вещества в очаг пожара выполнено в виде управляемого лафетного ствола с насадком, управляемым электродвигателем перемещения, а система снабжена устройством хранения карты режимов пожаротушения, блоком средств сравнения, запоминающим устройством, корректирующим устройством, блоком памяти таблицы тарировки и интерфейсным блоком, преобразователями сигналов управления перемещением по координатной оси Х и координатной оси Y, преобразователем сигналов управления насадком, узлом силового питания, связанным с узлами управления приводом перемещения по оси Х и приводом перемещения по оси Y, с узлом управления насадком и с узлом управления электромагнитным клапаном, фотодатчиком, установленным на лафетном стволе с возможностью регистрации очага пожара, датчиком положения насадка и датчиками положения лафетного ствола относительно координатной оси Х и координатной оси Y, стыковочном узлом, соединяющим магистраль подачи огнетушащего вещества с насадком лафетного ствола, установленного с возможностью изменения своего положения с помощью электродвигателей приводов перемещения по оси Х и оси Y, и блоком измерения давления огнетушащего вещества на входе лафетного ствола, размещенным, например, на стыковочном узле, при этом посредством шин управления и данных микропроцессор соединен с блоком формирования управляющих сигналов, запоминающим устройством, корректирующим устройством, блоком средств сравнения, блоком памяти таблицы тарировки, таймером, устройством хранения карты режимов пожаротушения и интерфейсным блоком, первые входы и выходы которого связаны с панелью управления, выходы фотодатчика, датчика положения насадка, датчиков положения лафетного ствола относительно оси Х и оси Y и блока измерения давления огнетушащего вещества на входе лафетного ствола соединены с вторыми входами интерфейсного блока, вторые выходы которого связаны, соответственно, со вторым входом узла управления электромагнитным клапаном и через преобразователи сигналов управления перемещением по оси Х и оси Y, а также через преобразователь сигналов управления насадком, со вторыми входами узлов управления приводом перемещения по оси Х и приводом перемещения по оси Y, а также узла управления насадком, выход которого соединен со входом электродвигателя перемещения насадка, а выходы узлов управления приводом перемещения по оси Х и приводом перемещения по оси Y связаны со входами электродвигателей приводов перемещения, соответственно, по оси Х и по оси Y.
На чертеже представлена функциональная схема автоматической системы пожаротушения, реализующей предлагаемый способ.
Автоматическая система пожаротушения содержит панель 1 управления, устройство 2 хранения карты режимов пожаротушения, блок 3 средств сравнения, таймер 4, микропроцессор 5, блок 6 запоминающее устройство, корректирующее устройство 7, блок 8 программных средств, интерфейсный блок 9, шину 10 данных.
Панель 1 управления содержит ручной задатчик 11 движения лафетного ствола, автоматический задатчик 12 движения лафетного ствола, ручной задатчик 13 выбора программ, задатчик 14 останова движения лафетного ствола, задатчик 15 пуска системы, задатчик 16 исполнения, средства 17 индикации.
Автоматическая система пожаротушения также содержит шину 18 управления, шину 19 связи с блоком программных средств, блок 20 памяти таблицы тарировки, шины 21-25 связи блоков и устройств с другими шинами. Позициями 26, 27 и 28 обозначены входы блока 9. Позицией 32 обозначен вход блока 9, позицией 33 - шина связи блоков 2,3,4,5,6,7 и 20 с блоком 9. Позиции 35-41 являются входами блока 9, а позициями 30,34, 42-45 обозначены его выходы. Позицией 31 обозначен вход ТРЕВОГА, а позицией 46 обозначен выход ТРЕВОГА интерфейсного блока 9. Система включает в себя блок 47 управления приводами и фотодатчик 48, выходами которого являются входы 39-41 блока 9. Блок 47 содержит узел 49 силового питания, преобразователь 50 сигналов управления перемещением по оси Y, преобразователь 51 сигналов управления перемещением по оси Х, преобразователь 52 сигналов управления насадком, узел 53 управления приводом перемещения по оси Y, узел 54 управления приводом перемещения по оси Х, узел 55 управления насадком и узел 56 управления электромагнитным клапаном. Выходами блока 47 являются выход 57 узла 53, выход 58 узла 54, выход 59 узла 55 управления насадком и выход 60 узла 56 управления электромагнитным клапаном.
Система также включает в себя электродвигатели 61, 62, датчик 63 положения лафетного ствола относительно координат оси Х, датчик 64 положения лафетного ствола относительно координат оси Y, стыковочный узел 65, электромагнитный клапан 666 размещенный на магистрали 67 подачи огнетушащего вещества, электродвигатель 68 настройки насадка, датчик 69 положения настройки насадка 70 и блок 71 измерения давления на входе лафетного ствола, стыковочный узел 72, предназначенный для соединения насадка с лафетным стволом, например, посредством стандартного резьбового соединения.
После включения питания система функционирует следующим образом.
Панель 1 управления позволяет осуществлять настройку автоматической системы пожаротушения на один из режимов работы, а также осуществлять контроль за работой всей системы. При активизации автоматического задатчика 12 движения инициализируется соответствующий выход панели 1 управления. Этот выход связан со входом 27 интерфейсного блока 9, и управляющий сигнал через вход 27 блока 9 транслируется на выход 30 блока 9. Микропроцессор 5 через шину 18 управления воспринимает этот сигнал и под воздействием его через шину 10 данных выводит информацию на средства 17 индикации об установленном режиме. Для этого он формирует сигнал управления и через шину 18 управления подает его на вход 32 интерфейсного блока 9. Под воздействием сигнала управления на входе 32 блок 9 через вход шины 33 считывает информацию с шины 10 данных и передает ее на выход 34 для последующей индикации на средствах 17 индикации об установленном режиме. В качестве средств индикации могут использоваться любые средства визуального отображения, в том числе дисплей на жидких кристаллах. В нашем случае на панели 1 управления высвечивается зеленым свечением индикатор, реализованный на светодиоде. После установления и подтверждения выбранного режима система управления переходит в состояние ОЖИДАНИЕ с постоянным контролем входа 31 блока 9. При появлении на входе 31 блока 9 сигнала тревоги, поступающего по линии от датчиков пожарной сигнализации, интерфейсный блок 9 формирует сигнал управления на выходе 30 и выводит информацию о тревоге на выход 33 (вход шины 10 данных) для дальнейшего считывания ее шиной 10 данных. Сигнал управления через шину 18 управления активизирует микропроцессор на чтение шины 10 данных. Данная информация содержит зональный адрес пожара. В соответствии с адресной информацией о наличии пожара микропроцессор 5 выбирает программу поиска очага пожара из блока 8 и координаты зоны сканирования из памяти блока 6. Микропроцессор 5 шаг за шагом считывает координаты траектории из памяти блока 6 посредством шины 10 данных и, преобразовав их в командное слово, выводит их через шину 10 данных в интерфейсный блок 9. Интерфейсный блок 9 в соответствии с сигналом управления, поступающим от микропроцессора 5 на вход 32, принимает на вход шины 33 командное слово с шины 10 данных и коммутирует его на один из выходов 42, 43, 44,45, являющихся одноименными входами блока 47 управления приводами: 45 - вход в канал формирования сигналов управления в вертикальной плоскости; 44 - вход в канал формирования сигналов управления в горизонтальной плоскости; 42 - вход в канал формирования сигналов управления насадком; 43 - вход в канал формирования сигналов управления электромагнитным клапаном. Поиск очага пожара в активной адресной зоне производится при первоначальном движении ствола в горизонтальной плоскости до момента появления на любом из выходов фотодатчика 48, являющихся входами 39-41 интерфейсного блока 9, информационного сигнала. Движение ствола в горизонтальной плоскости осуществляется под воздействием мощных управляющих сигналов, сформированных на выходе 58 блока 47 управления приводом. Сигналы управления стволом поступают на электродвигатель 61, приводя его во вращение. Это вращение через передаточный механизм (в данном случае двухступенчатый редуктор, реализация которого очевидна, и поэтому его иллюстрация не приводится на фигуре) задает движение ствола в горизонтальной плоскости. Фотодатчик 48, расположенный на стволе и оптическая ось которого совпадает с направлением истекающего огнетушащего вещества из насадка 70, формирует на любом из трех своих выходов сигнал только при наличии в зоне обзора фотодатчика открытого пламени. Сигнал, присутствующий на любом из входов 39-41 блока 9, транслируется на шину 10 данных. Одновременно с этим блоком 9 генерирует сигнал управления на выход 30. По этому сигналу микропроцессор 5 считывает информацию с шины 10 и формирует команду для изменения алгоритма поиска пожара. Эта информация выводится через шину 18 управления на шину 19 связи блока 8 программных средств. Последовательно с этим микропроцессор 5 формирует и через шину 18 управления подает на вход 32 блока 9 управляющий сигнал, вынуждающий этот блок транслировать информацию со входа 38 на выход шины 33. Информационный сигнал о положении ствола от датчика 63 транслируется на шину 10 данных с одновременным формированием управляющего сигнала на выходе 30 блока 9. По этому сигналу микропроцессор 5 считывает с шины 10 данных информацию, являющейся одной из относительных координат очага пожара в горизонтальной плоскости, и заносит ее в память блока 6, а также формирует управляющий сигнал на шине 19 связи для блока 8. В соответствии с сигналом, присутствующим на шине, блок 8 устанавливает выполнение части программы и определяет движение ствола в горизонтальной плоскости с целью получения второй координаты очага пожара в горизонтальной плоскости. Микропроцессор 5 через шину 10 данных считывает из памяти блока 6 координаты точек движения ствола и в виде управляющего слова через шину данных передает параметры движения в блок 9. Интерфейсный блок 9, расшифровав управляющее слово, выводит параметры движения на выход 44, который является входом канала формирования сигналов управления в горизонтальной плоскости и подключен к узлу 51 преобразования сигналов управления перемещением по оси Х. Этот узел преобразует параметры движения в электрические сигналы, которые передаются на узел 54 управления приводом перемещения по оси Х. Узел 54 вместе с узлом 49 силового питания преобразуют свои электрические сигналы в мощные токовые сигналы, позволяющие управлять вращением электродвигателя 61. Вращение электродвигателя 61 и, соответственно, движение ствола будет происходить до тех пор, пока на выходе фотодатчика 48 и, соответственно, на входах 39-41 блока 9 не будет отсутствовать сигнал. Блок 9 при отсутствии сигналов на входах 39-41 генерирует управляющий сигнал на выходе 30, и микропроцессор 5 посредством шины 10 данных и интерфейсного блока 9 считывает информацию с датчика 63 и заносит ее в память блока 6. Эта информация является данными об относительной координате очага пожара в горизонтальной плоскости.
Как только завершен поиск координат очага пожара в горизонтальной плоскости, микропроцессор 5 под управлением программы, хранимой в блоке 8, переходят к поиску двух координат очага пожара в вертикальной плоскости. Микропроцессор 5 с целью целенаправленного выбора из памяти набора точек траектории перемещения ствола в вертикальной плоскости, позволяющей оптимизировать временные характеристики поиска координаты очага пожара, анализирует сигналы на выходах 39,40 фотодатчика 48. Для этого микропроцессор 5 генерирует управляющий сигнал и через шину управления подает его на вход 32 блока 9 с целью активизации входов 39,40 блока 9. Блок 9 последовательно транслирует эти сигналы на шину 10 данных. Микропроцессор 5 считывает информацию с шины данных и совместно со средствами сравнения блока 3 определяет знак параметра движения. Затем микропроцессор 5 считывает из памяти параметры точек движения перемещения ствола в вертикальной плоскости (верх/низ), и управляющее слово выводится на шину 10 данных с одновременной выдачей сигнала управления на вход 32 блока 9. Интерфейсный блок 9 с шины 10 данных (вход шины 33) транслирует управляющее слово на выход 45 - в канал формирования сигналов управления в вертикальной плоскости. Сформированный мощный сигнал с выхода 57 блока 47 поступает на электродвигатель 62 и вызывает его вращение в требуемую сторону. Вращение электродвигателя через передаточное звено приводит в движение лафетный ствол до тех пор, пока на выходе 41 фотодатчика 48 не будет зафиксировано изменение его состояния. Переход состояния выхода 41, заключающийся в наличии-отсутствии / отсутствии-наличии сигнала определяет две относительные координаты очага пожара в вертикальной плоскости. Микропроцессор 5 отслеживает состояние входа 41 блока 9. Как только микропроцессор 5 фиксирует изменение состояния, он генерирует сигнал управления и через шину управления подает его на вход 32 блока 9 с целью создания тракта передачи информации между датчиком 64 и шиной 10 данных. Информация об относительной координате передается на вход 37 блока 9 с последующей трансляцией на выход шины 33. Данную информацию микропроцессор 5 считывает с шины данных и записывает ее в память блока 6. Приведенным выше образом происходит формирование координат очага пожара в горизонтальной и вертикальной плоскостях. При этом микропроцессор 5 в соответствии с установленным режимом в блоке 8 считывает координаты очага пожара из памяти блока 6 и под воздействием управляющих сигналов с шины 21 устройства 7 вводит поправки на формирование координат рабочей траектории, учитывающих площадь зоны орошения. Затем микропроцессор 5 регистрирует эти координаты траектории в рабочую область памяти блока 6. После окончания формирования рабочей траектории движения ствола производится настройка насадка 70 лафетного ствола для формирования огнетушащей струи и интенсивности подачи огнетушащего вещества. Настройка производится на основе карты режимов, создаваемой на этапе проектной привязки данной системы к защищаемому объекту. Для этого микропроцессор 5 из памяти блока 6 извлекает информацию о координатах очага пожара и данную информацию с шины данных заносит в средства сравнения блока 3. Затем микропроцессор 5 последовательно извлекает из устройства 2 хранения карты режимов пожаротушения условные координаты размещения защищаемого оборудования либо конструкций и по шине данных заносит их в средства сравнения блока 3. Средства сравнения последовательно сопоставляют координаты очага пожара с координатами карты режимов. При достижении максимального сопоставления координат очага пожара и координат карты режимов средства сравнения блока 3 генерируют на выходе шины 23 связи сигнал управления. Микропроцессор 5 в соответствии с этим сигналом считывает на шину 10 данных из устройства 2 соответствующие коды настройки насадка 70. Данные коды настройки с шины данных через вход шины 33 связи блока 9 транслируются на выход 42 блока 9 и одноименный вход блока 47 управления приводами. Здесь канал формирования сигналов управления насадком (блоки 5", 55 и 49) формирует мощный сигнал управления электродвигатель 68 и заставляет вал электродвигателя вращаться.Данное вращение приводит в движение механический узел, изменяющий проходное сечение насадка (на фигуре не показано). Команды управления формируются микропроцессором 5 до тех пор, пока сигнал с датчика 69, поступающий на вход 35 блока 9, будет равным соответствующим параметрам настройки, хранимым в устройстве 2.
Перед началом отработки рабочей траектории ствола для процесса тушения микропроцессор 5 формирует команду управления на открытие электромагнитного клапана 66. Когда на шине 23 связи средств сравнения блока 3 появляется управляющий сигнал, свидетельствующий об осуществлении настройки насадка 70, микропроцессор 5 формирует управляющий сигнал на открытие электромагнитного клапана 66 и сигнал запуска таймера 4. Сигнал управления открытием электромагнитного клапана 66 через вход шины 33 блока 9, выход 43 поступает на одноименный вход блока 47. Усиленный сигнал с выхода 64 блока 47 поступает на контакт электромагнитного клапана 66. Под воздействием мощного сигнала электромагнитный клапан 66 открывается, и огнетушащее вещество из пожарной магистрали через стыковочный узел 65, представляющий собой разъемное механическое соединение, например фланцевое, попадает в полость лафетного ствола и под давлением выбрасывается из насадка 70. Сформированный насадком поток огнетушащего вещества подается с очаг пожара, орошая его по сформированной рабочей траектории, параметры которой хранятся в памяти блока 6. При этом микропроцессор 5 последовательно формирует команды управления, поступающие затем на соответствующие электродвигатели 61 и 62.
Контроль за подачей огнетушащего вещества осуществляется по параметрам блока 71 измерения давления, например электрического манометра, который подключается на входе лафетного ствола любым известным способом. Информационный сигнал с блока 71 поступает на вход 36 интерфейсного блока 9 и под управлением микропроцессора 5 с шины 10 данных вводится в средства сравнения блока 3 для измерения уровня этого сигнала. Измерение может проводиться любым известным способом. В данном случае проводится измерение методом сравнения с эталонным значением из таблицы тарировки, хранимой в памяти. Если диапазон измеренного давления не соответствует установочным параметрам для защищаемого объекта, то микропроцессор 5 в результате этого рассогласования формирует информационный сигнал и по шине 10 данных через вход шины 33 блока 9 выводит на выход (линию) 46 ТРЕВОГА, а также на выход 37 блока 9 и на средства 17 индикации панели 1, зажигая при этом транспорант (светодиод) ОТКЛОНЕНИЕ ОТ НОРМЫ. Процесс тушения сопровождается выдачей сигнала ТРЕВОГА. Для этого микропроцессор 5 с определенной периодичностью формирует сигнал и через шину 10 данных выводит его в блок 9 на выход 46, например контакт подключения телефонной линии. Процесс подачи огнетушащего вещества прекращается после отработки заданного времени таймером 4. По истечении установленного времени таймер формирует управляющий сигнал и выводит его на шину 24 связи. Микропроцессор 5 по этому сигналу формирует команду на закрытие электромагнитного клапана 66. В этом процессе участвуют те же самые цепи, что при открытии электромагнитного клапана 66. Контроль выполнения команды осуществляется по измерению сигнала на входе 36 блока 9. Как только сигнал достигнет нулевого уровня, микропроцессор 5 формирует команду ОСТАНОВ, что равносильно приведению системы в исходное состояние.
Прекращение процесса тушения может быть осуществлено ручным способом с панели 1 управления. При этом команда ОСТАНОВ задается с помощью задатчика 14 останова.
Кроме автоматического режима, описанного выше, в настоящей системе реализован режим управления стволом вручную при помощи команды с панели 1 управления. В первом случае можно с помощью ручного задатчика 13 выбора программ выбрать траекторию движения ствола, которая хранится в памяти блока 6. Остальные команды в данном режиме система управления формирует автоматически. Во втором случае команды управления стволом формируются вручную с помощью ручного задатчика 11 движения с панели 1 управления, и при необходимости все команды управления стволом могут быть повторены автоматически (режим оперативного обучения).
Рассмотрим первый случай. С помощью ручного задатчика 13 выбора программ инициируется выбор одной любым возможным способом. В данных случаях это достигается нажатием адресной кнопки. На выходе ручного задатчика 13 (входе 28 блока 9) формируется сигнал, который воспринимается интерфейсным блоком 9 и затем выводится на шину 10 данных. Одновременно блок 9 формирует на выходе 30 управляющий сигнал, в соответствии с которым микропроцессор 5 считывает с шины данных адресную информацию по выполняемой программе. В соответствии с адресной информацией микропроцессор 5 последовательно считывает из памяти блока 6 коды настройки насадка и параметры рабочей траектории. Данные коды настройки с шины данных заносятся в средства сравнения блока 3, а также через вход шины 33 блока 9 транслируются на выход 42 блока 9 и одноименный вход блока 47 управления приводами. В этом случае в канале формирования сигналов управления насадком (узлы 49, 52, 55) формируется мощный сигнал управления соответствующим электродвигателем 68. Сигнал с выхода 59 поступает на электродвигатель 68, приводят во вращение его вал. При этом в движение приводится механический узел, поступательное движение которого изменяет проходное сечение насадка (на фигуре не показано).
Команды управления формируются микропроцессором 5 до тех пор, пока сигнал с датчика 69, поступающий на вход 35 блока 9 и далее на средства сравнения, не будет равным соответствующим параметрам настройки, хранимым в памяти. При достижении соответствия параметров настройки насадка средства сравнения формируют сигнал на выходе 23. Микропроцессор 5 в соответствии с этим сигналом формирует команду на открытие электромагнитного клапана 66. Сигнал управления открытием электромагнитного клапана 66 через вход шины 33 связи блока 9, выход 43 поступает на одноименный вход блока 47. Усиленный сигнал с выхода 60 блока 47 поступает на контакт электромагнитного клапана 66. Под воздействием мощного сигнала электромагнитный клапан 66 открывается, и огнетушащее вещество из пожарной магистрали 67 через стыковочный узел 65 попадает в полость лафетного ствола и под давлением выбрасывается из насадка 70.
В соответствии с адресной информацией микропроцессор 5 шаг за шагом считывает координаты рабочей траектории из памяти блока 6 посредством шины 10 данных и, преобразовав их в командное слово, выводит их через шину 10 данных в интерфейсный блок 9. Интерфейсный блок 9 в соответствии с сигналом управления, поступающим от микропроцессора по шине 18 управления на вход 32 интерфейсного блока 9, принимает командное слово с шины 10 данных на вход шины 33 связи и коммутирует его на один из выходов 44, 45, являющихся одноименными входами блока 47 управления приводами. В первоначальный момент времени выводится информация и подается на вход 44 блока 47, который является входом канала формирования сигналов управления в горизонтальной плоскости и подключен к преобразователю 51 сигналов управления по оси Х. Узел 51 преобразует параметры движения в сигналы, которые поступают в узел 54 управления приводом перемещения по оси Х. Узел 54 вместе с узлом 49 силового питания преобразуют текущие сигналы в мощные токовые сигналы управления вращением электродвигателя 61. Вращение электродвигателя 61 приводит в движение редуктор, на выходном валу которого размещен датчик 63. Микропроцессор 5 посредством шины 10 данных и интерфейсного блока 9 считывает информацию с датчика 63 и заносит данную информацию в средства сравнения блока 3. Затем микропроцессор 5 последовательно извлекает из памяти блока 6 координаты точек траектории движения ствола в горизонтальной плоскости и по шине данных заносит их в средства сравнения блока 3. Средства сравнения последовательно сопоставляют измеренную информацию с датчика 63 с координатами точек траектории. При достижении сопоставления средства сравнения блока 3 генерируют на выходе 23 сигнал управления. Микропроцессор 5 в соответствии с этим сигналом считывает на шину 10 данных из памяти блока 6 соответствующие координаты точек движения ствола в вертикальной плоскости, а через вход шины 33 блока 9 они транслируются на выход 45 блока 9 и одноименный вход блока 47 управления приводами. Здесь канал формирования сигналов управления в вертикальной плоскости (50, 53, 49) формирует мощный сигнал управления электродвигателем 62. Сигнал с выхода 57 подается на электродвигатель 62. При этом вращается вал электродвигателя. Данное вращение приводит в движение механический узел-редуктор, на выходном валу которого установлен датчик 64. Микропроцессор 5 посредством шины 10 данных и интерфейсного блока 9 считывает информацию с датчика 64 и заносит данную информацию в средства сравнения блока 3. Затем микропроцессор 5 последовательно извлекает из памяти блока 6 координаты точек траектории движения ствола в вертикальной плоскости и по шине данных заносит их в средства сравнения блока 3. Средства сравнения последовательно сопоставляют измеренную информацию с датчика 64 с координатами точек траектории. При достижении сопоставления средств сравнения блока 3 генерируют на выходе 23 сигнал управления. Микропроцессор 5 в соответствии с этим сигналом считывает на шину 10 данных из памяти блока 6 соответствующие координаты точек движения ствола в горизонтальной плоскости, и через вход шины 33 блока 9 эти параметры транслируются на выход 44 блока 9 и одноименный вход блока 47 управления приводами. Таким образом происходит отработка полной траектории движения ствола в соответствии с выбором программы на панели 1 управления. Отработка траектории с одновременной подачей огнетушащего вещества в ствол производится до тех пор, пока с пульта управления не будет задана команда ОСТАНОВ с помощью ручного задатчика 14 останова.
Управление стволом вручную с помощью ручного задатчика 11 движения с панели 1 управления заключается в следующем. Перемещение ствола в двух взаимно перпендикулярных плоскостях осуществляется выбором направления: вверх/вниз; влево/вправо с помощью ручного задатчика 11 движения. В данном случае в качестве ручного задатчика выступают четыре кнопки: верх, низ, вправо, влево. Нажатие этих кнопок и их удержание определяет движение ствола. Например, нажатие и удержание кнопки ВЕРХ в нажатом состоянии определяет формирование кодовой посылки на выходе ручного задатчика 11 движения и на входе 26 блока 9. Данную кодовую посылку интерфейсный блок 9 транслирует на выход шины 33 связи и на шину данных, а сигнал управления - на выход 30. В соответствии с сигналом управления микропроцессор 5 считывает с шины данных кодовую посылку и формирует управляющую команду - движение по вертикали вверх. Эта команда выводится на шину данных. Одновременно микропроцессор 5 формирует управляющий сигнал и выводит его выход 32. Под воздействием этого сигнала управления интерфейсный блок транслирует командную информацию с шины данных (вход шины 33) на выход 45. Этот выход является входом в канал формирования сигналов управления в вертикальной плоскости (49, 50, 53). При этом канал формирует мощный сигнал управления электродвигателем 62. Сигнал с выхода 57 подается на электродвигатель 62. Вал электродвигателя под воздействием этого сигнала вращается. Данное вращение приводит в движение механический узел-редуктор, на выходном валу которого установлен датчик 64. Микропроцессор 5 посредством шины 10 данных и интерфейсного блока 9 считывает информацию с датчика 64 и заносит данную информацию в память блока 6. Затем микропроцессор 5 последовательно формирует командную информацию на движение до тех пор, пока будет нажата кнопка ВЕРХ. Аналогично протекает процесс управления при нажатии остальных кнопок. Команда на открытие электромагнитного клапана 66 формируется вручную с помощью задатчика 15 пуск (нажатие кнопки), в соответствии с которой микропроцессор 5 формирует команду на открытие электромагнитного клапана 66. Сигнал управления открытием электромагнитного клапана через вход шины 33 связи блока 9, выход 43 поступает на одноименный вход блока 47. Усиленный сигнал с выхода 60 блока 47 поступает на контакт электромагнитного клапана 66. Под воздействием мощного сигнала электромагнитный клапан 66 открывается, и огнетушащее вещество из пожарной магистрали 67 через стыковочный узел 65 попадает в полость лафетного ствола и затем под давлением через стыковочный узел 72 выбрасывается из насадка 70. В результате управления в памяти блока 6 сохраняются параметры точек траектории. В случае необходимости эта траектория может быть повторена неограниченное число раз, реализуя принцип оперативного обучения методом проводки. Для этого достаточно сформировать команду с помощью выбора задатчика 16 в составе пульта 1 управления (в данном случае простейшим нажатием на кнопку исполнение). Этот режим реализуется аналогичным образом, что и в режиме выбора программ.
Использование изобретения повышает эффективность пожаротушения.
Изобретение относится к автоматическим средствам пожаротушения и может быть использовано для тушения пожаров. Способ заключается в установке автоматической системы пожаротушения в состояние ожидания пожарной опасности, определении при пожаре с помощью расположенных на лафетном стволе системы средств регистрации (фотодатчика) координат открытого пламени в зоне обзора, при этом в запоминающем устройстве системы регистрируют адресный сигнал пожарной опасности, а из него выбирают информацию о зоне обзора с указанием траектории сканирования для установления траектории перемещения лафетного ствола, после определяют координаты зоны подачи огнетушащего вещества. На основе информации о карте режимов пожаротушения, хранящейся в запоминающем устройстве, настраивают режим подачи огнетушащего вещества, выбирают параметры настройки насадка лафетного ствола для подачи огнетушащего вещества в очаг пожара, а контроль подачи огнетушащего вещества осуществляют путем слежения за выбранной траекторией перемещения лафетного ствола и параметрами подачи огнетушащего вещества с помощью блока измерения давления огнетушащего вещества на входе лафетного ствола. Микропроцессор автоматической системы пожаротушения посредством шин управления и данных соединен с блоком формирования управляющих сигналов, запоминающим устройством, корректирующим устройством, блоком средств сравнения, блоком памяти таблицы тарировки, таймером, устройством хранения карты режимов пожаротушения и интерфейсным блоком, первые входы и выходы которого связаны с панелью управления, выходы фотодатчика, датчика положения насадка, датчиков положения лафетного ствола относительно координатных осей Х и Y и блока измерения давления соединены со вторыми входами интерфейсного блока,вторые выходы которого связаны, соответственно, со вторым входом узла управления электромагнитным клапаном и через преобразователи сигналов управления перемещением по осям Х и Y, а также через преобразователь сигналов управления насадком, со вторыми входами узлов управления приводами перемещения по оси Х и оси Y, а также узла управления насадком, выход которого соединен со входом электродвигателя перемещения насадка, а выходы узлов управления приводами перемещения лафетного ствола связаны, соответственно, со входами электродвигателей приводов его перемещения. Повышается эффективность пожаротушения, осуществляется гибкая схема противопожарной защиты. Создан макетный образец, работоспособность которого подтверждает обоснованность выбранных решений. 2 с.п.ф-лы, 1 ил.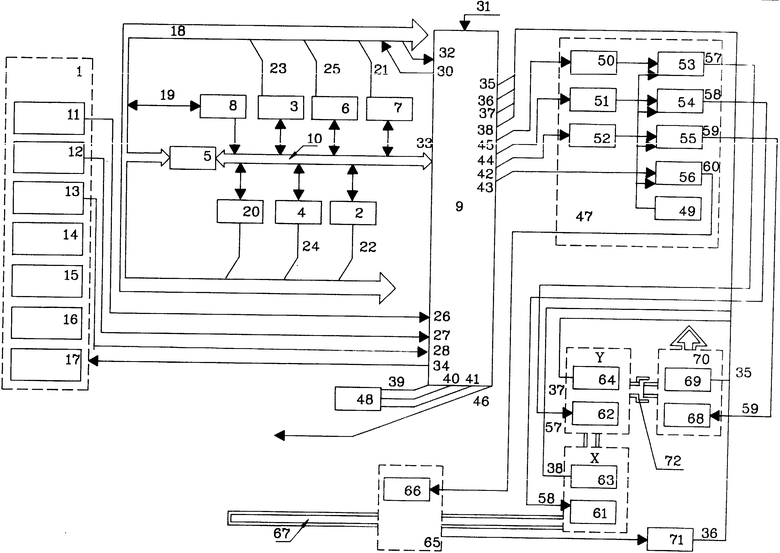
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2046613, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 5236049, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
