Изобретения относятся к автоматическим средствам пожаротушения, а именно к техническим средствам управления устройствами подачи огнетушащего вещества на основе определения пространственных координат области возгорания, и могут быть использованы для тушения пожаров, в том числе на открытых территориях при наличии ветра.
Известны способ автоматического пожаротушения и автоматическая система для его реализации, RU 2046613 С1, опубл. 27.10.1995.
Способ автоматического пожаротушения включает обнаружение источника возгорания на контролируемой территории с помощью средств обнаружения, определение координат области возгорания, подачу и распыление струи огнетушащего вещества из лафетных стволов в направлении источника возгорания с одновременным возвратно-поступательным перемещением струи в двух взаимно перпендикулярных направлениях, при этом направление подачи и амплитуду возвратно-поступательного перемещения струи регулируют в зависимости от координат области возгорания, причем координаты области возгорания вычисляют на плоскости, в виде прямоугольной зоны, совпадающей с местоположением источника возгорания, в границах которой будет осуществляться пожаротушение.
Автоматическая система для осуществления способа содержит средства пожаротушения в виде, по меньшей мере, одного лафетного ствола для распыления струи огнетушащего вещества, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях, приводные двигатели для перемещения лафетного ствола в первом и втором направлениях, датчики перемещения лафетного ствола, блок определения амплитуды возвратно-поступательного перемещения лафетного ствола в функции координат источника возгорания, средство подачи огнетушащего вещества в лафетный ствол, средство обнаружения пламени в виде оптико-электрического датчика, пропускающего излучение в инфракрасном диапазоне, средство наведения огнетушащей среды в виде оптико-электрического датчика цели, жестко установленного на лафетном стволе, блок управления, выходы которого связаны с приводными двигателями и со входом управления средств подачи огнетушащего вещества в лафетный ствол, при этом входы блока управления связаны с выходами датчиков обнаружения пламени, датчика цели и датчиков перемещения ствола в первом и втором направлениях.
Недостатком описанных способа и системы является невысокая эффективность пожаротушения ввиду низкой прицельности подачи огнетушащего вещества на обнаруженную область возгорания, обусловленную следующими факторами:
- координаты области возгорания вычисляют на плоскости, в виде прямоугольной зоны, совпадающей с местоположением источника возгорания, в границах которой будет осуществляться пожаротушение, что не позволяет достоверно оценить масштабы области возгорания в трех измерениях;
- отсутствует контроль попадания струи огнетушащего вещества на обнаруженную область возгорания;
- отсутствует компенсация влияния на реальную траекторию струи поля гравитации;
- отсутствует компенсация влияния на реальную траекторию струи наличия ветра, что обусловливает невозможность использования для тушения пожаров на открытых территориях при наличии ветра.
Известны способ автоматического пожаротушения и автоматическая система для его осуществления, RU 2411974 С1, опубл. 20.02.2011.
Способ автоматического пожаротушения включает обнаружение источника возгорания на контролируемой территории с помощью средств обнаружения, определение координат области возгорания, подачу и распыление струи огнетушащего вещества из лафетных стволов в направлении источника возгорания с возможностью регулирования направления подачи и амплитуды возвратно-поступательного перемещения струи в зависимости от координат области возгорания, при этом в качестве средств обнаружения используют инфракрасные каналы, по меньшей мере, двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, и размещенных в пределах контролируемой территории произвольно по отношению к лафетным стволам, причем координаты области возгорания вычисляют в виде пространственных координат в зависимости от координат расположения телевизионных камер, а углы разворота лафетных стволов вычисляют в зависимости от их расстояния до границ области возгорания с учетом сил гравитации; преимущественно, определяют лафетный ствол, ближайший к источнику возгорания, и подачу и распыление струи огнетушащего вещества осуществляют из ближайшего лафетного ствола; контроль попадания струи огнетушащего вещества на обнаруженную область возгорания осуществляется оператором с помощью видеоканалов телевизионных камер.
Автоматическая система для осуществления способа содержит средства пожаротушения в виде, по меньшей мере, одного лафетного ствола для распыления струи огнетушащего вещества, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях, приводные двигатели для перемещения лафетных стволов в первом и втором направлениях, средство подачи огнетушащего вещества в лафетные стволы, блок определения амплитуды возвратно-поступательного перемещения лафетного ствола в функции координат источника возгорания, устройство обнаружения пламени в виде инфракрасных каналов, по меньшей мере, двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, и размещенных в пределах контролируемой территории произвольно по отношению к лафетным стволам, устройство обработки и управления, выполненное на базе процессора с возможностью вычисления координат области возгорания в виде пространственных координат в зависимости от координат расположения телевизионных камер, вычисления расстояния от источника возгорания до ближайшего лафетного ствола и вычисления углов разворота лафетных стволов в зависимости от их расстояния до границ области возгорания с учетом сил гравитации; устройство обработки и управления включает последовательно соединенные блок видеозахвата, процессор и блок расширения портов ввода-вывода, выходы которого через контроллеры связаны с приводными двигателями перемещения лафетных стволов и со входом управления средств подачи огнетушащего вещества в лафетные стволы, а вход устройства обработки и управления соединен с выходами инфракрасных каналов телевизионных камер.
Описанные способ и устройство приняты в качестве прототипа настоящего изобретения в части способа и устройства.
Недостатком прототипа является невысокая эффективность пожаротушения на открытых территориях при наличии ветра, ввиду:
- отсутствия автоматического контроля попадания струи огнетушащего вещества на обнаруженную область возгорания, так как контроль осуществляется оператором с помощью видеоканалов телевизионных камер;
- отсутствия компенсация влияния на реальную траекторию струи наличия ветра. Поскольку струя огнетушащего вещества обладает малой плотностью, при наличии ветра она отклоняется от расчетной траектории и не может достичь области возгорания с той точностью, которая определяется позиционированием лафетного ствола. Таким образом, условием эффективности пожаротушения прототипа является неподвижный воздух или безветренная погода, что обусловливает невозможность использования для тушения пожаров на открытых территориях при наличии ветра.
Задачей настоящего изобретения является повышение эффективности пожаротушения на открытых территориях при наличии ветра при эффективном расходовании огнетушащего вещества за счет:
- обеспечения возможности непрерывного автоматического контроля попадания струи огнетушащего вещества на область возгорания;
- компенсации влияния на реальную траекторию струи наличия ветра за счет автоматической коррекции направления струи огнетушащего вещества путем формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра.
Поставленная задача в части способа решается за счет того, что в способе автоматического пожаротушения, включающем обнаружение источника возгорания на контролируемой территории с помощью средств обнаружения, определение координат области возгорания, подачу и распыление струи огнетушащего вещества из лафетных стволов в направлении источника возгорания с возможностью регулирования направления подачи струи в зависимости от координат области возгорания, при этом в качестве средств обнаружения используют инфракрасные каналы, по меньшей мере, двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, и размещенных в пределах контролируемой территории произвольно по отношению к лафетным стволам, причем координаты области возгорания вычисляют в виде пространственных координат в зависимости от координат расположения телевизионных камер, а углы разворота лафетных стволов вычисляют в зависимости от их расстояния до границ области возгорания с учетом сил гравитации, согласно изобретению, осуществляют контроль попадания струи огнетушащего вещества в область возгорания путем выделения контура струи с помощью видеоканала телевизионной камеры по признакам цвета и движения, сопоставления его с областью возгорания и формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра.
Предпочтительно определяют лафетный ствол, ближайший к источнику возгорания, и подачу и распыление струи огнетушащего вещества осуществляют из ближайшего лафетного ствола.
Поставленная задача в части системы решается за счет того, что в автоматической системе пожаротушения, содержащей средства пожаротушения в виде, по меньшей мере, одного лафетного ствола для распыления струи огнетушащего вещества, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях, контроллеры, связанные с приводными двигателями для перемещения лафетных стволов в первом и втором направлениях, средство подачи огнетушащего вещества в лафетные стволы, устройство обнаружения пламени в виде инфракрасных каналов, по меньшей мере, двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, и размещенных в пределах контролируемой территории произвольно по отношению к лафетным стволам, устройство обработки и управления, выполненное на базе процессора с возможностью вычисления координат области возгорания в виде пространственных координат в зависимости от координат расположения телевизионных камер и вычисления углов разворота лафетных стволов в зависимости от их расстояния до границ области возгорания с учетом сил гравитации, при этом выходы устройства обработки и управления через контроллеры связаны с приводными двигателями перемещения лафетных стволов и со входом управления средств подачи огнетушащего вещества в лафетные стволы, а входы устройства обработки и управления соединены с выходами инфракрасных каналов телевизионных камер, согласно изобретению, устройство обработки и управления снабжено устройством обработки контура струи огнетушащего вещества, выполненного с возможностью формирования двух сигналов ошибки попадания струи в область возгорания по величине и по направлению в зависимости от направления и скорости ветра, и устройством формирования сигналов коррекции угла, на который необходимо поднять лафетный ствол по вертикали, угла разворота лафетного ствола по горизонтали, а также для выбора лафетного ствола, который необходимо задействовать для обработки обнаруженного источника возгорания, причем устройство обработки контура струи огнетушащего вещества и устройство формирования сигналов коррекции соединены двунаправленной связью со входом/выходом процессора устройства обработки и управления.
Предпочтительно устройство обработки и управления включает последовательно соединенные блок видеозахвата, процессор и блок расширения портов ввода-вывода, выходы которого являются выходами устройства обработки и управления, входами которого являются входы блока видеозахвата, при этом устройство обработки и управления выполнено с возможностью вычисления расстояния от источника возгорания до ближайшего лафетного ствола. Телевизионные камеры могут быть расположены на высоте, гарантирующей визуальный контакт со всеми пожароопасными объектами на контролируемой территории.
Заявителем не выявлены какие-либо технические решения, идентичные заявленному, что позволяет сделать вывод о соответствии изобретения условию патентоспособности «Новизна».
Благодаря реализации совокупности ограничительных и отличительных признаков изобретения достигается новый технический результат - обеспечение возможности непрерывного автоматического контроля попадания струи огнетушащего вещества на область возгорания и компенсация влияния на реальную траекторию струи наличия ветра за счет автоматической коррекции направления струи огнетушащего вещества путем формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра, благодаря чему повышается эффективность пожаротушения на открытых территориях при наличии ветра при эффективном расходовании огнетушащего вещества.
Возможность непрерывного автоматического контроля попадания струи огнетушащего вещества на область возгорания обусловлена обеспечением возможности выделения контура струи с помощью видеоканала телевизионной камеры по признакам цвета и движения, сопоставления контура с областью возгорания, определенной с помощью инфракрасного канала телевизионной камеры, и формирования двух сигналов ошибки попадания струи на область возгорания по величине и по направлению в зависимости от направления и скорости ветра.
Компенсация влияния ветра на реальную траекторию струи обеспечена за счет автоматической коррекции направления струи огнетушащего вещества путем формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от сформированных сигналов ошибки попадания струи на область возгорания, зависящих от направления и скорости ветра.
Заявителем не выявлены источники информации, в которых содержались бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. Указанные обстоятельства позволяют сделать вывод о соответствии заявленного технического решения условию патентоспособности «Изобретательский уровень».
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг. 1 - блок- схема автоматической системы пожаротушения;
на фиг. 2а - иллюстрация выявления области возгорания;
на фиг. 2б - иллюстрация выделения контура струи огнетушащего вещества без наличия ветра и сопоставления контура с областью возгорания;
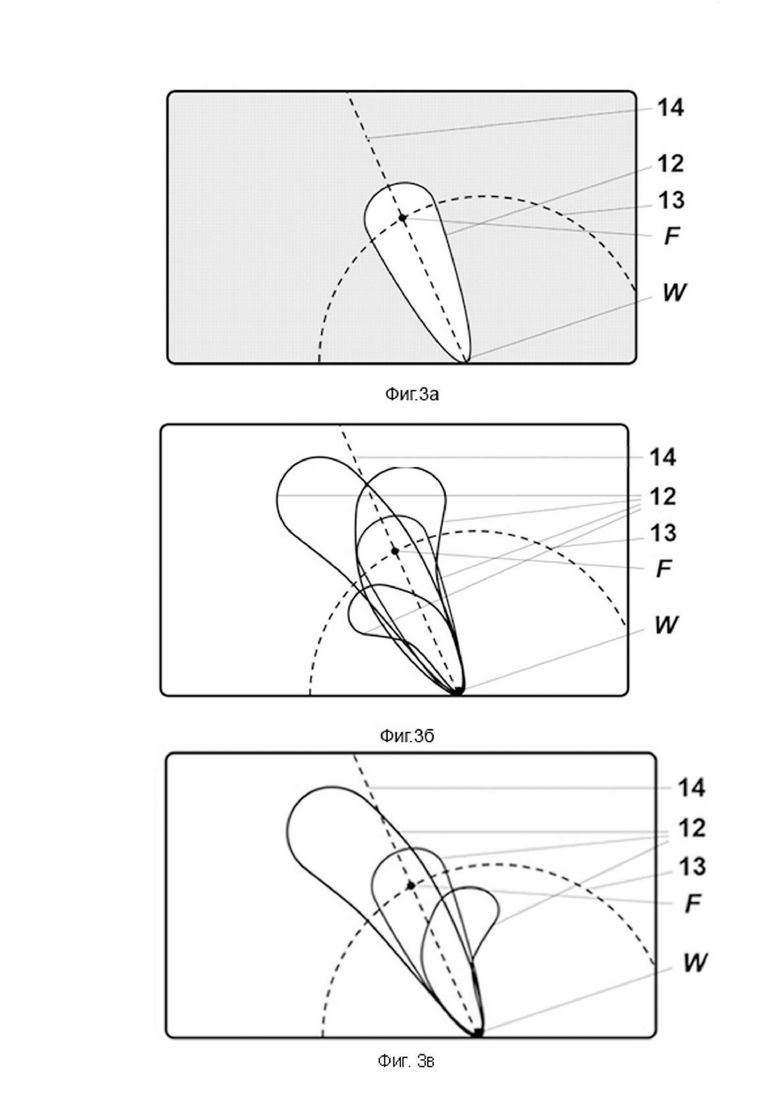
на фиг. 3а - иллюстрация процесса попадания струи на область возгорания без ветра;
на фиг. 3б - иллюстрация реального процесса отклонения струи при наличии ветра;
на Фиг. 3в - иллюстрация формирования сигнала ошибки попадания струи на область возгорания в зависимости от соотношения, в котором линии 13 и 14 разделяют площадь контура струи (показаны 3 варианта).
Способ автоматического пожаротушения состоит в следующем:
- обнаруживают возникновение пожара на контролируемой территории с помощью средств обнаружения, в качестве которых используют инфракрасные каналы, по меньшей мере, двух двухканальных телевизионных камер;
- по информации от инфракрасных каналов телевизионных камер определяют координаты области возгорания, которые вычисляют в виде пространственных координат в зависимости от координат расположения телевизионных камер;
- регулируют направление подачи струи огнетушащего вещества в зависимости от координат области возгорания с учетом сил гравитации; углы разворота лафетных стволов вычисляют в зависимости от их расстояния до границ области возгорания с учетом сил гравитации;
- подают в лафетный ствол огнетушащее вещество и распыляют его, формируя струю в направлении источника возгорания;
- осуществляют контроль попадания струи огнетушащего вещества на область возгорания путем выделения контура струи с помощью видеоканала телевизионной камеры по признакам цвета и движения и сопоставления его с областью возгорания;
- формируют два сигнала ошибки попадания струи на область возгорания по величине и по направлению, возникающей при наличии ветра;
- с учетом сигналов ошибки формируют сигналы коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра;
- преимущественно, определяют лафетный ствол, ближайший к источнику возгорания, и подачу и распыление струи огнетушащего вещества осуществляют из ближайшего лафетного ствола.
Автоматическая система для осуществления способа содержит n двухканальных телевизионных камер 1.1 - 1.n, включающих инфракрасный канал и видеоканал, устройство 2 обработки и управления, средства пожаротушения в виде m лафетных стволов 8.1 - 8.m для распыления струи огнетушащего вещества, m контроллеров 7.1 - 7.m, связанных с приводными двигателями (на чертежах не показаны) для перемещения лафетных стволов 8.1 - 8.m в двух взаимно перпендикулярных направлениях, средство подачи огнетушащего вещества в лафетные стволы 8.1 - 8.m (на чертежах не показано).
Система содержит, по меньшей мере, две телевизионные камеры 1.1 - 1.n, размещенные в пределах контролируемой территории отдельно от лафетных стволов 8.1 - 8.n, произвольно по отношению к ним и на высоте, гарантирующей визуальный контакт со всеми пожароопасными объектами на контролируемой территории. Количество телевизионных камер 1.1 - 1.n не связано с количеством лафетных стволов 8.1 - 8.m. Инфракрасные каналы телевизионных камер 1.1 - 1.n использованы в качестве устройства обнаружения пламени.
Устройство 2 обработки и управления включает последовательно соединенные блок 3 видеозахвата, процессор 4, блок 5 расширения портов ввода-вывода. Входы блока 3 видеозахвата являются входами устройства 2 обработки и управления и соединены с выходами телевизионных камер 1.1 - 1.n. Выходы блока 5 расширения портов ввода-вывода являются выходами устройства 2 обработки и управления и через контроллеры 7.1 - 7.m связаны с приводными двигателями перемещения лафетных стволов 8.1 - 8.m и со входом управления средств подачи огнетушащего вещества (на чертеже не показано) в лафетные стволы 8.1 - 8.m. Пульт 6 оператора соединен двунаправленной связью со входом/выходом процессора 4 устройства 2 обработки и управления.
Устройство 2 обработки и управления также содержит устройство 9 обработки контура струи огнетушащего вещества и устройство 10 формирования сигналов коррекции параметров наведения лафетного ствола 8, а именно, угла, на который необходимо поднять лафетный ствол 8 по вертикали и угла разворота лафетного ствола 8 по горизонтали. Устройство 9 обработки контура струи выполнено с возможностью формирования двух сигналов ошибки попадания струи на область возгорания по величине и по направлению, зависящих от направления и скорости ветра. Устройство 9 обработки контура струи огнетушащего вещества и устройство 10 формирования сигналов коррекции соединены двунаправленной связью со входом/выходом процессора 4 устройства 2 обработки и управления. Устройства 9 и 10 могут быть реализованы программно с помощью процессора 4.
Для повышения достоверности обнаружения источника возгорания применяются двухканальные телевизионные камеры 1.1 - 1.n, содержащие инфракрасный канал и видеоканал. При этом видеоканал позволяет визуально контролировать территорию и процесс тушения источника возгорания, а инфракрасный канал дает возможность обнаружить источник возгорания в инфракрасном диапазоне излучения, например, по изменениям тепловых характеристик среды на контролируемой территории, а также определить координаты области возгорания.
Устройство 2 обработки и управления предназначено для анализа сигналов на выходах телевизионных камер 1.1 - 1.n, вычисления координат области возгорания и расстояния от источника возгорания до ближайшего к нему лафетного ствола 8, определения углов разворота лафетных стволов 8.1 - 8.m и передачи данной информации на контроллеры 7.1 - 7.m приводов их вертикального и горизонтального наведения и привод подачи огнетушащего вещества, а также формирования команды на прекращение подачи огнетушащего вещества и перемещение стволов 8.1 - 8.m в исходную позицию при отсутствии признаков горения в области возгорания.
Блок 3 видеозахвата предназначен для переключения входов между телевизионными камерами 1.1 - 1.n, преобразования аналогового видеосигнала в цифровой, а также ввода полученных данных в процессор 4. Блок 3 видеозахвата может быть выполнен, например, на базе процессора VFG7330ER фирмы «RTD».
Процессор 4 может иметь различную конфигурацию в зависимости от особенностей контролируемой территории. С помощью процессора 4 программным путем осуществляют обнаружение и вычисление координат области возгорания как функции от пространственных координат мест расположения телевизионных камер 1.1 - 1.n, предварительно занесенных в память процессора 4, вычисление расстояния от области возгорания до ближайших лафетных стволов 8.1 - 8.m, вычисление углов разворота лафетных стволов 8.1 - 8.m с учетом сил гравитации, передачу информации о развороте лафетных стволов на необходимые углы на контроллеры 7.1 - 7.m приводов. Процессор 4 может быть выполнен, например, на базе процессора СРС-500.
Блок 5 расширения портов ввода-вывода предназначен для передачи управляющих сигналов на контролеры 7.1 - 7.m приводов вертикального и горизонтального наведения лафетных стволов 8.1 - 8.m и привод подачи огнетушащего вещества, а также на пульт 6 оператора и может быть выполнен, например, на базе процессора РСМ-3614 фирмы «Advantec». Приводы вертикального и горизонтального наведения лафетных стволов и привод подачи огнетушащего вещества на чертеже не показаны.
Пульт 6 оператора представляет собой видеомонитор и соответствующие периферийные устройства, в частности устройство типа «мышь» или джойстик.
Контроллеры 7.1 - 7.m лафетных стволов предназначены для управления лафетными стволами 8.1 - 8.m с помощью встроенного программного обеспечения и могут быть выполнены, например, на базе контроллера AVR фирмы Atmel.
Устройство 9 обработки контура струи огнетушащего вещества предназначено для выделения контура струи в кадре от виделоканала телевизионной камеры для последующего определения расположения контура внутри телевизионного кадра. В результате обработки формируются два сигнала ошибки попадания струи огнетушащего вещества, по величине и по направлению, что однозначно связано с направлением и скоростью ветра на контролируемой территории. Устройство 10 предназначено для формирования сигналов коррекции параметров наведения лафетного ствола 8 с использованием сформированных устройством 9 двух сигналов ошибки попадания струи огнетушащего вещества на область возгорания. Устройство 10 формирует сигналы коррекции угла, на который необходимо поднять лафетный ствол 8 по вертикали, и угла разворота лафетного ствола 8 по горизонтали. Кроме того, устройство 10 корректирует выбор лафетного ствола 8, который необходимо задействовать для обработки обнаруженного источника возгорания.
Способ автоматического пожаротушения осуществляют следующим образом.
Телевизионные камеры 1.1 - 1.n размещают в пределах контролируемой территории отдельно от лафетных стволов 8.1 - 8.m и на произвольном расстоянии от них. Вычисляют пространственные координаты расположения телевизионных камер 1.1 - 1.n и лафетных стволов 8.1 - 8.m и заносят их в память процессора 4. Количество телевизионных камер 1.1 - 1.n, необходимое для предлагаемой системы пожаротушения, зависит от площади и сложности защищаемого объекта и не связано с количеством лафетных стволов 8.1 - 8.m. Однако для определения координат области возгорания необходимо использовать, как минимум, две телевизионные камеры.
С помощью средств обнаружения, в качестве которых использованы инфракрасные каналы, по меньшей мере, двух телевизионных камер 1.1 - 1.n обнаруживают наличие источника возгорания на контролируемой территории. С помощью процессора 4 вычисляют координаты области возгорания в виде пространственных координат в зависимости от координат расположения телевизионных камер 1.1 - 1.n, а также расстояние от границ области возгорания до ближайших лафетных стволов 8.1 - 8.m. Затем, в зависимости от расстояния до границ области возгорания и с учетом сил гравитации, вычисляют углы разворота лафетных стволов 8.1 - 8.m. После чего осуществляют подачу и распыление струи огнетушащего вещества в направлении источника возгорания, регулируя направление подачи струи в зависимости от изменяющихся координат области возгорания.
При использовании заявленного способа на открытых территориях при наличии ветра струя огнетушащего вещества отклоняется и не может достичь области возгорания с той точностью, которая определяется расчетным позиционированием лафетного ствола, т.к. обладает малой плотностью. Осуществляют автоматический контроль попадания струи огнетушащего вещества на обнаруженную область возгорания. Для этого выделяют контур струи с помощью видеоканала телевизионной камеры по признакам цвета и движения, сопоставляют его с областью возгорания и выявляют два сигнала ошибки попадания струи огнетушащего вещества на область возгорания. В соответствии с выявленными сигналами ошибки формируют сигналы коррекции углов разворота лафетного ствола по вертикали и по горизонтали, которые находятся в зависимости от направления и скорости ветра. Кроме того, по сигналам ошибки также корректируют выбор лафетного ствола 8.1 - 8.m, который необходимо задействовать для обработки обнаруженного источника возгорания. Вводят дополнительное управляющее воздействие на используемый лафетный ствол 8.1 - 8.m для компенсации влияния ветра.
Автоматическая система пожаротушения работает следующим образом.
Пожароопасные объекты размещаются на контролируемой территории с учетом условия обеспечения визуального контакта каждого объекта, как минимум с двумя телевизионными камерами 1.1 - 1.n, которые, предпочтительно, должны быть расположены с условием наилучшего обзора пожароопасных объектов. Предварительно вычисленные пространственные координаты расположения телевизионных камер 1.1 - 1.n и лафетных стволов 8.1 - 8.m заносят в память процессора 4.
Телевизионные камеры 1.1 - 1.n по инфракрасному каналу и видеоканалу передают информацию на блок 3 видеозахвата устройства 2 обработки и управления, где аналоговый видеосигнал преобразуется в цифровую форму и поступает на вход процессора 4. Процессор 4 идентифицирует обнаружение источника возгорания по следующим признакам:
- изменение яркости и температурного излучения источника возгорания по изображению от инфракрасного канала телевизионной камеры 1.1 - 1.n, зафиксировавшей возгорание;
- изменение площади области возгорания.
При появлении возгорания на поверхности одного из пожароопасных объектов, повышение температуры регистрируется сначала одной из телевизионных камер 1.1 - 1.n в виде повышения уровня сигнала от камеры в той точке телевизионного кадра (Фиг. 2), которая соответствует наблюдаемому объекту возгорания.
Область возгорания выделяется в телевизионном кадре с помощью процессора 4, который определяет границы области возгорания, сравнивая температуру излучения отдельных точек с предварительно заданным пороговым критическим значением температуры. Область возгорания окружается контуром 11 (Фиг. 2а). Процессор 4 производит вычисление координат области возгорания в единой системе координат, где известны предварительно вычисленные и внесенные в память процессора 4 координаты расположения телевизионных камер 1.1 - 1.n и лафетных стволов 8.1 - 8.m,
Определяются координаты «центра тяжести» области внутри контура 11 в системе координат телевизионного кадра, который впредь считается источником возгорания (точка F). Затем процессор 4 рассчитывает координаты точки F возгорания в системе координат территории и принимает решение, какой именно из лафетных стволов 8.1 - 8.m8.1 - 8.m наиболее близко расположен к точке F возгорания.
Координаты точки F возгорания в процессоре 4 рассчитываются приближенно, в предположении, что эта точка лежит в плоскости территории. Одновременно процессор 4 направляет сигнал от телевизионной камеры 1.1 - 1.n на пульт 6 оператора, а также сигнал от процессора 4, содержащий информацию о координатах точки F возгорания, поступает через блок 5 расширения к контроллеру 7.1 - 7.m приводных двигателей перемещения лафетного ствола 8.1 - 8.m, наиболее близко расположенного к точке F возгорания.
Для выбранного ствола 8.1 - 8.m процессор 4 вычисляет угол, на который необходимо его поднять по вертикали, и требуемый угол его разворота по горизонтали, при этом углы разворота лафетных стволов 8.1 - 8.m вычисляются с учетом сил гравитации (см, например, RU 2411974 С1).
Во время наведения выбранного лафетного ствола 8.1 - 8.m процессор 4 производит также вычисление динамических параметров области возгорания, т.е. изменение средней яркости (температуры) и изменение площади области возгорания, и задает с запасом площадь, на которой будет производиться тушение возгорания.
Параметры наведения поступают через блок 5 расширения портов ввода-вывода на контроллер 7.1 - 7.m привода для наведения выбранного лафетного ствола 8.1 - 8.m на область возгорания. При необходимости могут быть задействованы несколько лафетных стволов 8.1 - 8.m. В этом случае для каждого выбранного ствола 8.1 - 8.m процессор 4 вычисляет угол, на который необходимо его поднять по вертикали, и требуемый угол его разворота по горизонтали.
По достижении выбранными лафетными стволами 8.1 - 8.m соответствующего положения процессор 4 формирует команду на открытие средства подачи огнетушащего вещества в выбранные лафетные стволы 8.1 - 8.m, и производится подача и распыление струи огнетушащего вещества в направлении источника возгорания.
Информация об области возгорания также передается с процессора 4 на пульт 6 оператора. Благодаря видеоканалам телевизионных камер 1.1 - 1.n, оператор может визуально контролировать работу системы и в случае необходимости вмешиваться в процесс тушения области возгорания. За счет того, что телевизионные камеры 1.1 - 1.n расположены отдельно от лафетных стволов 8.1 - 8.m, объективы камер в процессе тушения возгорания не загрязняются огнетушащим веществом.
Во время тушения возгорания область возгорания продолжает находиться под наблюдением камер 1.1 - 1.n. В случае, если приближенное определение координат точки F возгорания не позволило ликвидировать возгорание, оно обнаруживается другой телевизионной камерой 1.1 - 1.n, после чего устройство 2 обработки и управления и процессор 4 аналогично определяют координаты точки F возгорания в системе координат кадра второй телевизионной камеры 1.1 - 1.n, и это позволяет процессору 4 с помощью триангуляционных построений и методов стереоскопии определить точное значение координат точки F возгорания и по ним скорректировать сигнал управления, поступающий от процессора 4 через блок 5 расширения к контроллерам 7.1 - 7.m приводов лафетных стволов 8.1 - 8.m.
Автоматическая система пожаротушения постоянно контролирует не только наличие, появление и точное расположение точек F возгорания, но также и эффективность направления струи огнетушащего вещества на области возгорания. Видеоканалы телевизионных камер 1.1 - 1.n позволяют наблюдать и анализировать изображения струй огнетушащего вещества, направляемых лафетными стволами 8.1 - 8.m на точку F возгорания. Устройство 9 обработки контура струи выделяет струю огнетушащего вещества и окружает ее контуром 12. Выделение струи осуществляется по признакам цвета (струя белая) и по признакам движения, например, как это осуществляется в устройствах обнаружения движения на изображении методом межкадровой разности (см., например, Ярышев С.Н. Цифровые методы обработки видеоинформации и видеоаналитика: Учебное пособие. - СПб.: СПбГУ ИТМО, 2011. - 83 с). В телевизионном кадре от видеоканала телевизионной камеры 1.1 - 1.n в случае попадания струи огнетушащего вещества точно на область возгорания контур 12 струи должен расширяться вблизи точки F возгорания (Фиг. 2б). Для оценки положения контура 12 струи в устройстве 9 в качестве ориентиров на изображении используются фиксированные точки и линии, а именно:
- точка F возгорания,
- точка W начала струи огнетушащего вещества,
- линия 13, обозначающая места попадания огнетушащего вещества при изменении направления струи из лафетного ствола 8.1 - 8.m,
- линия 14, проходящая через точки F, W и всю площадь телевизионного кадра.
Анализ положения контура 12 струи огнетушащего вещества осуществляется следующим образом. Совпадение расширенной части контура 12 с точкой пересечения линий 14 и 13 является условием успешного пожаротушения, достигаемого при отсутствии ветра.
При отсутствии ветра площадь внутри контура 12 изображения струи делится, приблизительно, на равные части как линией 14, так и линией 13 (Фиг. 3а) (коррекция направления струи не нужна).
На Фиг. 3б показаны для примера четыре варианта положения контура 12 струи огнетушащего вещества на изображении, площади которых по-разному распределены в телевизионном кадре относительно линий 14 и 13.
При наличии ветра струя огнетушащего вещества отклоняется в определенном направлении (Фиг. 3б), площадь внутри контура 12 изображения струи делится линиями 13 и 14 уже в другом соотношении (Фиг. 3в).
Устройство 9 обработки контура струи вычисляет площадь, ограниченную контуром 12 струи, вычисляет соотношение, в котором эта площадь делится линией 14 и формирует, исходя из этого соотношения, сигнал ошибки направления - первый из двух сигналов коррекции положения лафетного ствола 8. Второй сигнал коррекции ошибки направления лафетного ствола 8 - сигнал ошибки дальности, формируется устройством 9 путем вычисления соотношения площадей внутри контура 12 изображения струи, образованных делением контура 12 линией 13. Оба сформированные таким образом сигнала ошибки направления ориентации лафетного ствола 8 управляют наведением струи на область возгорания.
На Фиг. 3в показаны три варианта положения контура 12 струи огнетушащего вещества при наличии ошибки позиционирования струи из-за наличия ветра. Из Фиг. 3в видно, что линии 13 и 14 разделяют площадь каждого контура 12 в различном соотношении, в зависимости от наличия ошибки дальности или ошибки направления распространения струи.
Эти сигналы ошибки поступают на вход устройства 10 для формирования сигналов коррекции параметров наведения выбранного лафетного ствола 8.1 - 8.m, как для поворота его в горизонтальной плоскости (сигнал коррекции азимута), так и для изменения угла наклона ствола к горизонту (сигнал коррекции дальности). Эти сигналы ошибки также являются исходными для коррекции принимаемого процессором 4 выбора лафетного ствола 8.1 - 8.m, ближайшего к источнику возгорания.
Устройство 10 формирует два сигнала коррекции направления выбранного лафетного ствола 8.1 - 8.m - для коррекции угла поворота в горизонтальной плоскости (сигнал коррекции азимута) и для коррекции угла к горизонту (сигнал коррекции дальности).
При достижении температуры излучения области 11 возгорания ниже порогового критического значения процессор 4 определяет состояние отсутствия признаков возгорания и формирует команды на закрытие подачи огнетушащего вещества в лафетные стволы 8.1 - 8.m и их перемещение в исходную позицию.
Для реализации изобретения используются обычные конструкционные материалы и оборудование, что обусловливает, по мнению заявителя, соответствие заявленного изобретения условию патентоспособности «Промышленная применимость».
1.1 - 1.n - двухканальные телевизионные камеры
2 - устройство обработки и управления
3 - блок видеозахвата
4 - процессор
5 - блок расширения портов ввода-вывода
6 - пульт оператора
7.1 - 7.m - контроллеры
8.1 - 8.m - лафетные стволы
9 - устройство обработки контура струи огнетушащего вещества
10 - устройство формирования сигналов коррекции параметров наведения лафетного ствола
11 - контур области возгорания
12 - контур струи огнетушащего вещества
13 - линия, обозначающая места попадания огнетушащего вещества при изменении направления струи из лафетного ствола 8
F - точка возгорания
W - точка начала струи огнетушащего вещества
14 - линия, проходящая через точки F, W и всю площадь телевизионного кадра
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2411974C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИМПУЛЬСНОГО ПОЖАРОТУШЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2288015C2 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| Пожарный извещатель для наведения пожарного робота | 2016 |
|
RU2625715C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ПОЖАРОТУШЕНИЯ | 1993 |
|
RU2046613C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С АЗОТНО-ВОДЯНЫМ ПОЖАРОТУШЕНИЕМ | 2010 |
|
RU2426603C1 |

Группа изобретений относится к автоматическим средствам пожаротушения, а именно к техническим средствам управления устройствами подачи огнетушащего вещества на основе определения пространственных координат области возгорания, которые могут быть использованы для тушения пожаров, в том числе на открытых территориях при наличии ветра. Способ автоматического пожаротушения включает обнаружение источника возгорания на контролируемой территории с помощью средств обнаружения, определение координат области возгорания, подачу и распыление струи огнетушащего вещества из лафетного ствола в направлении источника возгорания с возможностью регулирования направления подачи струи в зависимости от координат области возгорания. В качестве средств обнаружения используют инфракрасные каналы по меньшей мере двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, причем координаты области возгорания вычисляют в виде пространственных координат в зависимости от координат расположения телевизионных камер, а углы разворота лафетного ствола вычисляют в зависимости от его расстояния до границ области возгорания с учетом сил гравитации. Осуществляют контроль попадания струи огнетушащего вещества на область возгорания путем выделения контура струи с помощью видеоканала телевизионной камеры по признакам цвета и движения, сопоставления его с областью возгорания и формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра. Повышается эффективность пожаротушения на открытых территориях при наличии ветра за счет обеспечения возможности непрерывного автоматического контроля попадания струи огнетушащего вещества на область возгорания и компенсации влияния на реальную траекторию струи наличия ветра за счет автоматической коррекции направления струи огнетушащего вещества в зависимости от направления и скорости ветра. 2 н. и 4 з.п. ф-лы, 6 ил.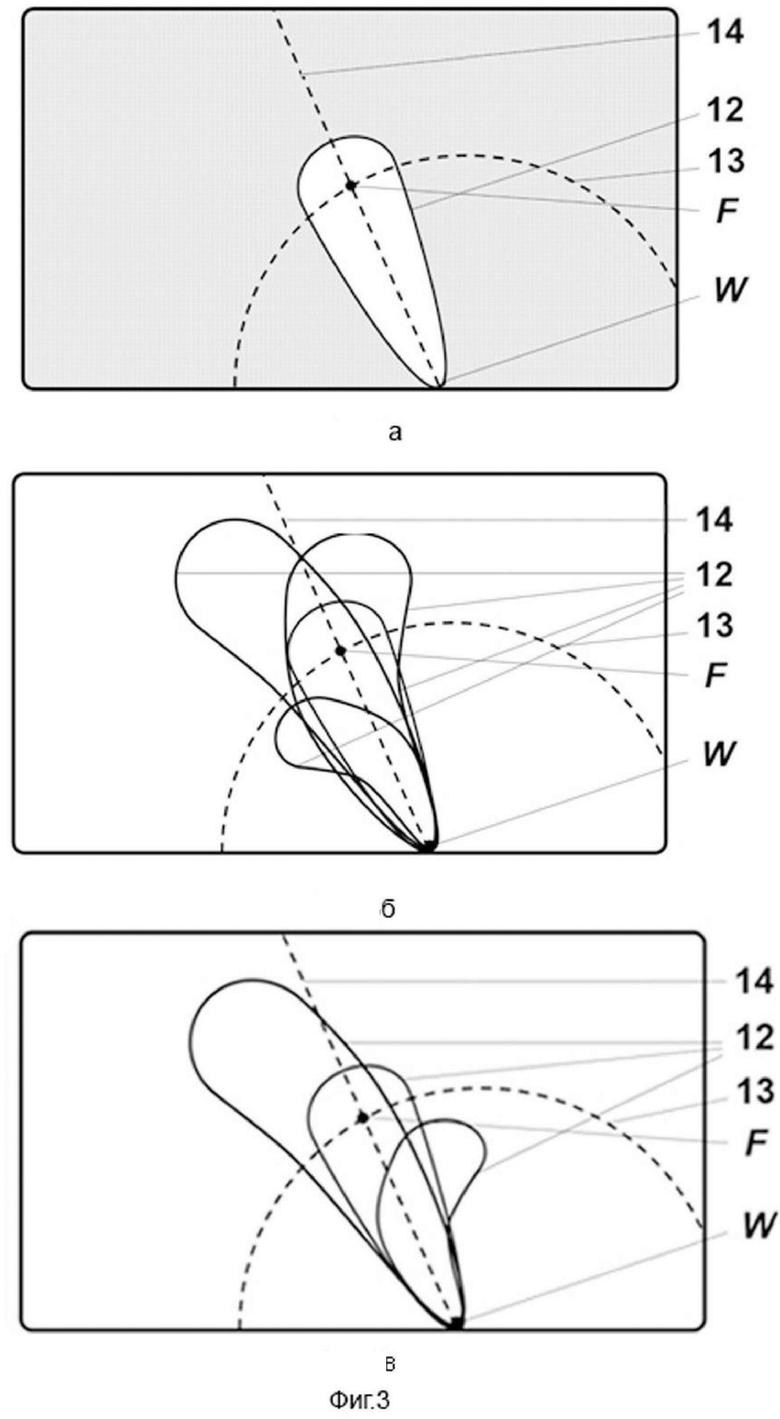
1. Способ автоматического пожаротушения, включающий обнаружение источника возгорания на контролируемой территории с помощью средств обнаружения, определение координат области возгорания, подачу и распыление струи огнетушащего вещества из лафетного ствола в направлении источника возгорания с возможностью регулирования направления подачи струи в зависимости от координат области возгорания, при этом в качестве средств обнаружения используют инфракрасные каналы по меньшей мере двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, причем координаты области возгорания вычисляют в виде пространственных координат в зависимости от координат расположения телевизионных камер, а углы разворота лафетного ствола вычисляют в зависимости от его расстояния до границ области возгорания с учетом сил гравитации, отличающийся тем, что осуществляют контроль попадания струи огнетушащего вещества на область возгорания путем выделения контура струи с помощью видеоканала телевизионной камеры по признакам цвета и движения, сопоставления его с областью возгорания и формирования сигналов коррекции углов разворота лафетного ствола по вертикали и по горизонтали в зависимости от направления и скорости ветра.
2. Способ по п.1, отличающийся тем, что определяют лафетный ствол, ближайший к источнику возгорания, и подачу и распыление струи огнетушащего вещества осуществляют из ближайшего лафетного ствола.
3. Автоматическая система пожаротушения для осуществления способа по п.1, содержащая средства пожаротушения в виде по меньшей мере двух лафетных стволов для распыления струи огнетушащего вещества, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях, контроллеры, связанные с приводными двигателями для перемещения лафетных стволов в первом и втором направлениях, средство подачи огнетушащего вещества в лафетные стволы, устройство обнаружения пламени в виде инфракрасных каналов по меньшей мере двух двухканальных телевизионных камер, включающих инфракрасный канал и видеоканал, устройство обработки и управления, выполненное на базе процессора с возможностью вычисления координат области возгорания в виде пространственных координат в зависимости от координат расположения телевизионных камер и вычисления углов разворота лафетных стволов в зависимости от их расстояния до границ области возгорания с учетом сил гравитации¸ при этом выходы устройства обработки и управления через контроллеры связаны с приводными двигателями перемещения лафетных стволов и с входом управления средствами подачи огнетушащего вещества в лафетные стволы, а входы устройства обработки и управления соединены с выходами инфракрасных каналов телевизионных камер, отличающаяся тем, что устройство обработки и управления снабжено устройством обработки контура струи огнетушащего вещества, выполненного с возможностью формирования двух сигналов ошибки попадания струи в область возгорания по величине и по направлению в зависимости от направления и скорости ветра, и устройством формирования сигналов коррекции угла, на который необходимо поднять лафетный ствол по вертикали, угла разворота лафетного ствола по горизонтали, а также для выбора лафетного ствола, который необходимо задействовать для обработки обнаруженного источника возгорания, причем устройство обработки контура струи огнетушащего вещества и устройство формирования сигналов коррекции соединены двунаправленной связью с входом/выходом процессора устройства обработки и управления.
4. Система по п.3, отличающаяся тем, что устройство обработки и управления включает последовательно соединенные блок видеозахвата, процессор и блок расширения портов ввода-вывода, выходы которого являются выходами устройства обработки и управления, входами которого являются входы блока видеозахвата.
5. Система по п.3, отличающаяся тем, что устройство обработки и управления выполнено с возможностью вычисления расстояния от источника возгорания до ближайшего лафетного ствола.
6. Система по п.3, отличающаяся тем, что телевизионные камеры расположены на высоте, гарантирующей визуальный контакт со всеми пожароопасными объектами на контролируемой территории.
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2411974C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ПОЖАРОТУШЕНИЯ | 1993 |
|
RU2046613C1 |
| CN 110801588 A, 18.02.2020 | |||
| EP 1246669 B1, 06.04.2005. | |||

