Изобретение относится к землеройно-транспортной технике, в частности к экскаваторам, на стреле которых монтируется землероющий инструмент, например комбинация с обратной лопатой.
Известно рабочее орудие, включающее базовое средство, на котором закреплено рабочее оборудование в виде шарнирно соединенных стрел и рукоятки, каждая из которых выполнена из звеньев, связанных опорно-поворотным механизмом, размещенным между соответствующими шарнирами соединения стрелы с базовым средством, стрелы с рукоятью и рукояти с инструментом.
Целью изобретения является усовершенствование устройства вышеуказанного типа, обеспечивающее повышенную маневренность движения стрелы, благодаря чему это устройство может работать с различными рабочими органами и иными устройствами.
Цель достигается тем, что два из звеньев стрелы разделены на два по меньшей мере элемента, которые скреплены друг с другом с помощью опорно-поворотных соединений, которые находятся между точками размещения шарниров.
Существенным для изобретения является то, что дополнительно к обеспечивающему возможность поворота шарнирному соединению отдельных звеньев стрелы, с одной стороны, между собой, а также к базовому узлу, с другой стороны, по меньшей мере два из звеньев разделены на элементы, которые скреплены друг с другом с помощью опорно-поворотных соединений. Это в сочетании с известными поворотными движениями звеньев относительно к базовому узлу или друг относительно друга обеспечивает существенно увеличенную степень подвижности концевой точки стрелы, несущей инструмент. При этом базовый узел может быть, например, транспортным средством экскаватора, крана или тому подобного устройства. Однако может также при этом идти речь о промышленном роботе или аналогичном устройстве, которое применяется соответственно в стационарных или также мобильных условиях эксплуатации для манипулирования инструментами различнейшего вида. Вид примененного инструмента, в принципе, любой, однако его соединение со стрелой должно быть выполнено максимально простым, так чтобы было возможно в случае необходимости провести простую замену.
Признаки последующих пунктов формулы направлены на конструкции опорно-поворотных соединений. В принципе они могут быть расположены в любом месте стрелы, в особенности также в зоне ее шарнирного крепления к транспортному средству и там могут быть конструктивно объединены с его поворачиваемым шарнирным соединением. Дополнительно к этому угол наклона оси опорно-поворотного соединения может быть также выполнен регулируемым относительно базовой плоскости, например, опорной плоскости транспортного средства.
В принципе опорно-поворотные соединения должны быть выполнены так, чтобы был возможен поворот по меньшей мере на 360о. Однако во многих случаях достаточны углы поворота или отклонения меньшей величины. Предусмотрено значительное улучшение и без того имеющихся поворачиваемых шарнирных соединений звеньев стрелы путем того, что они конструктивно объединены с шарнирными соединениями для поворота вокруг нескольких осей, проходящих параллельно к соседним плоскостям поперечных сечений узла стрелы.
Каждое опорно-поворотное соединение, а также каждое дополнительное поворотное шарнирное соединение может быть сопряжено с независимо управляемым приводом. Этот привод выполнен в виде гидравлического привода. Однако также может идти речь и об электрическом приводе. В качестве привода рассматривается как линейный привод, например блок поршень-цилиндр, так и поворотный привод.
Возможен также вариант исполнения, в котором подвижность стрелы по отношению к базовому узлу реализована с помощью специального шарнирного крепления стрелы в сочетании с двумя различно, но управляемо нагружаемыми блоками поршень-цилиндр. Оба блока поршень-цилиндра имеют общую точку шарнирного крепления на стреле, однако отдельные друг от друга точки шарнирного крепления к базовому узлу, так что благодаря управлению блоками поршень-цилиндр возможны поворотные движения стрелы в двух перпендикулярных друг другу плоскостях. Все точки шарнирного крепления, включая точки крепления стрелы к базовому узлу или к установленному там опорно-поворотному соединению, выполнены в виде шаровых шарниров или карданов.
Усовершенствуется также исполнение конца стрелы, несущего инструмент. Так на этой части стрелы могут быть шарнирно закреплены один или также несколько дополнительных плеч-вылетов, которые снова выполнены составными и оснащены различными, управляемыми с помощью двигателей приводами для поворота или вращения отдельных звеньев соответствующего дополнительного плеча. Такого типа варианты исполнения рациональны для промышленных роботов, однако также и для других случаев использования, где всегда речь идет о взаимодействии или воздействии нескольких различных инструментов на один и тот же объект или на одну и ту же заготовку.
Изобретением предлагаются различные варианты конструктивного объединения поворотных и вращательных движений. Под поворотными движениями здесь должны пониматься движения вокруг осей, проходящих в соседних плоскостях поперечных сечений стрелы, тогда как вращательные движения всегда являются такими, оси которых проходят перпендикулярно к соседним плоскостям поперечных сечений стрелы.
Стрелы, и особенно их элементы, могут быть выполнены телескопическими. Это же действительно для составляющих узлов дополнительного плеча или дополнительных плеч. В особенности улучшает движения подачи инструмента к месту его воздействия на объект комбинация из нескольких опорно-поворотных соединений с телескопическим исполнением.
Рациональную возможность управления, а также экономию энергии при работе инструмента обеспечивает соответствующая гидросистема, однако во внимание принимаются также и другие системы, включая электрические, причем дополнительно предусмотрена установка на стреле еще системы тросов, так что в зоне конца стрелы имеется в распоряжении растягивающее усилие, которое может быть преобразовано любым образом. Эта система тросов или в некоторых случаях также электрическая система могут использоваться альтернативно или совместно. Здесь может идти речь, говоря о наземном транспортном средстве, о дорожном транспортном сpедстве, а также о рельсовом транспортном средстве. В особенности принимаются во внимание колесные экскаваторы на гусеничном ходу, плавучие экскаваторы и краны, экскаваторы и краны, установленные на судах, тракторные погрузчики-экскаваторы, вильчатые погрузчики, колесные погрузчики, самоходные грейдеры, трелевочные машины, автокраны, оборудование трюмов, специальные транспортные средства и т.д.
Приводятся различные варианты исполнения базовых узлов, причем интерес представляют как мобильные, так и стационарные исполнения.
Базовый узел для компенсации опрокидывающих моментов оснащен по меньшей мере одним установленным с возможностью смещения противовесом. Это мероприятие, улучшающее стабильность устройства, особенно имеет значение при телескопических стрелах. Однако оно позволяет рациональные действия и соединения с опорно-поворотными соединениями. Смещаемый противовес целесообразным образом соединен с системой получения информации o мгновенном нагрузочном состоянии устройства, с помощью которой можно управлять положением противовеса. Противовес в экскаваторе расположен на верхней платформе, которая закреплена с возможностью поворота относительно ходовой части.
Изобретением рассматривается исполнение стрелы, особенно учитывающее свойства инструмента. В принципе может использоваться очень большое число различных инструментов, и они выполнены в соответствии с закрепляющими устройствами, смонтированными на конце стрелы. Далее базовый узел выполняет задачу хранилища, а также устройства, обеспечивающего снабжение систем хладагентом, смазочными материалами и иногда топливом (рабочей средой), например сжатым воздухом.
Описывается конструктивное исполнение опорно-поворотных соединений. Они должны сделать возможным в любом случае более быстрый поворот узлов стрелы относительно друг друга также и под нагрузкой и сделать возможным фиксацию, по возможности без люфтов, в определенной заранее позиции по углу поворота.
Устройства для измерения углов, особенно в сочетании с устройствами для измерения длин, которые соответственно служат для определения углов поворота, а также положения телескопических соединений узлов стрелы, могут служить совместно с управлением для автоматического выявления неблагоприятных нагрузок. Эти данные могут быть преобразованы в данные, учитывающие способ использования противовесов, а также использование других мероприятий для повышения устойчивости к опрокидыванию и т.д.
На фиг.1-5 приведены схемы исполнения различных вариантов экскаваторного вылета экскаватора "обратная лопата" (вид одноковшового экскаватора); на фиг. 6-9 различные варианты исполнения экскаватора с дополнительным инструментом; на фиг.10 вариант исполнения экскаватора для монтажа бурового станка; на фиг.11 сечение первого варианта исполнения устройства для осуществления вращения, предназначенного для применения в экскаваторе; на фиг.12 сечение следующего примера исполнения устройства для поворота экскаватора; на фиг. 13 стойка экскаватора для монтажа дополнительного инструмента, вид спереди; на фиг.14 то же, вид сбоку; на фиг.15 то же, модифицированный вариант исполнения стойки; на фиг.16 ходовая часть экскаватора, вид спереди; на фиг.17 вид А на фиг.16; на фиг.18 то же, вариант; на фиг.19 вид Б на фиг.18; на фиг. 20 инструмент, установленный на дополнительном плече (вылете); на фиг. 21 вид сверху на другой, закрепленный на дополнительном плече инструмент; на фиг.22 разрез В-В на фиг.21; на фиг.23 вид Б на фиг.18; на фиг.24 вид сверху на другой, закрепленный на дополнительном вылете инструмент; на фиг. 25 вид сверху на инструмент, подобный инструменту по фиг.24 и закрепленный на дополнительном вылете.
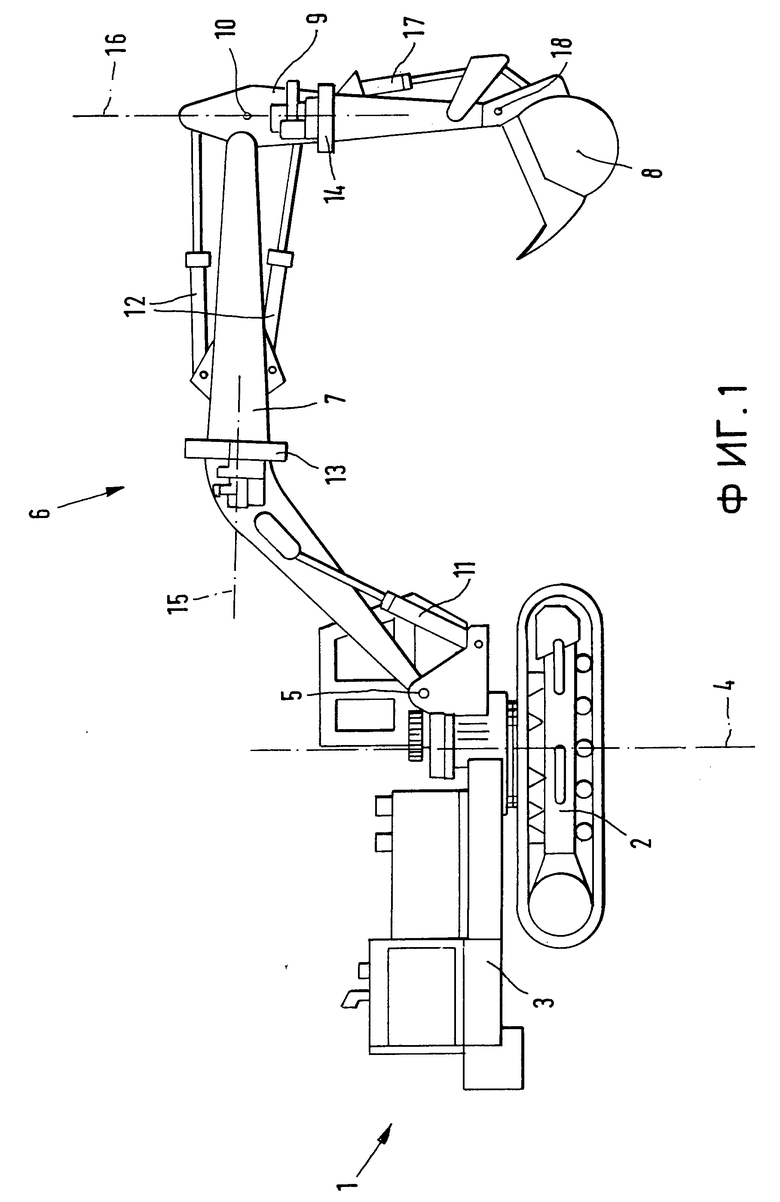
Позицией 1 на фиг.1 обозначено общее транспортное средство экскаватора, которое выполнено в виде гусеничного шасси 2, на котором закреплена с возможностью вращения вокруг вертикальной оси 4 платформа 3, несущая все агрегаты управления и привода. На параметрах транспортного средства, которое включает в себя среди других также и гидросистему, далее не следует подробно останавливаться. Речь может идти о любом другом транспортном средстве, например, оснащенном другим видом шасси.
На транспортном средстве 1 закреплен с возможностью поворота вокруг оси 5, проходящей перпендикулярно к плоскости изображения фиг.1, экскаваторный вылет 6, состоящий из шарнирно закрепленной на транспортном средстве 1 стрелы 7, на которой со своей стороны установлена рукоять 9, несущая землеройный инструмент, например обратную лопату. Рукоять 9 может поворачиваться относительно стрелы 7 вокруг оси 10, проходящей перпендикулярно к плоскости изображения фиг.1.
Для отклонения стрелы 7 вокруг оси 5, а также для отклонения рукояти 9 вокруг оси 10 предусмотрены соответственно установленные попарно блоки 11, 12 поршень-цилиндр, которые соединены с гидросистемой транспортного средства.
Стрела 7 выполнена изогнутой под углом и так же, как и рукоять 9, разделена на два звена (части), которые соединены друг с другом опорно-поворотным соединением 13, 14. Каждое из опорно-поворотных соединений делает возможным поворот соединяемых с его помощью друг с другом узлов на по меньшей мере 360о и предусмотрено со специальным поворотным приводом, а также с установочными устройствами для фиксирования дискретных положений по углу поворота отдельных узлов.
Позицией 15 обозначена ось, сопряженная с опорно-поворотным соединением 13, а позицией 16 обозначена ось, сопряженная с опорно-поворотным соединением 14. Поворотные приводы, соответственно сопряженные с опорно-поворотными соединениями 13, 14, выполнены в виде гидравлических приводов и соединены с гидросистемой транспортного средства 1. Благодаря взаимному повороту двух частей стрелы 7 и рукояти 9 получаются многообразные возможности позиционирования и эксплуатации землеройного инструмента 8.
Землеройный инструмент 8 в показанном примере исполнения может поворачиваться с помощью блока 17 поршень- цилиндр вокруг оси 18, проходящей перпендикулярно к плоскости изображения фиг.1.
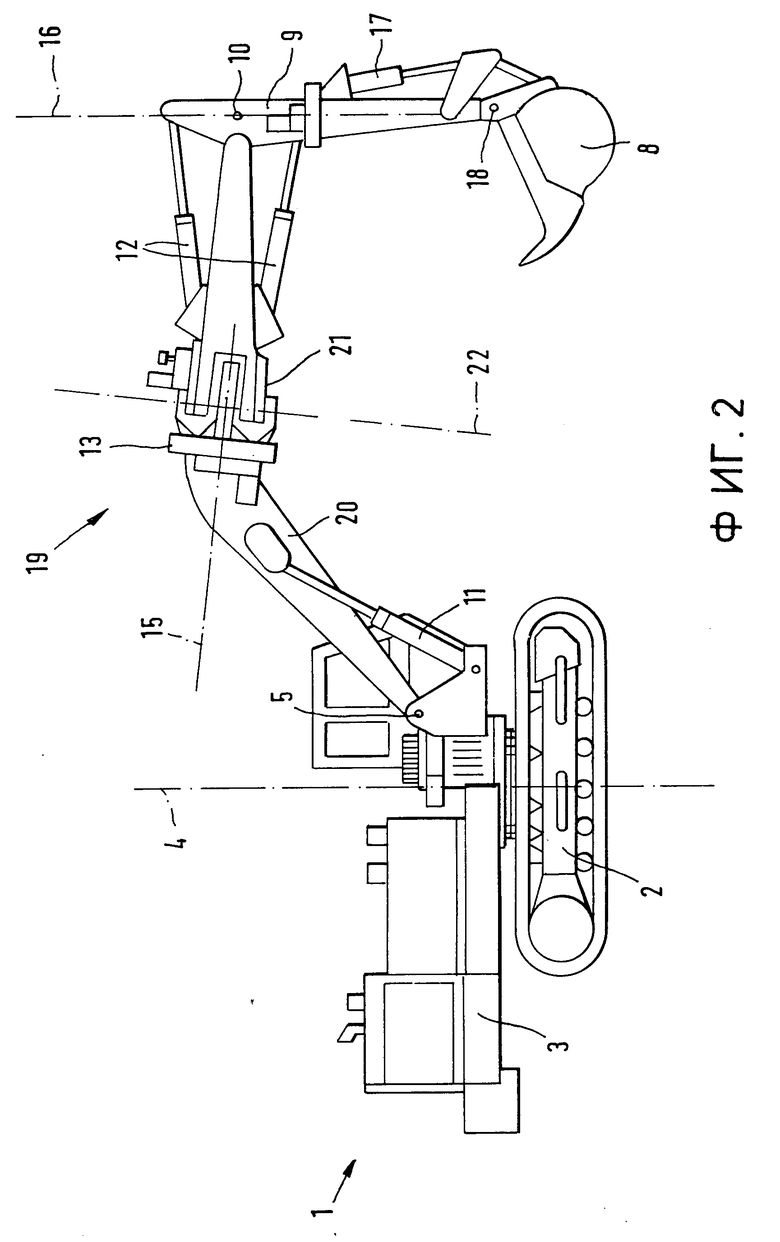
Показанный на фиг.2 экскаваторный вылет 19 отличается от того же вылета по фиг.1 лишь в том, что стрела 20, хотя и разделена на две части, соединенные опорно-поворотным соединением 13, сопряженным с осью 15, рядом с опорно-поворотным соединением 13 предусмотрено конструктивно связанное с ним дополнительное опорно-поворотное соединение 21, сопряженное с осью 22. Это означает, что соответственно сопряженный с двумя перпендикулярными друг к другу осями 15, 22 противоположный оси 5 конец стрелы 20 может дополнительно поворачиваться вокруг оси 22, что обеспечивает еще более далеко идущие установочные возможности для землеройного инструмента 8. Это двойное, отличающееся осями 15 и 22 опорно-поворотное соединение может быть предусмотрено альтернативно или также одновременно в рукояти 9.
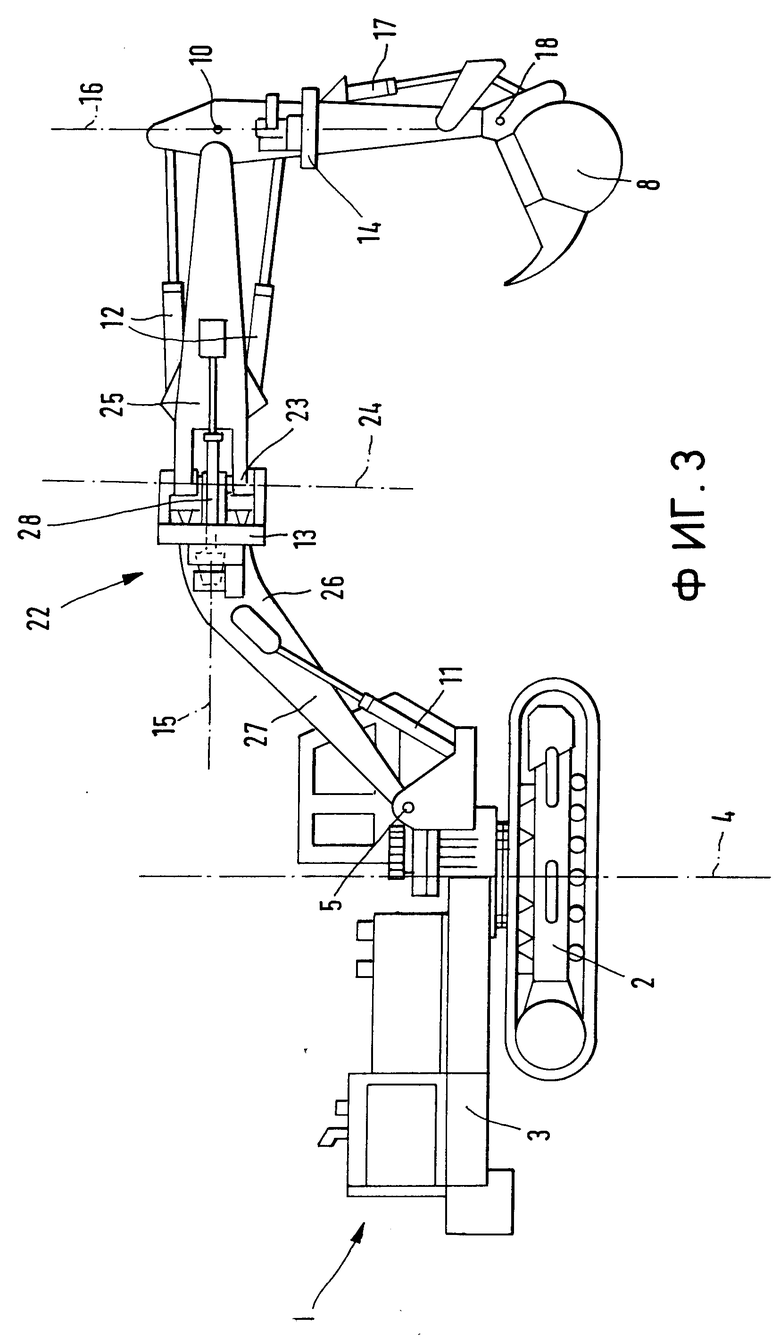
Показанный на фиг.3 экскаватор отличается от экскаватора по фиг.2 лишь свойствами экскаваторного вылета 22. Этот вылет дополнительно к опорно-поворотному соединению 13, сопряженному с осью 15, имеет дополнительное опорно-поворотное соединение 23, которое установлено непосредственно рядом с опорно-поворотным соединением 13 и ось 24 которого проходит перпендикулярно к оси 15. Опорно-поворотное соединение 23 отличается приемной зоной вильчатой формы, в которой может поворачиваться вокруг оси 24 часть 25 основной стрелы 26 по отношению к ее части 27. Для поворота служат блоки 28 поршень-цилиндр, расположенные по обе стороны от оси 24. Также и это двойное, отличающееся осями 15, 24 опорно-поворотное соединение может быть предусмотрено альтернативно или также одновременно в рукояти 9.
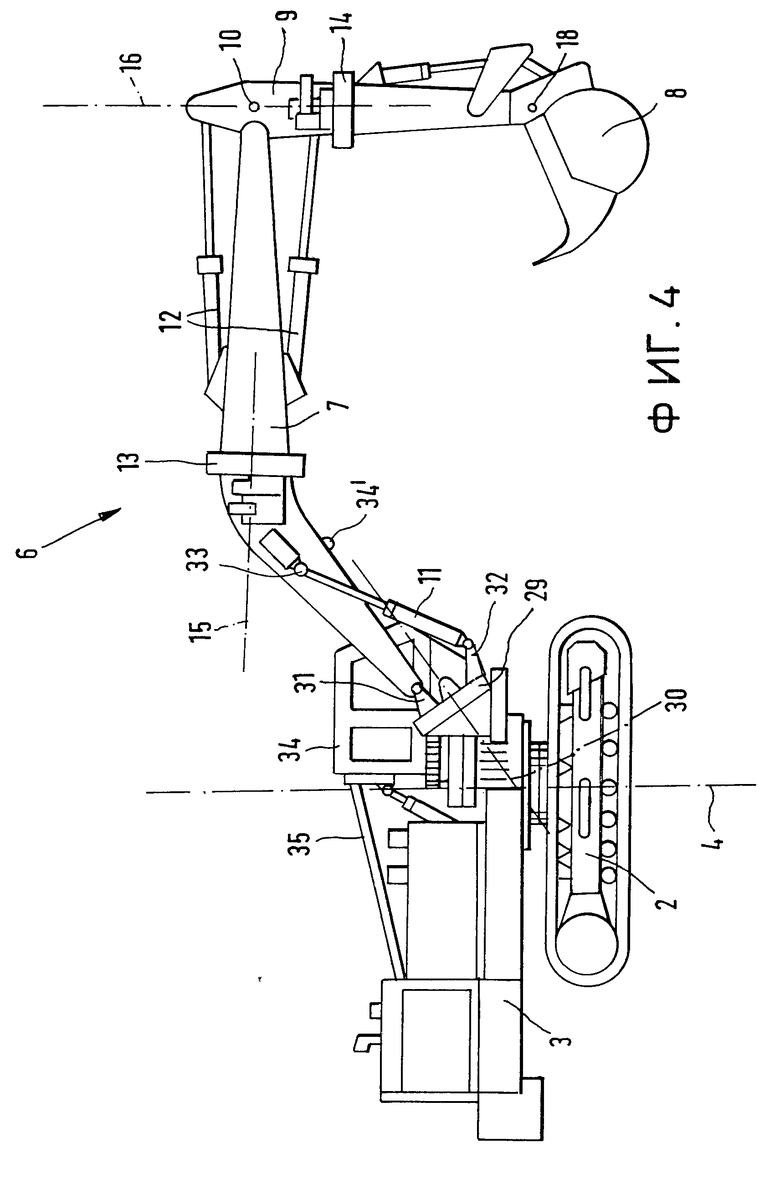
Экскаваторный вылет 6 показанного на фиг.4 экскаватора соответствует вылету по фиг.1 за исключением шарнирного соединения его опорной точки. Это соединение характеризуется опорно-поворотным соединением 29, сопряженным с осью 30. Опорно-поворотное соединение 29 образует поворачиваемую вокруг оси 30 по меньшей мере на 360о базу для шарнирного крепления опорной точки вылета 6 экскаватора. Названное последним шарнирное соединение характеризуется карданным шарниром 31, а сопряженные с шарниром 31 и также шарнирно скрепленные с опорно-поворотным соединением 29 блоки 11 поршень-цилиндр с двух сторон также шарнирно присоединены с помощью карданных шарниров 32, 33. Это означает, что вылет 6 экскаватора может поворачиваться относительно опорно-поворотного соединения 29 в двух перпендикулярных друг другу плоскостях и, тем самым, в особенности может опрокидываться в бок, дополнительно к повороту, обеспечиваемому поворотом в соединении 29 относительно оси 30. По соображениям безопасности в этом случае кабина 34 водителя должна быть смещена вправо. Особенно рациональная конструкция получается тогда, когда блоки поршень-цилиндр одновременно шарнирно закреплены к точке 34' стрелы. В сочетании с возможностью независимого друг от друга нагружения блоков поршень-цилиндр создается возможность поворотных движений стрелы 35 в двух перпендикулярных друг другу плоскостях.
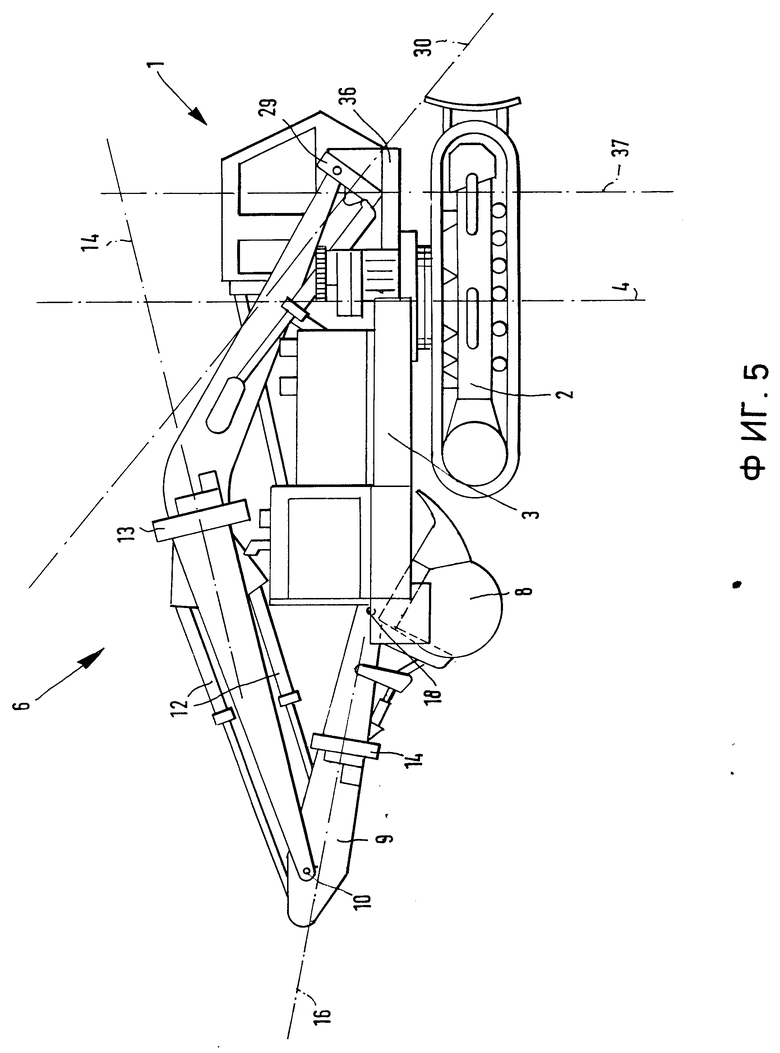
На фиг. 5 показан экскаватор с вылетом 6, шарнирное закрепление опорной точки которого отличается от варианта исполнения по фиг.4 тем, что предусмотрено дополнительное опорно-поворотное соединение 36, ось 37 которого проходит к оси 4, вертикально при горизонтальной опорной поверхности. Опорно-поворотное соединение 29 соединено с опорно-поворотным соединением 36.
Благодаря возможности управления по четырем осям при стоящем транспортном средстве 1 существуют многообразные возможности маневрирования для землеройного инструмента 8.
В представленных на фиг.6-9 экскаваторах, которые отличаются от экскаваторов по фиг.1-5, вновь функциональные элементы, которые совпадают с функциональными элементами представленных ранее экскаваторов, также имеют совпадающие номера позиций.
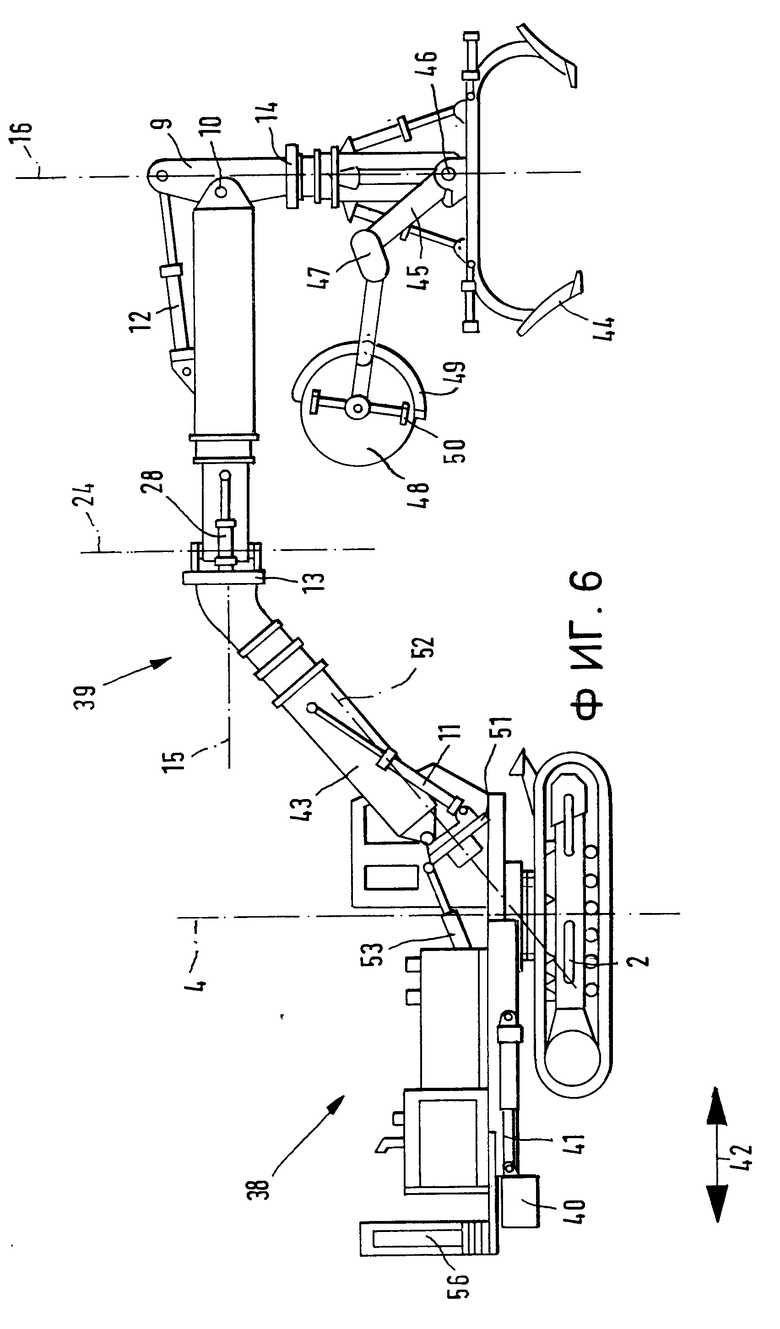
На фиг. 6 показан экскаватор, транспортное средство 38 которого имеет специальное исполнение для увеличения устойчивости по отношению к опрокидывающим моментам, вызываемым вылетом 39 экскаватора. Для этой цели транспортное средство предусмотрено с противовесом 40, который может прямолинейно смещаться в направлении стрелки 42 с помощью блока 41 поршень-цилиндр. Противовес 40 находится на конце транспортного средства 38, противоположном месту шарнирного закрепления вылета 39 экскаватора, и смещается в направлении стрелки 42 в соответствии с нагрузкой вылета 39 экскаватора для компенсации опрокидывающих моментов. В принципе может быть также предусмотрено несколько таких противовесов 40.
Стрела 43 снова выполнена изогнутой и отличается соединением 13 для осуществления поворота с осью 15 в средней зоне. Однако в дополнение к этому части стрелы по обе стороны от соединения 13 для осуществления поворота выполнены телескопическими, причем выдвижение телескопических участков осуществляется гидравлически. Рядом с соединением 13 для осуществления поворота расположено еще одно соединение для дополнительной возможности поворота вокруг оси 24 с помощью блоков 28 поршень-цилиндр. Это соответствует тому варианту исполнения, который представлен на фиг.3.
В другом исполнении рукоять 9 ниже опорно-поворотного соединения 14 также может быть телескопической, преимущественно может быть выполнено с гидравлическим приводом для телескопического смещения в направлении оси 16.
Показанный на фиг. 6 и установленный на рукояти 9 инструмент является грейферным блоком 44, который может служить для захвата тяжелых предметов, например стволов деревьев. На нижней части рукояти установлен дополнительный вылет 45, который может поворачиваться относительно рукояти 9 вокруг оси 46, перпендикулярной к плоскости изображения фиг.6. Дополнительный вылет 45 состоит из двух поворачиваемых друг относительно друга вокруг дополнительной оси 47, перпендикулярной к плоскости изображения, звеньев, из которых наружное звено несет полотно (диск) 48 пилы. Позицией 49 обозначено защитное устройство, охватывающее половину окружности диска 48 пилы, позицией 50 обозначена пара бегунковых колес, имеющих бочкообразную наружную поверхность, прилегающих к периферийной зоне к поверхности диска 48 пилы и служащих для демпфирования колебаний.
Особенно рациональна конструкция, когда основание дополнительного вылета 45, которое характеризуется возможностью поворота вокруг оси 46, крепится с возможностью смещения относительно стойки в направлении оси 16, например, в ползуне. Дополнительно к этому крепление к рукояти может быть выполнено телескопическим, перпендикулярно к плоскости изображения.
Позицией 51 отмечено опорно-поворотное соединение, которое образует связующее звено между вылетом 39 экскаватора и транспортным средством 38 и делает возможным поворот вылета экскаватора вокруг оси 52. Дополнительно к этому угловое положение оси 52 может быть выполнено переменным с помощью блоков 53 поршень-цилиндр.
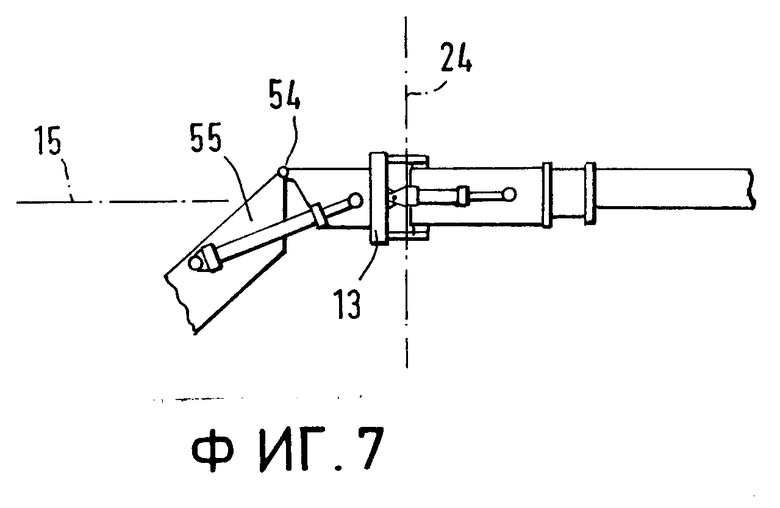
На фиг. 7 показана модификация вылета 39 экскаватора, заключающаяся в том, что точка перегиба основной стрелы 43 имеет шарнир, ось которого проходит перпендикулярно плоскости изображения фиг.7 и обозначена позицией 54. Для поворота вокруг этой оси 54 предусмотрен блок 55 поршень-цилиндр. В сочетании с шарнирным креплением основания стрелы к транспортному средству или к базовому узлу с помощью опорно-поворотного соединения обеспечиваются многообразные возможности в части установочных движений для конца стрелы.
На фиг.8 показан специальный вариант транспортного средства 43, которое собрано из двух частей, соединенных друг с другом шарниром. Позицией 55 обозначен шарнир, имеющий вертикальную ось поворота.
Позицией 56 на фиг.6 и 8 обозначены соответственно дополнительные захваты, которые выполнены и предназначены для обработки тяжелых предметов.
В остальном каждая из двух частей транспортного средства оснащена гусеничной ходовой частью 57, 57'.
Вылет 58 экскаватора имеет шарнирное крепление основания, которое совпадает с креплением на фиг.6.
Вылет 58 экскаватора состоит из основной стрелы 59, промежуточной части 60 и рукояти 9, причем промежуточная часть 60 собрана из ряда соединяемых соответственно шарнирами друг с другом и однотипных звеньев 61. С каждым шарниром снова сопряжен блок 62 поршень-цилиндр, а оси всех шарниров 63 перпендикулярны к плоскости изображения фиг.8.
В показанном примере исполнения звенья 61 могут быть разделены на две группы, которые соединены между собой с помощью опорно-поворотного соединения 64, причем это соединение снова сопряжено с блоком 65 поршень-цилиндр.
Рукоять 9, которая выполнена телескопической в направлении оси 16, имеет грейфер 44 и дополнительный вылет 45, который в части своего кинематического присоединения к стойке соответствует дополнительному вылету 45 по фиг.6 и здесь несет цепную пилу 66.
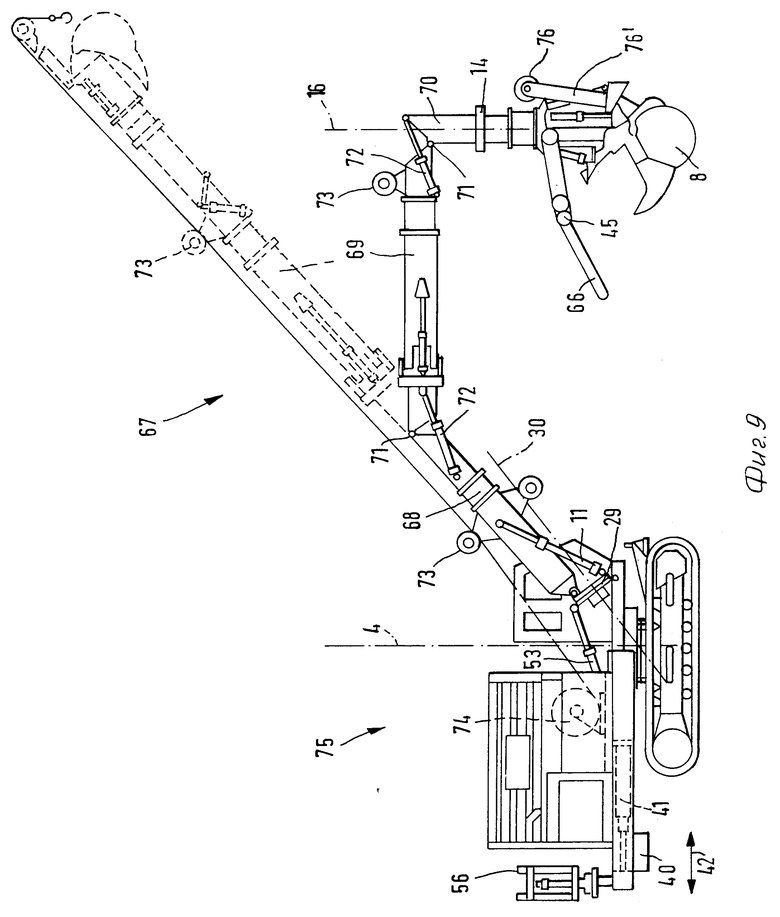
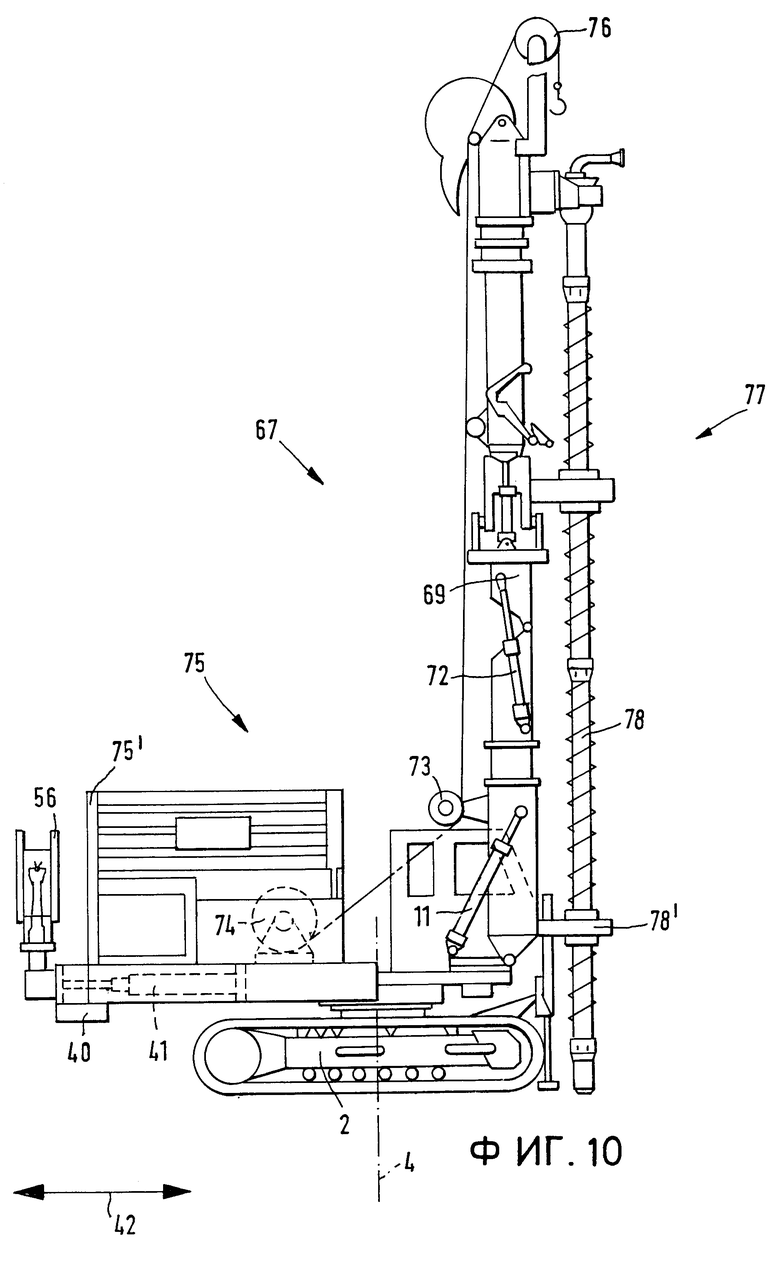
Существенным для экскаватора, показанного на фиг.9, является вылет 67 экскаватора, который состоит из основной стрелы 68, промежуточной части 69 и стойки 70. По меньшей мере одно из этих трех звеньев, а именно стрела, промежуточная часть или рукоять, выполнено телескопическим. Все эти части через шарниры 71 соединены друг с другом, причем с каждым шарнирным соединением сопряжен блок 72 поршень-цилиндр.
Позицией 73 обозначены бегунковые колеса, предназначенные для взаимодействия с имеющей привод от двигателя канатной лебедкой 74, причем эта лебедка 74 установлена на транспортном средстве 75. Лебедка 74 служит для обеспечения дополнительного тягового усилия в сочетании с лебедочным колесом 76, закрепленным на стойке 70. Обеспечиваемое лебедкой 74 тяговое усилие может быть любым образом преобразовано в механическую работу.
Оборудованный согласно фиг.9 экскаватор может быть особенно рационально использован в качестве носителя буровой установки 77 (фиг.10), причем для направления буровой штанги 78 стрела может быть оснащена несколькими опорами ли направляющими для буровой колонки, а также приводом для вращения буровых штанг 78. Одновременно на задней части транспортного средства 75 может быть размещен магазин 79 для буровых штанг, а также для других инструментов.
Чтобы увеличить вариантность, нижняя направляющая для буровой штанги 78 может быть также закреплена в промежуточной части 69.
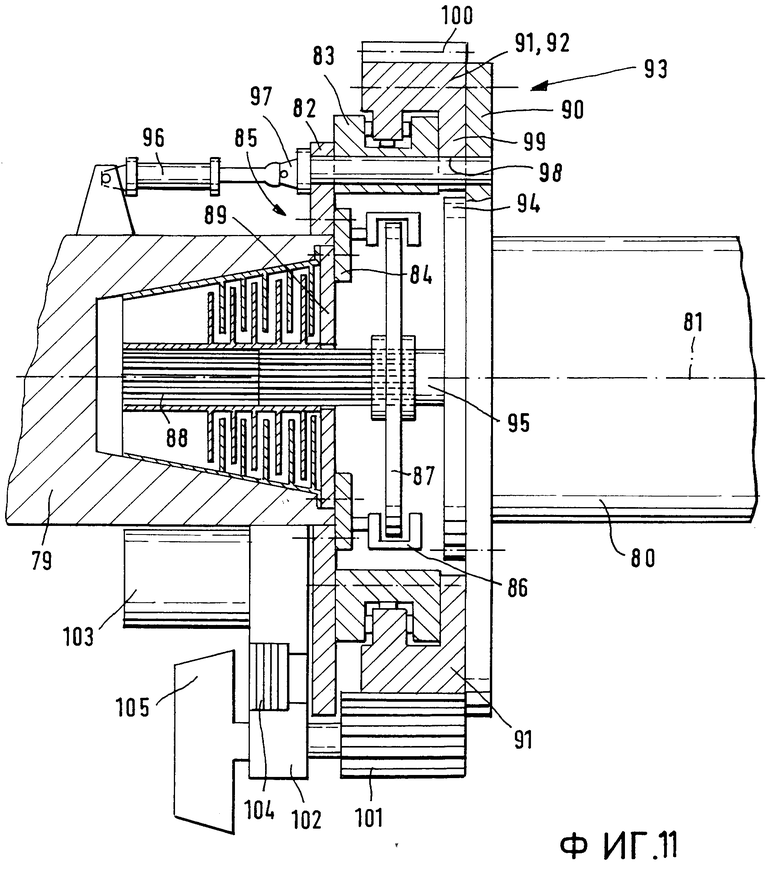
На фиг. 11 показан первый пример исполнения опорно-поворотного соединения, с помощью которого осуществляется соединение первой части 79, например, обращенного к транспортному средству 1, 38 или 75 конца стрелы вылета экскаватора и части 80, которая присоединяется к части 79 и по отношению к первой может с помощью двигателя поворачиваться вокруг оси 81 и фиксироваться в любых угловых положениях. Обе части 79, 80 выполнены в виде полых конструкций и могут в случае необходимости снабжаться усиливающими подкосами. Полые конструкции могут быть в поперечном сечении полигональными, однако также могут иметь форму окружности или любую другую форму.
Позицией 82 обозначена крепежная плита, установленная на торце конца части 79. Крепежная плита 82 находится на наружной стороне части 79 на ее торце и жестко соединена с этой частью.
К крепежной плите 82 закреплено внутреннеe кольцо 83 подшипника качения, которое окружает ось 81.
На крепежной плите закреплена кольцевая пластина 84 таким образом, что она входит в поперечное сечение части 79. Кольцевая пластина 84 соединена с крепежной плитой 8 элементом 85.
Кольцевая пластина 84 служит кроме того в качестве носителя 86 тормозных устройств, которые взаимодействуют с тормозным диском 87.
Кольцевая пластина 84 установлена на стороне, противоположной носителю 86 и предназначена для крепления за круговой пластиной 89 устройства, содержащего пластинчатый тормоз 88, причем круговая пластина 89 свинчена с кольцевой пластиной 84. Пластинчатый тормоз 88 находится внутри части 79.
Позицией 90 обозначена торцевая, находящаяся в жестком соединении с обращенным к части 79 концом части 80 крепежная плита, которая на своей наружной стороне несет наружное кольцо 91, образующее с внутренним кольцом 83 подшипник 92 качения. Наружное кольцо 91 соединено с крепежной плитой 90 элементом 93. Образованный таким образом подшипник 92 качения может быть выполнен в виде подшипника с перекрывающимися роликами или в виде сравниваемого с ним подшипника.
На крепежной плите 90, а именно на ее обращенной к части 79 стороне находится круглая пластина 94, соединенная с крепежной плитой 90. Проходящая перпендикулярно к оси 81 круглая пластина 94 несет коаксиальный к оси 81 вал 95, жестко соединенный с круглой пластиной 94 и с частью 80. На вал 95 с помощью шлицевого соединения или подобного ему соединения крепится тормозной диск 87, и удлинение этого вала 95 входит в пластинчатый тормоз 88 таким образом, что группа пластин находится в соединении жестко-торсионного типа с валом 95.
Использование пластинчатого тормоза 88 обычным образом может производиться путем того, что группа пластин, вращающаяся относительно его корпуса вместе с валом 95, аксиально смещается относительно группы пластин, жестко соединенных со своим корпусом, чтобы иметь возможность создания необходимого тормозного момента.
Позицией 96 обозначен закрепленный на части 79, на ее наружной стороне, блок поршень-цилиндр, поршень которого соединен с фиксирующим пальцем 97, предназначенным для ввода в отверстие 98, проходящее через крепежную плиту 82, внутреннее кольцо 83, деталь 99, насаженную на наружное кольцо, и крепежную плиту 90. В связи с тем, что внутреннеe кольцо 83 соединено с частью 79, а наружное кольцо 91 через крепежную плиту 90 соединено с частью 80, введенный фиксирующий палец 97, который проходит через все названное отверстие 98, предотвращает относительное вращение частей 79, 80 вокруг оси 81. Предусмотрено несколько таких оснащенных блоками 96 поршень-цилиндр фиксирующих устройств при их равномерном распределении по окружности.
Наружное кольцо 91 снабжено наружным зацеплением 100, которое сцеплено с шестерней 101 передачи 102, которая со своей стороны соединена с двигателем 103, преимущественно гидромотором. Передача 102, а также двигатель 103 образуют конструктивный узел, который закреплен на той стороне крепежной плиты 82, которая противоположна внутреннему кольцу 83, то есть он связан с крепежной плитой 82. С передачей 102 также может быть конструктивно соединено дополнительное тормозное устройство 104 по типу пластинчатого тормоза. Позицией 105 обозначен тормоз со стопорным устройством, воздействующий непосредственно на шестерню 101.
Представленная на фиг.11 система оснащена различными тормозными устройствами, а именно пластинчатым тормозом 88, устройством 104 и дисковым тормозом, который образуется держателем 86 в сочетании с тормозным диском 87. Далее для фиксации угла поворота части 80 относительно части 79 предусмотрены два различных блокирующих устройства, а именно система с фиксирующими пальцами 97, управляемыми блоками 96 поршень-цилиндр, а также тормоз 105 со стопорным устройством. Эти тормозные устройства могут работать частично альтернативно, частично кумулятивно с тем, чтобы обеспечить оптимальные возможности не только для очень быстрого и эффективного торможения, особенно под нагрузкой, но также и для фиксации практически без люфтов частей 79, 80 друг относительно друга, а именно, несмотря на неизбежные при наличии передач допуски. После окончания процесса поворота с помощью двигателя 103 возможна блокировка частей 79, 80 в соответствующей позиции по углу поворота без участи двигателя 103.
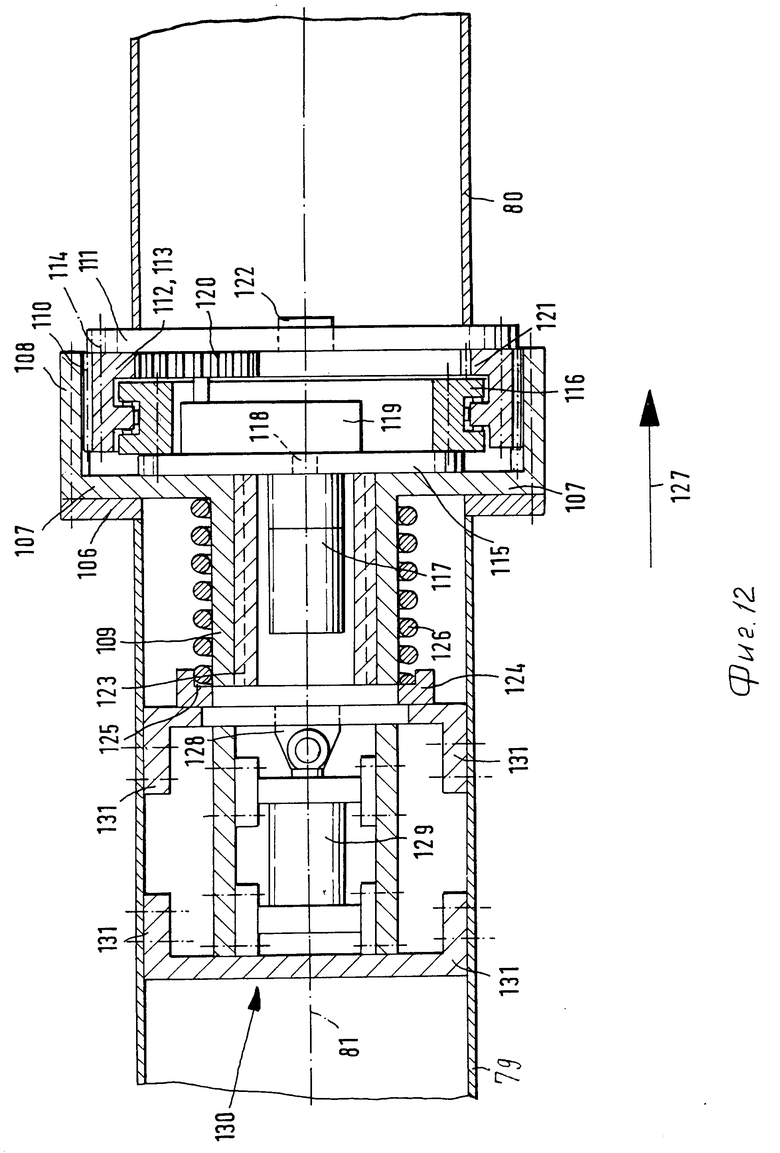
На фиг.12 показан следующий пример исполнения опорно-поворотного соединения, который разъясняется с помощью примера соединения двух частей 79, 80, причем позицией 81 обозначена ось опорно-поворотного соединения. На торце части 79 находится выступающая от этой части радиально наружу крепежная плита 106, жестко соединенная с частью 79. На крепежной плите закреплена кольцевая пластина 107, которая на своем радиально наружном конце продолжается в виде цилиндрической части 108, проходящей коаксиально к оси 81, а на своей радиально внутренней стороне продолжается в виде цилиндрической направляющей части 109, проходящей также коаксиально к оси 81. Цилиндрическая часть 108, кольцевая пластина 107, а также направляющая часть 109 могут быть выполнены в виде единой детали, однако эти части могут быть также выполнены в виде отдельных деталей, которыe скрепляются друг с другом. Вместо цилиндрической направляющей части 109 может быть также предусмотрена деталь с полигональным или иным поперечным сечением.
Цилиндрическая часть 108 на своей радиально внутренней стороне выполнена с зацеплением 110.
Позицией 111 обозначена кольцевая пластина, жестко соединенная с торцом части 80 и радиально выступающая от этой части. Соединение между кольцевой пластиной 111 и частью 80 может быть выполнено любым образом.
Кольцевая пластина 111 несет на своей обращенной аксиально к части 79 стороне наружное кольцо 112 подшипника 113 качения, принцип действия которого будет рассмотрен ниже. Наружное кольцо 112 пригодным образом закреплено на кольцевой пластине 111, причем в показанном примере исполнения место свинчивания отмечено позицией 114. Наружное кольцо 112 несет на своей радиальной наружной стороне зубья, которые входят в зацепление 110 с зубьями цилиндрической части 108.
Позицией 115 обозначена круглая пластина, к которой прикреплена та сторона кольцевой пластины 107, которая противоположна крепежной плите 106, причем эта круглая пластина свинчена с кольцевой пластиной 107. Круглая пластина 115 проходит коаксиально к оси 81 и несет на своей радиально наружной зоне внутреннее кольцо 116 подшипника 113 качения. Подшипник 113 качения может быть вновь выполнен в виде конического роликового подшипника или подшипника качения другого вида.
На стороне круглой пластины 115, обращенной к части 79, закреплен двигатель 117, преимущественно гидромотор, выходной вал 118 которого проходит через отверстие в круглой пластине 115, коаксиальное оси 81, и соединяется с помощью передачи 119, также закрепленной на круглой пластине 115, с шестерней 120, находящейся в радиально наружной зоне. Наружное кольцо 112 имеет боковой вылет 121, снабженный внутренним зубчатым венцом, находящимся в зацеплении с шестерней 120.
Двигатель 117 служит для поворота частей 79, 80 вокруг оси 81 друг относительно друга.
Позицией 122 обозначено устройство для измерения углов, с помощью которого может быть определен угол поворота частей 79, 80.
Приводное соединение с целью поворота частей 79, 80 может осуществляться с помощью внутреннего кольца подшипника 91 качения 113.
Позицией 123 обозначена цилиндрическая направляющая труба, которая одним своим концом закреплена к кольцевой пластине 115, и которая на другом своем конце несет держатель 124. Направляющая труба 123 направлена внутри направляющей части 109 без возможности относительного поворота с помощью направляющей в виде ласточкиного хвоста или сравниваемого с ним функционального элемента, причем направляющая часть 109 снабжена выфрезеровками в виде прорезей, которые пронизывают выполненную в виде перегородки среднюю часть держателя 124, радиальная наружная часть которого выполнена в виде кольца, причем корпус кольца в поперечном сечении имеет форму уголка и направлен по наружной стороне направляющей части 109. Держатель 124 образует проходящую аксиально кольцевую канавку 125, служащую для приема пружинного элемента 126, охватывающего направляющую часть 109 и прилегающего одним концом к держателю 124 и другим концом к кольцевой пластине 107. При смещении направляющей трубы 123 по отношению к направляющей части 109 в направлении стрелки пружинный элемент 126 действует в качестве возвратной пружины.
Позицией 128 обозначено соединительное устройство, с помощью которого средняя часть держателя 124 соединена с поршнем блока 129 поршень-цилиндр. Блок 129 поршень-цилиндр смонтирован в основании 130, которое жестко соединено с частью 79 и с последней, например, свинчено с помощью фиксирующих элементов 131, которые одновременно осуществляют ужесточающее действие по отношению к торсионной (скручивающей) нагрузке.
В показанной на фиг.12 позиции двух частей 79, 80 эти части зубчатым зацеплением 110 жестко соединены друг с другом без возможности поворота, причем с помощью двигателя 117 в сочетании с передачей 119, шестерней 120 и внутренним зацеплением внутреннего кольца 112 выбирается возможный зазор в зоне зацепления 110. Для поворота части 80 относительно части 79 с помощью силового нагружения блока 129 поршень-цилиндр через соединительное устройство 128, держатель 124, направляющую трубу 123 смещается по направлению стрелки 127 круглая пластина 115 вместе с подшипником 113 качения, а именно против усилия возврата пружинного элемента 126. Это смещение происходит на такую величину, что выводятся из зацепления наружная сторона наружного кольца 112 и внутренняя сторона цилиндрической части 108, так что в результате с помощью двигателя 117 и шестерни 120 может поворачиваться часть 80 в отношении части 79 вокруг оси 81. Если при этом будет обеспечена окончательная позиция углового смещения, которая определяется устройством 122 для измерения углов, то с блока 129 поршень-цилиндр снимается давление, так что под действием пружинного элемента 126 снова возникает зубчатое сцепление между наружной стороной наружного кольца 112 и внутренней стороной цилиндрической части 108. Дополнительно к этому с помощью устройства 122 для измерения углов простым образом может осуществляться точная установка входящих в зацепление друг с другом зубчатых профилей названных наружного кольца и цилиндрической части, в особенности выверка следующих друг за другом профилей или впадин зубьев, так что предотвращаются повреждения профилей зубчатого зацепления вследствие процессов введения в зацепление и выведения из зацепления.
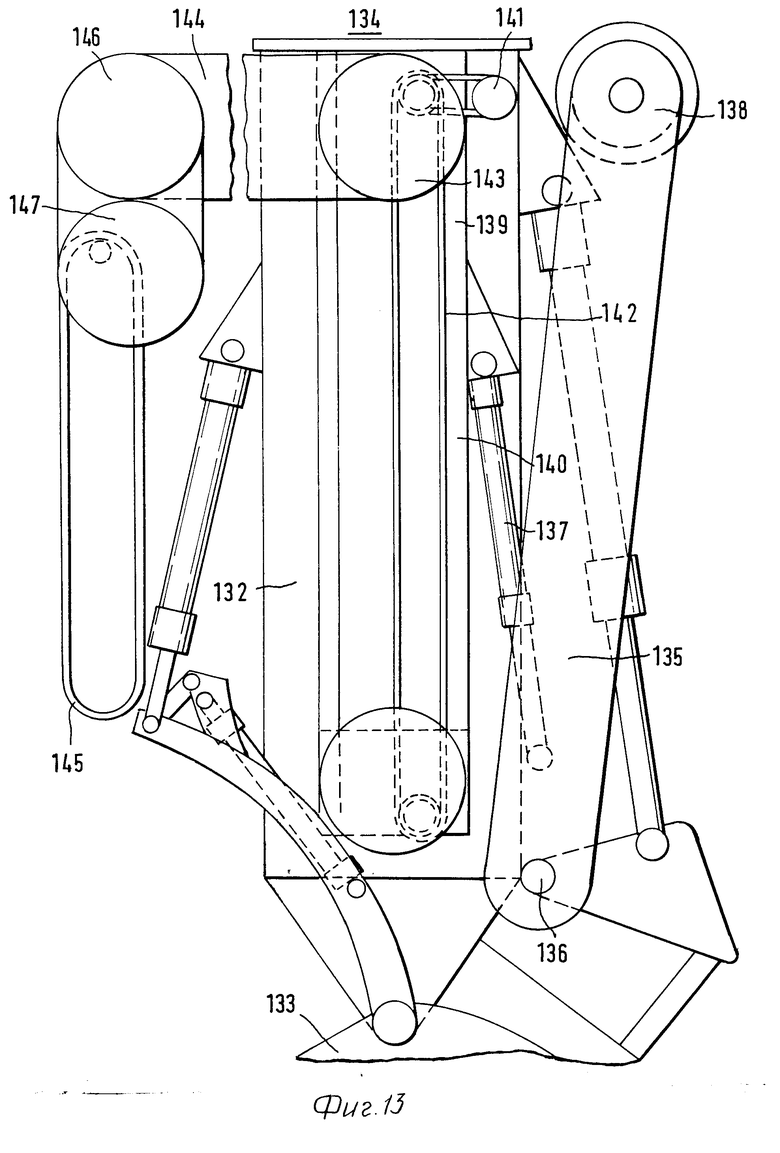
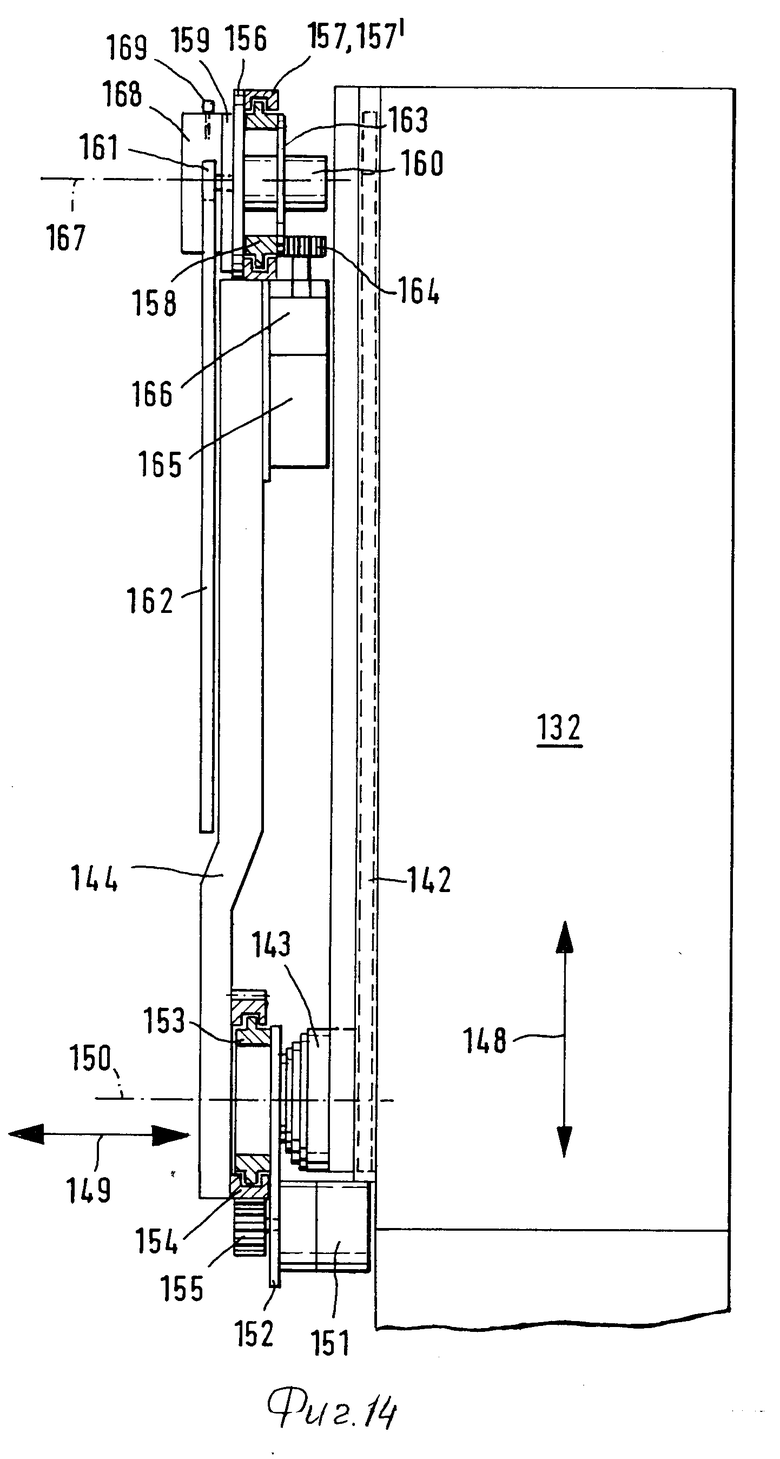
На фиг.13-15 соответственно показывают специальные исполнения нижней части рукояти экскаватора, в особенности оснащение ее дополнительными элементами.
В частности, позицией 132 на фиг.13 обозначена нижняя часть опоры. Вместо землеройного инструмента 133 также может быть предусмотрен любой другой обычный инструмент, например грейфер. В зоне 134 может присоединяться опорно-поворотное соединение.
Позицией 135 обозначен дополнительный вылет, шарнирно закрепленный в точке 136 к узлу (132), причем для поворота дополнительного вылета 135 предусмотрен блок 137 поршень-цилиндр. Дополнительный вылет 135 несет на своем конце, противолежащем точке 136 шарнирного крепления, ходовой ролик 138 и в связи с этим дополнительный вылет 135 может функционально сравниваться с дополнительным вылетом, несущим согласно фиг.9 ходовой ролик (лебедочное колесо 76).
Позицией 139 обозначен ползун, который с возможностью скольжения устанавливается в направляющую 140, имеющую форму ласточкиного хвоста и проходящую в продольном направлении опоры 132. Для привода ползуна 139 вдоль направляющей 140 в виде ласточкиного хвоста служит двигатель 141, взаимодействующий с цепным приводом 142. Цепной привод 142 выполнен в виде циркулирующей цепи, соединенной с ползуном 139. Вместо цепного привода также может быть предусмотрен винтовой привод.
Ползун 139 несет телескопический вылет 143, который может телескопически изменять свою форму перпендикулярно к плоскости изображения фиг.13 преимущественно гидравлически. Однако телескопический вылет 143 может быть также шарнирно закреплен на ползуне 139 с возможностью поворота, причем угол поворота может регулироваться с помощью блока поршень-цилиндр.
К телескопическому вылету 143 присоединяется вылет-стрела 144, несущая на своем, противоположном телескопическому вылету 143 конце цепную пилу 145. Позициями 146, 147 соответственно схематически обозначены служащие для привода цепной пилы двигатель, а также сопряженная с ним передача. Цепная пила 145 вместе с блоком 146 двигатель-передача также может быть присоединена к вылету-стреле 144 при использовании опорно-поворотного соединения, ось которого проходит перпендикулярно плоскости изображения фиг.13. Вылет-стрела 144 может быть выполнена также и телескопической, что позволяет изменять расстояние между двигателем 146 и вылетом 143.
На фиг.14 показан вид сбоку на один из вариантов исполнения вылета-стрелы 144 вместе с инструментом, а также с шарнирным креплением к нижней части 132 опоры в соответствии с фиг.13. Телескопический вылет 143 может перемещаться в направлении стрелки 148 вновь с помощью графически не показанного ползуна при взаимодействии с цепным приводом 142. Точка шарнирного закрепления вылета-стрелы 144 к телескопическому вылету 143 может смещаться в направлении стрелки 149 за счет телескопического изменения длины вылета 143. Дополнительно к этому вылет-стрела 144 может поворачиваться вокруг оси 150 по меньшей мере на 360о. Для осуществления этого поворота служит двигатель 151, преимущественно гидромотор, который конструктивно объединяется с тормозным устройством, например, с пластинчатым тормозом и со своей стороны закреплен на крепежной плите 152. Крепежная плита 152 со своей стороны образует концевое звено телескопического вылета 143 и жестко соединена с этим вылетом. Она одновременно несет внутреннее кольцо 153 подшипника 154 качения, наружное кольцо которого жестко соединено с вылетом-стрелой 144 и снабжено наружным зубчатым ободом, сцепленным с шестерней 155, расположенной на выходном валу двигателя 151.
Позицией 156 обозначена крепежная плита, которая находится на противоположном оси 150 конце вылета-стрелы 144 и с этой стрелой жестко соединена. На крепежной плите 156, а именно на ее обращенной к детали 132 стороне, закреплено наружное кольцо 157 подшипника 157' качения, внутреннее кольцо которого обозначено позицией 158. Внутреннее кольцо жестко соединено с дополнительной крепежной плитой 159, на которой закреплен проходящий внутри внутреннего кольца 158 двигатель 160, на выходном валу которого находится шестерня 161, с помощью которой осуществляется привод цепной пилы 162. Двигатель 160 может быть выполнен любым и конструктивно объединен с тормозным устройством, например с пластинчатым тормозом.
Позицией 163 обозначен зубчатый венец, который находится на противоположной крепежной плите 159 стороне внутреннего кольца 158 и взаимодействует с шестерней 164 двигателя 165, который со своей стороны закреплен на вылете-стреле 144. Позицией 166 снова обозначено тормозное или блокирующее устройство. Двигатель 165 может быть любым, однако преимущественно выполняется в виде гидромотора, например аксиально-поршневого гидромотора. С помощью двигателя 165 возможно вращение цепной пилы вокруг оси 167. Позицией 168 обозначен корпус цепной пилы в зоне шестерни 161 и позицией 169 обозначена распыливающая форсунка для масла или другого смазывающего средства. Вместо форсунки 169 может быть предусмотрено также и другое распыливающее устройство, например распыливающее устройство для хладагента и воды и т.д. Последнее, например, необходимо для алмазных дисков пилы, которые могут быть предусмотрены вместо цепной пилы. Распыливающее устройство соединено с графическим не показанным на чертеже накопительным устройством.
С дополнительным оснащением опоры согласно фиг.13 и 14 становятся достижимы многочисленные дополнительные рабочие процессы, например, в лесном хозяйстве, причем с помощью грейфера может быть захвачено дерево и с помощью пилы оно может быть спилено, а именно при максимально возможном учете вопросов безопасности, а также для того, чтобы избежать повреждения других деревьев вследствие процесса падения (деревьев). Тем самым изобретенное устройство может быть также применено в сельском и лесном хозяйстве и может быть выполнено, например, в виде трелевочной машины.
Однако на стреле в зоне стойки (для инструментов) может быть закреплено большое число различных инструментов и управляющих устройств, при этом всегда речь идет о точном управлении движениями подачи исходя от стационарной точки.
Показанный на фиг. 15 пример исполнения в значительной степени соответствует примеру исполнения по фиг.14. Однако теперь дополнительно представлено соединение между телескопическим вылетом 143 и узлом 132 с помощью дополнительного опорно-поворотного соединения 170. Позицией 171 обозначено наружное кольцо подшипника качения, жестко соединенное с телескопическим вылетом 143, причем наружный зубчатый венец этого кольца находится в зацеплении с шестерней 172 двигателя 173. Внутреннее кольцо 174 этого подшипника качения жестко соединено с ползуном, который может перемещаться в направлении стрелки 148 с помощью цепного привода. Также на этом ползуне закреплен двигатель 173. С помощью двигателя 173 вылет-стрела 144 может быть повернута вокруг оси 150 любым образом. Вновь двигатель 173 может быть оснащен графически неизображенным тормозным или фиксирующим устройством, так что вылет-стрела 144 может быть заблокирована в любых угловых положениях.
Следующее исполнение относится к узлу 132 или к землеройному инструменту. Позицией 175 обозначен блок поршень-цилиндр, поршень которого прямолинейно воздействует на бурильный или ударно-бурильный инструмент 176, прямолинейно смещаемый внутри узла 132 в направлении стрелки 148. Землеройным инструментом в этом случае является ковш 177, ось которого выполнена из двух частей, причем названный инструмент может входить и действовать в промежутке между этими двумя частями (177, 177'').
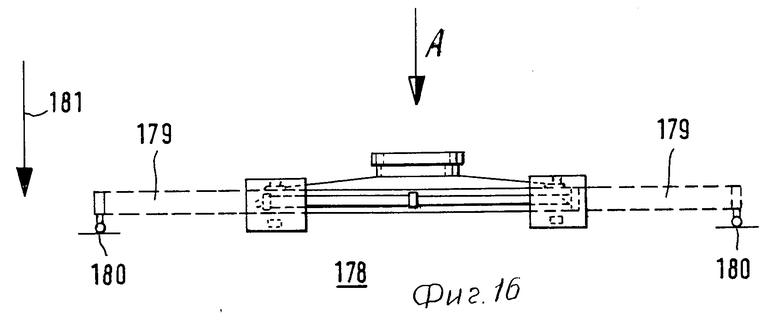
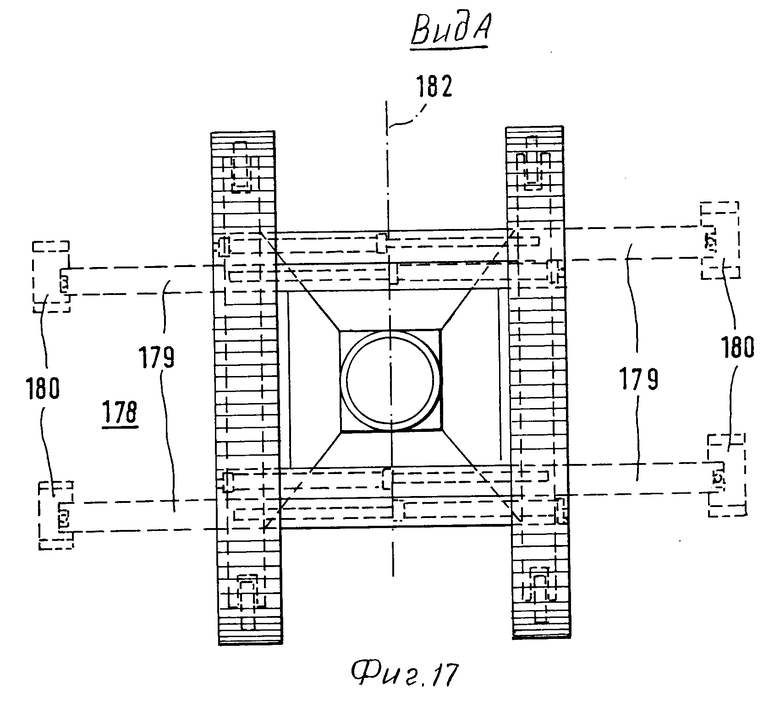
На фиг. 16 и 17 показано исполнение ходовой части экскаватора, а также крана, которое имеет особенное значение в сочетании с телескопическими стрелами и пригодно улучшить защиту от опрокидывания при нежелательных позициях стрелы.
На фиг. 16 и 17 показана гусеничная ходовая часть 178, которая оснащена боковыми, выдвигаемыми в горизонтальной плоскости, соответственно расположенными попарно с некоторым расстоянием опорами 179, которые могут быть подвижными между втянутой позиций, то есть полностью вписанной в контур ходовой части 178, и максимально выдвинутой позицией. Для привода этих опор 179 предусмотрены блоки поршень-цилиндр. Опоры 179 на своих наружных, то есть противоположных гусеничной ходовой части 178 концах несут соответственно опорные лапы 180, оканчивающиеся опорными деталями в виде дисков или пластин и смещаемые вертикально, то есть в направлении стрелки 181 под действием рабочей среды, причем эти лапы в случае необходимости крепятся с возможностью поворота вокруг горизонтальных осей в зоне своих точек крепления к опорам 179.
Соответственно при выдвинутом состоянии опор 179 и при опирающихся на грунт опорных лапах 180 улучшается устойчивость против опрокидывания относительно оси 182.
Система опор 179 и опорных лап 180 может быть расположена также в верхней платформе экскаватора или другого транспортного средства.
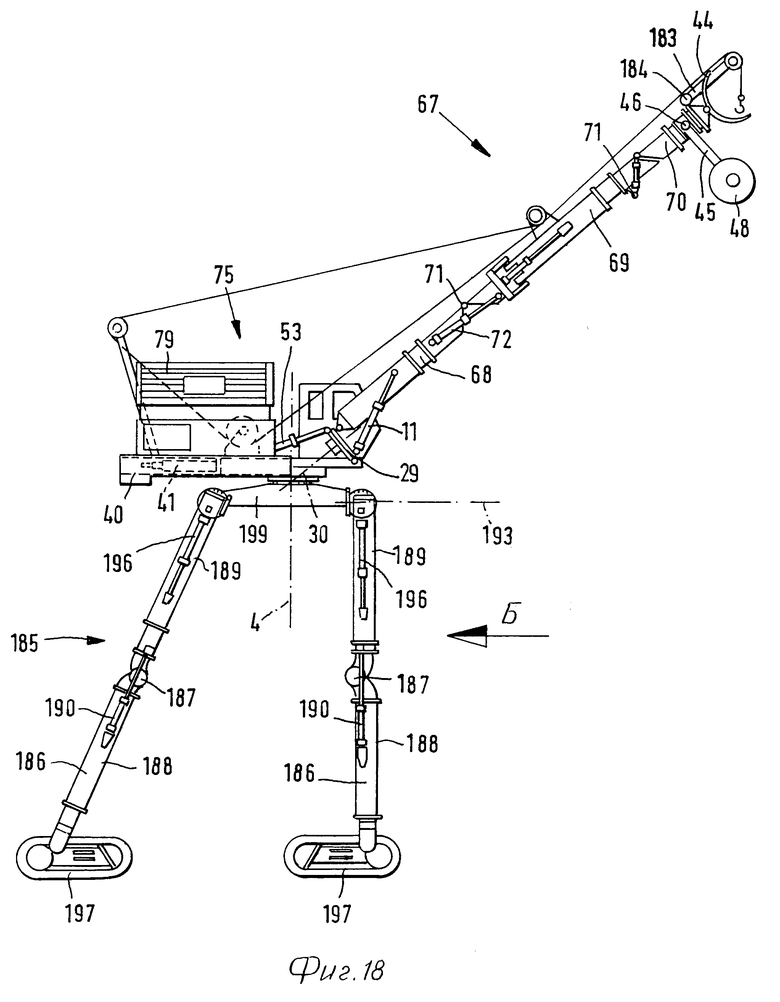
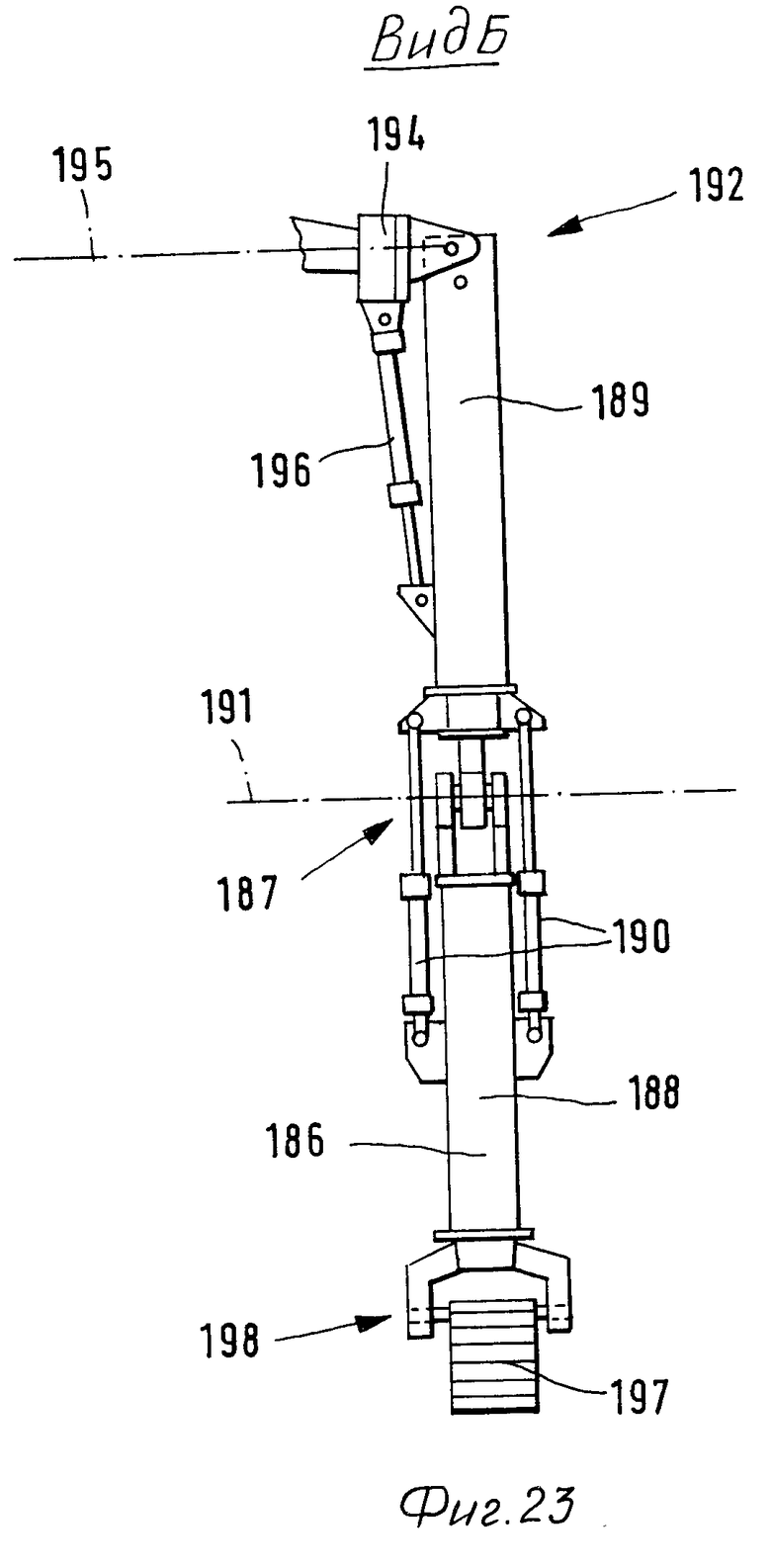
Показанный на фиг. 18 пример исполнения отличается стрелой 68, которая соответствует фиг.9. На конце стойки 70 помещены первый, несущий полотно 48 пилы дополнительный вылет 45, который по меньшей мере может поворачиваться вокруг оси 46, перпендикулярной к плоскости изображения фиг.18, а также другой дополнительный вылет 183, который закреплен с возможностью поворота по меньшей мере вокруг оси 184 и направляет грузоподъемное устройство. Однако транспортное средство 75 характеризуется в отличие от показанного, например, на фиг. 9 модифицированной ходовой частью 185. Для описания ходовой части в последующем дополнительно делается ссылка на графическое изображение в соответствии с фиг.23.
Ходовая часть 185 отличается четырьмя опорами 186, каждая из которых состоит из двух частей 188, 189, шарнирно соединяемых друг с другом в шарнирах 187, оси которых проходят перпендикулярно к плоскости изображения фиг. 18. Опоры (опорные укосины) 186 присоединены к четырем угловым точкам транспортного средства 75. Для поворота в шарнирах 187 с помощью двигателя предусмотрены, соответственно блоки 190 поршень-цилиндр. Согласно фиг.23 блоки 190 поршень-цилиндр находятся по обе стороны каждой опоры 186, а позицией 191 обозначена ось поворота в этих точках шарнирного крепления.
Опоры 186 (опорные укосины), соответственно, каждая через шарнир 192, ось которого проходит перпендикулярно плоскости изображения фиг.23, соединены с транспортным средством 75. Позицией 193 на фиг.18 обозначена ось этого шарнира 192. Шарнир 192 через опорно-поворотное соединение уже описанного вначале вида непосредственно соединен с транспортным средством 75, причем ось этого опорно-поворотного соединения 194 на фиг.23 обозначена позицией 195.
С помощью опорно-поворотных соединений, которые выполнены с приводом от двигателя, возможны поворотные движения опор 186 в плоскости изображения фиг. 18, причем благодаря шарнирам 192 возможны дополнительные поворотные движения перпендикулярно к плоскости изображения фиг.18. Позицией 196 обозначены блоки поршень-цилиндр, которые служат для обеспечения поворотных движений вокруг осей 193.
Каждая опора 186 на своем, противоположном транспортному средству 75 конце несет индивидуальную гусеничную ходовую часть 197, которая может быть также выполнена в виде обычной ходовой части. Соединение гусеничной ходовой части 197 или иной установленной здесь ходовой части с нижним концом соответствующей опоры происходит с помощью графически обозначенного карданного шарнира 198, который делает возможным поворотные движения гусеничной ходовой части 197 вокруг двух перпендикулярных друг другу осей. Вместо карданного шарнира может также рассматриваться сравнимое шарнирное крепление, делающее возможным поворотные движения.
Каждая гусеничная ходовая часть (тележка) 197, а также нижняя часть шасси 199 оснащены соединительными устройствами, которые в значительной степени предназначены и выполнены для того, чтобы было возможно выполнить непосредственное соединение между отдельными ходовыми частями 197 и шасси 199 (транспортного средства) и расположить их таким образом, чтобы было возможно сцепление гусеничных ходовых частей 197 к шасси 199 благодаря поворотам частей 188, 189 отдельных опор. Точное исполнение крепления опор к гусеничным ходовым частям 197 и к шарнирам 192 с другой стороны должно иметь такие размеры, чтобы эти соединения могли быть освобождены с помощью небольших рукояток и, в особенности, при применении сравнительно простого инструмента, причем таким же образом может быть получено соединение между гусеничными ходовыми частями 197 и шасси 199. Это имеет следствием то, что показанное на фиг.18 устройство может быть использовано разнообразным образом, например, в высотном строительстве, мостостроении, например при работах в реках или других водоемах. Одновременно показанное устройство может использоваться также путем поворота опор и соединения гусеничных ходовых частей 197 с шасси 199, как обычный экскаватор или подобное устройство.
Позицией 44 обозначен обычный, закрепленный на конце стойки 70 грейфер. В показанном на фиг. 18 устройстве все ходовые части имеют индивидуальный привод. Соединительные устройства, которые применимы между гусеничными ходовыми частями и шасси 199, могут быть образованы, например, парами элементов из Т-образных направляющих-ползунов.
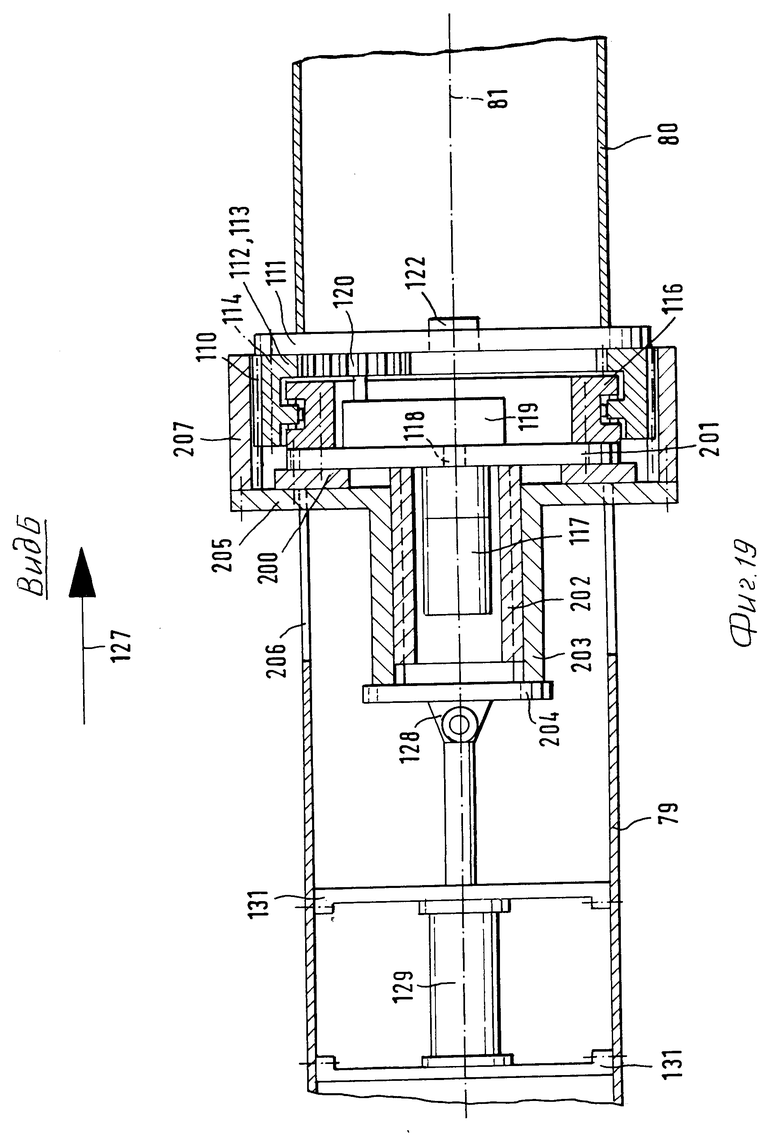
На фиг.19 показан альтернативный вариант опорно-поворотного соединения, который соответствует соединению по фиг.12. Однако это соединение отличается от последнего следующим. Позицией 200 обозначена закрепленная на торце части 79 кольцевая пластина, на противоположной этому торцу стороне которой установлена кольцевая пластина 201, которая также, как и кольцевая пластина 200, проходит коаксиально оси 81, на которой снова закреплено внутреннее кольцо 116 подшипника 113 качения. Круглая пластина 201 функционально соответствует круглой пластине (плите) 115 по фиг.12 и служит для закрепления двигателя 117, который через передачу 119 соединен для работы с шестерней 120. Двигатель 117 находится внутри направляющей трубы 202, которая находится на стороне круглой пластины 201, противоположной передаче 119, и закреплен на этой стороне. Направляющая труба 202 служит направляющей, коаксиальной оси 81, для направляющего цилиндра 203, противоположной круглой пластине 201 конец которого закрыт плитой 204, на которой закреплено соединительное устройство 128, которое обеспечивает соединение с блоком 129 поршень-цилиндр. Тем самым направляющий цилиндр 203 в зависимости от нагружения блока 129 поршень-цилиндр может прямолинейно смещаться по направлению стрелки 127, а также в противоположном к ней направлении.
Для направления направляющего цилиндра 203 без поворота в направляющей трубе 202 предусмотрены соответствующие шпоночные соединения.
На направляющем цилиндре, а именно на его конце, противоположном плите 204, находится система радиальных ребер 205, которые равномерно распределены по окружности и проходят насквозь через соответствующее число проходящих осепараллельно прорезей 206 в часть 79. На радиально наружных концах ребер 205 закреплена цилиндрическая деталь 207, которая функционально соответствует цилиндрической части 108 согласно фиг.12 и несет радиально на внутренней стороне зубчатый венец. Закрепление цилиндрической детали 207 на ребрах может в принципе осуществляться любым способом.
Такое нагружение давлением блока 129 поршень-цилиндр, которое имеет следствием движение плиты 204 и тем самым направляющего цилиндра 203 в направлении, противоположном стрелке 127, освобождает сцепление зубчатых венцов цилиндрической детали 207 и на наружной стороне наружного кольца 112, так что в этом расцепленном состоянии возможен с помощью двигателя 117 при участии устройства 122 для измерения углов (относительный) поворот частей 79, 80. Когда будет достигнуто новое угловое положение, благодаря соответствующему нагружению давлением блока 129 поршень-цилиндр в направлении стрелки 127 вновь восстанавливается сцепление в зубчатом зацеплении 110 и таким образом фиксируется угловая позиция. В отличие от примера исполнения по фиг. 12 во время размыкания сцепления зубчатых венцов движется лишь направляющий цилиндр 203 вместе с цилиндрической деталью 207, а не вся часть 80 или 79 в сборе, так что для размыкания сцепления зубчатых венцов достаточно существенно меньших затрат энергии.
Прорези 206 имеют такие размеры, что они обеспечивают необходимую для размыкания сцепления зубчатых венцов подвижность.
В представленном примере исполнения блок 129 поршень-цилиндр может нагружаться с двух сторон. Равным образом может также использоваться нагруженный односторонне блок поршень-цилиндр, причем в этом случае обязательно должна применяться возвратная пружина, подобно системе согласно фиг.12.
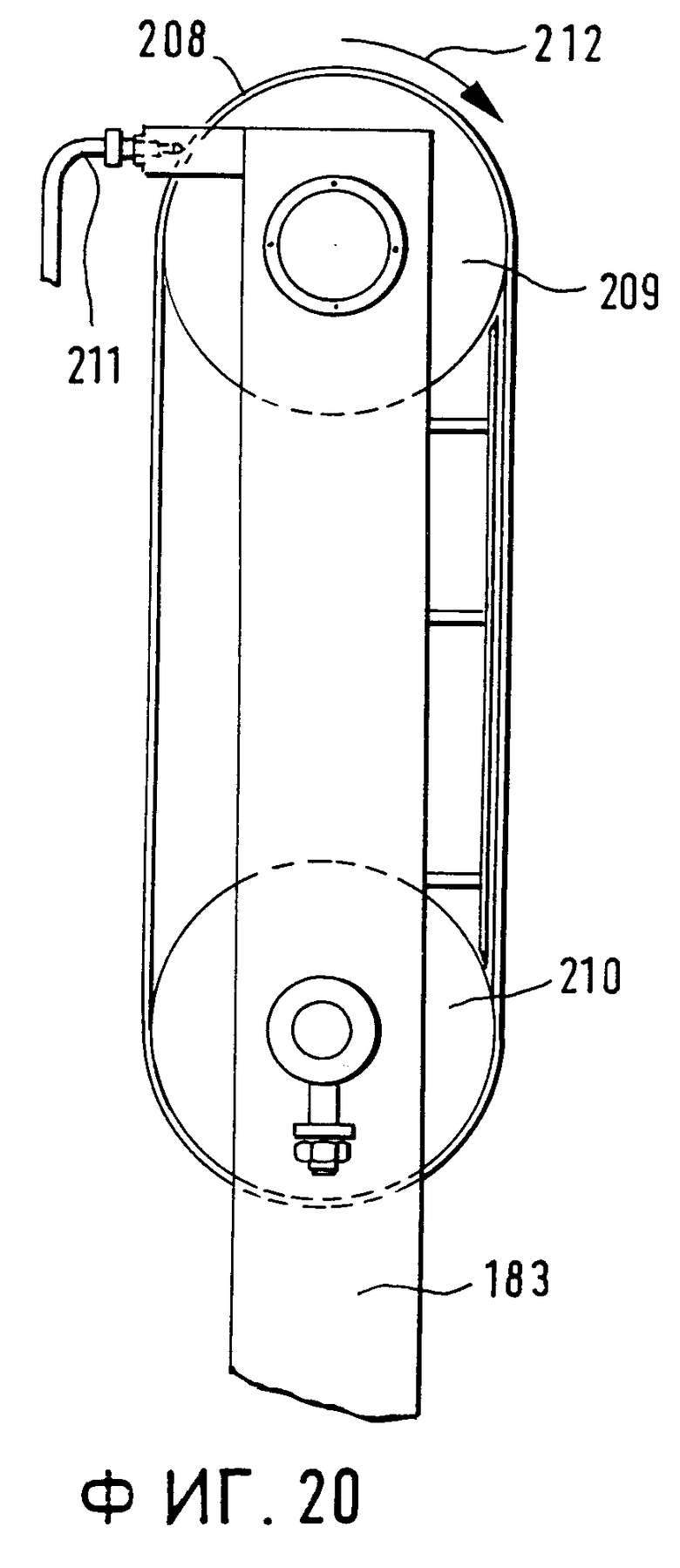
На фиг. 20 показан смонтированный на конце дополнительного вылета 183 инструмент, который может управляться с помощью изобретенного устройства. Инструмент предназначен для нанесения строительного раствора или штукатурки на стены зданий.
Позицией 208 обозначен бесконечный ленточный транспортер (лента), проходящий по роликам 209, 210, служащий в качестве транспортирующего средства для строительного раствора, причем он с помощью вылета 183 должен направляться по возможности параллельно к стене, которую нужно штукатурить. Ленточный транспортер выполнен из материала, к которому не прилипает раствор, кроме того в зоне нанесения предусмотрены графически не показанные, боковые, проходящие параллельно к ограничениям ленты 208 направляющие для слоя раствора.
Позицией 211 обозначена форсунка, через которую раствор наносится на ленту при максимально возможном равномерном распределении. С помощью привода от двигателя один из роликов 209, 210 перемещает ленту 208 в направлении стрелки 212, таким образом в сочетании с соответствующей, параллельной к подлежащей оштукатуриванию поверхности стенки здания направляющей дополнительного вылета 183 осуществляется нанесение раствора.
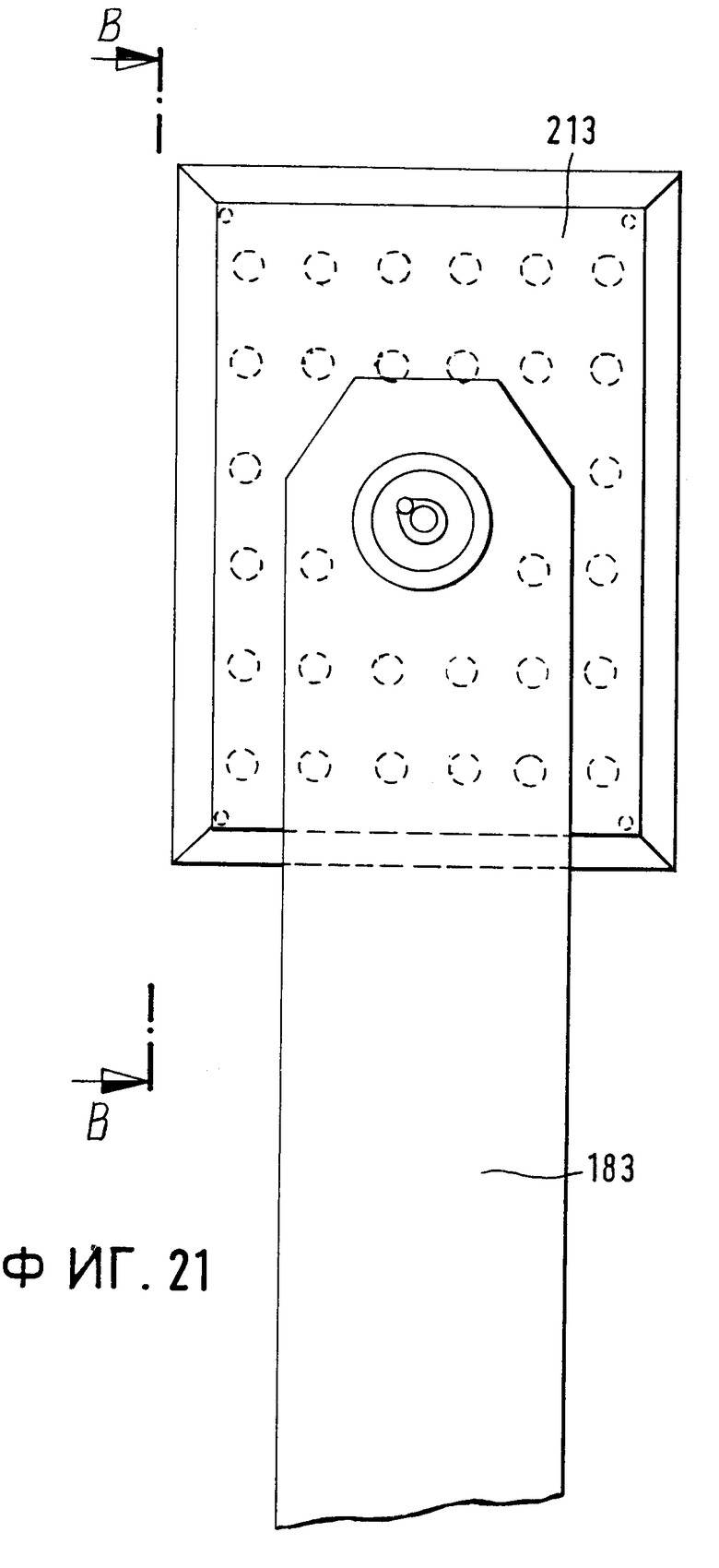
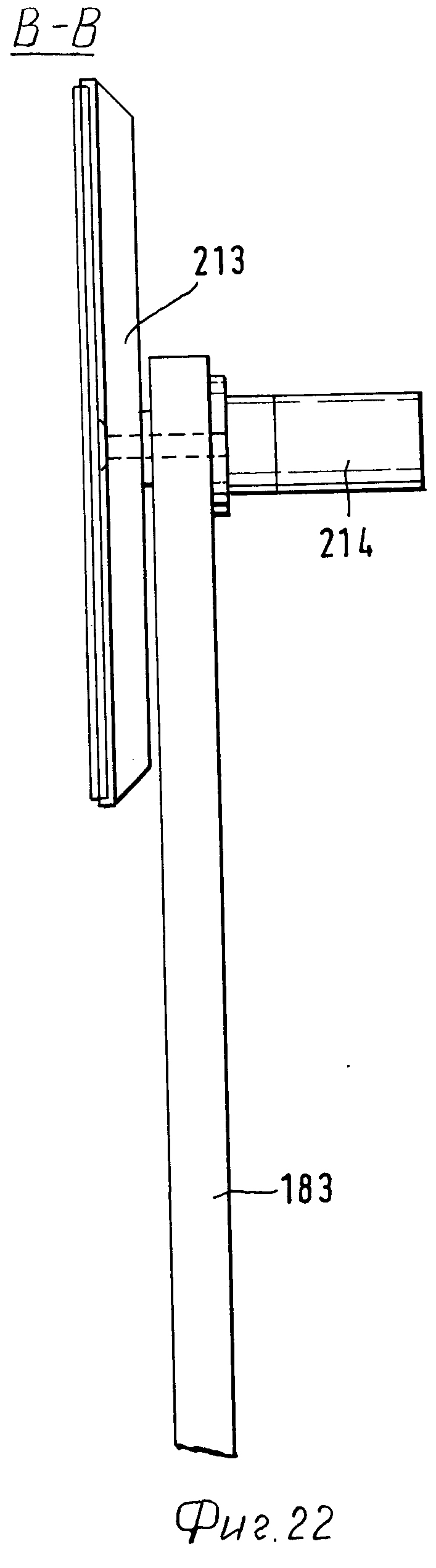
На фиг. 21, 22 показан альтернативный пример исполнения оснащения инструментами дополнительного вылета 183. При этом речь идет об инструменте 213 для сумерфиниширования, система привода которого обозначена позицией 214.
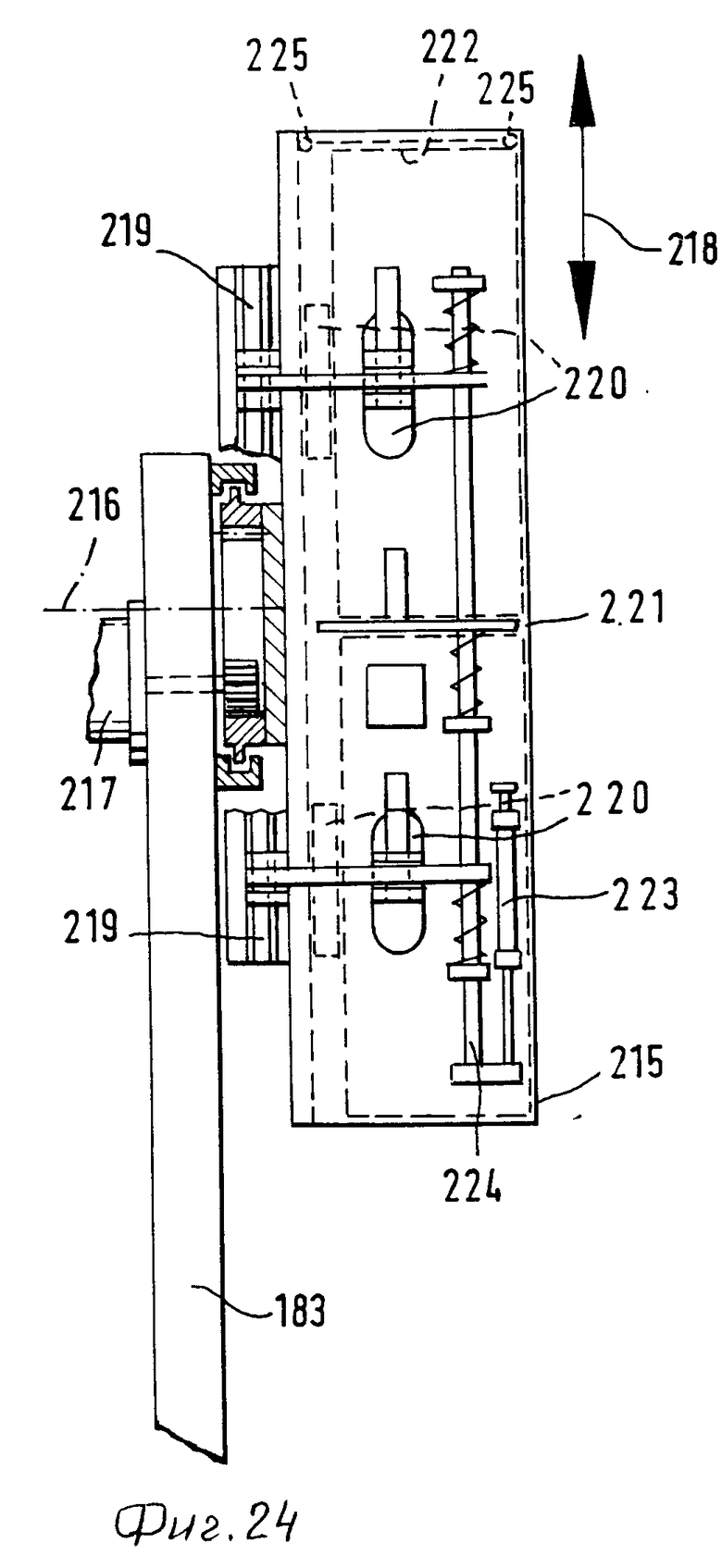
Инструмент, показанный на фиг. 24 и смонтированный на дополнительном вылете 183, является подъемным устройством или манипулятором, которое(ый) выполнено специально для работы, например, с предметами, подобными строительным блокам, например, строительные камни для высотного строительства. С этой целью рама 215 закреплена с возможностью поворота вокруг оси 216 с помощью привода 217. Со своей стороны рама 215 установлена с возможностью смещения также с помощью двигателя прямолинейно в направлении стрелки 218 в отношении к промежуточному держателю 219, причем промежуточный держатель образует непосредственно связующее звено к названной опоре, обеспечивающей возможность поворота. Поворачиваемая опора может быть осуществлена в виде ранее описанного опорно-поворотного соединения.
Для непосредственного захвата названных строительных камней служат всасывающие полости (чаши) 220, которые соответственно захватывают сверху и сбоку подлежащий манипулированию строительный камень. Всасывающие полости 220 соединены с графически не представленным источником вакуума.
В промежутке 221 между изображенными штриховыми линиями двумя строительными камнями 222 расположены прокладки, благодаря которым камни удерживаются на определенном расстоянии друг от друга, причем в этот промежуток 221 может вноситься пригодное связующее, например строительный раствор или соответствующее клеевое вещество.
С помощью блока 223 поршень-цилиндр, который на раме закреплен пригодным образом и который соединен со смещающим устройством 224, может быть осуществлено прямолинейное движение по отношению к удерживаемым строительным камням в направлении стрелки 218, чтобы эти камни можно было установить на уже поставленные камни при определенном давлении прижатия. На вспомогательных устройствах, например для захвата камней 222, могут быть, как показано в месте 225, размещены работающие бесконтактно, фиксирующие расстояние к определенным базовым кромкам датчики, причем может идти речь об ультразвуковой, лазерной или иной системе контроля. Эти датчики соединены с более высоким уровнем управления, содействия точному позиционированию строительных камней 222.
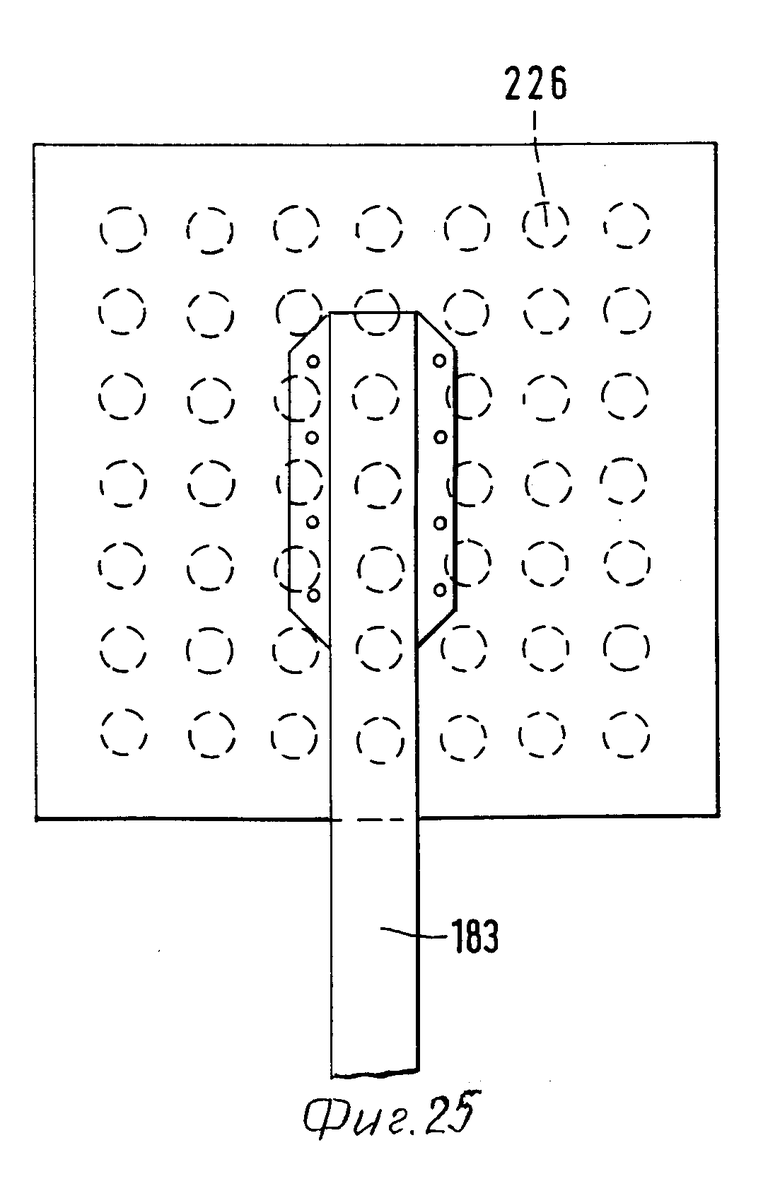
Показанный на фиг.24 инструмент может быть модифицирован любым образом, как показывает фиг. 25, по которому подъемное устройство, также взаимодействующее с источником вакуума, в значительной степени выполнено так, что становится возможным захват на большой площади предметов в виде пластин. Для этого подъемное устройство по фиг.25 выполнено с квадратным расположением всасывающих чаш (полостей) 226 и сверх этого оснащено вновь графически не показанными вспомогательными устройствами для точного захвата и позиционирования подлежащих манипулированию строительных камней.
Другая модификация показанной на фиг.24 системы может заключаться в том, что она выполнена два захвата больше, чем двух строительных камней.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2007 |
|
RU2344240C2 |
| КОНСТРУКЦИЯ ДЛЯ ПОДДЕРЖАНИЯ ТРУБОПРОВОДА ДЛЯ ПРОМЫШЛЕННОЙ МАШИНЫ | 2014 |
|
RU2649185C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| РАБОЧАЯ МАШИНА, В ЧАСТНОСТИ УСТРОЙСТВО ДЛЯ ПЕРЕВАЛКИ МАТЕРИАЛОВ, СО СТРЕЛОЙ, А ТАКЖЕ ОТТЯЖКОЙ СТРЕЛЫ | 2020 |
|
RU2817693C2 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2000 |
|
RU2178382C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |


Использование: землеройно-транспортная техника. Сущность изобретения: объектом является рабочее орудие, оснащенное землеройным инструментом. Оно состоит из стрелы и рукояти, выполненных из звеньев. Стрела выполнена изогнутой и снабжена опорно-поворотным соединением, с помощью которого она разделена на две поворачиваемые друг относительно друга части. Шарнирное крепление стрелы к транспортному средству оснащено дополнительным опорно-поворотным соединением, дополнительным к поворачиваемому шарнирному креплению, являющимся универсальным карданом. С каждым поворотным или вращательным движением сопряжены управляемые независимо друг от друга приводы, так что в результате при стоящем транспортном средстве имеется в распоряжении разносторонне управляемый землеройный инструмент или любой другой инструмент или агрегат. 28 з. п. ф-лы, 25 ил.
| Патент США N 4274797, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
