Изобретение относится к горному и строительному делу. Разработано для расширения области применения гидравлических одноковшовых экскаваторов при рытье повышенной глубины и высоты котлованов, выемок, траншей, сооружения устьев шахтных стволов и при разработке полезных ископаемых открытым способом. При этом предлагаемое рабочее оборудование может быть использовано для работы по грунтам и по выгрузке горных пород, разрушаемых посредством буровзрывных работ.
Гидравлические одноковшовые экскаваторы, оборудованные предлагаемым рабочим оборудованием, могут быть использованы для работ по выемке и погрузке как ниже, так и выше уровня опорной поверхности при изменяющейся глубине и высоте, т.е. с рабочим оборудованием прямая и обратная лопаты с минимальными дополнительными монтажно-демонтажными работами.
Известны конструкции рабочего оборудования одноковшовых гидравлических экскаваторов с прямой и обратной лопатами по «Горнопроходческие машины и комплексы». Грабчак Л.Г. и др. М.: Недра, 1990, с.313; «Машины для земляных работ». / Под ред. Гаркави И.Г. М.: «Высшая школа», 1982, с.132; Гальперин М.И., Домбровский Н.Г. «Строительные машины», М.: «Высшая школа»; 1980, с.212; Беркман И.Л., Ранеев А.В., Рейш А.К. «Универсальные одноковшовые строительные экскаваторы», М.: «Высшая школа», 1981, с.99-101.
Стрела рабочего оборудования как прямой, так и обратной лопат, выполняется изогнутой конструкции с различными углами между продольными осями прямой и удлиняющей (изогнутой) частями. При этом стрелы могут быть как моноблочными, так и состоящими из двух частей: основной (коренной) и удлиняющей (концевой), соединенных между собой жестко. Рукоять обычно прямая моноблочной конструкции. Ковш на конце рукояти может закрепляться жестко или быть поворотным.
К недостаткам следует отнести следующее: обычно каждый тип гидравлического одноковшового экскаватора, оснащенного прямой или обратной лопатами, способен осуществлять выемку горной массы (в том числе и грунтов) на строго определенную глубину или высоту, которые определяются геометрическими размерами стрелы и рукояти; переход работы экскаватора с одного вида рабочего оборудования на противоположный требует значительных по продолжительности и трудоемкости монтажных и демонтажных работ.
Известно рабочее оборудование гидравлического одноковшового экскаватора по RU 209117 U1, представляющее собой обратную лопату для выемки грунтов и горной массы ниже уровня стоянки экскаватора. Рассматриваемое рабочее оборудование состоит из моноблочной стрелы и шарнирно закрепленной на ней телескопически раздвижной рукояти с ковшом, смонтированным на нижнем конце телескопически выдвижной части рукояти.
Основным недостатком рассматриваемого рабочего оборудования является, то что его рукоять имеет сравнительно небольшую телескопическую раздвижность, так как гидродомкрат раздвижки, смонтированный внутри рукояти, размещен между внутренней верхней поверхностью наружной и верхним внутренним концом телескопически выдвижной части.
Второй недостаток заключается в том, что при работе экскаватора нагрузки при внедрении ковша от изгибающего и крутящего моментов воспринимаются опорными направляющими роликами с небольшими площадями контактов и большими нагрузками на их оси. В результате чего такое сопряжение является недостаточно надежными в тяжелых условиях работы экскаватора.
Известно также рабочее оборудование прямой или обратной лопат по RU 2236510 С1, которое имеет моноблочную изогнутую стрелу и поворотную рукоять с ковшом. Рукоять рассматриваемого оборудования состоит из кронштейна, шарнирно закрепленного на стреле и имеющего механизм поворота, и трубчатой поворотной части со смонтированным на ее нижнем конце поворотным ковшом. Рабочее оборудование может производить выемку грунтов и горной массы как ниже уровня стоянки экскаватора, так и выше посредством перехода с обратной на прямую лопату с малыми затратами на перестановку гидродомкрата для поворота рукояти.
Рассматриваемое оборудование предназначено для выемки грунтов и горной массы на глубину и высоту, ограничиваемую конструктивными параметрами стрелы и рукояти, и не может быть использовано для образования выемок и уступов повышенной глубины и высоты.
Наиболее близким по конструктивному исполнению и назначению является рабочее оборудование, известное по а.с. СССР № 759658, Е02F 3/38 «Рабочее оборудование гидравлического экскаватора» и состоящее из стрелы и телескопически раздвижной рукояти с ковшом. При этом сочленение между внутренней телескопически выдвижной частью с наружной выполнено в виде фланца с шариками и винтовыми канавками на внешней поверхности внутренней телескопически выдвижной части. Оборудование предназначено для работы в качестве прямой и обратной лопат с возможностью изменения высоты и глубины копания.
Рассматриваемое оборудование обладает целым рядом недостатков, которые делают его непригодным к практическому применению.
К ним относятся:
- рабочее оборудование любых типов экскаваторов при выемке горной массы из забоя подвергается сильному засорению пылью и мелкими частицами породы. Винтовые канавки при работе будут засоряться и требуется тщательный уход за их состоянием. Такое соединение будет быстро изнашиваться;
- незначительная телескопическая раздвижность, обусловленная тем, что гидродомкрат телескопической раздвижки размещен между верхней внутренней поверхностью наружной и верхней поверхностью внутренней телескопически выдвижной частями рукояти;
- размеры по длине рукояти любого типа гидравлических одноковшовых экскаваторов всегда согласовываются с общей линейной длиной стрелы рабочего оборудования, так как при подъеме рабочего оборудования из котлована или траншеи рукоять с ковшом должна вписаться в габариты стрелы с возможностью дальнейшего поворота экскаватора. В рассматриваемом оборудовании это невозможно выполнить, так как уменьшение длины телескопической рукояти приведет к вращению внутренней части совместно с ковшом и его преждевременной разгрузке непосредственно в забой. Такой же недостаток будет наблюдаться и при работе прямой лопатой с разгрузкой в транспортное средство;
- при внедрении ковша в грунт или горную массу по длине его режущей кромки возникают различные по величине сопротивления. В результате действия повышенного сопротивления ковш совместно с телескопически выдвижной частью, штоком и поршнем гидродомкрата телескопической раздвижки из-за отсутствия ограничителя повороту повернется на какой-то угол и ковш будет внедряться в забой не только передней (режущей) частью, но и боковой поверхностью, что приведет к значительному возрастанию сопротивления;
- при внедрении ковша в забой с телескопически раздвинутой рукоятью в месте сопряжения наружной и внутренней телескопически выдвижной частью действует значительный по величине изгибающий момент, который будет восприниматься точечными контактами шариков с гнездами и винтовыми канавками. Эти места контактов расположены в одной плоскости, перпендикулярной продольной оси. В местах контакта возникнут напряжения, значительно превосходящие упругие деформации и переходящие в пластические. Результат - выход из строя (поломка) сопряжения.
На основании вышеизложенного имеется необходимость в разработке работоспособной конструктивной схемы универсального рабочего оборудования для прямой и обратной лопат с возможностями получения более глубоких выемок, траншей и котлованов, а также работы по выемке в уступах с переменной высотой с минимальным объемом монтажно-демонтажных работ при переходе с одного вида рабочего оборудования на другой.
Задачей настоящего изобретения является разработка универсального рабочего оборудования для прямой и обратной лопат гидравлических одноковшовых экскаваторов для рытья котлованов, траншей, выемок различного назначения и добычи полезных ископаемых открытым способом. Разрабатываемое рабочее оборудование должно обеспечить выемку грунта и добычу полезных ископаемых на большую глубину и высоту копания по сравнению с обычными с высокой надежностью работоспособности.
Согласно изобретению, поставленная задача достигается тем, что рабочее оборудование прямой или обратной лопат гидравлических одноковшовых экскаваторов, включающее изогнутую моноблочную стрелу, шарнирно связанную с ней телескопически раздвижную рукоять, состоящую из кронштейна, основной и телескопически выдвижной частей со смонтированным на внешнем конце последней поворотным ковшом; гидродомкраты для поворота стрелы, рукояти и ковша, а также гидродомкрат телескопической раздвижки и механизм поворота основной и телескопически выдвижной частей рукояти. При этом размещенная внутри кронштейна основная часть рукояти выполнена в виде трубчатой конструкции. Предлагаемое рабочее оборудование отличается тем, что телескопически выдвижная часть рукояти выполнена трубчатой, механизм поворота выполнен с приводом в виде реечного гидродомкрата, а основная и телескопически выдвижная части рукояти по всей длине телескопической раздвижки связаны между собой шлицевым соединением с фиксацией положения прямой или обратной лопаты посредством привода механизма поворота рукояти. При этом проушина для шарнирного соединения гидродомкрата поворота ковша с телескопически выдвижной частью рукояти установлена с возможностью перемещения в продольном пазу, выполненном в основной части рукояти на длину телескопической раздвижки. Цилиндр гидродомкрата телескопической раздвижки рукояти связан с верхней внутренней поверхностью кронштейна посредством одинарного шарнира, а шток поршня гидродомкрата раздвижки присоединен к нижней внутренней поверхности телескопически выдвижной части рукояти посредством шарового шарнира, исключающего поворот поршня гидродомкрата телескопической раздвижки рукояти при повороте основной и телескопически выдвижной частей рукояти на угол 180° в процессе изменения вида рабочего оборудования.
Существенными отличиями являются:
1. Рабочее оборудование прямой и обратной лопат гидравлических одноковшовых экскаваторов, включающее изогнутую моноблочную стрелу и шарнирно связанную с ней телескопически раздвижную рукоять со смонтированным на ее внешнем конце поворотным ковшом, гидродомкраты поворота стрелы, рукояти, ковша и телескопической раздвижки имеют рукоять, состоящую из кронштейна, основной и телескопически выдвижной частей, выполненных в виде трубчатых конструкций, входящих одна в другую. Все три части рукояти соединены между собой кинематической связью посредством механизма поворота с приводом от реечного гидродомкрата основной и телескопически выдвижной частей на угол 180°; гидродомкрата телескопической раздвижки, размещенного внутри телескопически выдвижной части и обеспечивающего максимальную телескопичность; шлицевого или шпоночного соединения между основной и телескопически выдвижной частями, обеспечивающего непрерывный контакт по длине раздвижки. Фиксация положения прямая или обратная лопаты осуществляется приводом поворотного механизма рукояти.
2. Поворот ковша, смонтированного на внешнем конце телескопически выдвижной части рукояти, осуществляется посредством гидродомкрата ковша, шарнирно закрепленного на внешней стороне телескопически выдвижной части. При этом проушина шарнира гидродомкрата имеет возможность перемещения в продольном пазу основной части рукояти на длину телескопической раздвижки.
3. Гидродомкрат телескопической раздвижки рукояти своим цилиндром присоединен одинарным (простым) шарниром к верхней внутренней поверхности кронштейна рукояти, а штоком соединен с нижней внутренней поверхностью телескопически выдвижной части посредством шарового шарнира, позволяющего исключить поворот поршня гидродомкрата раздвижки при повороте основной и телескопически выдвижной частей рукояти при переходе одного вида рабочего оборудования на другой.
Сущность изобретения поясняется чертежами.
Фиг.1. Общая конструктивная схема рабочего оборудования прямой или обратной лопат с телескопически раздвижной рукоятью гидравлических одноковшовых экскаваторов.
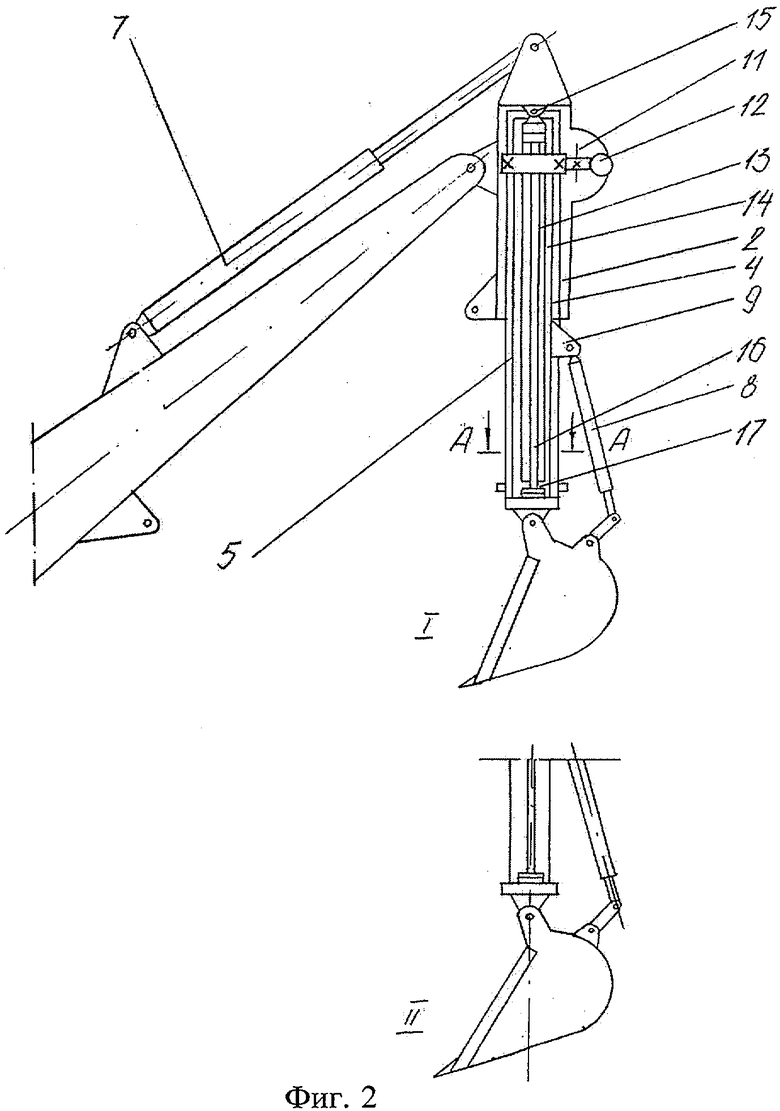
Фиг.2. Кинематические схемы поворотного механизма и телескопической раздвижки рукояти.
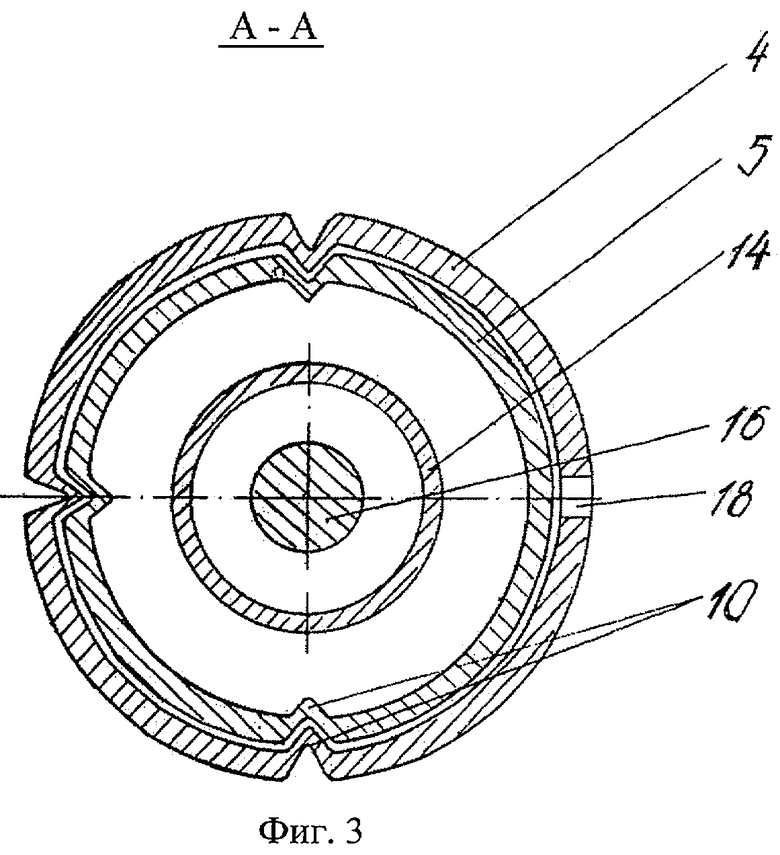
Фиг.3. Поперечный разрез трубчатой части рукояти.
На фиг.1 представлена общая конструктивная схема рабочего оборудования прямой или обратной лопат с телескопически раздвижной рукоятью гидравлических одноковшовых экскаваторов. Оно состоит из моноблочной изогнутой стрелы 1, на верхнем конце которой шарнирно смонтирована поворотная телескопически раздвижная рукоять 2, включающая кронштейн 3, основную 4 и телескопически выдвижную 5 части трубчатой конструкции. На внешнем конце телескопически выдвижной части 5 шарнирно смонтирован поворотный ковш 6. Поворот телескопически раздвижной рукояти 2 вокруг оси шарнира стрелы 1 в вертикальной плоскости осуществляется при помощи гидродомкрата 7, а поворот ковша 6 вокруг оси шарнира телескопически выдвижной части 5 - посредством гидродомкрата 8, смонтированного на проушине 9. Сопряжение между основной 4 и телескопически выдвижной 5 частями выполнено в виде прокатанного шлицевого 10 или шпоночного соединения.
Изменение вида рабочего оборудования с обратной лопаты на прямую (из положения I в положение II) осуществляется при помощи поворотного механизма 11, а гидродомкрат 7, при этом, переставляется из положения III в положение IV.
На фиг.2 представлены кинематические схемы поворотного механизма и телескопической раздвижки рукояти. Механизм поворота 11 имеет в качестве привода реечный гидродомкрат 12. Телескопическая раздвижка рукояти 2 осуществляется при помощи гидродомкрата раздвижки 13, размещенного внутри телескопически выдвижной части 5 рукояти. Такой способ размещения гидродомкрата позволяет осуществить максимальную величину телескопической раздвижки рукояти 2. При этом гидродомкрат раздвижки 13 своим цилиндром 14 одинарным шарниром 15 присоединен к верхней внутренней поверхности кронштейна 3 рукояти, а штоком 16 соединен с нижней внутренней поверхностью телескопически выдвижной части 5 посредством шарового шарнира 17, позволяющего устранить поворот штока с поршнем гидродомкрата раздвижки 13 при изменении одного вида рабочего оборудования на другой. На фиг.2 представлено рабочее оборудование с обратной лопатой в двух положениях: I - при работе по выемке грунтов ниже уровня стоянки экскаватора на обычную для определенного типа экскаватора глубину - рукоять в сдвинутом положении; II - при выемке грунтов в процессе образования выемок повышенной глубины - рукоять в телескопически раздвинутом положении.
Таким же образом будет изменяться длина рукояти при выемке грунта или горной массы выше стоянки экскаватора с рабочим оборудованием прямая лопата в процессе работы в уступах с изменяющейся высотой.
На фиг.3 в поперечном сечении А-А (фиг.2) трубчатой рукояти представлено одно из возможных сопряжений основной 4 и телескопически выдвижной 5 частей. Оно представляет собой шлицевое соединение, получаемое способом прокатки. Такое сопряжение обеспечивает свободное продольное перемещение телескопически выдвижной части 5 относительно основной части 4 рукояти и осуществляет их совместный поворот при изменении вида рабочего оборудования, а также обеспечивает жесткость конструкции для восприятия усилий от изгибающего и крутящего моментов, возникающих при копании. При телескопической раздвижке рукояти проушина 9, предназначенная для шарнирного соединения домкрата поворота 8 с телескопически выдвижной частью 5 ковша 6, перемещается в продольном пазу 18, выполненном в основной части 4 рукояти 2.
Принцип работы рабочего оборудования с прямой или обратной лопатой.
В процессе рытья котлованов, траншей и др. выемок повышенной глубины путем постепенной телескопической раздвижки рукояти осуществляется углубление. При этом, при подъеме рабочего оборудования из забоя одновременно с подъемом осуществляется втягивание телескопически выдвижной части с последующим поворотом экскаватора к месту разгрузки. При работе прямой лопатой в уступах повышенной высоты, телескопическая раздвижка рукояти осуществляется ближе к концу копания для срезания верхней части уступа. Для осуществления выгрузки в транспортное средство одновременно с поворотом платформы экскаватора производится втягивание телескопической части рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2380542C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2362878C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА С РЫЧАЖНЫМ РАБОЧИМ ОБОРУДОВАНИЕМ | 2008 |
|
RU2377408C1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1979 |
|
SU897967A1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА | 2009 |
|
RU2418169C1 |
Изобретение относится к области горного дела и строительства и предназначено для расширения области работы экскаваторов по выемке грунтов и полезных ископаемых при повышенной глубине и высоте различных выемок и карьеров. Техническая задача - получение более глубоких выемок, траншей и котлованов, а также работы по выемке в уступах с переменной высотой с минимальным объемом монтажно-демонтажных работ при переходе с одного оборудования на другое. Рабочее оборудование прямой или обратной лопат включает изогнутую моноблочную стрелу и связанную с ней шарнирно телескопически раздвижную рукоять, которая состоит из кронштейна, основной и телескопически выдвижной частей со смонтированным на внешнем конце последней поворотным ковшом, гидродомкраты поворота стрелы, рукояти и ковша, а также гидродомкрат телескопической раздвижки и механизм поворота основной и телескопически выдвижной частей рукояти. Размещенные внутри кронштейна рукояти основная и телескопически выдвижная части выполнены в виде трубчатых конструкций, входящих одна в другую. Механизм поворота выполнен с приводом в виде реечного домкрата, основная и телескопически выдвижная части рукояти по всей длине телескопической раздвижки связаны между собой шлицевым соединением с фиксацией положения прямой или обратной лопаты посредством привода механизма поворота рукояти, а проушина для шарнирного соединения домкрата поворота ковша с телескопически выдвижной частью рукояти установлена с возможностью перемещения в продольном пазу, выполненном в основной части рукояти на длину телескопической раздвижки. При этом цилиндр гидродомкрата телескопической раздвижки рукояти связан с верхней внутренней поверхностью кронштейна посредством одинарного шарнира, а шток поршня гидродомкрата телескопической раздвижки рукояти присоединен к нижней внутренней поверхности телескопически выдвижной части рукояти посредством шарового шарнира, исключающего поворот поршня домкрата телескопической раздвижки рукояти при повороте основной и телескопически выдвижной частей рукояти на угол 180° в процессе изменения вида рабочего оборудования. 3 ил.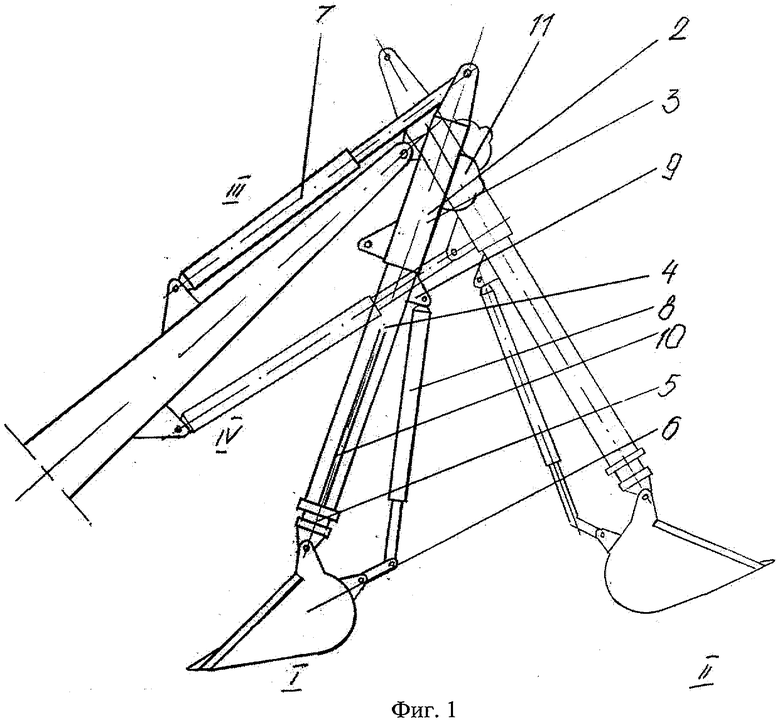
Рабочее оборудование прямой или обратной лопат гидравлического одноковшового экскаватора, включающее изогнутую моноблочную стрелу и связанную с ней шарнирно телескопически раздвижную рукоять, состоящую из кронштейна, основной и телескопически выдвижной частей со смонтированным на внешнем конце последней поворотным ковшом, гидродомкраты поворота стрелы, рукояти и ковша, а также гидродомкрат телескопической раздвижки и механизм поворота основной и телескопически выдвижной частей рукояти, при этом размещенная внутри кронштейна основная часть рукояти выполнена в виде трубчатой конструкции, отличающееся тем, что телескопически выдвижная часть рукояти выполнена трубчатой, механизм поворота выполнен с приводом в виде реечного домкрата, основная и телескопически выдвижная части рукояти по всей длине телескопической раздвижки связаны между собой шлицевым соединением с фиксацией положения прямой или обратной лопаты посредством привода механизма поворота рукояти, а проушина для шарнирного соединения домкрата поворота ковша с телескопически выдвижной частью рукояти установлена с возможностью перемещения в продольном пазу, выполненном в основной части рукояти на длину телескопической раздвижки, при этом цилиндр гидродомкрата телескопической раздвижки рукояти связан с верхней внутренней поверхностью кронштейна посредством одинарного шарнира, а шток поршня гидродомкрата телескопической раздвижки рукояти присоединен к нижней внутренней поверхности телескопически выдвижной части рукояти посредством шарового шарнира, исключающего поворот поршня домкрата телескопической раздвижки рукояти при повороте основной и телескопически выдвижной частей рукояти на угол 180° в процессе изменения вида рабочего оборудования.
| SU 759658 А, 02.09.1980 | |||
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА К ЭКСКАВАТОРУ-ПЛАНИРОВЩИКУ | 0 |
|
SU319682A1 |
| РУЧНОЙ ВИНТОРЕЗНЫЙ СТАНОК | 1929 |
|
SU20917A1 |
| ЭКСКАВАТОР-ПЛАНИРОВЩИК С ТЕЛЕСКОПИЧЕСКИМ СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 1994 |
|
RU2072020C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |

