Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемной технике.
Известно устройство для поворота и изменения вылета стрелы крана, содержащее основание, раму, шарнирно установленные на ней под углом друг к другу гидроцилиндры, штоки которых шарнирно соединены между собой и со стрелой, установленной на раме поворотной в горизонтальной плоскости оси с возможностью поворота в вертикальной плоскости, в котором, с целью расширения зоны действия и снижения динамических нагрузок, рама выполнена в виде Т-образной формы, на концах горизонтальной перекладины которой закреплены корпуса гидроцилиндров, а вертикальная стойка фермы выполнена пустотелой для закрепления внутри нее поворотной оси, при этом форма установлена на основании с возможностью поворота в горизонтальной плоскости посредством дополнительного привода, взаимодействующего с наружной поверхностью вертикальной стойки; дополнительный привод выполнен в виде гидровинтового механизма, включающего закрепленную на наружной поверхности вертикальной стойки Т-образной формы обойму и размещенный внутри нее поршень с центральным отверстием, охватывающим вертикальную стойку, установленный с возможностью перемещения вдоль оси последней, зафиксированный от поворота вокруг нее и взаимодействующий с ней посредством винтовой нарезки, выполненной на сопрягаемых поверхностях поршня и стойки (SU, авторское свидетельство, N 1813697, МПК5 B 66 C 23/82. Устройство для поворота и изменения вылета стрелы крана // Герасун В. М. , Карсаков А. А. , Пындак В.И., Рогачев А.Ф., Строков В.Л. Заявлено 11.03.1991, опубликовано 07.05.1993).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относятся ограниченная зона обслуживания в горизонтальной плоскости и сложность конструкции дополнительного привода.
Наиболее близким устройством того же назначения к заявленному объекту по совокупности признаков является манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоять с грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью и механизм поворота опорно-поворотной колонки, включающий в себя гидроприводы управления этой колонкой (см. Навесной манипулятор "Волгоградский" // Инф. листок Волгоградского ЦНТИ N 230 - 97. Составили: В.М. Герасун, В.И. Пындак, А.Ф. Рогачев. - Волгоград, 1997. - 4 с.).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, принятого за ближайший аналог, относятся ограниченная зона обслуживания в горизонтальной плоскости шарнирно-сочлененной стрелы и рукояти и неудовлетворительные динамические и кинематические характеристики механизма поворота.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - расширение зоны обслуживания.
Технический результат - повышение диапазона углов поворота стрелы и вылета рукояти, упрощение конструкции и снижение динамических нагрузок на крайних участках поворота колонки.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном манипуляторе, содержащем основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированной на ней стрелой, рукоять с грузозахватным крюком, гидроприводы управления стрелой и рукоятью и механизм поворота опорно-поворотной колонки, включающий в себя гидроприводы управления этой колонкой, в заявленном манипуляторе согласно изобретению основание снабжено неподвижной опорой и выполнено в виде полого цилиндра, имеющего ориентированные в радиальных плоскостях и ортогонально установленные к оси цилиндра нижние балки, в которых установлены упомянутые выдвижные опоры, при этом угол раствора нижних балок меньше 180o, опорно-поворотная колонка выполнена в виде полой штанги, а механизм поворота снабжен двуплечим рычагом, кинематически связанным с упомянутыми гидроприводами управления механизма поворота, при этом двуплечий рычаг установлен свободно на вертикальной оси поворота опорно-поворотной колонки, а гидроцилиндры упомянутых гидроприводов ориентированы разнонаправленно и соединены своими штоками с кронштейнами, один из которых закреплен на основании, а другой - на опорно-поворотной колонке; неподвижная опора установлена соосно основанию и размещена в его донной части; угол раствора нижних балок определяется по формуле
γ = 2π-α,
где α - угол поворота опорно-поворотной колонки;
верхняя часть основания закрыта заглушкой, выполненной в виде диска, соединенного с торцевой частью основания сварным швом, а в донной части основания установлен фланец, соединенный с этим основанием герметичным кольцевым швом; на полом цилиндре основания установлена верхняя балка, расположенная также как нижние балки в радиальной плоскости и ортогонально к оси упомянутого цилиндра основания, причем проекция верхней балки размещена по середине между нижними балками, на нижних балках попарно установлены образующие нижние кронштейны навески плиты с парами соосных втулок, а верхняя балка снабжена образующей верхний кронштейн парой щек с соосными втулками; для фиксации требуемых положений выдвижных опор в нижних балках и опорах выполнены соосные отверстия для съемных пальцев; стрела выполнена в виде толстостенной трубы и имеет кронштейны, один из которых установлен в диаметральном позу на торце стрелы для соединения с рукоятью, а другие - попарно установлены под углом к оси стрелы и имеют втулки для соединения с основаниями гидроприводов управления стрелой и рукоятью, и установленные на другом конце стрелы соосные втулки; рукоять выполнена из полого профиля, предпочтительно круглого сечения; рукоять выполнена составной, снабженной разнодлинными и разнотолщинными профилями; упомянутые сопрягаемые профили размещены в полости рукояти; упомянутые профили размещены на наружной поверхности рукояти; рукоять снабжена подвижными частями в виде взаимно сопрягаемых профилей, на свободном конце соответствующей подвижной части установлен грузозахватный крюк; подвижные части в полости рукояти зафиксированы съемными пальцами; свободные концы подвижных частей рукояти снабжены ручками для перемещения этих частей и ограничителями их предельных смещений; грузозахватный крюк рукояти установлен в траверсе, которая размещена на подвесе, установленном на оси в полости соответствующей подвижной части рукояти; каждая выдвижная опора образована балкой с наклонной и горизонтальной частями, снабженными соединяющим их ребром жесткости, выполненным в виде диска, а со стороны нижнего косого среза каждая балка снабжена лапой и соединена с последней косынками; лапа опоры снабжена отверстиями; диск ребра жесткости балки опоры выполнен с фасонным отверстием для образования ручки; каждая нижняя балка на торце выполнена с диаметрально ориентированными прорезями под упомянутый диск ребра жесткости балки этой опоры для его перестановки в упомянутых прорезях для фиксации транспортного и рабочего положений выдвижной опоры.
За счет того, что нижние балки выполнены с углом раствора меньше 180o, основание снабжено дополнительной опорой, стрела выполнена телескопической, а механизм поворота опорно-поворотной колонки размещен на вершине основания, достигается вышеуказанный технический результат.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителями не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию "изобретательского уровня" заявители провели дополнительный поиск неизвестных решений с целью выявления признаков, совпадающих с отличительными от ближайшего аналога признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителями, не выявлено влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение технического результата.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень" по действующему законодательству.
Изобретение поясняется чертежами.
На фиг. 1 схематично представлен в аксонометрическом изображении заявленный манипулятор.
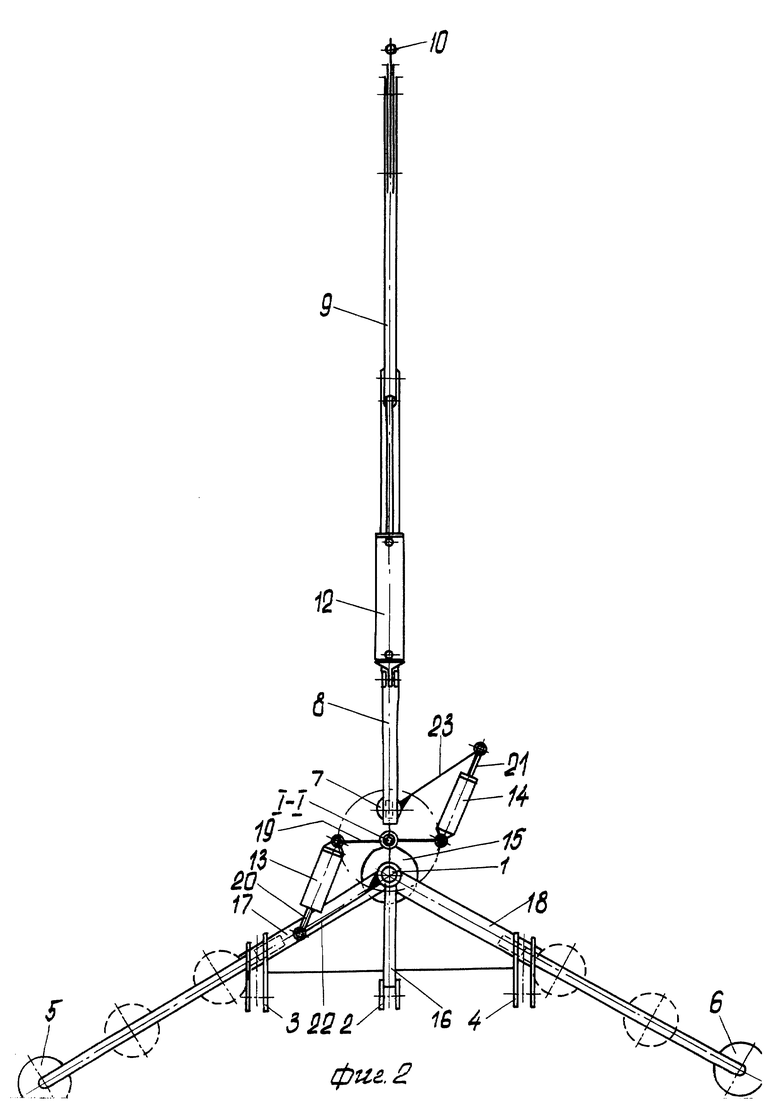
На фиг. 2 - то же, вид в плане (стрела и рукоять с грузозахватным крюком размещены в продольно-вертикальной плоскости).
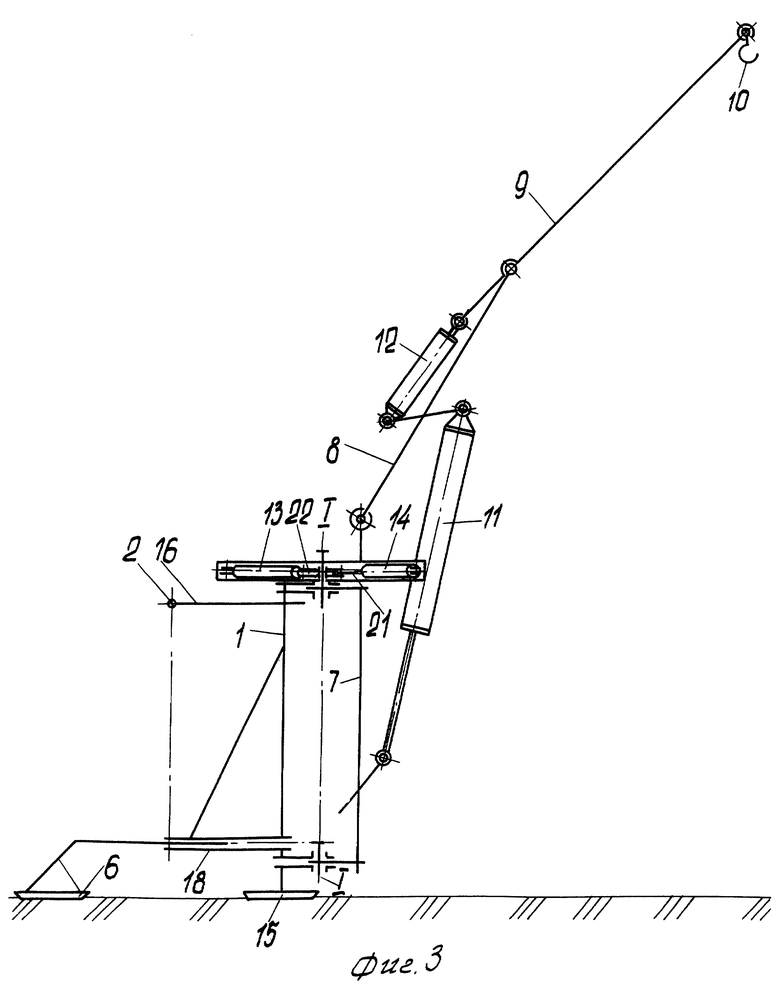
На фиг. 3 - то же, вид слева.
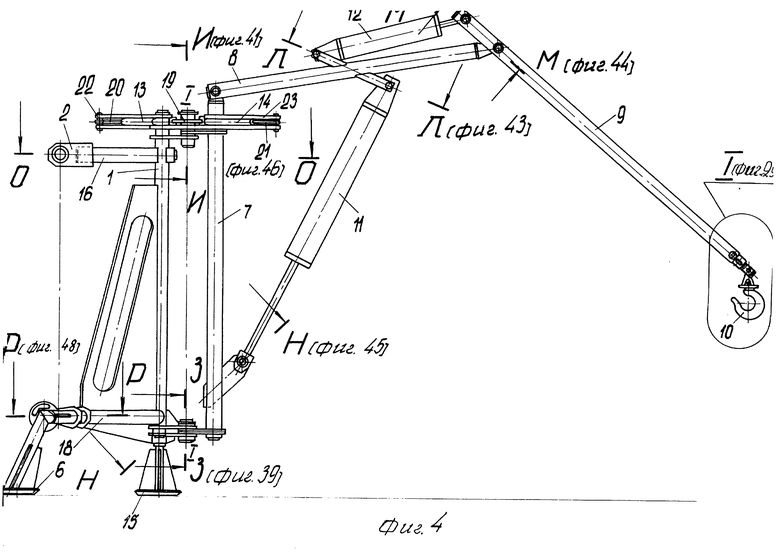
На фиг. 4 - манипулятор в рабочем положении, вид слева (по ходу движения агрегатируемого трактора).
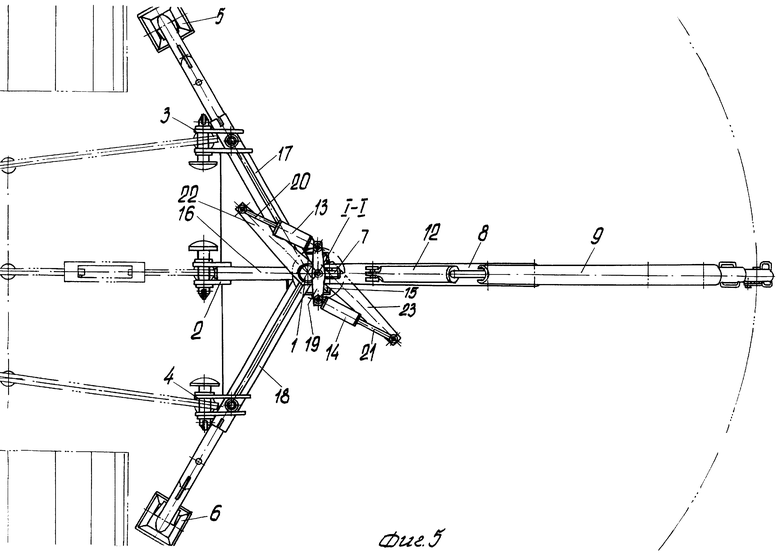
На фиг. 5 - то же, вид в плане в рабочем положении с агрегатируемым трактором.
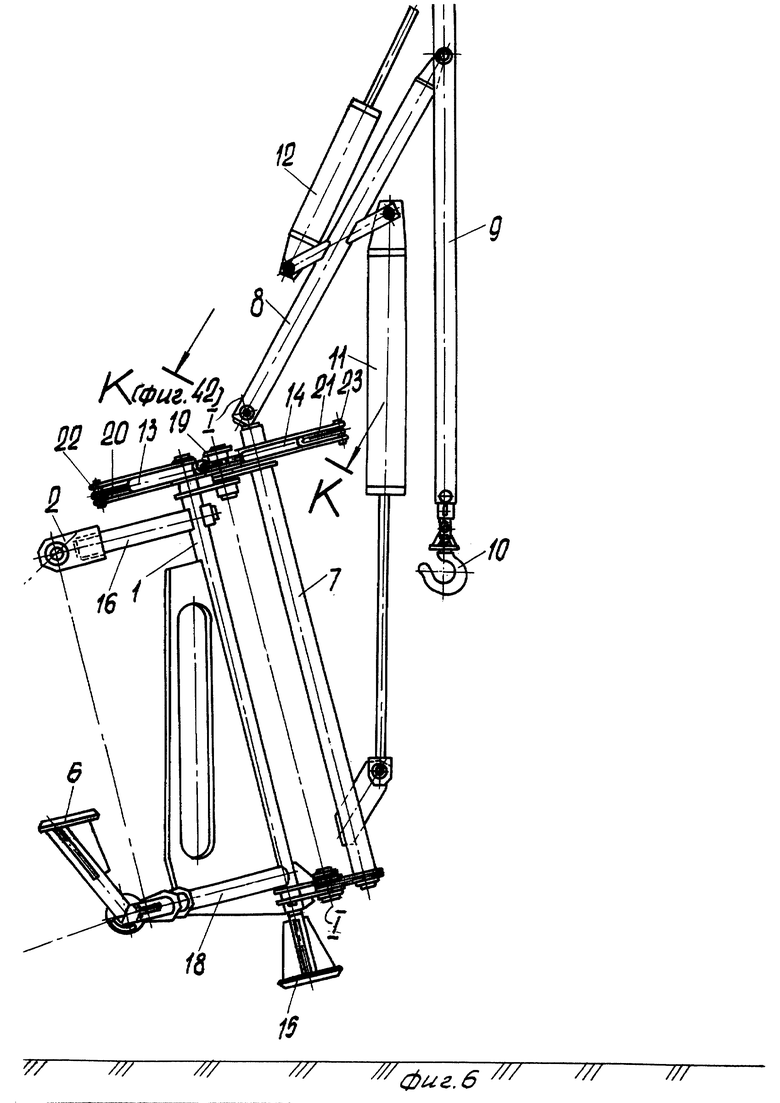
На фиг. 6 - положение манипулятора при транспортировке на небольшие расстояния при перевалке грузов на ограниченной площадке, вид сбоку.
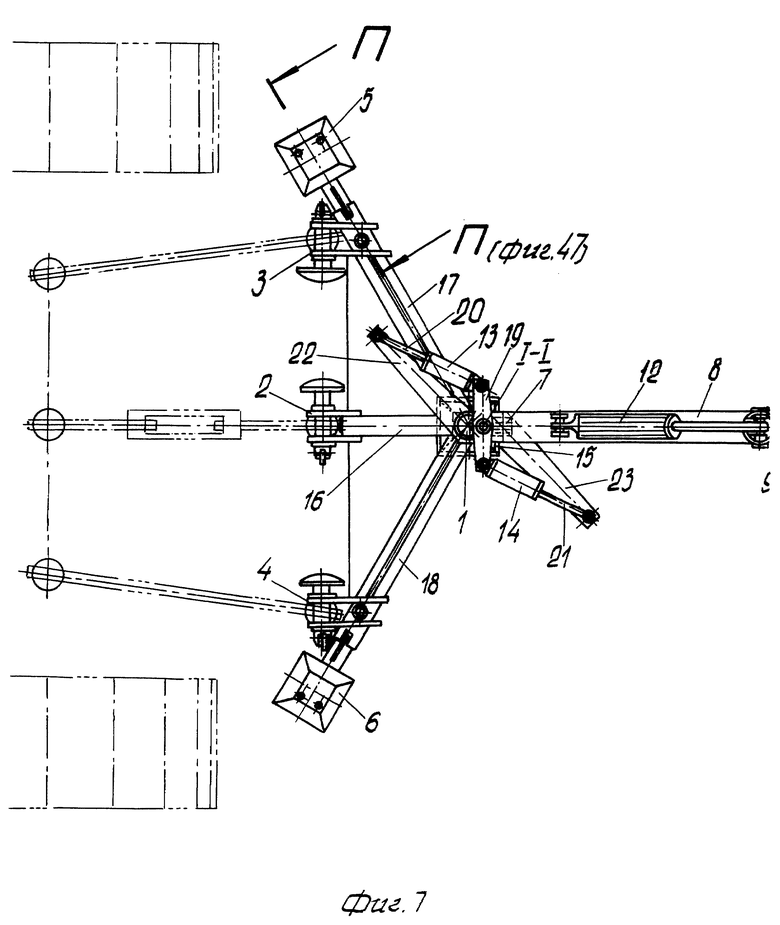
На фиг. 7 - то же, вид в плане.
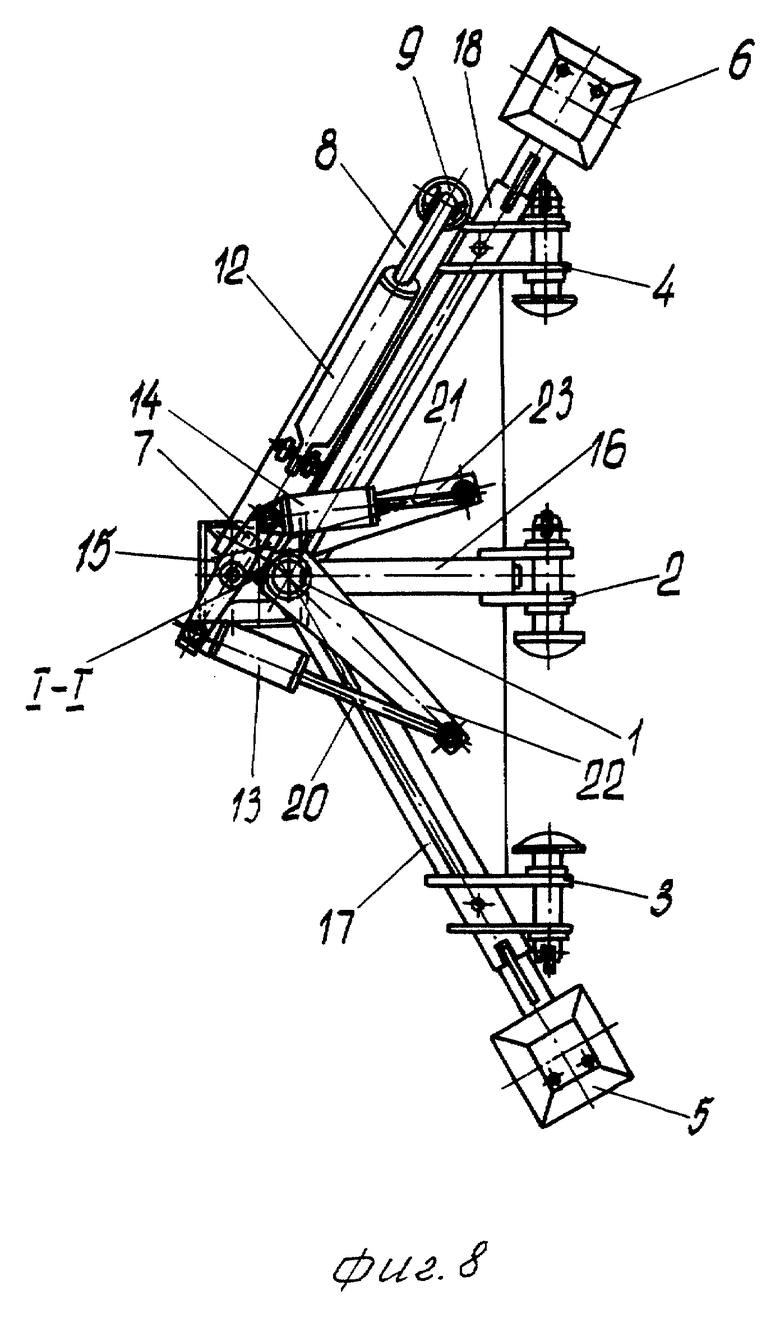
На фиг. 8 - положения основания, поворотной колонки, стрелы и рукояти при постановке манипулятора на хранение или его консервации на длительный срок хранения, вид в плане.
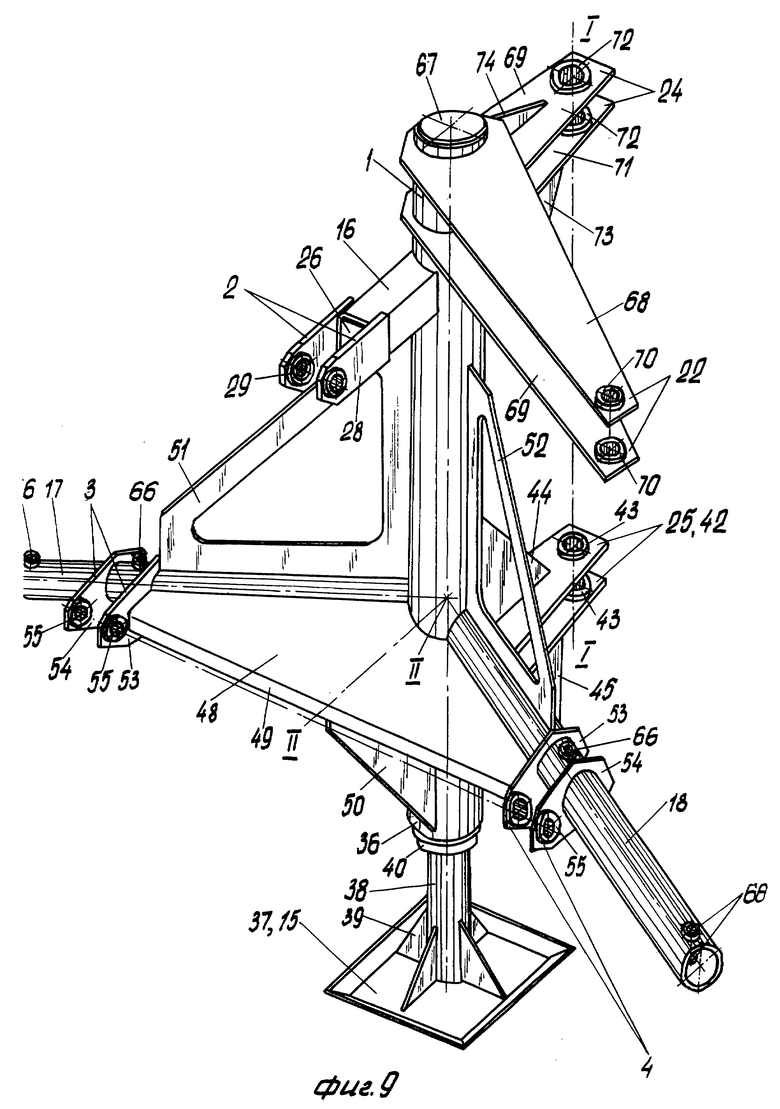
На фиг. 9 - в аксонометрическом изображении основание манипулятора.
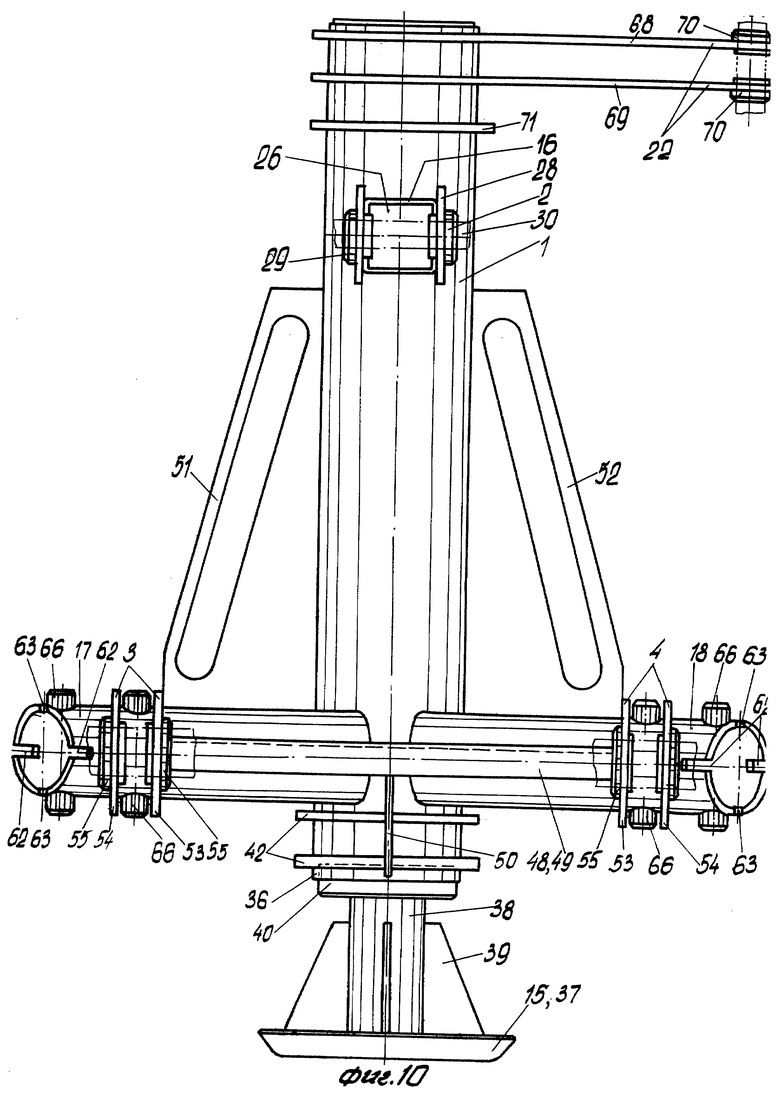
На фиг. 10 - то же, вид спереди.
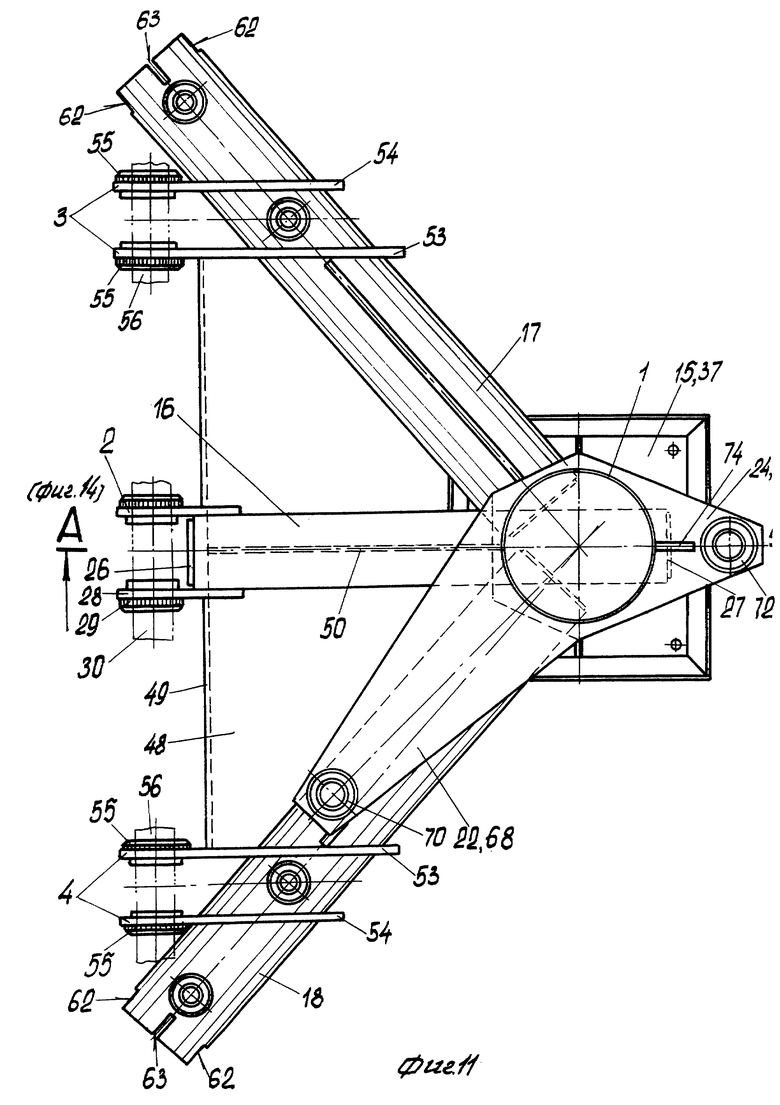
На фиг. 11 - то же, вид в плане.
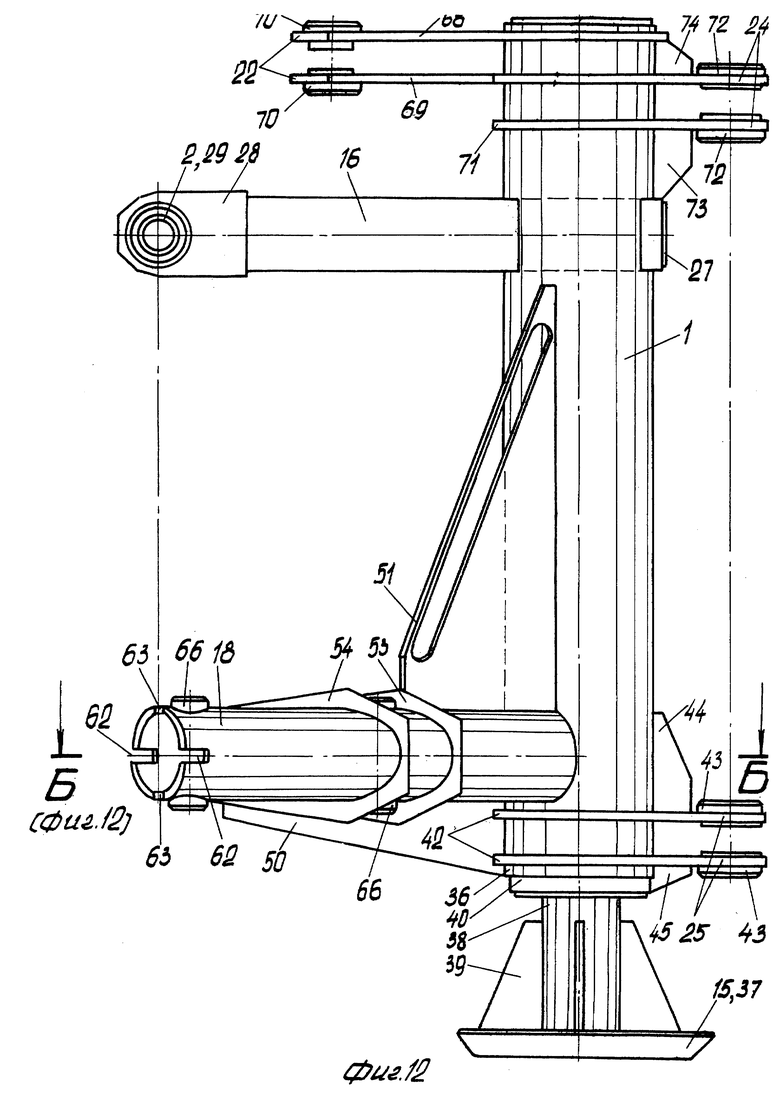
На фиг. 12 - то же, вид слева.
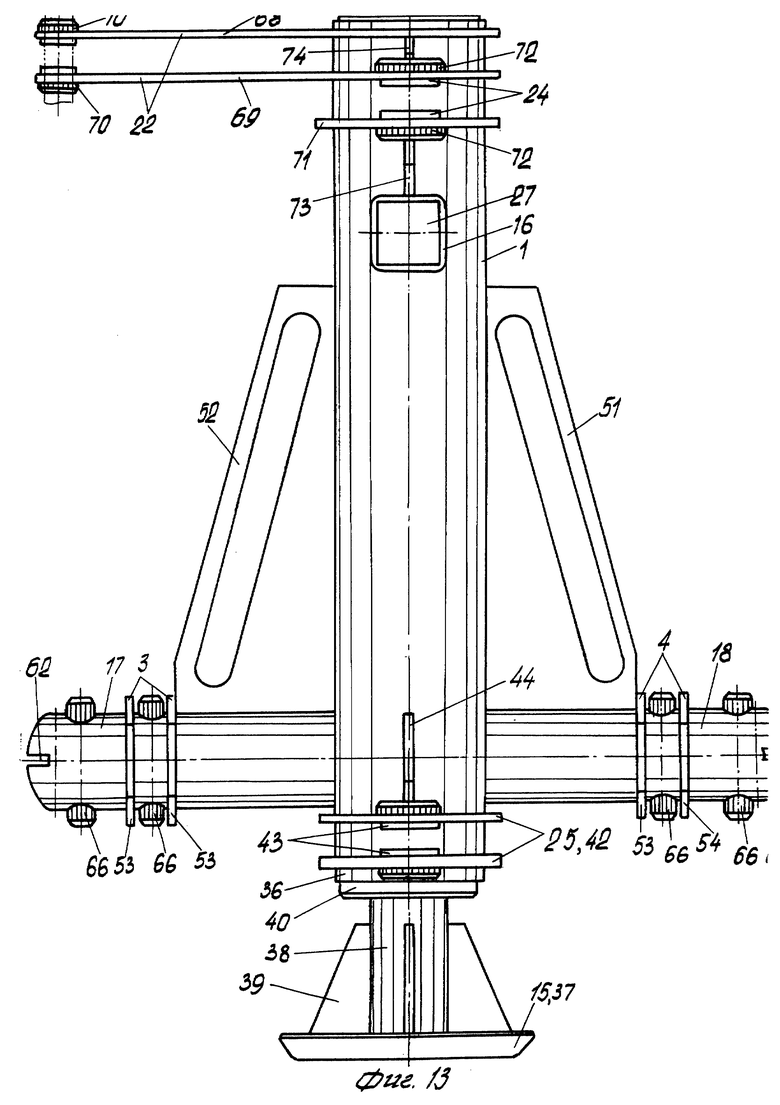
На фиг. 13 - то же, вид сзади.
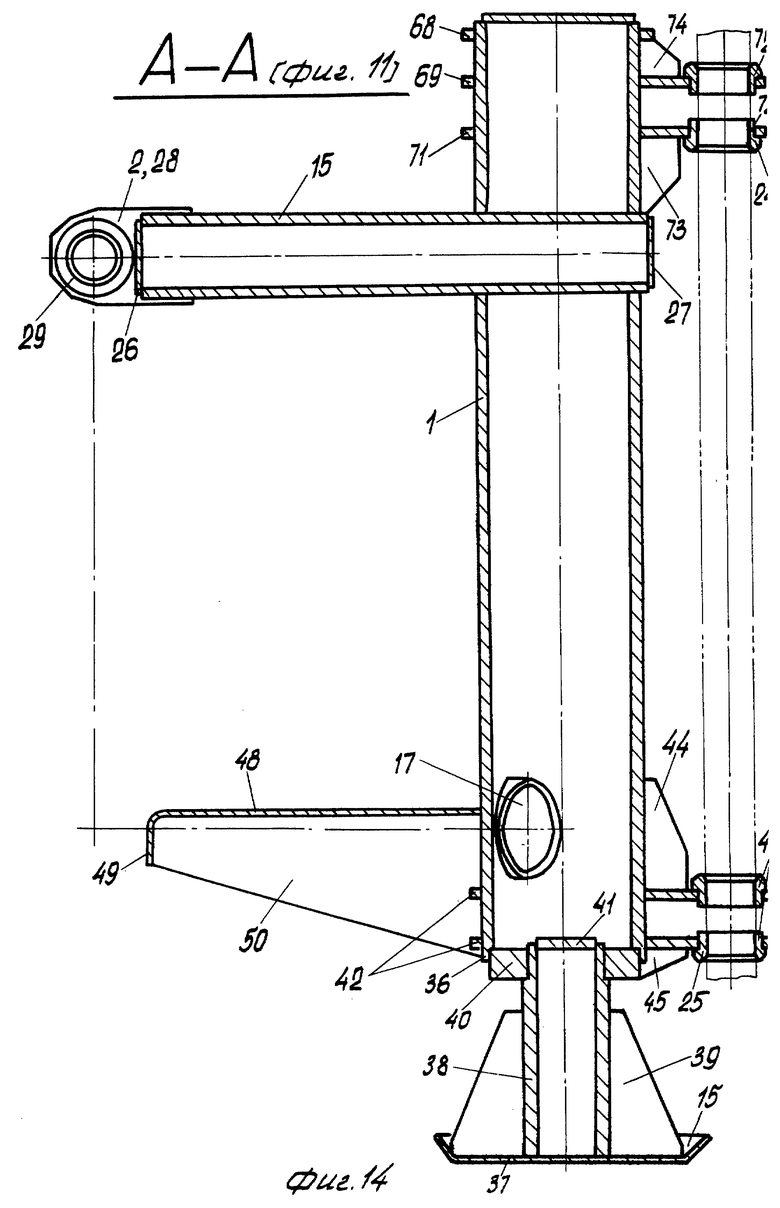
На фиг. 14 - сечение А-А на фиг. 11, продольно-вертикальный разрез основания в плоскости симметрии.
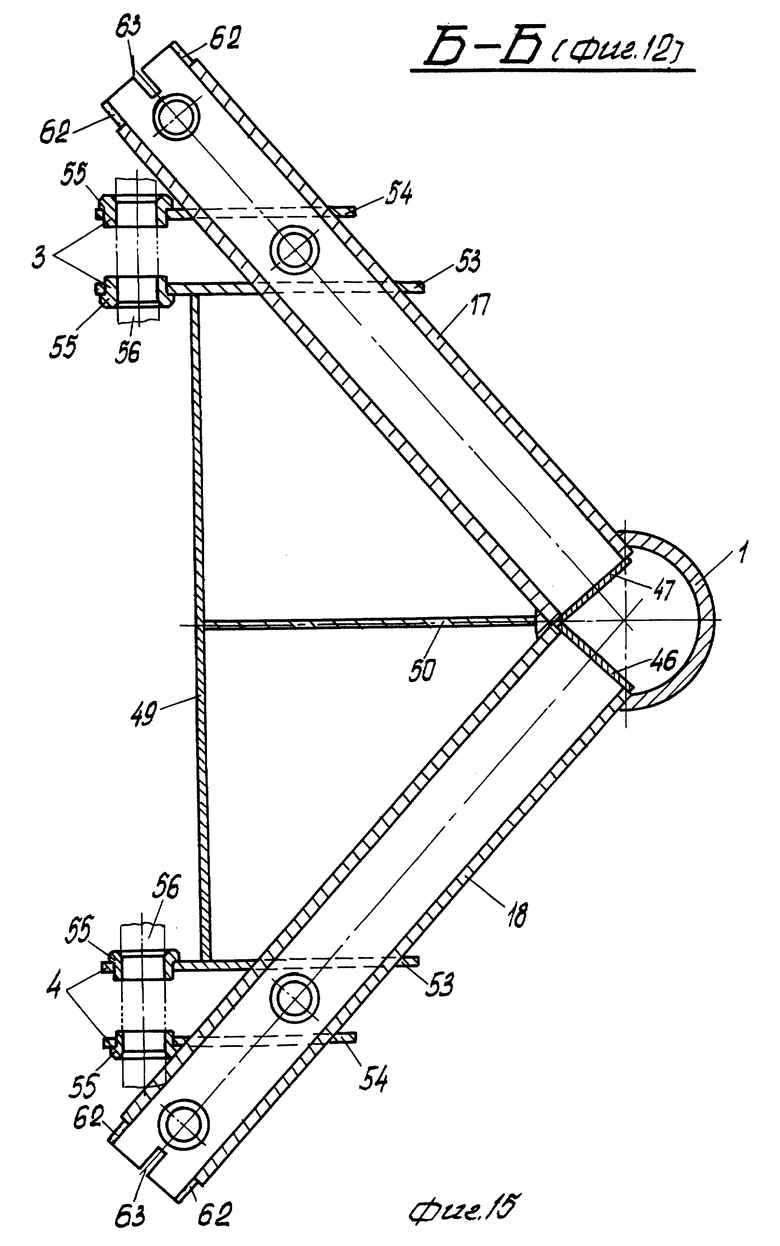
На фиг. 15 - сечение Б-Б на фиг. 12, горизонтальное сечение нижних балок, вертикального бруса основания и нижних кронштейнов навески.
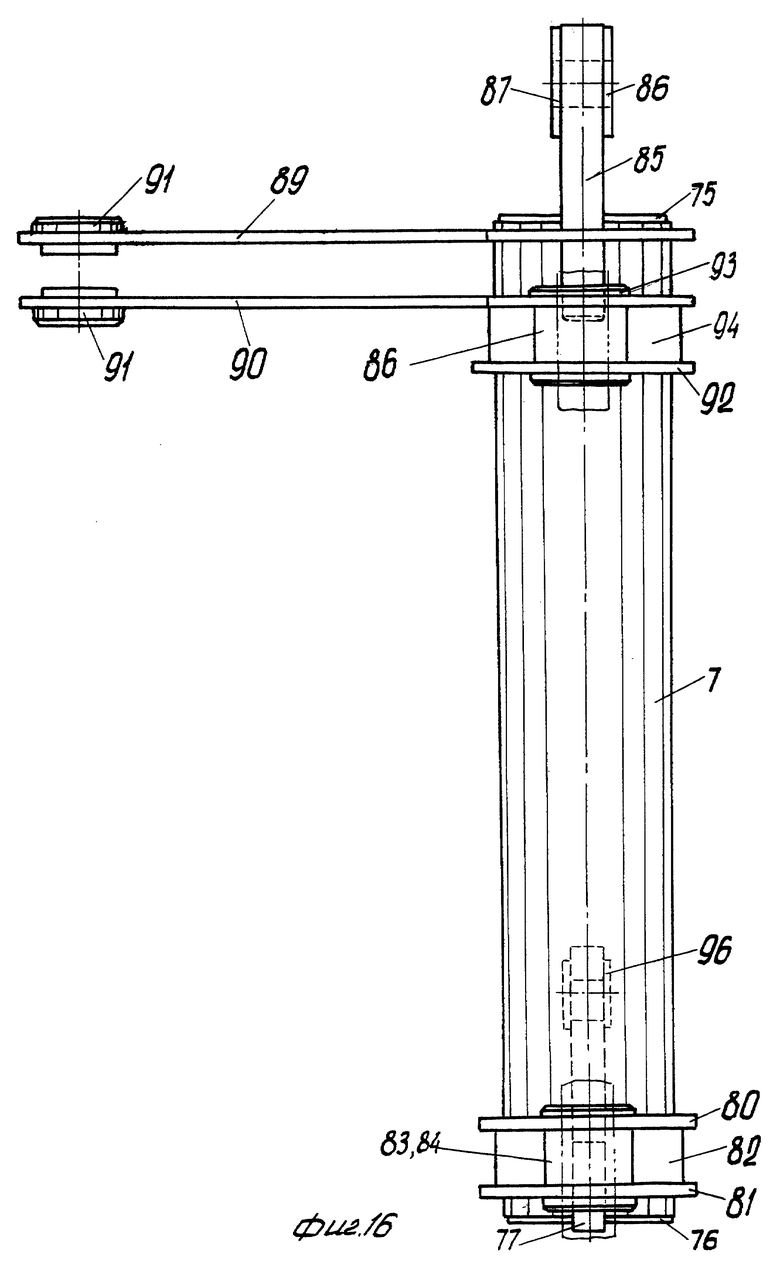
На фиг. 16 - опорно-поворотная колонка, вид спереди.
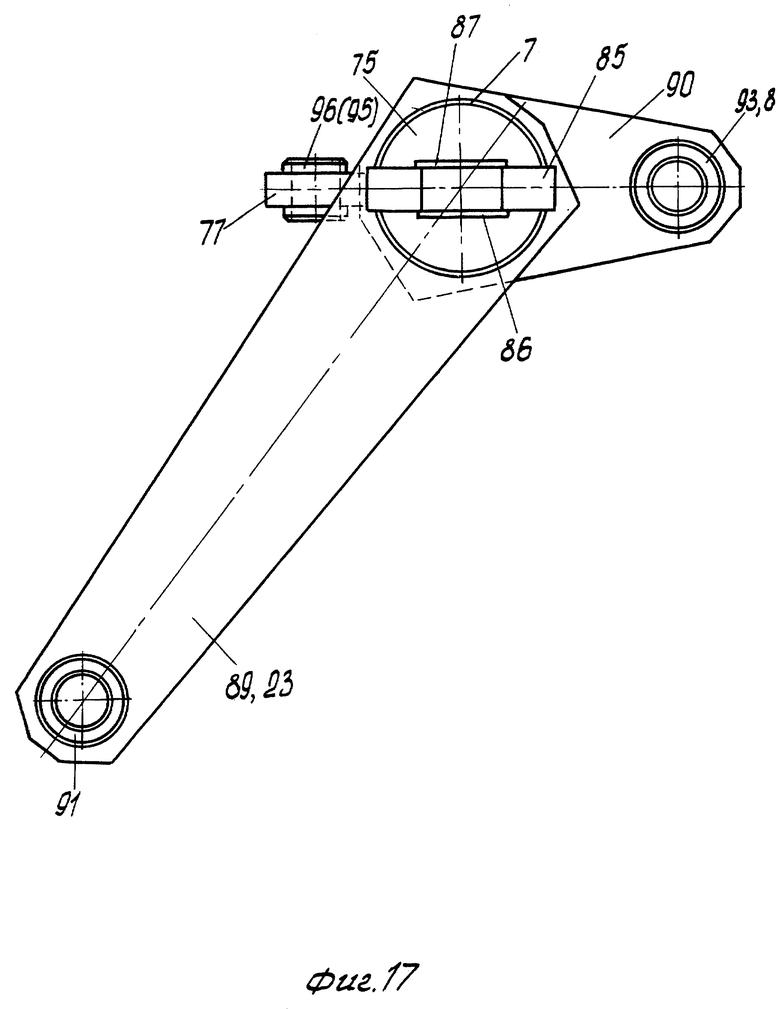
На фиг. 17 - то же, вид в плане.
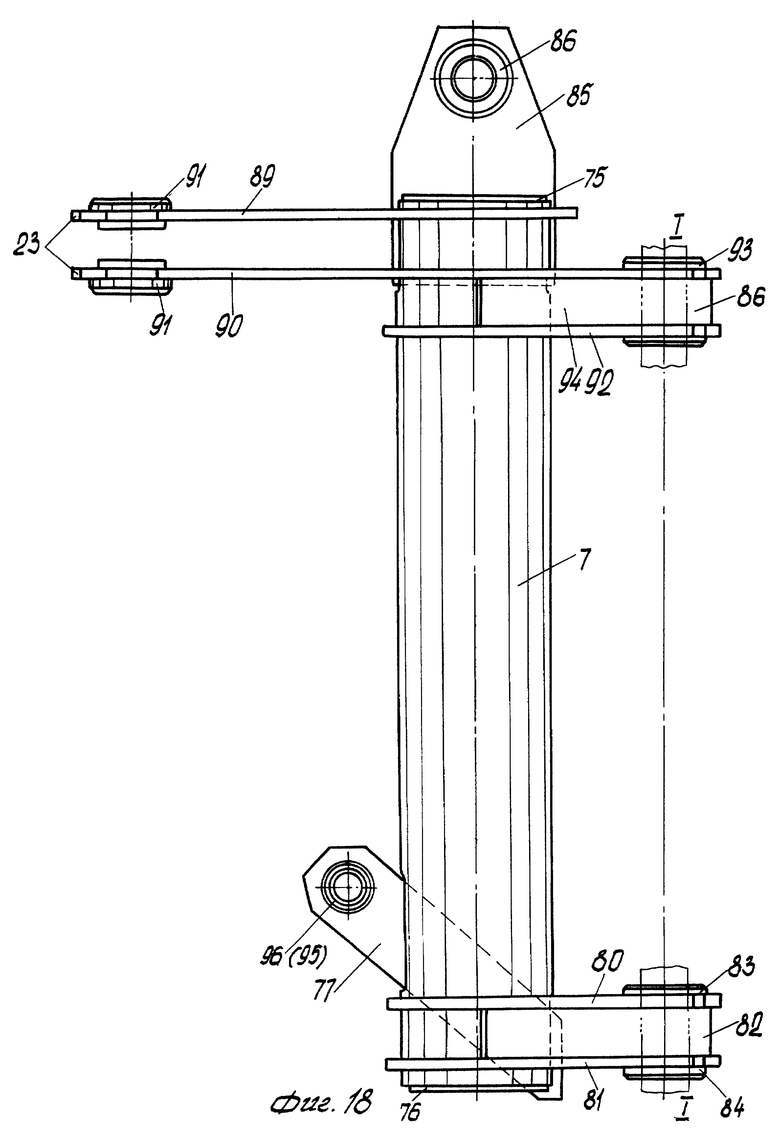
На фиг. 18 - то же, вид справа.
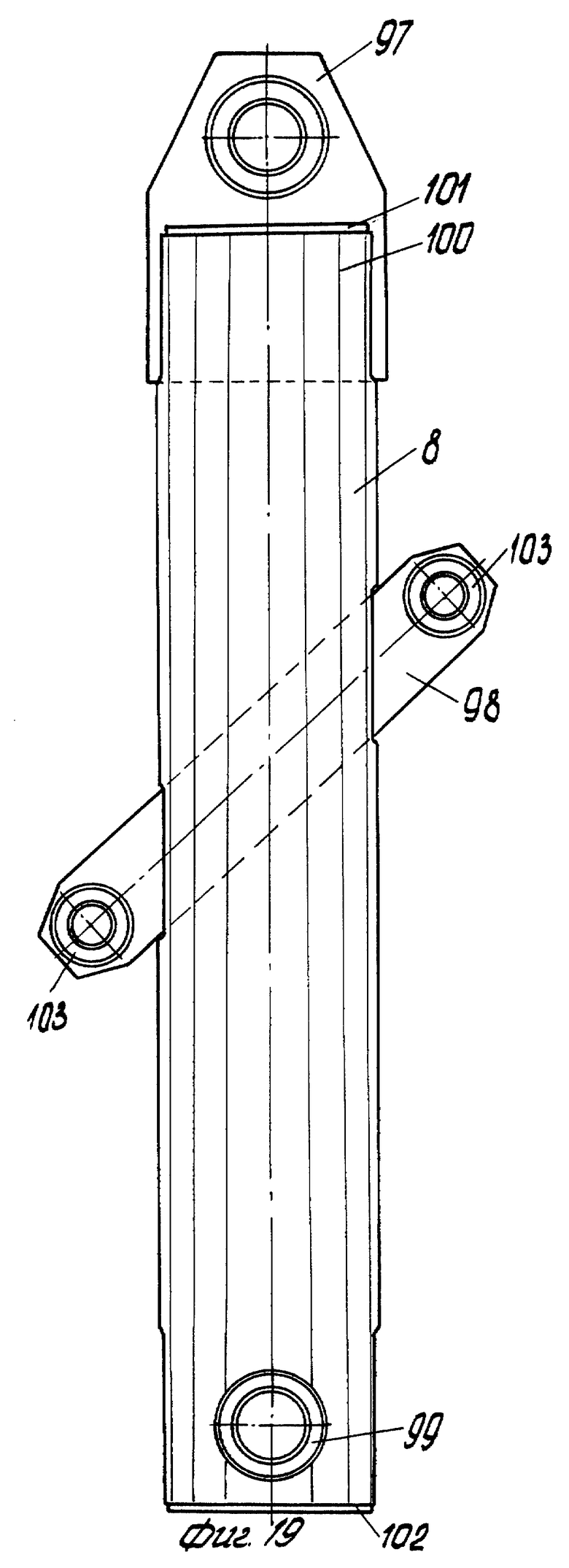
На фиг. 19 - стрела манипулятора, вид слева.
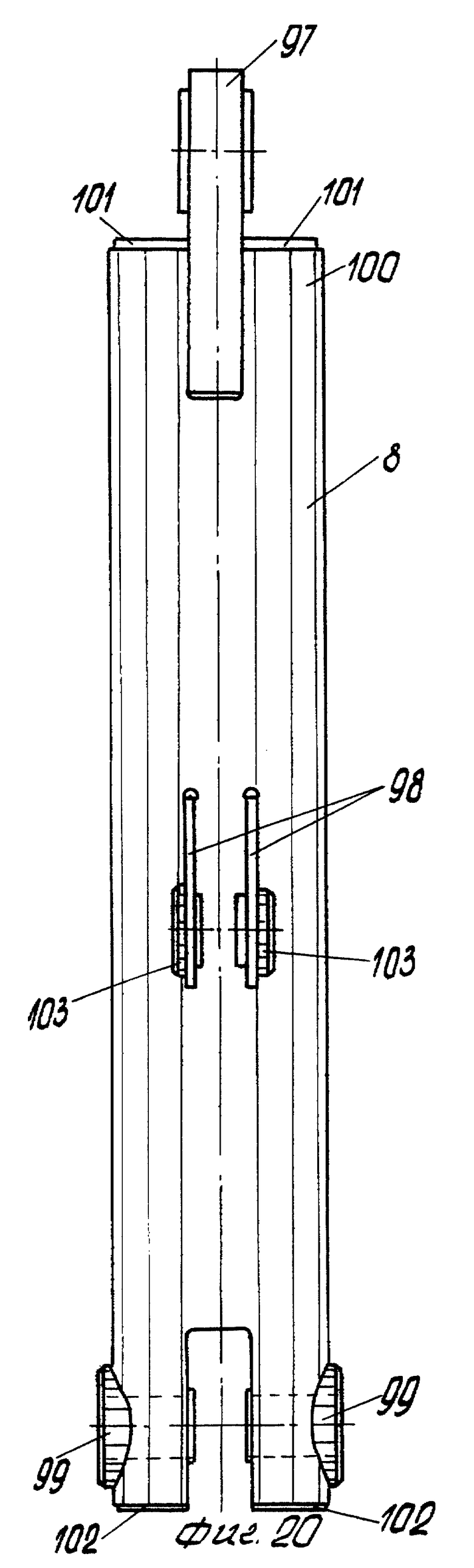
На фиг. 20 - то же, вид в плане.
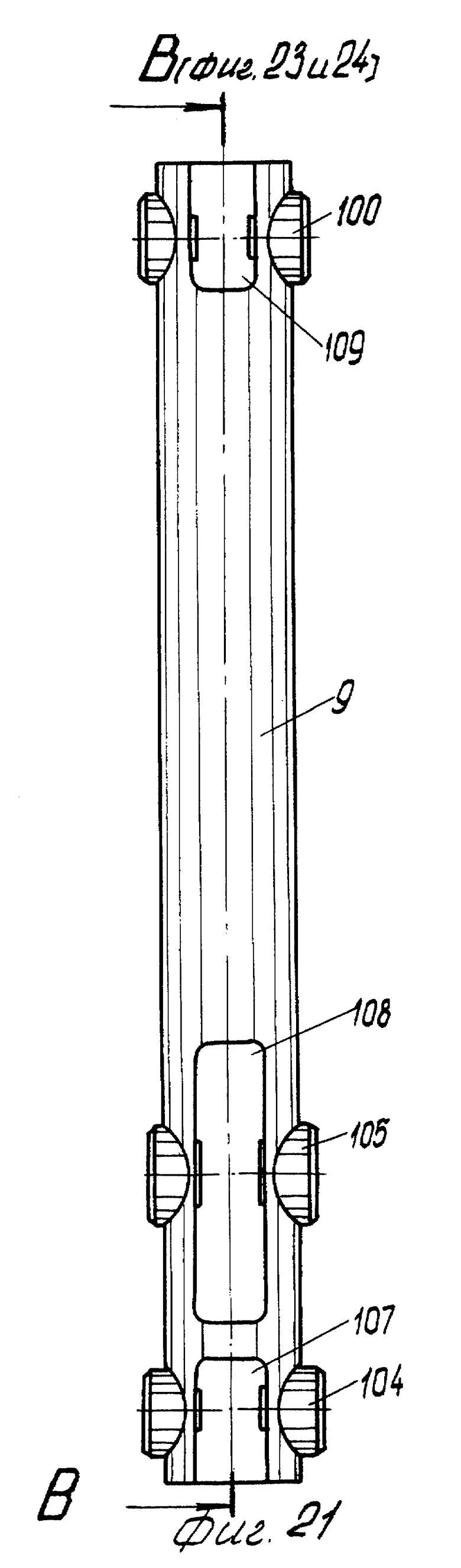
На фиг. 21 - рукоять, вид снизу.
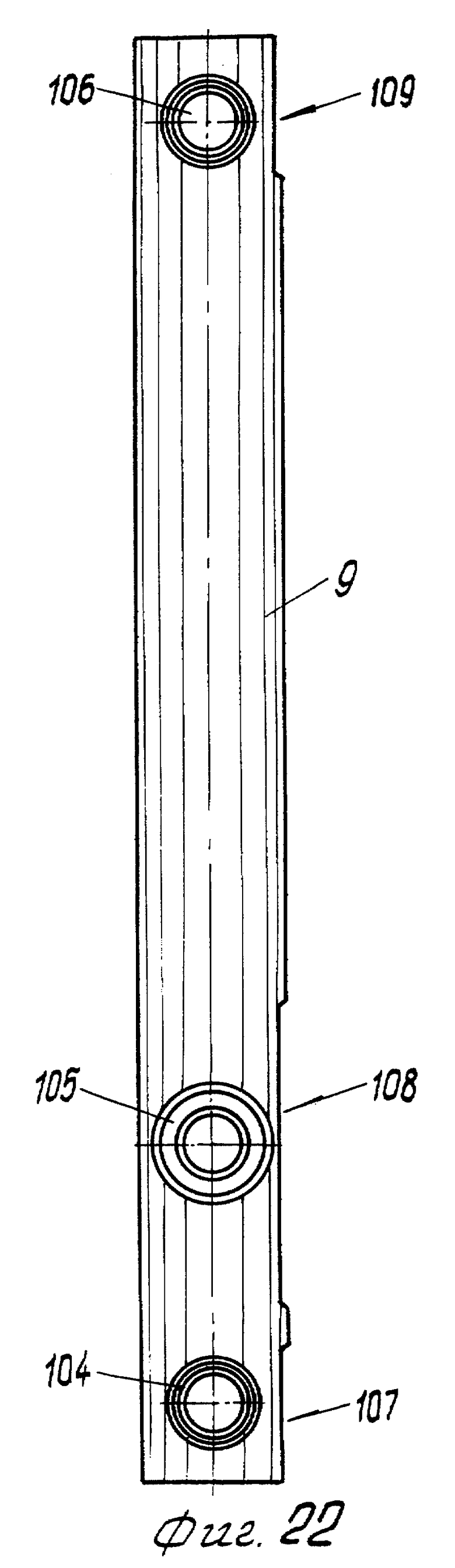
На фиг. 22 - то же, вид слева.
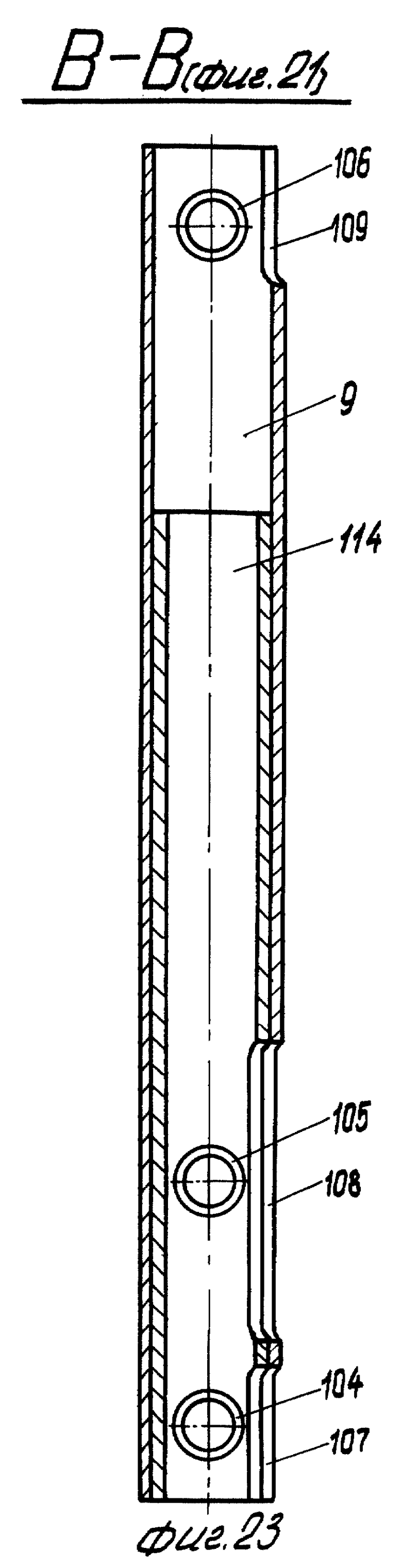
На фиг. 23 - сечение В-В на фиг. 21, диаметральный разрез рукояти, вариант выполнения рукояти из двух разнодлинных полых профилей, например, круглого сечения.
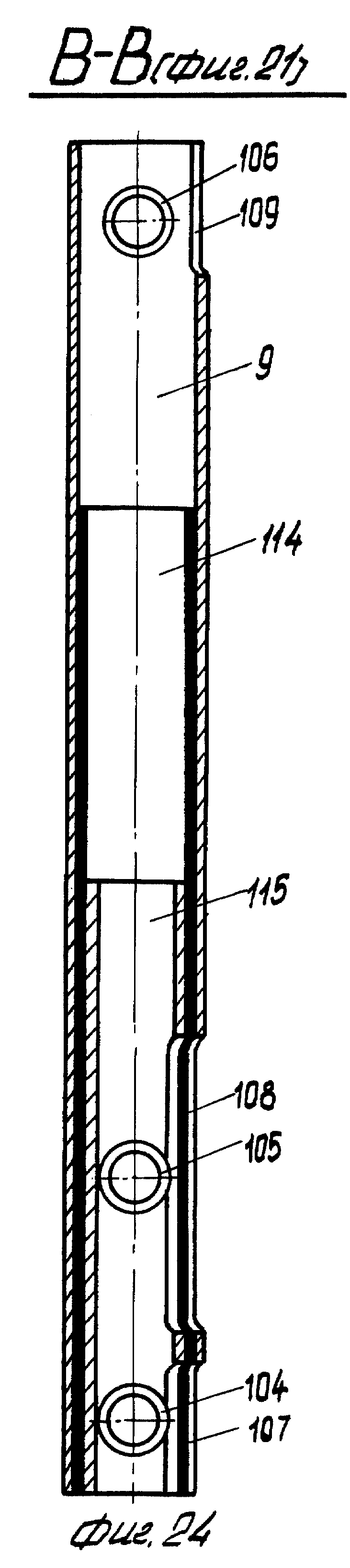
На фиг. 24 - сечение В-В на фиг. 21, вариант выполнения рукояти из трех взаимно сопрягаемых разнодлинных и разнотолщинных полых профилей.
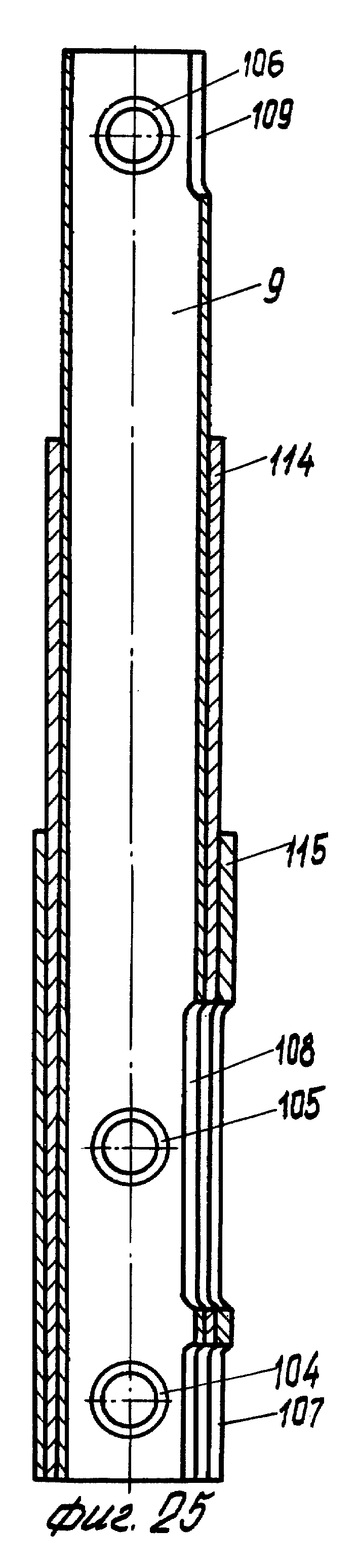
На фиг. 25 - то же, но при внешнем ступенчатом размещении профилей на основном несущем элементе.
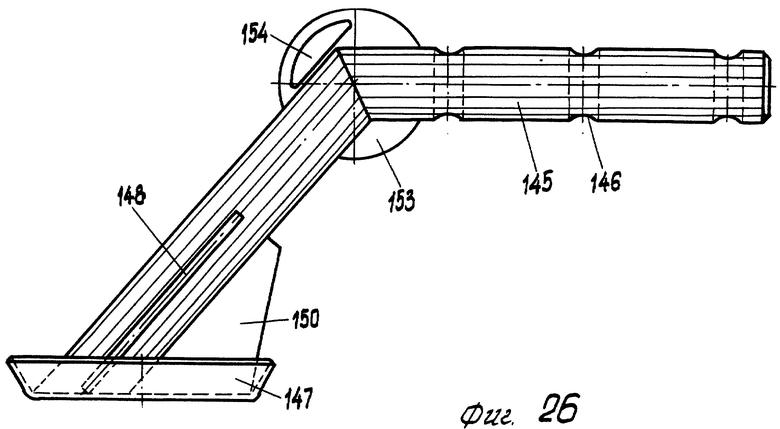
На фиг. 26 - выдвижная опора, вид сбоку.
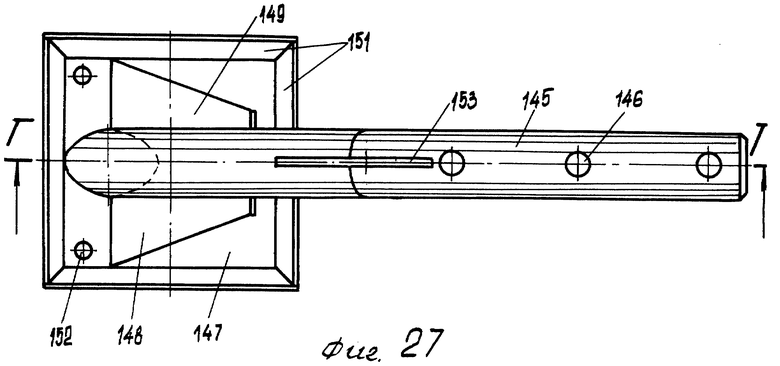
На фиг. 27 - то же, вид в плане.
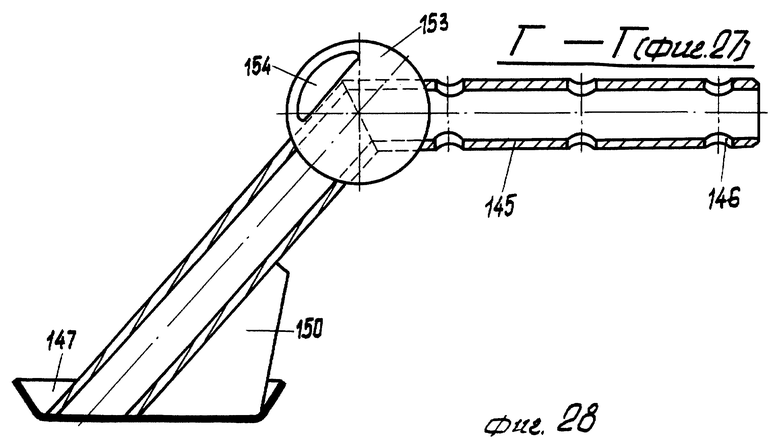
На фиг. 28 - сечение Г-Г на фиг. 27, вертикальный разрез выдвижной опоры.
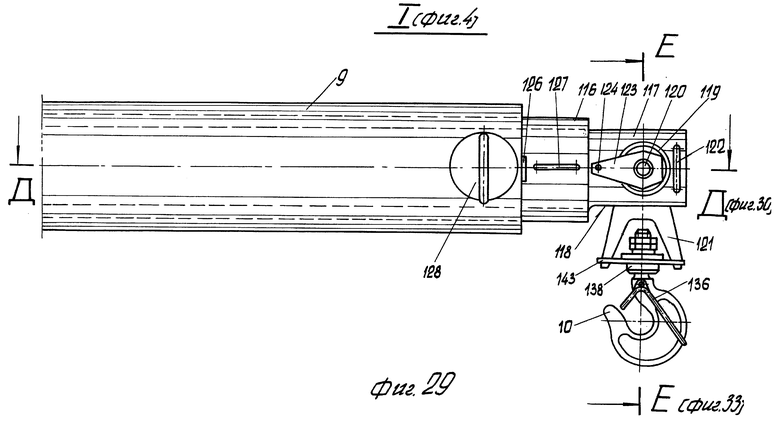
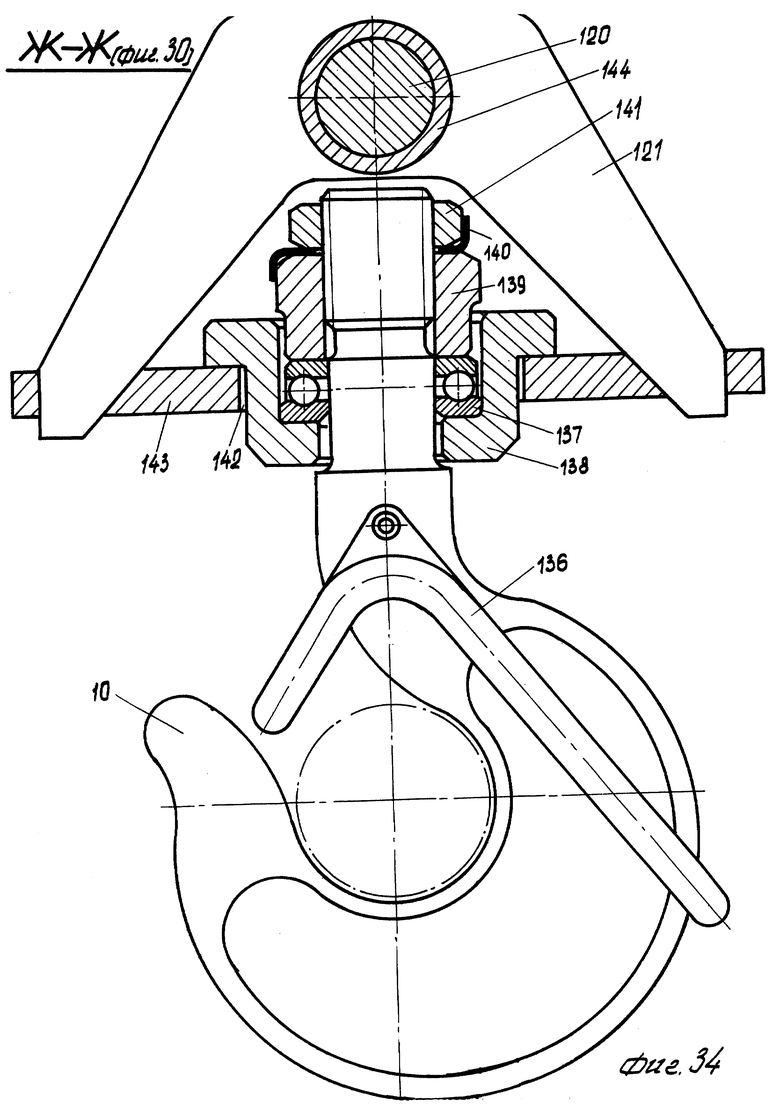
На фиг. 29 - место I на фиг. 4, положение грузозахватного крюка на консольной части телескопической рукояти.
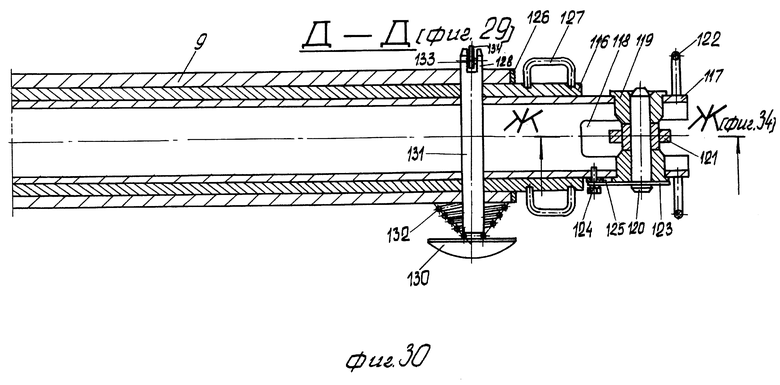
На фиг. 30 - сечение Д-Д на фиг. 29, диаметральный разрез подвижных частей в полости рукояти.
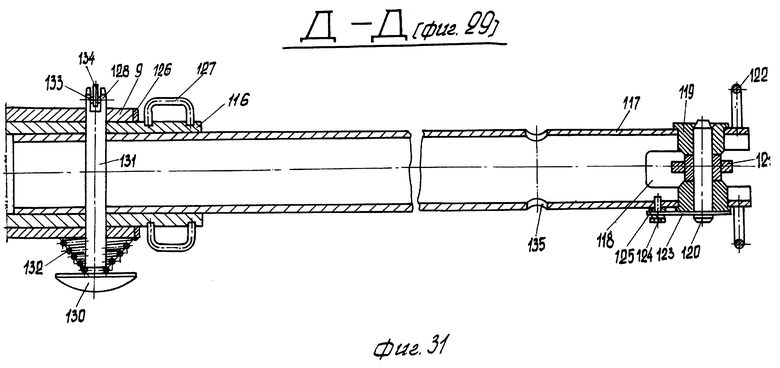
На фиг. 31 - сечение Д-Д на фиг. 29, фиксация положений подвижных частей рукояти при ее удлинении внутренней частью.
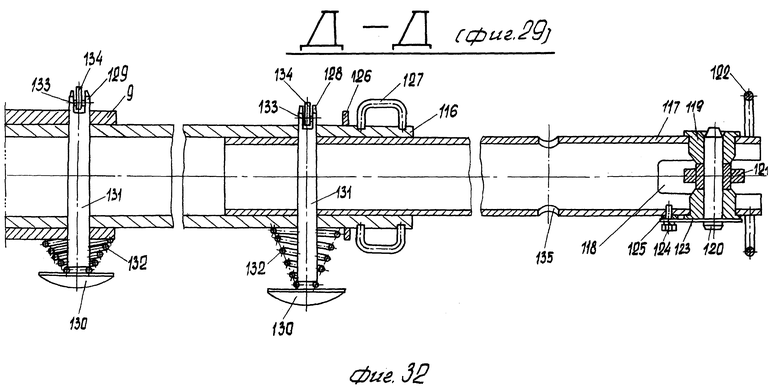
На фиг. 32 - сечение Д-Д на фиг. 29, рукоять с максимально выдвинутыми подвижными средней и внутренней частями.
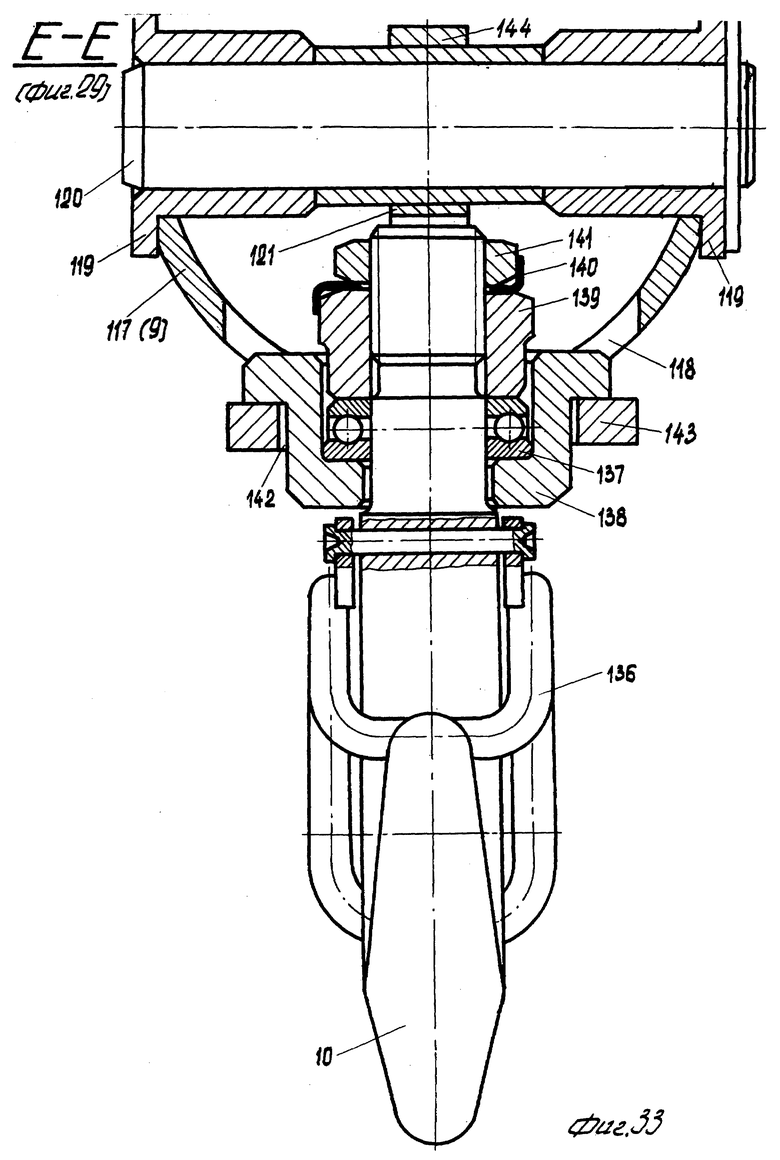
На фиг. 33 - сечение Е-Е на фиг. 29, положение грузозахватного крюка относительно оси подвеса и прорези рукояти.
На фиг. 34 - сечение Ж-Ж на фиг. 30, взаимное положение подвеса и траверсы грузозахватного крюка.
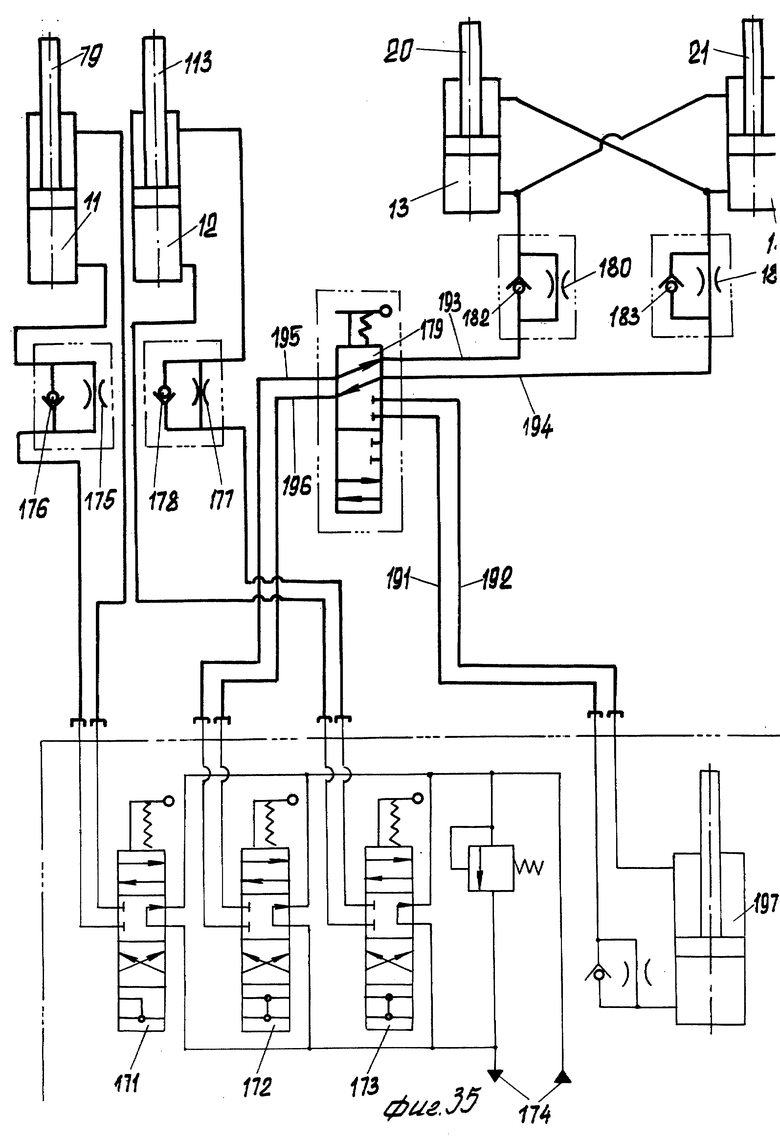
На фиг. 35 - принципиальная гидравлическая схема манипулятора.
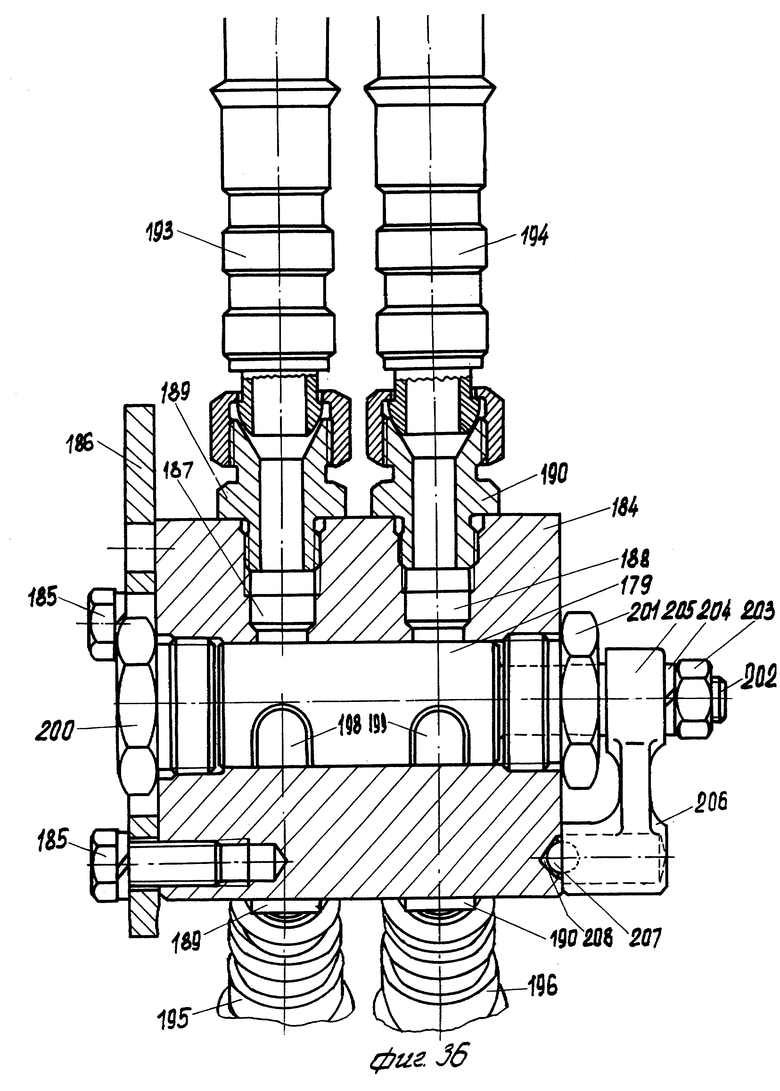
На фиг. 36 - диаметральный разрез двухпозиционного распределительного крана.
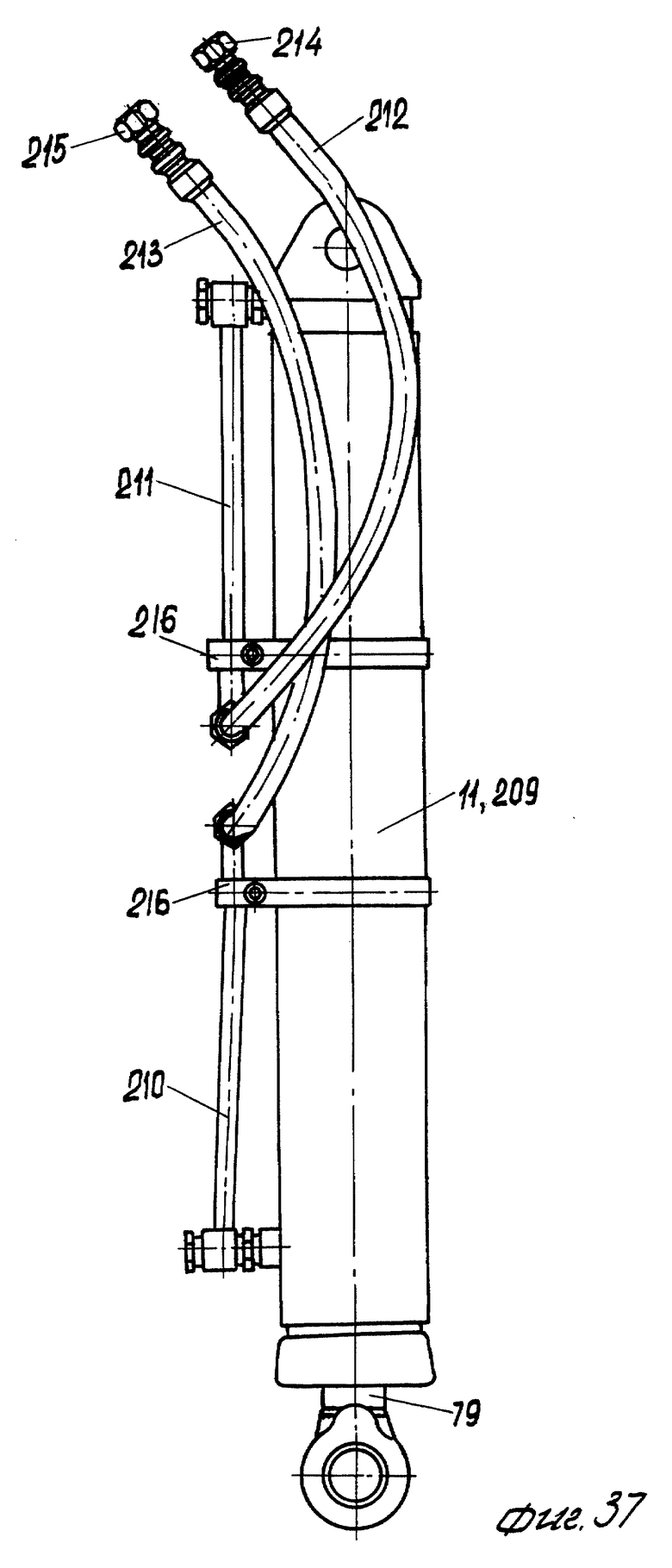
На фиг. 37 - силовой гидроцилиндр стрелы, вид слева.
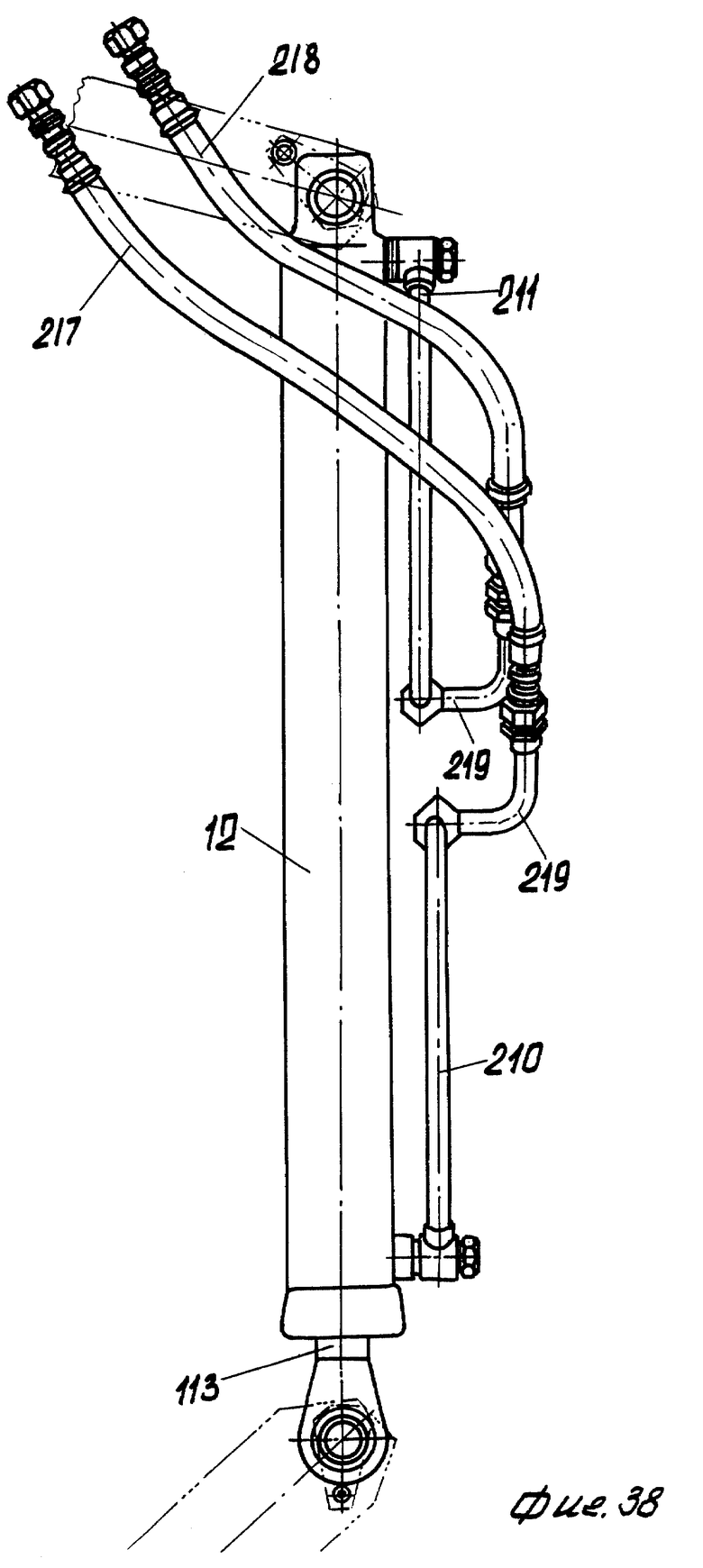
На фиг. 38 - силовой гидроцилиндр управления рукоятью, вид слева.
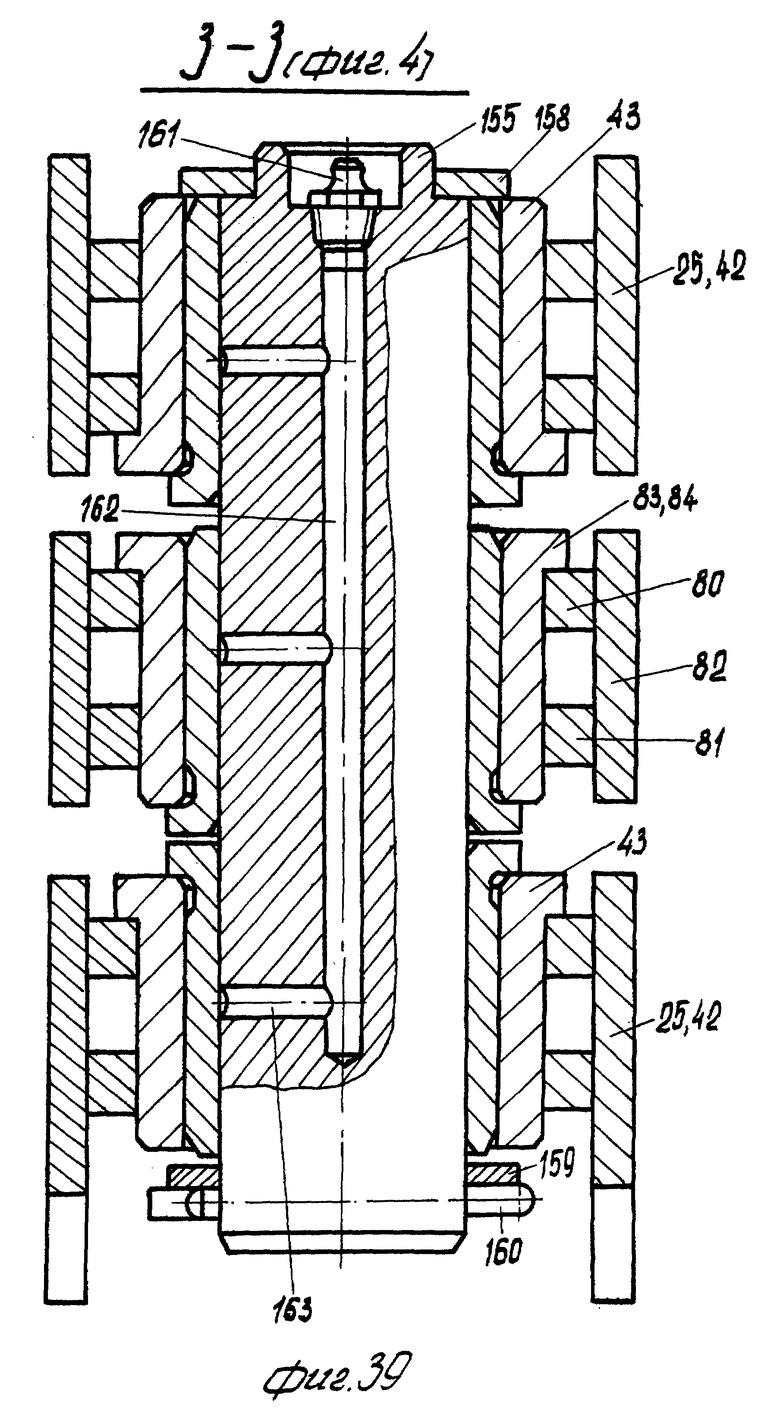
На фиг. 39 - сечение З-З на фиг. 4, узел нижнего шарнира соединения опорно-поворотной колонки с основанием.
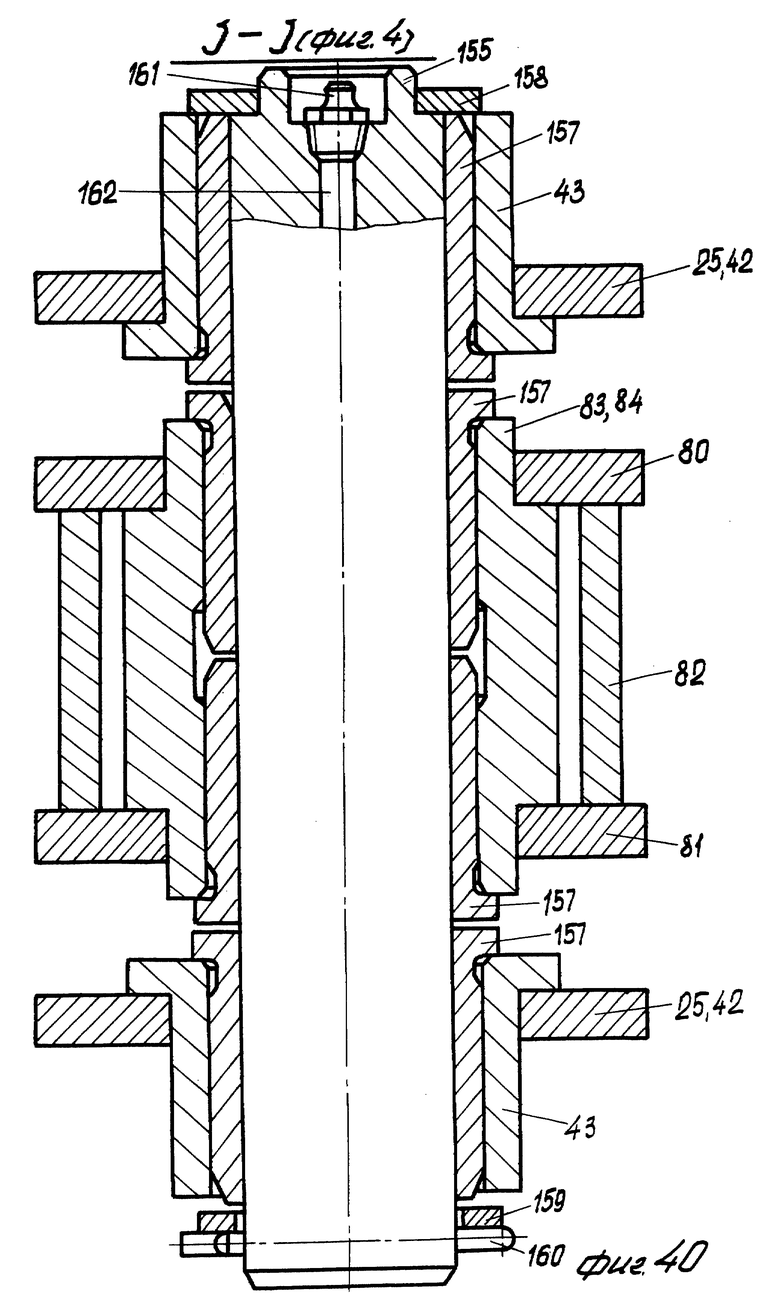
На фиг. 40 - сечение З-З на фиг. 4, вариант конструктивного исполнения нижнего шарнира в месте сопряжения основания с опорно-поворотной колонкой.
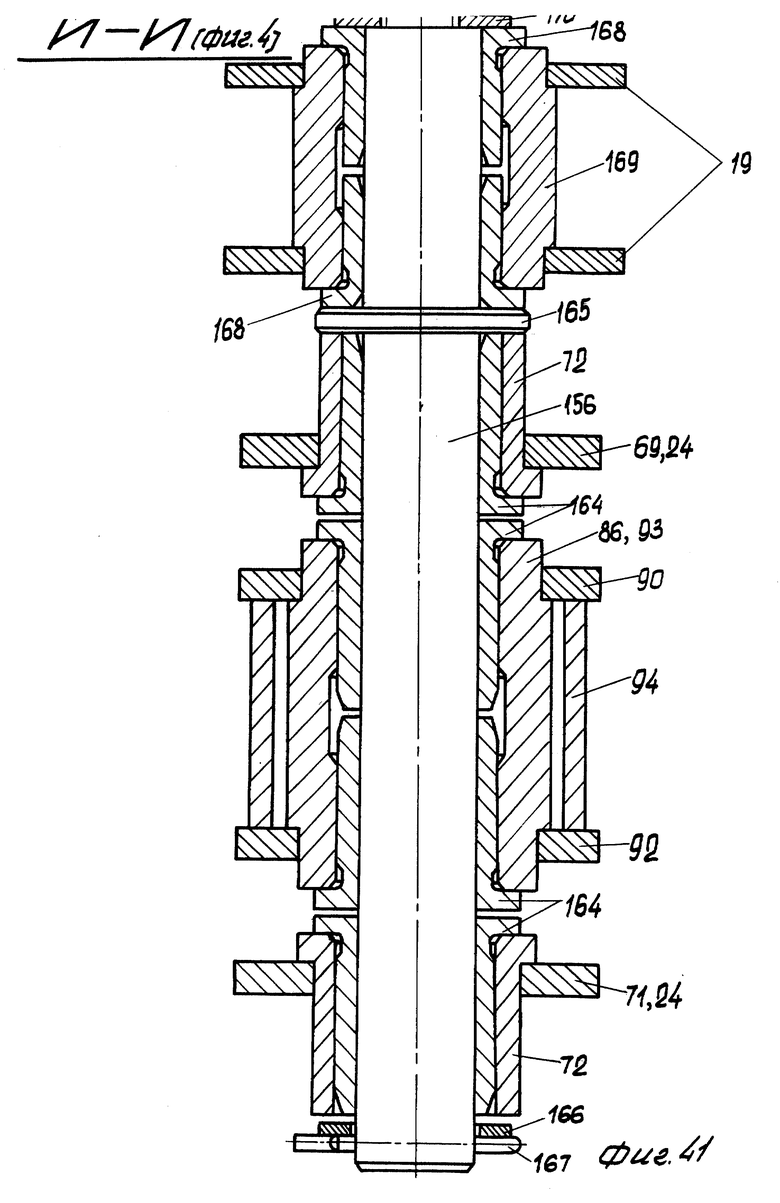
На фиг. 41 - сечение И-И на фиг. 4, узел верхнего шарнира опорно-поворотной колонки и основания.
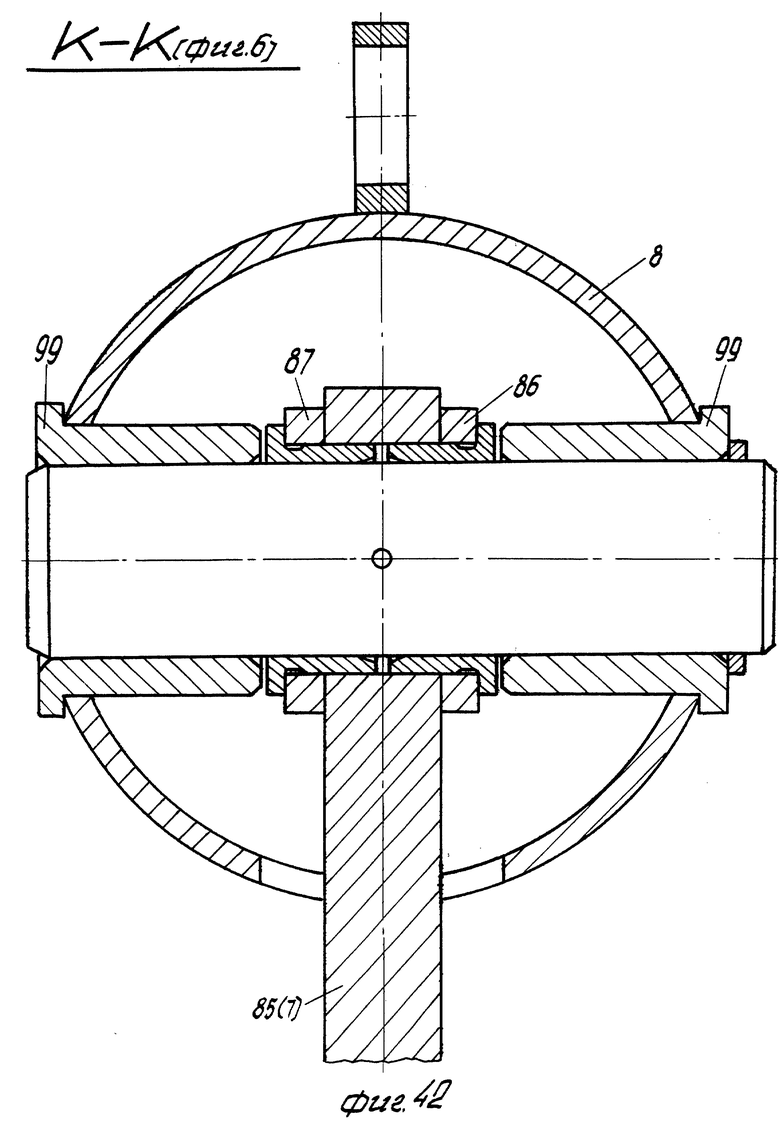
На фиг. 42 - сечение К-К на фиг. 6, соединение верхней части опорно-поворотной колонки и стрелы.
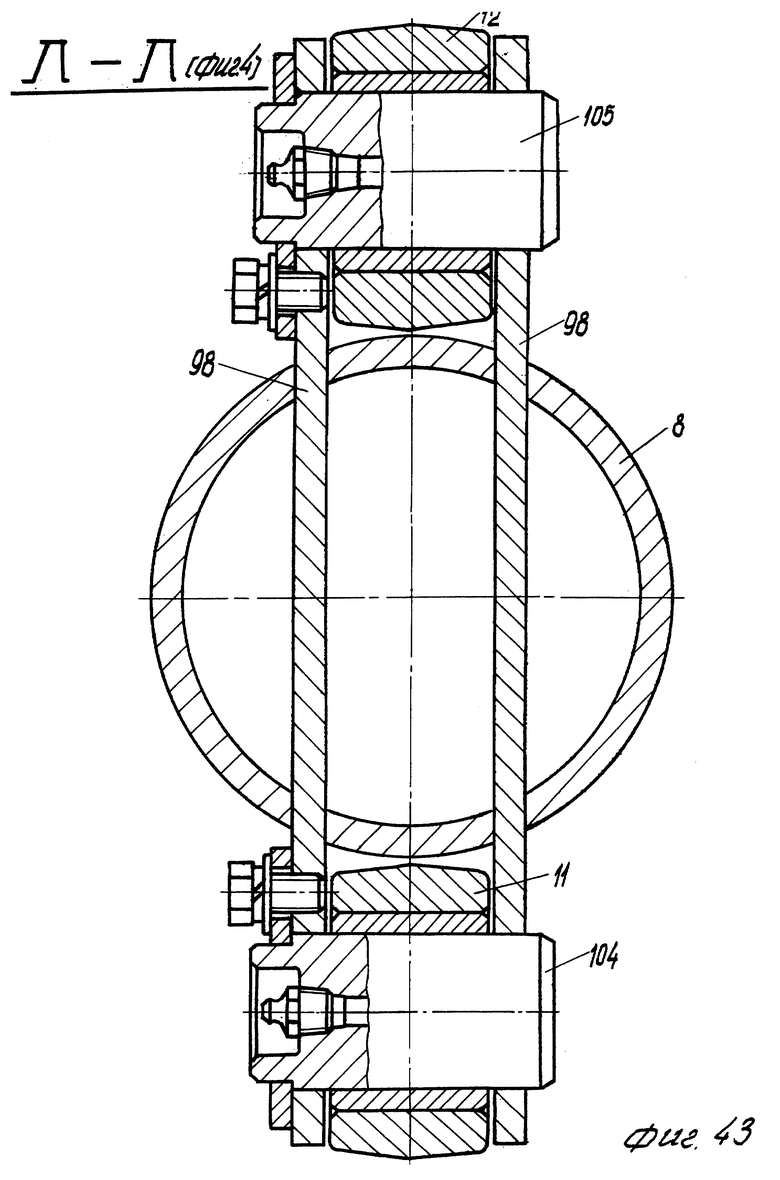
На фиг. 43 - сечение Л-Л на фиг. 4, сечение кронштейна стрелы и осей шарнирных соединений оснований силовых гидроцилиндров и стрелы.
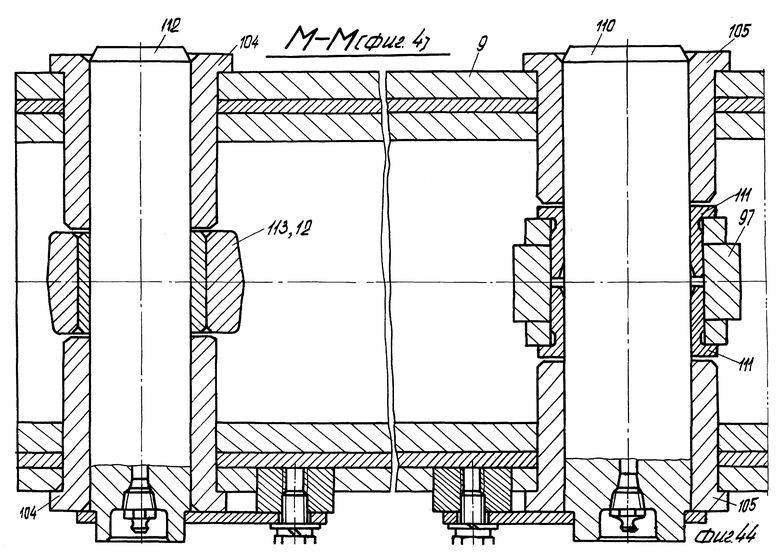
На фиг. 44 - сечение М-М на фиг. 4, диаметральный разрез рукояти в месте соединения со стрелой и штоком силового цилиндра.
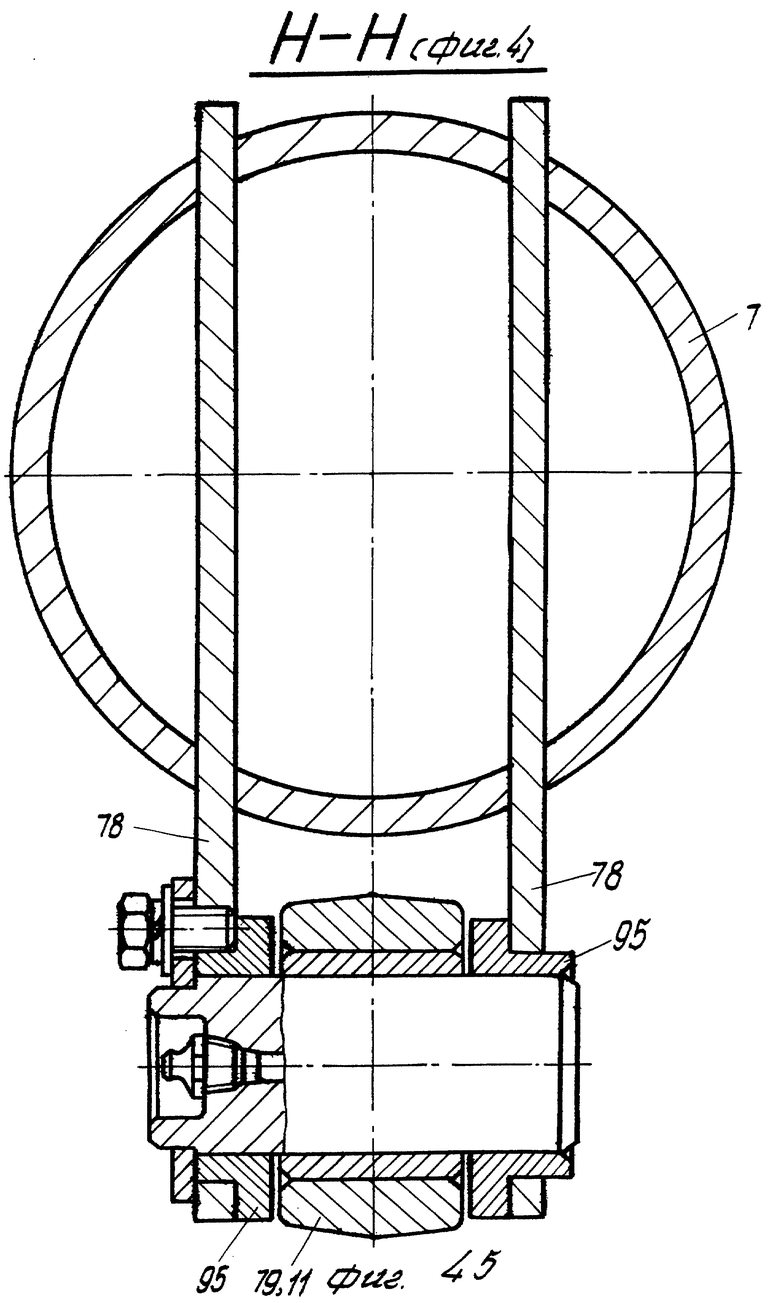
На фиг. 45 - сечение Н-Н на фиг. 4, поперечное сечение опорно-поворотной колонки в месте соединения кронштейна штока силового гидроцилиндра стрелы.
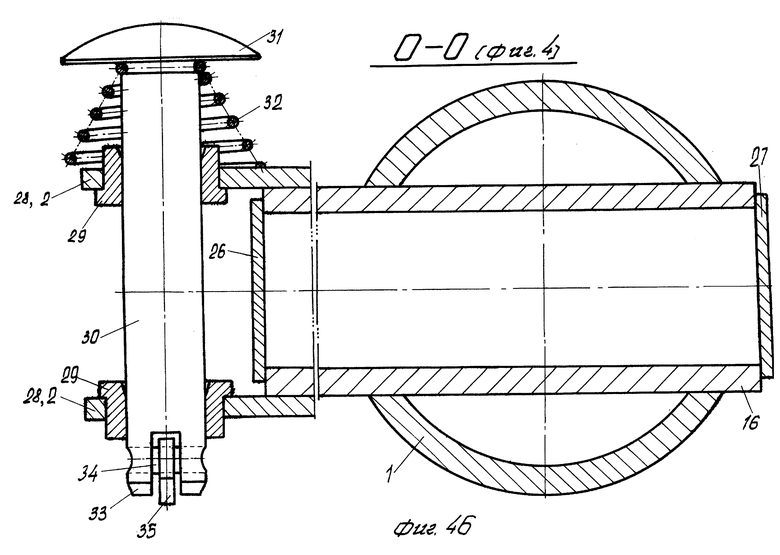
На фиг. 46 - сечение О-О на фиг. 4, горизонтальное сечение верхней балки основания и кронштейна навески со съемным пальцем.
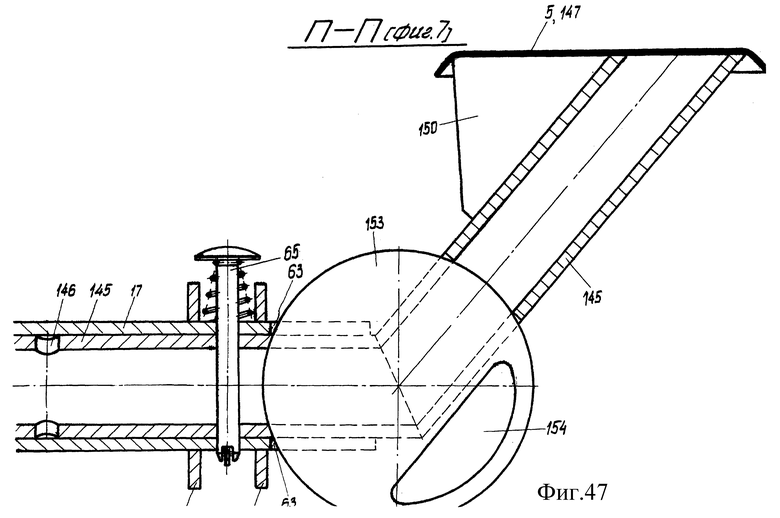
На фиг. 47 - сечение П-П на фиг. 7, узел сопряжения правой выдвижной опоры с правой нижней балкой основания, опора установлена в транспортном положении.
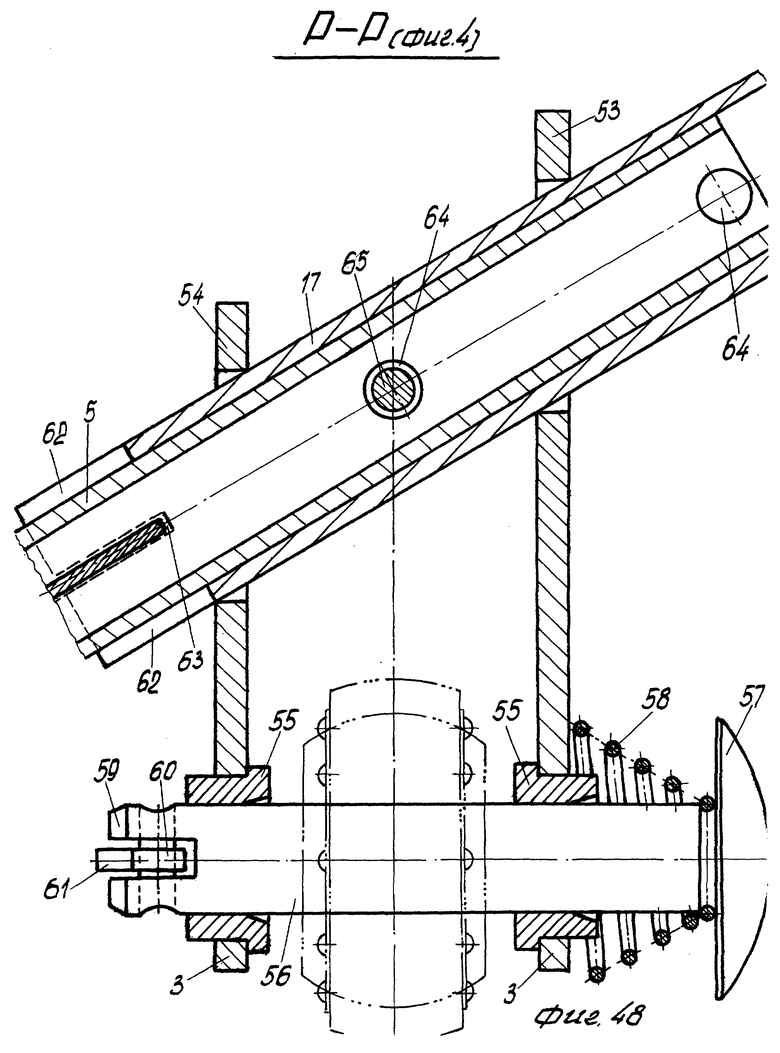
На фиг. 48 - сечение Р-Р на фиг. 4, узел сопряжения правой нижней балки основания с балкой выдвижной опоры правого нижнего кронштейна навески со съемным пальцем.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Манипулятор (см. фиг. 1-8) выполнен навесным модулем и предусмотрен для агрегатирования съемными пальцами с тягами гидравлической системы тракторов предпочтительно класса тяги 3 и гидравлического соединения с их раздельно-агрегатной гидравлической системой и дистанционного управления из кабины трактора. Манипулятор содержит основание 1 с кронштейнами навески 2, 3, 4 и выдвижными опорами 5 и 6, закрепленную с возможностью поворота вокруг вертикальной оси I-I опорно-поворотную колонку 7 со смонтированной на ней шарнирно стрелой 8, рукоять 9 с грузозахватным крюком 10, гидроприводы 11 и 12 управления стрелой 8 и рукоятью 9 и механизм поворота опорно-поворотной колонкой 7, включающий в себя гидроприводы 13 и 14 управления этой колонкой.
Основание 1 снабжено неподвижной опорой 15. Основание 1 выполнено в виде полого цилиндра, имеющего ориентированные в радиальных плоскостях и ортогонально установленные к оси цилиндра нижние балки 17 и 18. В полости нижних балок 17 и 18 установлены упомянутые выдвижные опоры 5 и 6. Угол раствора γ осей нижних балок 17 и 18 выполнен на 180o. Угол раствора нижних балок 17 и 18 определяется расчетом по формуле
γ = 2π-α,
где α - угол поворота опорно-поворотной колонки 7 в горизонтальной плоскости.
Проекции II-II верхней балки 16 размещена по середине между нижними балками 17 и 18 (см. фиг. 1).
Опорно-поворотная колонка 7 выполнена в виде вертикально установленной полой штаги. Полая штанга с основанием 1 дополнительно соединена механизмом поворота. Механизм поворота 7 смонтирован на вершине основания 1. Механизм поворота колонки 7 снабжен двуплечим рычагом 19, кинематически связанным с упомянутыми гидроприводами 13 и 14 управления. Двуплечий рычаг 19 установлен свободно на вертикальной оси I-I поворота опорно-поворотной колонки 7. Силовые гидроцилиндры упомянутых гидроприводов 13 и 14 ориентированы разнонаправленно и соединены своими штоками 20 и 21 гидроприводов 13 и 14 с кронштейнами 22 и 23. Кронштейн 22 закреплен на основании 1. Кронштейн 23 смонтирован на опорно-поворотной колонке 7.
Основание 1 (см. фиг. 9-15, 46 и 48) выполнено в виде полого толстостенного цилиндра, в котором надлежащим образом размещены неподвижная опора 15, верхняя балка 16, нижняя правая балка 17 и нижняя левая балка 18 и установленные на них кронштейны навески 3 и 4, кронштейн 22 и два разнесенных по высоте кронштейна 24 и 25 для шарнирного соединения опорно-поворотной колонки 7.
В верхней части основания 1 ниже кронштейнов 22 и 24 в сквозном квадратном отверстии установлена верхняя полая балка 16 сечением 100x100x8 мм. На полом цилиндре основания 1 установлена верхняя балка 16. Она расположена также как нижние балки 17 и 18 в радиальной плоскости и ортогонально к оси упомянутого цилиндра основания 1. Проекция верхней балки 16 размещена по середине между нижними балками 17 и 18. На нижних балках 17 и 18 попарно установлены образующие нижние кронштейны навески 3, 4 плиты с парами соосных втулок 55. Верхняя балка 16 снабжена образующей верхний кронштейн 2 парой щек 28 с соосными втулками 29. Торцы балки 16 закрыты заглушками 26 и 27. Балка 16 с основанием 1 соединена замкнутым сварным швом. Передний конец балки 16 снабжен парой щек 28, в технологических отверстиях которой сварными швами закреплены соосные втулки 29 для установки верхнего съемного пальца 30 диаметром 30 мм. Палец 30 имеет полусферическую головку 31 (см. фиг. 46), упругий элемент 32, заходную часть 33, ось 34 и фиксатор 35. Упругий элемент 32 исключает самопроизвольный поворот фиксатора 35 на оси 34 и аварийное смещение пальца 30 относительно соосных втулок 29.
Неподвижная опора 15 установлена соосно основанию 1 и размещена в его донной части 36. Опора 15 снабжена лапой 37, стойкой 38, косынками 39 и фланцем 40. В донной части основания 1 установлен фланец 40. Фланец 40 из листовой стали размещен на проточках стойки 38 и в донной части 36 основания 1 и с ними соединен замкнутыми герметичными кольцевыми швами. Верхняя часть стойки 38 имеет заглушку 41 (см. фиг. 14).
Выше донной части 36 размещена пара плит 42, в которых с удалением от вертикальной оси основания 1 размещены соосные втулки 43, оси которых совмещены с вертикальной осью I-I поворота опорно-поворотной колонки 7. Каждая плита 42 охватывает внешний периметр основания 1 и с ним соединена сварным замкнутым или прерывистым кольцевым швом. Соединение плит 42 с основанием 1 усилено косынками 44 и 45.
Нижние полые балки 17 и 18 сопряжены с основанием 1 следующим образом. В основании 1 (см. фиг. 15) выполнены технологические отверстия, в которых размещены концы полых балок 17 и 18. Концы балок 17 и 18 соединены сварными швами. Упомянутые балки 17 и 18 закрыты с торцевой части заглушками 46 и 47. Балки 17 и 18 взаимно соединены в горизонтальной плоскости плитой 48 с вертикальным ребром жесткости 49 в передней части. Плита 48 с основанием 1 дополнительно соединена косынкой 50. Положение горизонтальных балок 17 и 18 с основанием 1 усилено раскосами 51 и 52. Раскосы 51 и 52, плита 48 и косынка 50 обеспечивают требуемую жесткость конструкции основания 1.
На балках 17 и 18 вертикально размещены попарно установленные плиты 53 и 54, в которых смонтированы пары соосных втулок 55. Плиты 53, 54 и соосные втулки 55 на балках 17 и 18, соответственно, образуют кронштейны навески 3 и 4 для соединения с нижними продольными тягами навесной системы трактора посредством съемных пальцев 56 диаметром 35 мм (см. фиг. 48). Палец 56 содержит головку 57, упругий элемент 58, заходную часть 59, ось 60 и фиксатор 61.
Плита 48 соединена сварными швами не только с балками 17 и 18, но и с плитами 53 кронштейнов навески 3 и 4.
Консольные части нижних балок 17 и 18 снабжены диаметральными пазами 62 и 63 для фиксации требуемых положений выдвижных опор 5 и 6. В консольных частях нижних балок 18 и 17 выполнены между парами плит 53, 54 вертикальные соосные отверстия 64 для установки съемных пальцев 65 (см. фиг. 47). В зависимости от величины номинальной грузоподъемности манипулятора (1,5; 2,0; 3,0; 4,5 т) в технологических отверстиях балок 17 и 18 могут быть размещены дополнительные соосные вертикальные пары втулок 66 (см. 9-13, 15).
Верхняя часть основания 1 закрыта заглушкой 67, выполненной в виде тонкостенного диска. Диск заглушки 67 сварным швом соединен с торцевой частью основания 1. Ниже заглушки 67 размещены кронштейны 24 и 22. Дополнительный кронштейн 22 образован парой плит 68 и 69 и соосной парой втулок 70 для соединения осью со штоком силового гидроцилиндра гидропривода 13. Для шарнирного соединения опорно-поворотной колонки 7 с основанием 1 кронштейн 24 образован плитой 69 кронштейна 22 и плитой 71. В плитах 69 и 71 установлены соосные втулки 72. Плиты 69 и 71 с основанием 1 дополнительно соединены косынками 73 и 74.
Таким образом получен неразъемный узел основания 1, отвечающий требованиям прочности, конструктивной и технологической надежности и обеспечения проектной грузоподъемности.
Опорно-поворотная колонка 7 (см. фиг. 16-18, 45) содержит полую вертикально установленную штангу в виде толстостенной бесшовной трубы, верхняя и нижняя части которой закрыты заглушками 75 и 76. В нижней части штанги в диаметральном пазу в зависимости от модификации размещен кронштейн 77 для соединения либо с основанием гидропривода 11, либо кронштейн 78 для соединения со штоком 79 силового гидроцилиндра 11 (см. фиг. 1 и 45). Кронштейн 77 с внешней поверхностью штанги колонки 7 соединен сварными швами. На штанге ниже кронштейна 77 плитами 80 и 81 V-образным ребром жесткости 82 и втулкой 83 выполнен нижний кронштейн 84 для шарнирного соединения опорно-поворотной колонки 7 с основанием 1.
Верхняя часть полой штанги колонки 7 снабжена тремя кронштейнами 85, 86 и 23. Кронштейн 85 имеет Δ -образную форму и выполнен из толстолистовой стали. Кронштейн 85 предусмотрен для шарнирного соединения со стрелой 8. Кронштейн 85 установлен в диаметральном пазу полой штанги и с ней соединен сварным швом. На боковых стенках кронштейна 85 сварными швами соединены бочки 87 и 88.
Кронштейн 23 опорно-поворотной колонки 7 образован плитами 89 и 90 и парой соосно установленных втулок 91. Кронштейн 86 выполнен из плит 90 и 92, втулки 93 и ребра жесткости 94.
Кронштейны 78 и 77 имеют либо опорные соосные втулки 95 (см. фиг. 45), либо накладки 96 (см. фиг. 18).
Кронштейны 84 и 86 опорно-поворотной колонки 7 обеспечивают ее свободное угловое смещение вокруг оси I-I на угол не менее ±150o от продольно-вертикальной плоскости симметрии навесного манипулятора.
Стрела 8 (см. фиг. 19, 20, 42 и 43) выполнена в виде толстостенной трубы и имеет кронштейны 97 и 98 и пару соосных втулок 99. Кронштейн 97 имеет Δ-образную форму. Кронштейн 97 установлен в диаметральном пазу на торце 100 стрелы 8 для соединения с рукоятью 9. Сопряжение кронштейна 97 со стороны торца 100 усилено косынками 101 в виде сегментов. Торец стрелы 8 со стороны втулок 99 усилен косынками 102. Другие кронштейны 98 попарно установлены под углом к оси стрелы 8. Кронштейны 98 имеют соосные втулки 103 или отверстия для размещения осей 104 и 105 для соединения с основаниями гидроприводов 11 и 12 управления стрелой 8 и рукоятью 9 (см. фиг. 1 и 43). Кронштейны 98 выполнены одной деталью, а втулки 103 размещены по разные стороны от стрелы 8 (см. фиг. 19 и 43). Другая пара соосных втулок установлена на другом конце стрелы 8.
Рукоять 9 (см. 21-25 и 44) выполнена из полого профиля, предпочтительно круглого сечения. В полости рукояти 9 размещены три пары соосных опорных втулок 104, 105 и 106 и окна 107, 108 и 109. Пара втулок 105 рукояти 9 пальцем 110 (см. фиг. 44) сопряжена посредством пары подшипников скольжения 111 с Δ -образным кронштейном 97 стрелы 8. Втулки 104 с помощью оси 112 соединяют шток 113 силового гидроцилиндра гидропривода 12. Увеличение грузоподъемности рукояти 9 манипулятора достигается тем, что рукоять 9 выполнена составной, снабженной разнодлинными и разнотолщинными сопрягаемыми своими внешними и внутренними поверхностями полыми профилями 114 и 115. Упомянутые сопрягаемые профили 114 и 115 размещены в полости рукояти 9. Профили 114 и 115 смонтированы на наружной поверхности рукояти 9. На удаленном конце от пальца 110 в полости рукояти 9 размещены подвижные части в виде полых взаимно сопрягаемых профилей 116 и 117 преимущественно круглого сечения (см. фиг. 29-32). Рукоять снабжена подвижными частями в виде взаимно сопрягаемых профилей. На свободном конце соответствующей подвижной части установлен грузозахватный крюк 10. Подвижные части в полости рукояти 9 зафиксированы съемными пальцами.
Свободный конец профиля 117 снабжен ∪- образным пазом 118 и парой соосных втулок для шарнирной установки посредством оси 120 подвеса 121 грузозахватного крюка 10. Конец подвижного профиля 117 снабжен парой оппозитно установленных ручек 122. Положение оси 120 во втулках 119 зафиксировано планкой 123, в отверстии которой размещен болт 124 с пружинной шайбой. Болт 124 ввернут в резьбовую бонку 125 профиля 117. Бонка 125 одновременно является ограничителем смещения профиля 117 в полость профиля 116. Свободные концы подвижных частей рукояти 9 снабжены ручками 122 для перемещения этих частей и ограничителями 126 их предельных смещений.
Свободный конец профиля 116 снабжен ограничителем 126 перемещения в полость рукояти 9 и парой ручек 127. Положение профилей 116 и 117 в полости рукояти 9 и друг относительно друга зафиксировано съемными пальцами 128 и 129. Каждый из пальцев 128 и 129 имеет головку 130, стержень 131, упругий элемент 132, ось 133 и фиксатор 134 со стороны заходной части. В профилях 116 и 117 и на конце стрелы 9 выполнены соосные отверстия 135.
Грузозахватный крюк 10 установлен в траверсе, которая размещена на подвесе. Грузозахватный крюк 10 имеет блокиратор 136 положения строповочных устройств в своем зеве. Грузозахватный крюк 10 посредством упорного подшипника 137 установлен в траверсе 138, которая размещена на подвесе. Положение крюка 10 в траверсе 138 зафиксировано высокой гайкой 139, фасонной шайбой 140 и контргайкой 141. Траверса 138 размещена в технологическом отверстии 142 планки 143 подвеса 121. Траверса 138 с планкой 143 соединена сварными швами. Подвес 121 размещен на оси 120 посредством втулки 144 из закаленной стали. Подвес 121 установлен на оси 120 в полости соответствующей части рукояти.
Каждая выдвижная опора образована балкой с наклонной и горизонтальной частями. Упомянутые части балки снабжены соединяющим их ребром жесткости. Последнее выполнено в виде диска. Выдвижные опоры 5 и 6 (см. фиг. 1-8, 26-28, 47) имеют идентичную конструкцию. Основным грузонесущим элементом опор 5 и 6 являются Г-образные полые балки 145. Для фиксации требуемых положений выдвижных опор 5 и 6 в нижних балках 17 и 18 и опорах 5 и 6 выполнены соосные отверстия для съемных пальцев 65. На горизонтальном участке полой балки 145 выполнен ряд отверстий 146. Отверстия 146 предусмотрены для фиксирования съемными пальцами 65 положения опор 5 и 6 в полостях балок 17 и 18 основания 1 (см. фиг. 47). Нижний косой срез Г-образной полой балки 145 сопряжен с лапой 147. Со стороны нижнего косого среза каждая балка 145 снабжена лапой 147 и соединена с последней косынками. Нижняя плоскость лапы 147 с балкой 145 соединена сварными швами. Положение лапы 147 на балке 145 усилено косынками 148, 149 и 150. Лапа 147 образована штамповкой или отгибом отбортовок 151 и сваркой стыков. Каждая лапа 147 опоры 5 (6) снабжена отверстиями 152. В лапе 147 предусмотрены технологические отверстия 152 для обеспечения надежной работы манипулятора в сложных условиях. Надежное соединение горизонтальной и наклонной частей полых балок 145 обеспечено ребром жесткости 153, выполненным в виде диска и установленным в прорезях обеих балок (см. фиг. 26-28, 47). Диск ребра жесткости 153 выполнен с фасонным отверстием 154 для образования ручки. Диск ребра жесткости 153 служит одновременно фиксатором рабочего и транспортного положений лап 147 выдвижных опор 5 и 6 в горизонтальных и вертикальных прорезях 62 и 63 на консольных частях балок 17 и 18 основания 1. Таким образом каждая нижняя балка на торце выполнена с диаметрально ориентированными прорезями под упомянутый диск ребра жесткости балки этой опоры для его перестановки в упомянутых прорезях для фиксации транспортного положения и рабочего положения выдвижной опоры.
Возможность поворота опорно-поворотной колонки 7 вокруг вертикальной оси I-I основания 1 обеспечивается вертикально установленными осями 155 и 156 (см. фиг. 1, 39, 40 и 41). Ось 155 размещена в нижнем кронштейне 25 основания 1 и нижнем кронштейне 84 опорно-поворотной колонки 7 посредством однотипных подшипников скольжения 157, установленных с натягом во втулках 43 и 83. Вертикальное смещение оси 155 в кронштейнах 25 и 84 ограничено упором 158 сверху и шайбой 159 со шплинтом 160 снизу. Консистентная смазка подается через пресс-масленку 161 в осевые и радиальные 162 и 163 (см. фиг. 39 и 40).
Ось 156 размещена в верхнем кронштейне 24 основания 1 и верхнем кронштейне 86 опорно-поворотной колонки 7 посредством однотипных подшипников скольжения 164. Ось 156 имеет упор 165, который ограничивает ее перемещение вниз относительно кронштейнов 24 и 86. В нижней части оси 156 размещены плоская шайба 166 и шплинт 167, исключающие смещение оси 156 вверх. Выше упора 126 на оси 156 посредством пары подшипников скольжения 168 установлена втулка 169 двуплечего рычага 19. Положение рычага 19 на оси 156 зафиксировано фасонной гайкой 170. В верхней торцевой части оси 156 размещена пресс-масленка для подачи консистентной смазки по осевому и радиальным каналам в подшипники скольжения 164 и 168 (см. фиг. 41).
Управление положением грузозахватного крюка 10 посредством стрелы 8 и рукояти 9 при выполнении погрузочно-разгрузочных работ производится гидроприводами 11, 12, 13 и 14 дистанционно из кабины агрегатируемого трактора изменением положения гидрозолотников 171, 172 и 173 в гидрораспределителе 174 трактора (см. фиг. 1 и 35). Левая секция гидрораспределителя 174 трактора гидравлически соединена со штоковой и бесштоковой полостями силового гидроцилиндра гидропривода 11, шток 79 которого управляет положением стрелы 8. Бесштоковая полость силового гидроцилиндра соединена с гидрораспределителем 174 посредством дросселя 175 и обратного клапана 176. Правая секция гидрораспределителя 174 трактора гидравлически соединена со штоковой и бесштоковой полостями силового гидроцилиндра гидропривода 12, шток 113 которого управляет положением рукояти 9. Штоковая полость силового гидроцилиндра соединена с гидрораспределителем 174 посредством дросселя 177 и обратного клапана 178. Полости силовых гидроцилиндров гидроприводов 13 и 14 взаимно соединены гидравлически и перекрестно и параллельно через двухпозиционный распределительный кран 179 (см. фиг. 35 и 36) со средней секцией гидрораспределителя 174 трактора. Штоковые и бесштоковые полости силовых цилиндров гидроприводов 13 и 14 соединены с гидравлической сетью трактора посредством пары дросселей 180 и 181 и обратных клапанов 182 и 183.
Двухпозиционный распределительный кран 179 после установки основания 1 в рабочее положение позволяет дистанционно управлять механизмом поворота опорно-поворотной колонки 7.
Двухпозиционный распределительный кран 179 (см. фиг. 36) содержит корпус 184, который посредством трех болтов 185 закреплен на кронштейне 186 основания 1. В корпусе 184 выполнены три пары радиальных отверстий 187 и 188, которые взаимно смещены на угол 120±1o относительно оси корпуса 184. В резьбовых частях отверстий 187 и 188 ввернуты штуцеры 189 и 190, которые с помощью рукавов высокого давления 191, 192, 193, 194, 195 и 196 соединены соответственно с силовым гидроцилиндром 197 для управления гидронавесной системой трактора (см. фиг. 35), с силовыми гидроцилиндрами управления гидроприводами 13 и 14 и со средней секцией гидрораспределителя 174 трактора. Гидрозолотник крана 179 имеет проточки 198 и 199 для перераспределения рабочей жидкости с пары рукавов 195, 196 либо на рукава 193, 194, либо на рукава 191 и 192. Гидрозолотник крана 179 установлен в корпусе 184 посредством глухой резьбовой заглушки 200 и сквозной резьбовой пробки 201. Пробка 201 снабжена соответствующим уплотнением. Резьбовой шток 202 золотника посредством гайки 203 и пружинной шайбы 204 ограничивает осевое смещение рычага 205. Двуплечий рычаг 205 на выступающей части золотника крана 179 установлен на шпонке. Свободный конец рычага 205 имеет прилив 206. Второе плечо имеет ручку для привода. Прилив 206 имеет цилиндрическое углубление, в котором установлены шаровый элемент 207 и пружина сжатия. На торцевой части корпуса 184 выполнены два углубления 208, которые взаимно смещены относительно оси гидрозолотника на угол 120±1o. Углубления 208 посредством шарового элемента 207 фиксируют одно из положений рычага 205.
Силовой гидроцилиндр гидропривода 11 (см. фиг. 37) с гидравлической сетью агрегатируемого трактора соединен рукавами и трубопроводами высокого давления. Из-за больших габаритов гильзы 209 основания гидропривода 11 его штоковая и бесштоковая полости соединены трубопроводами 210 и 211 и рукавами 212 и 213. Накидные гайки 214 и 215 рукавов 212 и 213 соединены с магистральными трубопроводами, жестко закрепленными на поверхности стрелы 8. Короткими рукавами соединяют только подвижные части в местах шарнирных соединений стрелы 8 и рукояти 9, стрелы 8 и опорно-поворотной колонки 7. Трубопроводы 210 и 211 на поверхности гильзы 209 соединены хомутами 216.
Силовой гидроцилиндр гидропривода 12 (см. фиг. 38) имеет аналогичную конструкцию. Трубопроводы 210 и 211 с рукавами 217 и 218 соединены посредством переходных уголков 219, обеспечивающих требуемое соединение рукавов 217 и 218 со второй парой магистральных трубопроводов стрелы 8.
Манипулятор работает следующим образом.
Агрегатируемый трактор задним ходом подают к кронштейнам навески 2, 3, 4 основания 1. Далее съемные пальцы 30 и 56 извлекают из соосных втулок 29 верхнего кронштейна 28 и соосных втулок 55 левого и правого нижних кронштейнов 3 и 4. Усилием ладони через полусферическую головку 31 тело стержня, например пальца 30, механизатор смещает в сторону заходной части 33. Витки упругого элемента 32 (пружины равного сопротивления) сжимаются. Фиксатор 85 поворачивают на оси 34 таким образом, чтобы длинная ось фиксатора совпала с осью пальца 30. Далее механизатор освобождает головку 31. Под воздействием сжатых витков упругого элемента 32 палец 30 смещается из втулок 29. Аналогичным образом извлекают пальцы 56 из втулок 55 кронштейнов 3 и 4. Далее нижние тяги (см. фиг. 5, 7, 48) вводят в межвтулочное пространство и соединяют в обратном порядке с пальцами 56. Положение пальцев 56 во втулках 55 должно соответствовать изображению, показанному на фиг. 48. После этого палец 30 соединяют с шаровым шарниром центральной верхней тяги. Резьбовой гайкой центральной верхней тяги строго по отвесу устанавливают основание 1.
Далее рукавами высокого давления соединяют гидроприводы 11 и 12 с гидрозолотниками 171 и 172, а через распределительный кран 179 - с гидрозолотником 172. При гидравлическом соединении гидрозолотника 172 с распределительным краном 179 производится дистанционное управление силовыми гидроцилиндрами гидроприводов 13 и 14. Переводом ручек управления гидрозолотников 171-173 добиваются нормального функционирования гидроприводов 11-14. Поворотом рычага 205 (см. фиг. 36) гидрозолотник крана управления 179 полости силового гидроцилиндра 197 соединяют со средней секцией гидрораспределителя трактора, а положением гидрозолотника 172 добиваются требуемого положения основания 1 (в транспортное - см. фиг. 6-8 или рабочее - см. фиг. 1-5). Манипулятор готов для перемещения к объекту выполняемых работ.
После завершения транспортных операций тракторист сначала выдвижные опоры 5 и 6 переводит в рабочее состояние (см. фиг. 47 и др.). Он же съемные пальцы 65 извлекает из отверстий 146. Механизатор балки 146 опор 5 и 6 выдвигает из полостей балок 17 и 18 и устанавливает их в рабочее положение (см. фиг. 4 и 5). Пальцами 65 машинист блокирует положение Г-образных балок 145 в полостях балок 17 и 18. Далее оператор тягами гидронавесной системы трактора основание 1 устанавливает на три опоры 15, 5 и 6. Основание 1 вместе с подвижными узлами занимает устойчивое рабочее положение. Гидрозолотник крана 179 тракторист переводит в положение для управления механизмом поворота колонки 7.
Изменением положения гидрозолотников 171 и 173 добиваются требуемого положения грузозахватного крюка 10 по отношению к оси I-I основания 1 и над опорной поверхностью. При перемещении гидрозолотника 172 средней ручкой из положения "Нейтральное" в положение "Подъем" масло под давлением одновременно поступает в бесштоковую полость гидропривода 13 и в штоковую полость гидропривода 14. Перемещение штоков 20 и 21 гидроприводов 13 и 14 приводит к тому, что двуплечий рычаг 19 поворачивается относительно оси 156 и увлекает за собой кронштейн 23 опорно-поворотной колонки 7. Вместе с колонкой 7 в горизонтальной плоскости поворачиваются стрела 8 и рукоять 9 вместе с грузозахватным крюком 10. От среднего положения по ходу погрузочного агрегата стрела 8 поворачивается налево. Для изменения направления поворота достаточно гидрозолотник 172 из положения "Подъем" перевести в фиксированное положение "Опускание". Конструктивно-компоновочная схема основания 1 позволяет механизмом гидроприводов 13 и 14 поворачивать опорно-поворотную колонку 7 в горизонтальной плоскости с равной угловой скоростью в пределах 300±3o.
Подвижные части 117 и 116 рукояти 9 существенно увеличивают зону обслуживания манипулятора.
Таким образом, изложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в сельскохозяйственном машиностроении;
для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте нижеприведенной формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителями технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
Изобретение относится к грузоподъемной технике. Манипулятор содержит основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси опорно-поворотную колонку со смонтированной на ней стрелой, рукоять с грузозахватным крюком, гидроприводы управления стрелой и рукоятью и механизм поворота опорно-поворотной колонки, включающей в себя гидроприводы управления этой колонкой. Основание снабжено неподвижной опорой и выполнено в виде полого цилиндра, имеющего ориентированные в радиальных плоскостях и ортогонально установленные к оси цилиндра нижние балки, в которых установлены упомянутые выдвижные опоры, при этом угол раствора нижних балок меньше 180o, опорно-поворотная колонка выполнена в виде полой штанги, а механизм поворота снабжен двуплечим рычагом, кинематически связанным с упомянутыми гидроприводами управления механизма поворота. Упомянутый двуплечий рычаг установлен свободно на вертикальной оси поворота опорно-поворотной колонки, а гидроцилиндры упомянутых гидроприводов ориентированы разнонаправленно и соединены своими штоками с кронштейнами, один из которых закреплен на основании, а другой - на опорно-поворотной колонке. Изобретение обеспечивает расширение зоны обслуживания. 19 з.п. ф-лы, 48 ил.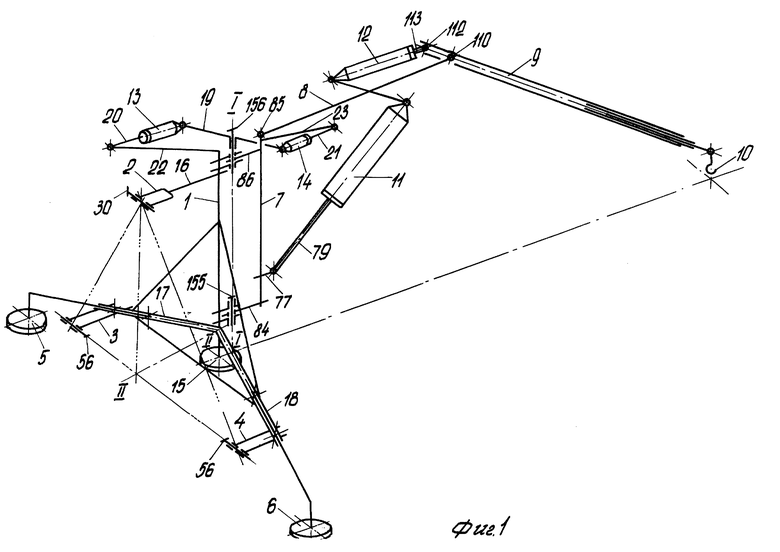
γ = 2π-α,
где α - угол поворота опорно-поворотной колонки.
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Способ контроля геометрии многолезвийного режущего инструмента | 1984 |
|
SU1229557A1 |
| US 3533515 А, 13.10.1970 | |||
| Механизм поворота колонны стрелового крана | 1987 |
|
SU1463708A1 |
