Изобретение относится к технике записи и/или воспроизведения информации с взаимным относительным перемещением оптического носителя и оптической головки и может быть использовано в информационной технике, например в устройствах цифровой видеозаписи, в устройствах цифровой звукозаписи, в оптических внешних запоминающих устройствах ЭВМ.
Известен способ формирования сигналов рассогласования, реализуемый устройством, содержащим оптически связанные трехлучевой источник излучения, светоделитель, с вторым оптическим выходом которого через неподвижный фокусирующий объектив и цилиндрическую линзу сопряжен трехплощадочный фотоприемник, подвижный фокусирующий объектив и подвижный оптический носитель информации, на котором центры лучей поперек чередующихся опорных и информационных дорожек смещены на четверть шага записи, а также электроприводы фокусировки и слежения за дорожкой, входы которых электрически связаны с центральной площадкой фотоприемника. Крайние площадки фотоприемника выполнены одноэлементными, а центральная четырехэлементной. При этом на каждую из трех площадок фотоприемника проектируется свой отраженный луч [1]
Недостатками способа являются невысокие точность и надежность слежения систем автофокусировки и слежения за дорожкой из-за двусвязанности датчиков сигналов рассогласования, а также наличия мультипликативных помех от содержащихся на информационных дорожках питов записи, что в конечном счете снижает точность и надежность записи и воспроизведения информации.
Наиболее близким по технической сущности и достигаемому результату к предложенному является способ формирования сигналов рассогласования систем автофокусировки и слежения за информационной дорожкой, реализуемый устройством, содержащим оптически связанные трехлучевой источник излучения, светоделитель, с вторым оптическим выходом которого через неподвижный фокусирующий объектив и цилиндрическую линзу сопряжен трехплощадочный фотоприемник, каждая из площадок которого выполнена четырехэлементной, подвижный фокусирующий объектив и подвижный оптический носитель информации, на котором центры лучей поперек чередующихся опорных и информационных дорожек смещены на четверть шага записи, а также электроприводы фокусировки и слежения за дорожкой, к входам которых выходы всех площадок фотоприемника подключены через датчики сигналов рассогласования и электронные ключи с подключенным к их управляющим входам селектором по уровню сигналов рассогласования, при этом на каждую из трех площадок фотоприемника проектируется свой отраженный луч [2]
Недостатками способа являются невысокие точность и надежность слежения систем автофокусировки и слежения за дорожкой из-за двусвязанности датчиков сигналов рассогласования, а также наличия мультипликативных помех от содержащихся на информационных дорожках питов записи, что в конечном счете снижает точность и надежность записи и воспроизведения инфорации.
Целью изобретения является повышение точности и надежности слежения систем автофокусировки и слежения за дорожкой за счет значительного уменьшения двусвязанности их датчиков сигналов рассогласования.
Поставленная цель достигается тем, что в способе формирования сигналов рассогласования систем автофокусировки и слежения за дорожкой на подвижном оптическом носителе информации, на котором излучаемые трехлучевым лазерным источником излучения лучи смещены друг относительно друга поперек дорожек на четверть шага записи, с использованием трехплощадочного фотоприемника, по меньшей мере боковые площадки которого выполнены четырехэлементными и на каждую из площадок которого через фокусирующий объектив и цилиндрическую линзу падает отраженный от подвижного оптического носителя информации луч, сигнал рассогласования системы автофокусировки формуют путем вычитания из суммы фототоков диагонально объединенных и одинаково ориентированных элементов боковых площадок трехплощадочного фотоприемника суммы фототоков других четырех диагонально объединенных и одинаково ориентированных элементов этих же боковых площадок фотоприемника, а сигнал рассогласования системы слежения за дорожкой формируют путем вычитания из суммы фототоков четырех элементов одной боковой площадки трехплощадочного фотоприемника суммы фототоков четырех элементов другой его боковой площадки.
Формирование сигнала рассогласования системы автофокусировки с использованием фототоков двух четырехэлементных боковых площадок трехплощадочного фотоприемника позволяет в силу высокой степени постоянства суммарной освещенности боковых площадок фотоприемника (при указанном положении трех падающих лучей на дорожках подвижного оптического носителя информации) при любом положении лучей относительно опорных и информационных дорожек практически полностью устранить зависимость величины сигнала рассогласования системы автофокусировки от сигнала рассогласования системы слежения за дорожкой, т.е. уменьшить двусвязанность его датчика. Этим повышается точность и надежность работы системы автофокусировки. Одновременно двусвязность датчика сигнала рассогласования системы слежения за дорожкой уменьшается в результате отказа при формировании этого сигнала от использования астигматического метода. Тем самым повышается точность и надежность работы системы слежения за дорожкой, которая в силу остаточной двусвязности ее датчика сигнала рассогласования повышается также из-за увеличения точности и надежности работы системы автофокусировки. Кроме того, точность и надежность работы систем автофокусировки и слежения за дорожкой повышается в результате уменьшения влияния питов записи на интенсивность отраженных боковых лучей, которые на информационную дорожку падают лишь частично. Все это в конечном счете повышает точность и надежность записи и/или воспроизведения информации в оптико-механических запоминающих устройствах.
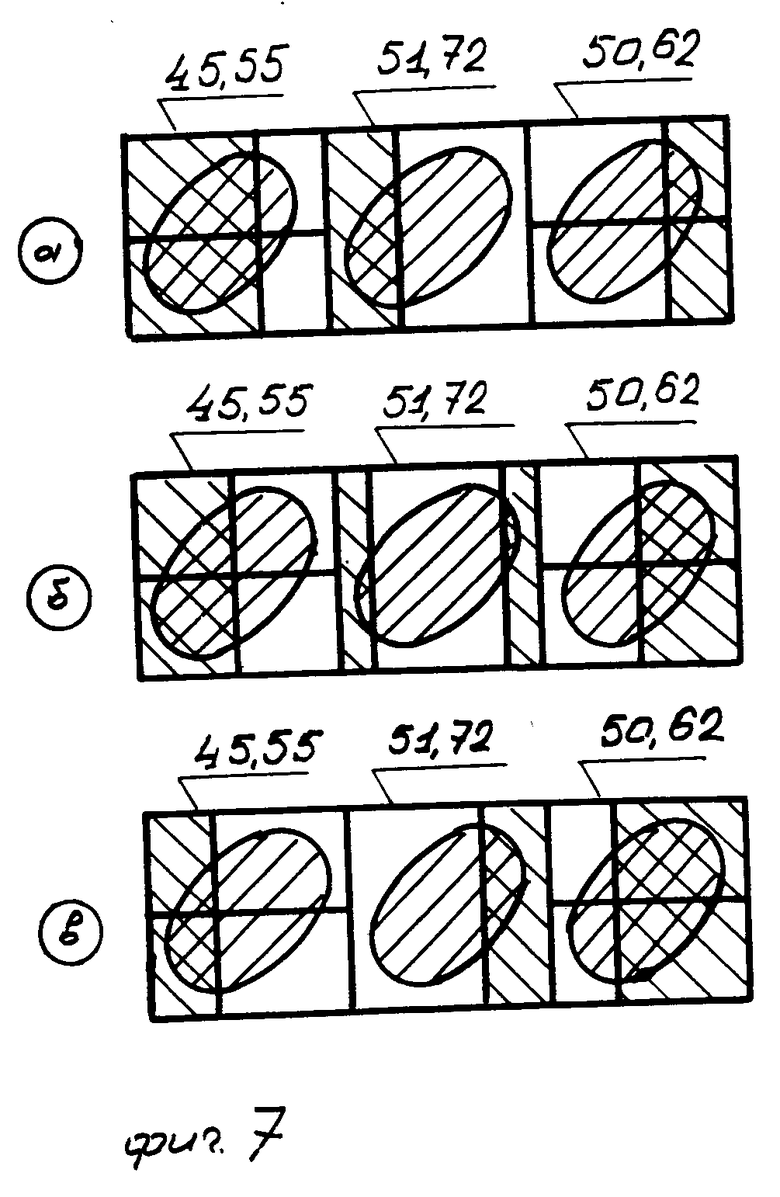
На фиг. 1 представлен вариант реализации способа с подвижной оптической головкой и дисковым оптическим носителем информации; на фиг.2 вариант реализации способа с неподвижной оптической головкой и цилиндрическим оптическим носителем информации; на фиг.3 пример реализации фотоприемника с подключенными к его выходу датчиками сигналов рассогласования систем автофокусировки и слежения за дорожкой; на фиг.4 другой пример реализации фотоприемника с подключенными к его выходу датчиками сигналов рассогласования систем автофокусировки и слежения за дорожкой; на фиг.5 эпюры токов и напряжений в схеме, изображенной на фиг.3, 4; на фиг.6 форма световых пятен на трехплощадочном фотоприемнике при различных взаимных положениях подвижного фокусирующего объектива и регистрирующего слоя на оптическом носителе информации и их фиксированном положении относительно опорных и информационных дорожек; на фиг. 7 форма световых пятен на трехплощадочном фотоприемнике при фиксированном взаимном положении подвижного фокусирующего объектива и регистрирующего слоя на оптическом носителе информации и различном их положении относительно опорных и информационных дорожек.
При реализации способа сигнал рассогласования системы автофокусировки формируется в соответствии с выражением:
Uаф R x [(iф1+iф3+iф5+iф7)
(iф2+iф4+iф6+iф8), (1) а сигнал рассогласования системы слежения за дорожкой в соответствии с выражением
Uсл R x [(iф1+iф2+iф3+iф4)
(iф5+iф6+iф7+iф8)] (2) где iф1, iф2, iф3, iф4 фототоки четырех элементов одной боковой площадки трехплощадочного фотоприемника;
iф5, iф6, iф7, iф8 фототоки четырех элементов другой боковой площадки трехплощадочного фотоприемника;
R некоторый коэффициент пропорциональности, имеющий размерность сопротивления.
Фототоки iф1, iф3, iф5, iф7 снимаются с расположенных на одинаково ориентированных диагоналях обеих боковых площадок элементов, а фототоки iф2, iф4, iф6, iф8 с расположенных на диагоналях ориентированных перпендикулярно ранее упомянутым диагоналям элементов боковых площадок трехплощадочного фотоприемника.
Для реализации способа применяют устройство записи (и)или воспроизведения информации, функциональная схема которого изображена на фиг.1.
Устройство содержит оптически связанные подвижную оптическую головку 1 и дисковый оптический носитель 2 информации. Подвижная оптическая головка 1, в свою очередь, содержит оптически связанные трехлучевой источник 3 лазерного излучения (например, в виде линейки полупроводниковых лазеров или полупроводникового лазера со светорасщепителем), светоделитель 4 (например, поляризационный с размещенной за ним четвертьволновой пластинкой, не показана, с вторым оптическим выходом которого через неподвижный фокусирующий объектив 5 и цилиндрическую линзу 6 сопряжен трехплощадочный фотоприемник 7, боковые площадки которого выполнены четырехэлементными (фиг.3, 4), и подвижный фокусирующий объектив 8. Подвижная оптическая головка 1 содержит также электропривод 9 (например, линейный электродвигатель) перемещения подвижного фокусирующего объектива 8, с которым он связан кинематически. Дисковый оптический носитель 2 информации содержит прозрачную для лазерного излучения подложку 10 (например, из стекла, кварца, оргстекла), на противоположную лазерному излучению поверхность которой нанесена регистрирующая среда 11 (например, халькогенидная, металлоорганическая). К электрическому выходу фотоприемника 7, точнее к выходам его боковых площадок (фиг.3,4) подключены датчики сигналов рассогласования систем автофокусировки 12 и слежения за дорожкой 13. Выход датчика 12 сигнала рассогласования системы автофокусировки подключен к электроприводу 9 фокусировки. Выход датчика 13 сигнала рассогласования системы слежения за дорожкой подключен к электроприводу 14 (например, линейному электродвигателю любой известной реализации) радиального (относительно дискового оптического носителя 2 информации) перемещения подвижной оптической головки 1, с которой он связан кинематически. Выход "Воспроизведение" подключен к выходу центральной площадки фотоприемника 7 (см. фиг.3, 4), вход "Запись" к трехлучевому лазерному источнику 3 излучения.
Для реализации способа применяют также устройство записи и/или воспроизведения информации, функциональная схема которого изображена на фиг.2. Устройство содержит оптически связанные неподвижную оптическую головку 15 и цилиндрический оптический носитель 16 информации. Неподвижная оптическая головка 15, в свою очередь, содержит оптически связанные трехлучевой источник 17 лазерного излучения, светоделитель 18, с вторым оптическим выходом которого через неподвижный фокусирующий объектив 19 и цилиндрическую линзу 20 сопряжен трехплощадочный фотоприемник 21, боковые площадки которого выполнены четырехэлементными (фиг.3, 4), и подвижный фокусирующий объектив 22. Неподвижная оптическая головка 15 содержит также электропривод 23 перемещения подвижного фокусирующего объектива 22, с которым он связан кинематически. Цилиндрический оптический носитель 16 информации выполнен в виде трубчатой прозрачной для лазерного излучения подложки 24, на внутреннюю поверхность которой нанесена регистрирующая среда 25. На торцах трубчатой подложки 24 закреплены (например, приклеены) ротор 26 электропривода вращения и якорь 27 электропривода осевого перемещения. Цилиндрический оптический носитель 16 информации заключен в герметичный контейнер 28, внутренняя полость 29 которого заполнена иммерсионной жидкостью (например, полиметилсилоксаном, водно-глицериновой смесью, этанолом). В боковой стенке герметичного контейнера 28 напротив неподвижной оптической головки 15 имеется прозрачное для лазерного излучения окно 30. На торцевых участках наружной боковой поверхности герметичного контейнера 28 размещены статоры электроприводов вращения 31 и осевого перемещения 32, заключая в своей внутренней полости ротор 26 и якорь 27 соответственно. К электрическому выходу фотоприемника 21 (точнее к выходам его боковых площадок фиг.3, 4) подключены датчики сигналов рассогласования систем автофокусировки 33 и слежения за дорожкой 34. Выход датчика 33 сигнала рассогласования системы автофокусировки подключен к электроприводу 23 фокусировки. Выход датчика 34 сигнала рассогласования системы слежения за дорожкой подключен к статору 32 электропривода осевого перемещения цилиндрического оптического носителя 16 информации. Выход "Воспроизведение" подключен к выходу центральной площадки фотоприемника 21 (фиг.3, 4), вход "Запись" к трехлучевому лазерному источнику 17 излучения.
Датчики сигналов рассогласования систем автофокусировки 12, 33 и слежения за дорожкой 13, 34, общая функциональная схема которых изображена на фиг.3, содержат первый 35, второй 36, третий 37 и четвертый 38 четырехвходовые сумматоры, а также первый 39 и второй 40 двухвходовые разностные усилители. К входам первого четырехвходового сумматора 35 подключены первый 41, второй 42, третий 43 и четвертый 44 элементы боковой площадки 45 фотоприемника 7(21). К входам второго четырехвходового сумматора 36 подключены первый 46, второй 47, третий 48 и четвертый 49 элементы другой боковой площадки 50 фотоприемника 7(21). К входам третьего четырехплощадочного сумматора 37 подключены диагонально объединенные второй 42, четвертый 44 элементы первой боковой площадки 45 и второй 47, четвертый 49 элементы другой боковой площадки 50 фотоприемника 7(21). К входам четвертого четырехплощадочного сумматора 38 подключены диагонально объединенные первый 41, третий 43 элементы первой боковой площадки 45 и первый 46, третий 48 элементы второй боковой площадки 50 фотоприемника 7(21). Выходы первого 35 и второго 36 четырехплощадочных сумматоров подключены к входу первого разностного усилителя 39, выход которого подключен к электроприводу 14(32) слежения за дорожкой. Выходы третьего 37 и четвертого 38 четырехвходовых сумматоров подключены к входам второго двухвходового разностного усилителя 40, выход которого подключен к электроприводу 9(23) фокусировки. Выход центральной площадки 51 фотоприемника 7(21) является выходом "Воспроизведение" устройства.
В датчиках сигналов рассогласования 12, 33 и слежения за дорожкой 13, 34, общая функциональная схема которых изображена на фиг.4, четырехвходовые сумматоры, упоминавшиеся в предыдущей реализации датчиков сигналов рассогласования 12, 33, 13, 34, выполнены на базе двухвходовых сумматоров. Сделано это следующим образом. К входам первого двухвходового сумматора 52 подключены диагонально объединенные первый 53 и третий 54 элементы боковой площадки 55 фотоприемника 7(21). К входам второго двухвходового сумматора 56 подключены диагонально объединенные второй 57 и третий 58 элементы боковой площадки 55 фотоприемника 7(21). К входам третьего двухвходового сумматора 59 подключены диагонально объединенные первый 60 и третий 61 элементы другой боковой площадки 62 фотоприемника 7(21). К входам четвертого двухвходового сумматора 63 подключены диагонально объединенные второй 64 и четвертый 65 элементы боковой площадки 62 фотоприемника 7(21). Выходы первого 52 и второго 56 двухвходовых сумматоров подключены к входам двухвходовых первого разностного усилителя 66 и пятого сумматора 67. Выходы третьего 59 и четвертого 63 двухвходовых сумматоров подключены ко входам второго двухвходового разностного усилителя 68 и шестого двухвходового сумматора 69. Выходы пятого 67 и шестого 69 двухвходовых сумматоров подключены к входам третьего двухвходового разностного усилителя 70. Выходы первого 66 и второго 68 двухвходовых разностных усилителей подключены к входам седьмого двухвходового сумматора 71. Таким образом, первый четырехвходовой сумматор 35 предыдущей реализации здесь реализован совокупностью первого 52, второго 56 и пятого 67 двухвходовых сумматоров. Второй четырехвходовый сумматор 36 предыдущей реализации здесь реализован совокупностью третьего 59, четвертого 63 и шестого 69 двухвходовых сумматоров. Третий четырехвходовый сумматор 37 предыдущей реализации здесь реализован совокупностью первого 52, второго 56, и седьмого 71 двухвходовых сумматоров. Четвертый четырехвходовый сумматор 38 предыдущей реализации здесь реализован совокупностью третьего 59, четвертого 63 и седьмого 71 двухвходовых сумматоров. Первому двухвходовому разностному усилителю 39 предыдущей реализации здесь соответствует третий двухвходовый разностный усилитель 70. Второму двухвходовому разностному усилителю 40 предыдущей реализации здесь соответствует первый 66 и второй 68 двухвходовые разностные усилители (два вместо одного, так как они включены до, а не после двухвходового сумматора 71). Сигнал воспроизведения здесь, как и в предыдущей реализации, снимается с центральной площадки 72 трехплощадочного фотоприемника 7(21).
Возможны и иные варианты реализации способа, отличающиеся иной реализацией выражений (1) и (2), которые могут быть получены (аналогично приведенной на фиг.4 реализации) на основе ассоциативного и коммуникативного законов алгебраического суммирования применительно к алгебраической сумме восьми слагаемых (соответствующих фототокам двух четырехэлементных боковых площадок трехплощадочного фотоприемника).
Устройство записи и/или воспроизведения информации, функциональная схема которого приведена на фиг.1, работает следующим образом. Перед началом работы сменный дисковый оптический носитель 2 информации устанавливается на шпиндель электропривода вращения (не показан), которым затем раскручивается до номинальной скорости вращения. Затем электроприводом 14 радиального перемещения подвижной оптической головки 1 последняя устанавливается в такое положение, при котором лазерное излучение падает на информационную дорожку с заданным адресом. Но поскольку в процессе вращения дискового оптического носителя 2 информации имеют место радиальные и осевые биения, на выходе датчиков сигналов рассогласования систем автофокусировки 12 и слежения за дорожкой 13 появляются сигналы, воздействующие на электроприводы фокусировки 9 и радиального перемещения 14 подвижной оптической головки 1. Этими электроприводами излучаемое подвижной оптической головкой 1 лазерное излучение отрабатывает биения дискового оптического носителя 2 информации с точностью, достаточной для записи подаваемой извне информации или ее воспроизведения.
Устройство записи и/или воспроизведения информации, функциональная схема которого приведена на фиг.2, работает следующим образом. Перед началом работы сменный цилиндрический оптический носитель 16 информации, заключенный в герметичный контейнер 28, вставляется в статоры электроприводов вращения 31 и осевого перемещения 32. Под воздействием электромагнитного поля статора 31 электропривода вращения на его ротор 26 цилиндрический оптический носитель 16 информации раскручивается до номинальной скорости вращения. Затем под воздействием электромагнитного поля статора 32 электропривода осевого перемещения на якорь 27 цилиндрический оптический носитель 16 информации перемещается относительно неподвижной оптической головки 15 в такое положение, при котором лазерное излучение падает на информационную дорожку с заданным адресом. Но так как в процессе вращения цилиндрического оптического носителя 16 информации имеют место радиальные и осевые биения, на выходе датчиков сигналов рассогласования систем автофокусировки 33 и слежения за дорожкой 34 появляются сигналы, воздействующие на электроприводы фокусировки 23 и осевого перемещения (включающего в себя статор 32 и якорь 27) цилиндрического оптического носителя 16 информации внутри герметичного контейнера 28. Этими электроприводами излучаемое неподвижной оптической головкой 15 лазерное излучение отрабатывает биения цилиндрического оптического носителя 16 информации с точностью, достаточной для записи подаваемой извне информации или ее воспроизведения. Заполнение внутренней полости 29 герметичного контейнера 28 иммерсионной жидкостью повышает надежность записи и воспроизведения информации, поскольку демпфирует биения цилиндрического оптического носителя 16 информации, а также делает невидимыми для лазерного излучения нарушения геометрии и дефекты наружной поверхности трубчатой подложки 24.
Датчики сигналов рассогласования систем автофокусировки 12, 33 и слежения за дорожкой 13, 34, общая функциональная схема которых изображена на фиг.3, работают следующим образом. При перемещении поперек чередующихся опорных (на фиг. 5 заштрихованы) и информационных (на фиг.5 не заштрихованы) дорожек излучаемых подвижной 1 или неподвижной 15 оптической головкой трех лазерных лучей переменные составляющие фототоков боковых площадок 45, 50 (а также каждой пары из входящих в них и одинаково расположенных элементов) изменяются в противофазе (фиг.5,а), причем мгновенные значения этих переменных составляющих равны, когда центральный луч (которым осуществляется запись и считывание информации) находится точно на середине информационной дорожки. Следовательно, разность сигналов суммарных фототоков (фиг.5,б) боковых площадок 45, 50 фотоприемника 7(21) формируемая первым двухвходовым разностным усилителем 39, соответствует сигналу рассогласования системы слежения за дорожкой, поэтому также суммы сигналов на выходах третьего 37 и четвертого 38 четырехвходовых сумматоров указанной переменной составляющей уже не содержат (нетрудно заметить, что в каждой паре элементов на разных боковых площадках 45, 50 эти переменные составляющие находятся в противофазе и поэтому при суммировании взаимно уничтожаются), но эти постоянные составляющие на выходах третьего 37 и четвертого 38 четырехвходовых сумматоров на самом деле постоянны (фиг.5,в) только при этом условии, что расфокусировка луча не изменяется. При таком условии сигнал рассогласования системы автофокусировки на выходе второго разностного усилителя 40 (фиг.5,г) также будет иметь постоянную величину (если, конечно, ширина опорных и информационных дорожек не будет изменяться) при любых перемещениях лазерных лучей поперек дорожек, т. е. двусвязность такого датчика практически полностью устранена. При изменении же расстояния между подвижным фокусирующим объектом 8(22) и регистрирующим слоем 11(25) оптического носителя 2(16) информации из-за наличия в обратном ходе лазерных лучей цилиндрической линзы 6(20) световые пятна на всех трех площадках 45, 50, 51 фотоприемника 7(21) будут принимать эллиптическую форму (фиг. 6) с изменяющимся соотношением величин полуосей, поэтому сигнал на выходе второго разностного усилителя 40 будет изменяться известным для астигматических датчиков образом, но в отличие от всех известных реализаций астигматических датчиков в описываемом датчике сигнала рассогласования системы автофокусировки величина последнего от положения лучей относительно дорожек (фиг.7) не зависит.
Датчики сигналов рассогласования систем автофокусировки 12,33 и слежения за дорожкой 13,34, общая функциональная схема которых изображена на фиг.5, работают аналогично описанным выше их реализациям образом. Сигнал рассогласования системы автофокусировки, снимаемый с выхода седьмого двухвходового сумматора 71, содержит в себе те же, что и в предыдущей реализации, слагаемые, соответствующие согласно выражению (1) неинвертированным фототокам первого 53 и третьего 54 элементов (соответствующие сигналы на выход прошли через второй 56, седьмой 71 двухвходовые сумматоры и первый двухвходовый разностный усилитель 66) первой боковой площадки трехплощадочного фотоприемника 7, 21, неинвертированным фотококам первого 60 и третьего 61 элементов (соответствующие сигналы на выход прочли через четвертый 63, седьмой 69 двухвходовые сумматоры и второй двухвходовый разностный усилитель 68) другой боковой площадки 62 фотоприемника 7(21) и инвертированным фототокам второго 57 и четвертого 58 элементов (соответствующие сигналы на выходы прошли через первый 52, седьмой 71 двухвходовые сумматоры и первый двухвходовый разностный усилитель 66) первой боковой площадки 55 фотоприемника 7(21), а также инвертированным фототокам второго 64 и четвертого 65 элементов (соответствующие сигналы прошли на выходы через третий 59 и седьмой 71 двухвходовые сумматоры и второй двухвходовый разностный усилитель 68) другой боковой площадки 62 фотоприемника 7(21). Сигнал рассогласования системы слежения за дорожкой, снимаемый с выхода третьего двухвходового разностного усилителя 70, содержит в себе те же, что и в предыдущей реализации, слагаемые, соответствующие согласно выражению (2) неинвертированным фототокам первого 53 и третьего 54 элементов (соответствующие сигналы на выход прошли через второй 56, пятый 67 двухвходовые сумматоры и третий двухвходовый разностный усилитель 70), неинвертированным фототокам второго 57 и четвертого 58 элементов (соответствующие сигналы на выход прошли через первый 52, пятый 67 двухвходовые сумматоры и третий двухвходовый разностный усилитель 70) первой боковой площадки 55 фотоприемника 7(21) и инвертированным фототокам первого 60 и третьего 61 элементов (соответствующие сигналы на выход прошли через четвертый 63, шестой 69 двухвходовые сумматоры и третий 70 двухвходовый разностный усилитель), а также инвертированным фототокам второго 64 и четвертого 65 элементов (соответствующие сигналы на выход прошли через третий 59, шестой 69 двухвходовые сумматоры и третий разностный усилитель 70) другой боковой площадки 62 фотоприемника 7(21). Как видно, сигналы рассогласования систем автофокусировки и слежения за дорожкой в описываемой реализации датчиков 12, 33, 13, 34 получены те же, что и в предыдущем случае. Так же, как и в предыдущем случае, сигнал воспроизведения снимается с центральной площадки 70 трехплощадочного фотоприемника 7(21).
За счет практически полного устранения в способе двусвязности сигналов рассогласования систем автофокусировки и слежения за дорожкой обеспечивается существенное повышение точности и надежности слежения. Дополнительным его достоинством является высокая точность и надежность работы системы автофокусировки также в режиме пересчета дорожек.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи и/или воспроизведения с информационных дорожек подвижного носителя | 1990 |
|
SU1800479A1 |
| Оптико-механическое запоминающее устройство | 1990 |
|
SU1753489A1 |
| Оптико-механическое запоминающее устройство | 1990 |
|
SU1753488A1 |
| Устройство слежения за информационной дорожкой оптического носителя информации | 1990 |
|
SU1777172A1 |
| ОПТИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1989 |
|
SU1835958A1 |
| ЦИЛИНДРИЧЕСКИЙ ОПТИЧЕСКИЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 1992 |
|
RU2010357C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1989 |
|
SU1835959A1 |
| Устройство слежения за информационной дорожкой носителя оптической записи | 1988 |
|
SU1638724A1 |
| НОСИТЕЛЬ ИНФОРМАЦИИ | 1992 |
|
RU2010358C1 |
| Лазерный звукосниматель | 1988 |
|
SU1509994A1 |






Использование: в области записи и/или воспроизведения информации с взаимным перемещением оптического носителя и оптической головки и может быть использовано в информационной технике, например в устройствах цифровой видеозаписи. Целью изобретения является повышение точности и надежности слежения, при формировании сигналов рассогласования систем автофокусировки и слежения за дорожкой на подвижном оптическом носителе информации. Этот сигнал формируют путем вычитания из суммы фототоков диагонально объединенных и одинаково ориентированных элементов боковых площадок трехплощадочного фотоприемника суммы фототоков других четырех элементов этих же боковых площадок, а сигнал рассогласования системы слежения за дорожкой формируют путем вычитания из суммы фототоков четырех элементов одной боковой площадки трехплощадочного фотоприемника суммы фотопотоков четырех элементов другой его боковой площадки. 7 ил.
СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ РАССОГЛАСОВАНИЯ СИСТЕМ АВТОФОКУСИРОВКИ И СЛЕЖЕНИЯ ЗА ДОРОЖКОЙ НА ПОДВИЖНОМ ОПТИЧЕСКОМ НОСИТЕЛЕ ИНФОРМАЦИИ, заключающийся в направлении на носитель лучей трехлучевого лазерного источника излучения, и смещенных друг относительно друга поперек дорожек на четверть шага записи, использовании трехплощадочного фотоприемника, по меньшей мере боковые площадки которого выполнены четырехэлементными и на каждую из площадок которого через фокусирующий объектив и цилиндрическую линзу направлен свой отраженный от подвижного оптического носителя информации луч, отличающийся тем, что, с целью повышения точности и надежности слежения, сигнал рассогласования системы автофокусировки формируют путем вычитания из суммы фототоков диагонально объединенных и одинаково ориентированных элементов боковых площадок трехплощадочного фотоприемника суммы фототоков других четырех диагонально объединенных и одинаково ориентированных элементов этих же боковых площадок фотоприемника, а сигнал рассогласования системы слежения за дорожкой формируют путем вычитания из суммы фототоков четырех элементов одной боковой площадки трехплощадочного фотоприемника суммы фототоков четырех элементов другой его боковой площадки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Оптико-механическое запоминающее устройство | 1990 |
|
SU1753489A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
