XI
XI ч|
VJ
Ю
Изобретение относится к технике записи и/или воспроизведения информации с взаимным относительным перемещением оптического носителя информации и оптической головки и может быть использовано в информационной технике, иапример,-в устройствах цифровой звукозаписи, цифровой видеозаписи, оптических внешних запоминающих устройствах ЭВМ.
Известно адаптивное устройство слежения за информационной дорожкой, которое содержит многоэлементный фотоприемник с двумя выходами Слежение и по меньшей мере одним выходом Воспроизведение и оптико-механический узел слежения за дорожкой, с которым кинематически связан привод слежения, подключенный к выходу узла управления приводом, ко входу которого через цифро- аналоговый преобразователь подключен выход цифрового делителя, соединенного входом через аналого-цифровые преобразователи с двумя разностными усилителями, ко входам первого разностного усилителя подключены выходы Слежение многоэлементного фотоприемника, ко входам второго разностного усилителя подключены аналоговый сумматор, входы которого в свою очередь подключены к выходам Слежение многоэлементного фотоприемника, и усилитель, ко входу которого через фильтр нижних частот подключен выход Воспроизведение многоэлементного фотоприемника.
Недостатком устройства является невысокая надежность слежения, обусловленная тем обстоятельством, что предложенное техническое решение работоспособно лишь в частном случае, когда центры боковых лучей совмещены с краями информационной дорожки, а ширина опорной дорожки примерно равна ширине информационной дорожки. Невысокая надежность слежения обусловлена также влиянием битов записи на информационной дорожке на сигнал рассогласования, поскольку для участвующих в процзссе его формирования сигналов, считываемых с выходов Слежение и Воспроизведение, содержащаяся на информационной дорожке запись служит источником мультипликативных помех.
Наиболее близким по технической сущности и наибольшему количеству совпадающих отличительных признаков является устройство слежения за информационной дорожкой носителя оптической записи, содержащее оптически связанные источник излучения, расщепитель и светоделитель, с вторым оптическим выходом которого сопряжен многоэлементный фотоприемник с
двумя выходами Слежение и по меньшей мере одним выходом Воспроизведение, а также оптико-механический узел слежения за дорожкой, с которым кинематически связан привод слежения, подключенный к выходу узла управления приводом, а к двум входам узла управления приводом два выхода Слежение многоэлементного фотоприемника подключены через
0 последовательно включенные фильтры высоких частот и детекторы огибающей,
Недостатком устройства является невысокая надежность слежения, обусловленная, во-первых, малым диапазоном
5 однозначности сигнала рассогласования, равным, несмотря на предложенный вариант деформации дискриминационной характеристики датчика сигнала рассогласования, всего плюс-минус полови0 не ширины дорожки, и, во-вторых, наличием мультипликативных помех от содержащихся на информационных дорожках битов записи.
Целью изобретения является повыше5 ние надежности слежения за информационной дорожкой.
Поставленная цель достигается тем, что в устройстве слежения за информационной дорожкой оптического носителя информа0 ции, .содержащем,, последовательно установленные источник излучения, расщепитель, светоделитель и оптико-механический узел слежения за дорожкой, а также оптически связанный со светодителем
5 многоэлементный фотоприемный узел, выход Воспроизведение и два выхода Слежение которого соединены со входами датчика сигнала рассогласования, связанного выходом со входом узла управления
0 приводом слежения, который через привод слежения соединен с управляющим входом оптико-механического узла слежения за дорожкой, имеющего подвижный элемент, датчик сигнала рассогласования выполнен в
5 виде последовательно соединенных блока выделения сигнала слежения и блока дифференцирования по отслеживаемой пространственной координате, при этом входами датчика сигнала рассогласования
0 являются входы блока выделения сигнала слежения, а выходом - выход блока дифференцирования по отслеживаемой пространственной координате.
Блок выделения сигнала слежения вы5 полней в виде аналогового сумматора, входы и выход которого являются соответственно входами и выходом блока выделения сигнала слежения.
Также блок выделения сигнала слежения выполнен в виде коммутатора, входы и
выход которого являются соответственно входами и выходом блока выделения сигнала слежения.
Кроме того, узел дифференцирования по отслеживаемой пространственной коор- динате выполнен состоящим из последовательносоединенныхблокадифференцирования по времени и коммутатора аналоговых сигналов, инвертора и последовательно связанных датчика направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой и компаратора, выход которого соединен со входом управления коммутатора аналоговых сигналов, другой сигнальный вход которого связан с выходом блока дифференцирования по времени через инвертор, при этом входом узла диффе- ренцирования по отслеживаемой пространственной координате является вход блока дифференцирования по времени, а выходом - выход коммутатора аналоговых сигналов,
Блок дифференцирования по отслеживаемой пространственной координате вы- полней состоящим из последовательно соединенных пикового детектора и аналогового вычитателя, а также датчика направления, блока перемножения знаков функций и последовательно соединенных инвертора и коммутатора аналоговых сигналов, выход аналогового вычитателя связан со входом инвертора и сигнальным входом коммутатора аналоговых сигналов, другой сигнальный вход которого соединен с выходом блока перемножения знаковых функций, а выход является выходом блока дифференцирования по отслеживаемой пространственной координате, входом которого является вход пикового детектора, связанный также с дру- гим входом аналогового вычитателя и входом блока перемножения знаковых функций, другой вход которого соединен с выходом датчика направления перемещения подвижного элемента оптико-механи- ческого узла слежения за дорожкой, блок перемножения знаковых функций включает в себя компаратор и последовательно связанные блок дифференцирования по времени, другой компаратор и аналоговый перемножитель, с другим входом которого соединен выход компаратора, при этом выход аналогового перемножителя связан с выходом блока перемножения знаковых функций, входом которого является вход блока дифференцирования по времени, а другим входом - вход компаратора.
Датчик направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой выполнен состоящим из двух каналов Спежение и канала Воспроизведение, а также включают в себя шесть логических схем И, две логические схемы ИЛИ и RS-триггер, каналы Слежение включают в себя соответственно первый и третий блоки дифференцирования по времени и логические схемы НЕ, а также первый, четвертый и третий, шестой компараторы, а канал Воспроизведение состоит из второго блока дифференцирования по времени, второй логической схемы НЕ и второго и пятого компараторов, в каждом из каналов выход соответствующего первого, второго и третьего блоков дифференцирования по времени соединен со входом соответственно первого, второго и третьего компараторов, а соответственно со входом четвертого, пятого и шестого компараторов соответственно через первую, вторую и третью логические схемы НЕ, выход первого компаратора подключен к первым входам первой и второй логических схем И, выход второго компаратора - к первым входам третьей и четвертой логических схем И, выход третьего - к первым входам пятой и шестой логических схем И, вторые входы первой и шестой логических схем И связаны с выходом пятого компаратора, вторые входы второй и третьей логических схем И - с выходом шестого компаратора, а выход четвертого компаратора - со вторыми входами четвертой и пятой логических схем И, выходы первой, третьей и пятой логических схем И соединены со входами логической схемы ИЛИ, а выходы второй, четвертой и шестой
-со входами другой логической схемы ИЛИ, выходы логических схем ИЛИ подключены ко входам RS-триггера. выход которого является выходом блока, входами Слежение
-входы первого и третьего блоков дифференцирования по времени, а входом Воспроизведение - вход второго блока дифференцирования по времени.
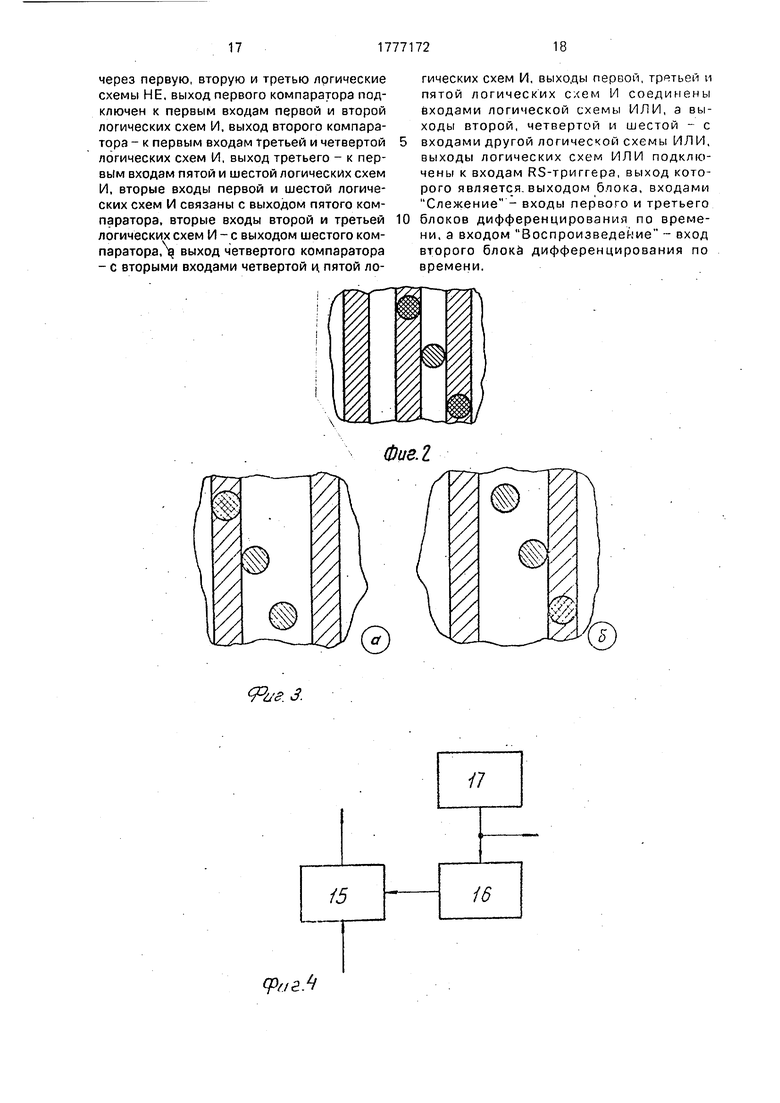
На фиг.1 представлена схема устройства; на фиг.2 - пример структуры дорожек на оптическом носителе информации, отслеживаемых устройством; на фиг.З - другой пример структуры дорожек; на фиг.4 - пример реализации узла дифференцирования по отслеживаемой пространственной координате; на фиг.5 - эпюры к фиг.4; на фиг.6 - другой пример реализации узла дифференцирования по отслеживаемой пространственной координате; на фиг.7 - эпюры к фиг.6; на фиг.8 - третий пример реализации узла дифференцирования по отслеживас- мой пространственной координате; на фиг.9
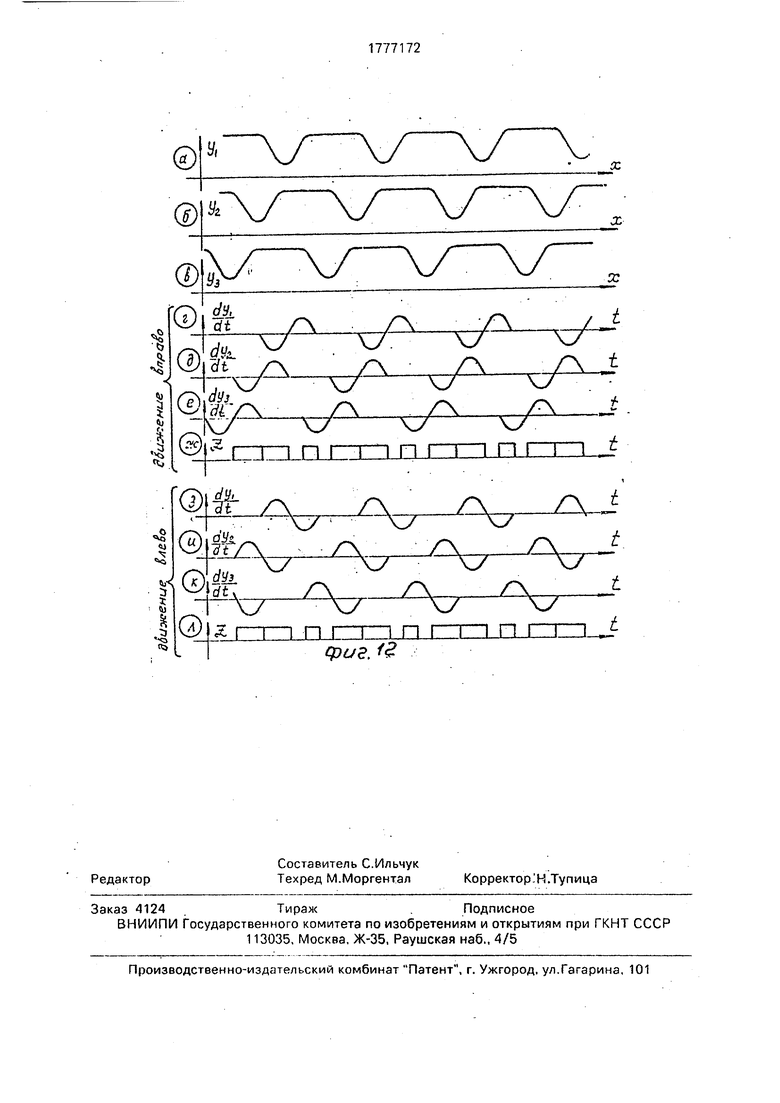
-эпюры к фиг.8; на фиг.10 - пример реализации датчика направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой; на фиг. 11 - другой пример реализации датчика направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой; на фиг. 12 - эпюры к фиг. 10, 11,
Устройство слежения за информационной дорожкой оптического носителя информации, функциональная схема которого приведена на фиг.1, включает в себя оптически связанные источник излучения 1 (например, полупроводниковый лазер), расщепитель 2 (например, дифракционную решетку), светоделитель 3, четвертьволновую пластинку 4, оптико-механический узел слежения за дорожкой 5 (с перемещением подвижного исполнительного оптического элемента относительно вращающегося оптического носителя информации как, например, в пат. США № 4829503 или с перемещением вращающегося оптического носителя информации относительно неподвижной оптической головки как, например, в пат. США № 4811327) и оптический носитель информации 6 (дисковый, цилиндрический, ленточный или иной). С вторым оптическим выходом светоделителя 3 оптически сопряжен многоэлементный фотопри- емник7(трехплощадочный,
шестиплощадочный или иной), имеющей первый 8 и второй .9 выходы Слежение и по меньшей мере один выход Воспроизведение 10 (в шестиплощадочном фотоприемнике их четыре, в трехплощадочном - один). Первый 8 и второй 9 выходы Слежение подключены соответственно к первому и второму входам блока выделения сигнала слежения 11 (содержащего аналоговый коммутатор либо аналоговый сумматор и, возможно, другие узлы), имеющий третий вход, на который подается адресная информация. К выходу блока выделения сигнала слежения 11 через последовательно включенные узел дифференцирования по отслеживаемой пространственной координате 12 (примеры реализации которого приведены на фиг.4, 6. 8), узел управления приводом 13 (ПИД, ПД, с переменной структурой или иной известной в теории автоматического регулирования реализации) и привод слежения 14 (магнитоэлектрический, электромагнитный или иной) подключен вход оптико-механического узла слежения за дорожкой 5. Второй выход блока выделения сигнала слежения 11 подключен к второму входу узла 13 управления приводом.
Узел дифференцирования по отслеживаемой пространственной координате 12, приведенной на фиг.4, включает в себя синхронный детектор 15, к второму входу которого через фазовращатель 16 подключен генератор колебаний 17.
Другой пример реализации узла дифференцирования по отслеживаемой пространственной координате 14, приведен на фиг.б и включает в себя последовательно включенные узел дифференцирования по времени 18 и коммутатор аналоговых сигналов 19. К второму сигнальному входу коммутатора
0 аналоговых сигналов 19 узел дифференцирования по времени 18 подключен через инвертор 20. К управляющему входу коммутатора аналоговых сигналов 19 последовательно подключены датчик 21 направления
5 перемещения (магнитоэлектрический, емкостной, оптико-электронный или иной) подвижного элемента оптико-механического узла слежения за дорожкой 5 и компаратор 22,
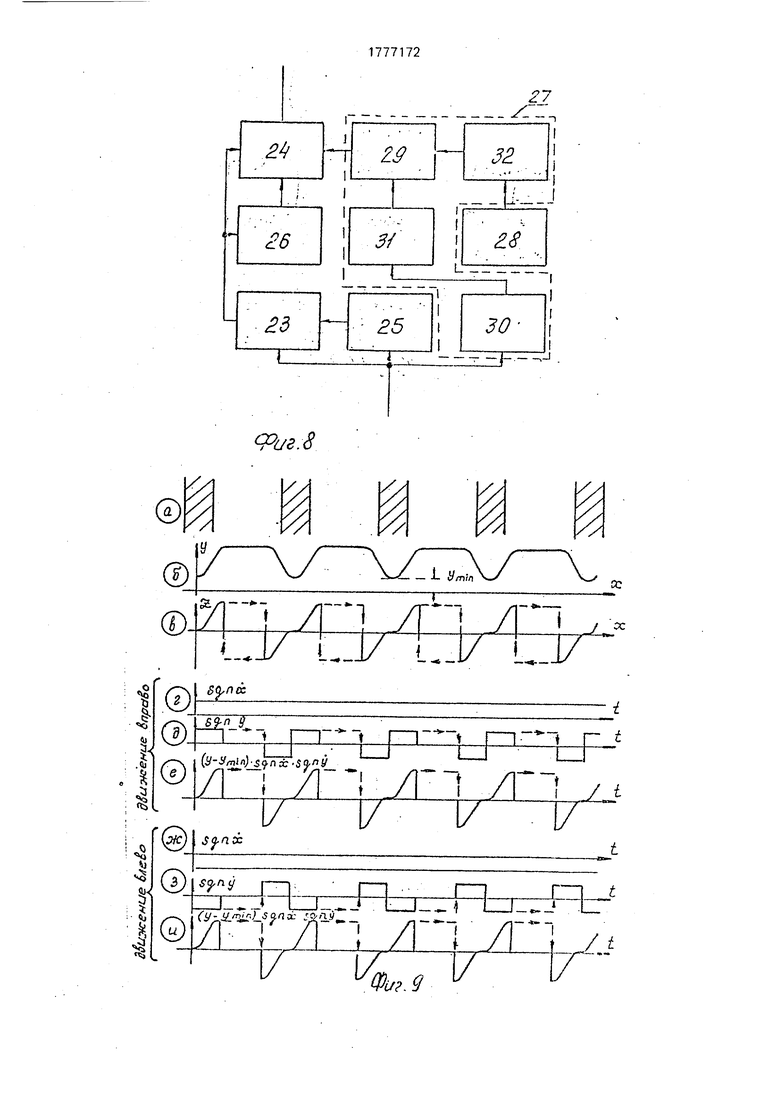
0 Третий пример реализации узла дифференцирования по отслеживаемой пространственной координате 14, приведен на фиг.8 и включает в себя последовательно включенные аналоговый вычитатель 23 и комму5 татор аналоговых сигналов 24. К второму входу аналогового вычитателя 23 вход узла дифференцирования по отслеживаемой пространственной координате 14 подключен через пиковый детектор 25. К второму
0 сигнальному входу коммутатора аналоговых сигналов 24 через инвертор 26 подключен выход аналогового вычитателя 23. К управляющему входу коммутатора аналоговых сигналов 24 через узел перемножения зна5 ковых функций 27 подключен выход датчика 28 направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой 5. Узел перемножения знаковых функций 27 может быть выполнен #
0 виде аналогового перемножителя 29, к оди ному входу которого последовательно под ключены узел дифференцирования nd времени 30, ко входу которого в свою очередь подключен выход датчика 28 направле5 ния перемещения подвижного элемента оптико-механического узла слежения за дорожкой 5.
Датчик 21, 28 направления перемещения подвижного элемента оптико-механиче0 ского узла 5 слежения за дорожкой, приведен на фиг.10 и включает в себя первый 33, второй 34 и третий 35 узлы дифференцирования по времени, к которым соответственно подключены первый выход
5 Слежение 8, выход Воспроизведение 10 и второй выход Слежение 9 многоэлементного фотоприемника 7. К выходам первого 33, второго 34 и третьего 35 узлов дифференцирования по времени подключены первый 36, второй 37 и третий 38 компарзторм
(выполненные, например, на базе операционных усилителей и формирующие биполярные выходные сигналы). Выход первого компаратора 36 подключен к первым входам первого 39 и второго 40 аналоговых перемножителей непосредственно, а к вторым входам четвертого 41 и пятого 42 аналоговых перемножителей - через первый аналоговый инвертор 43. Выход второго компаратора 37 подключен к первым входам третьего 44 и четвертого 41 аналоговых перемножителей непосредственно, а к вторым входам первого 36 и шестого 45 аналоговых перемножителей - через второй аналоговый инвертор 46. Выход третьего компаратора 38 подключен к первым входам пятого 42 и шестого 46 аналоговых перемножителей непосредственно, а к вторым входам второго 40 и третьего 44 аналоговых перемножителей - через третий аналоговый инвертор 47. Выходы первого 39, третьего 44 и пятого 42 аналоговых перемножителей подключены соответственно к первому, второму и третьему входам первого аналогового сумматора 48. Выходы второго 40, четвертого 41 и шестого 45 аналоговых перемножителей подключены соответственно к первому, второму и третьему входам второго аналогового сумматора 49. Выходы первого 48 и второго 49 аналоговых сумматоров подключены ко входу четвертого компаратора 50 (выполненного аналогично первому 36, второму 37 и третьему 38 компараторам).
Другой пример реализации датчика 21, 28 направления перемещения подвижного элемента оптико-механического узла 5 слежения за дорожкой, приведен на фиг.10. Он включает в себя первый 51, второй 52 и третий 53 узлы дифференцирования по времени, ко входам которых соответственно подключены первый выход Слежение 8, выход Воспроизведение 10 и второй выход Слежение 9 многоэлементного фотоприемника 7. Выходы первого 51, второго 52 и третьего 53 узлов дифференцирования по времени соответственно подключены к входам первого 54, второго 55 и третьего 56 компараторов (униполярного выходного сигнала) непосредственно, а к входам четвертого 57, пятого 58 и шестого 59 компараторов (униполярного выходного сигнала) через первую 60, вторую 61 и третью 62 логические схемы НЕ. К входам первой логической схемы И 63 подключены выходы первого 54 и четвертого 58 компараторов, К входам второй логической схемы И 64 подключены выходы первого 54 и шестого 59 компараторов. К входам третьей логической схемы И 65 подключены выходы
третьего 55 и шестого 59 компараторов. К входам четвертой логической схемы И 66 подключены выходы второго 57 и третьего 55 компараторов. К входам пятой логиче- 5 ской схемы И 67 подключены выходы второго 57 и пятого 56 компараторов. К входам шестой логической схемы И 68 подключены выходы четвертого 58 и пятого 56 компараторов. Выходы первой 63, третьей 65 и
10 пятой 67 логических схем И, подключены к трем входам первой логической схемы ИЛИ 69.Выходы второй 64, четвертой 66 и шестой 68 логических схем И подключены к трем входам второй логической схемы
15 ИЛИ 70. Выходы первой 69 и второй 70 логических схем ИЛИ подключены к двум входам RS-триггера 71.
Устройство слежения за информационной дорожкой оптического носителя инфор0 мации (см. фиг.1) работает следующим образом. При записи или воспроизведении информации оптический носитель информации 6 (для определенности изображен цилиндрический оптический носитель
5 информации) вращается (привод вращения не показан). Поэтому имеют место осевые биения информационных дорожек (возможные варианты структуры информационных и опорных дорожек изображены на фиг.2 и 3)
0 на оптическом носителе 6 относительно падающих на него трех лучей, сдвинутых друг относительно друга поперек дорожек на ширину информационной дорожки. Т.е. когда центральный луч находится на информаци- -3
5 он ной дорожке, по меньшей мере один из боковых лучей будет находиться на опорной дорожке, и поскольку опорная дорожка является сплошной, соответствуйте боковой отраженный луч битами записи на
0 соседних информационных дорожках будет модулирован по интенсивности в минимальной степени. Отраженные от оптического носителя информации 6 лучи, возвращаясь назад по тому же пути, что и падающие лучи,
5 проходят через оптико-механический узел 5 слежения за дорожкой, четвертьволновую пластину 4 и поляризационным светоделителем 3, на оптический вход которого поступает излучение лазера 1, о расщепителе 2
0 преобразованное в три параллельных пучка лучей, отражаются на фотоприемник 7 (по меньшей мере трехплощадочный). Снимаемые с первого 8 и второго 9 выходов Слежение электрические сигналы поступают
5 на первый и второй сходы блока выделения сигнала слежения 11, в котором для структуры дорожек, изображенной на фиг.2, они суммируются, а для структуры дорожек, изображенной на фиг.З, обеспечивается коммутация одного из них. Возможны и иные
алгоритмы обработки информации, поступающей с фотоприемника 7 в зависимости от используемой структуры дорожек. Кроме того,на третий вход блока выделения сигнала слежения поступает информация об адресе отслеживаемой дорожки, которая используется в режиме перехода с дорожки на дорожку. Эта адресная информация с второго выхода блока выделения сигнала слежения 11 подается на второй вход узла управления приводом 13, а с первого выхода на вход узла 12 дифференцирования по отслеживаемой пространственной координате подается сигнал, используемый в режиме слежения за дорожкой. При помощи узла 12 обеспечивается слежение за серединой соседней опорной (или соседних опор- ных) дорожки, т.е. реализуется эффективный экстремальный регулятор, Сигнал с выхода узла 12 дифференцирования по отслеживаемой пространственной координате через узел управления приводом 13 поступает на привод слежения 14, кинематически связанный с подвижным элементом (цилиндрическим оптическим носителем информации при использовании иммерсионной оптики или оптического дефлектора при использовании сухой оптики) оптико-механического узла 5 слежения за дорожкой, в котором, в конечном счете, и отрабатывается сигнал рассогласования. Дополнительным достоинством устройства является расширение примерно вдвое интервала монотонности дискриминационной характеристики узлов формирования сигнала рассогласования, поступающего на вход узла управления приводом 13 (см. фиг.9).
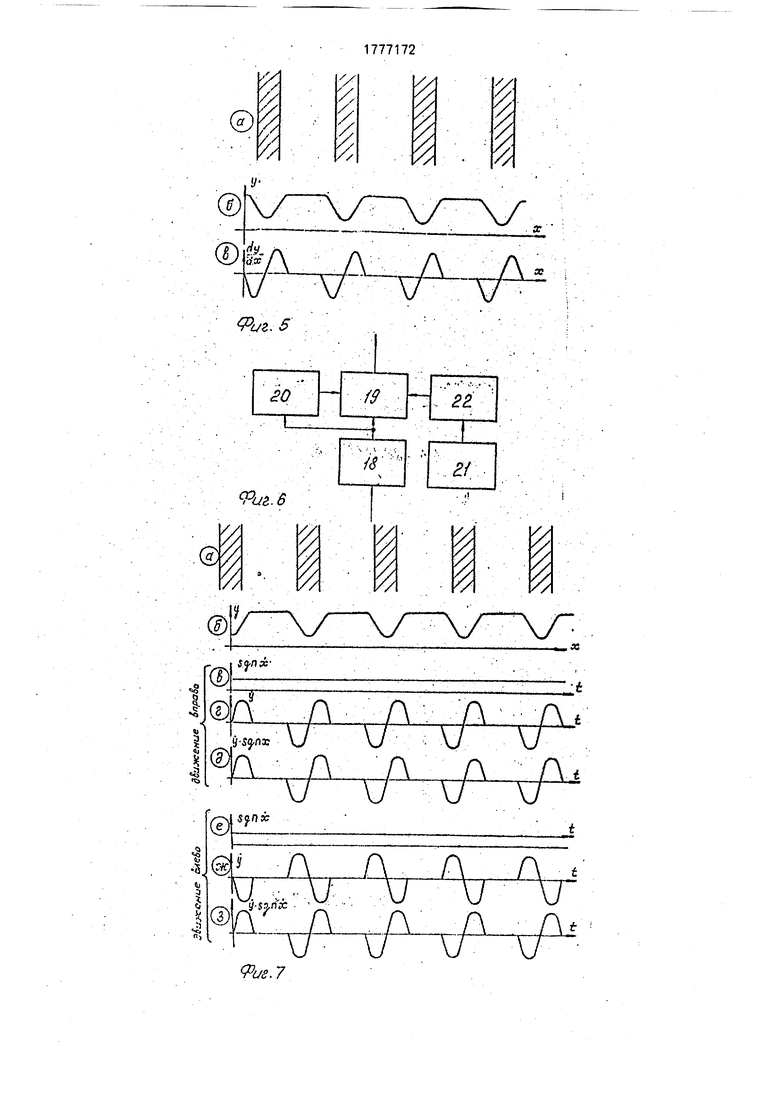
Изображенная нафиг.4 простейшая реализация узла 12 дифференцирования по отслеживаемой пространственной координате работает следующим образом. При подаче на привод слежения 14 синусоидальных колебаний с выхода генератора колебаний 17 (на фиг.1 эта функцио- нальная связь, не нужная при использовании других реализаций узла 12 дифференцирования по отслеживаемой пространственной координате, для простоты не показана) на вход синхронного детектора 15 с выхода аналогового процессора поступает сигнал (см. фиг.5а,б).
Yex Y0(1-mcos Л
X - Х0 +Xm sin wt
- Y (1 - m cos ( я Х /° ) +
+
где Yo - средняя составляющая;
m - индекс модуляции;
Л 3,14159...;
Х0 - координата отслеживаемой дорожки;X - координата центра луча;
Хт - амплитуда сканирования луча поперек дорожки (Xm « d);
2d - шаг дорожек.
В синхронном детекторе 15 этот сигнал сначала умножается на опорные колебания.
15
УСд YBX sin wt Yi + Y2 + Уз; Yi
-H-.jr- sin (
Y2 Yo (1 - m cos ( Л
X Xm
-д-Я)) sin wt;
УЗУС -m
X
X - Хоч
T -n-tf sin ( я)созт;
где Yi - низкочастотная компонента;
Y2 - первая гармоника частоты опорных колебаний;
YS - вторая гармоника частоты опорных колебаний.
Затем при помощи входящего в состав синхронного детектора фильтра нижних ча- стот (на чертеже не показанного) из этой суммы выделяется низкочастотная компонента. Поэтому выходной сигнал равен (см. фиг.бв)
г ВЫХ,
Yo m
.Х2 я-fr- sin( n d
40
Как видно в режиме слежения за дорожкой, когда (X - Xm) « d, получаем:
Yo -m
л
Xm Xi
т . лщ
П
X Хо
т.е. имеет место линейная зависимость сиг- нала на выходе узла дифференцирования по отслеживаемой пространственной координате от величины первичного сигнала рассогласования X - Х0.
Узел дифференцирования по отслежи- ваемой пространственной координате 12, функциональная схема которого изображена на фиг.6, работает следующим образом. В узле дифференцирования по времени 18 формируется сигнал, пропорциональный производной по времени (фиг.7г, ж) исходного сигнала (фиг.7а, б), поступающего с выхода блока выделения сигнала слежения 11. Этот сигнал в коммутаторе аналоговых сигналов 19, на два входа которого сигнал с
выхода узла дифференцирования по времени 18 поступает инвертированным и неинвертированным, умножается на знаковую функцию скорости движения луча поперек дорожки, которая формируется последовательно подключенными к управляющему входу коммутатора аналоговых сигналов 19 узлами 21 и 22. Т.е. на выходе данной реализации узла 12 дифференцирования по отслеживаемойпространственнойкоординате формируется в конечном счете сигнал (фиг.7д, з):
d Y dt
вх
sin
d(X-Xo) dt
с удовлетворительной точностью аппроксимирующей первичный сигнал рассогласования X - Х0.
Узел дифференцирования по отслеживаемой пространственной координате 12, функциональная схема которого изображена на фиг.8, работает следующим образом. В аналоговом вычитателе 23 формируется разность текущего значения входного сигнала (фиг.Эа, б), поступающего с выхода блока выделения сигнала слежения 11, и его минимального значения, определяемого пиковым детектором 25. На.два сигнальных входа коммутатора аналоговых сигналов 24 этот сигнал поступает непосредственно и предварительно проинпертированным в инверторе 26. На управляющий вход коммутатора аналоговых сигналов 24 при этом с выхода узла 27 перемножения знаковых функций поступает сигнал, соответствующий произведению знаковых функций производной входного сигнала (фиг.Эд, з), которая формируется узлами 30, 31. и производной координаты луча (фиг.Эг. ж), которая формируется узлами 28, 32. Т.е. на выходе в конечном счете формируется сигнал (фиг.Эе, и),
YBb.xMYex.-YnV.rOsIn -ffi Slnd()
с удовлетворительной точностью аппроксимирующий первичный сигнал рассогласования, Положительной особенностью данного варианта реализации узла дифференцирования по отслеживаемой пространственной координате 12 является по меньшей мере вдвое больший диапазон монотонной зависимости Увых. f (X - Хо), который на фиг.Эе при малой величине гистерезиса в компараторе 31 изображен сплошной линией, а при
большой величине гистерезиса - продолжен штриховой линией.
Датчик 21, 28 направления перемещения подвижного элемента оптико-механиче5 ского узла 5 слежения за дорожкой, функциональная схема которого изображена на фиг.10, работает следующим образом. В первом 33, втором 34 и третьем 35 узлах дифференцирования из входных сигналов
10 (фиг.11а, б, в)формируются их производные по времени (фиг. 11 в, д, е, з, и, к). А в первом
39,третьем 44 и пятом 42 аналоговых умножителях перемножаются сигналы, произведение которых положительно только при
15 одном направлении перемещения луча относительно дорожек (фиг.12ж). Во втором
40,четвертом 41 и шестом 45 аналоговых умножителях перемножаются сигналы, произведение которых положительно только
0 при противоположном направлении луча относительно дорожек (фиг. 12л). Сигналы с выходов первого 39, третьего 44 и пятого 42 аналоговых умножителей объединяются в первом аналоговом сумматоре и поступают
5 на первый вход компаратора 50 (вместо которого может быть в некоторых случаях включен RS-триггер). Сигналы с выходов второго 40, четвертого 41 и шестого 45 аналоговых перемножителей объединяются
0 вторым аналоговым сумматором 49 и передаются на второй вход компаратора 50.
Датчик 21, 28 направления перемещения подвижного элемента оптико-механиче- ского узла 5 слежения за дорожкой,
5 функциональная схема которого приведена на фиг.11, работает следующим образом, В первом 51, втором 52 и третьем 53 узлах дифференцирования формируются производные по времени (фиг.12г, д, е, з, и, к)
0 входных сигналов (фиг.12а, б, в), которые в первом 60, втором 61 и третьем 62 инверторах инвертируются. В компараторах 54, 55, 56, 57, 58, 59 формируются импульсы, соответствующие положительным значениям
5 входных сигналов. И при помощи первой 63, второй 65 и третьей 67 логических схем И формируются сигналы, соответствующие одному направлению перемещения луча относительно дорожек, которые в первой ло0 гической схеме ИЛИ 69 объединяются (фиг.12ж). При помощи второй 64, четвертой 66 и шестой 68 логических схем И формируются импульсы, соответствующие противоположному направлению перемещения
5 луча относительно дорожек, которые объединяются второй логической схемой ИЛИ 70. Импульсы с выходов первой 69 и второй 70 логических схем ИЛИ подаются на входы RS-триггера (или компаратора), в котором и формируется выходной сигнал.
Формула изобретения
1.Устройство слежения за информационной дорожкой оптического носителя информации, содержащее последовательно установленные источник излучения, расщепитель, светоделитель и оптико-механический -узел слежения за дорожкой, а также оптически связанный со светоделителем многоэлементный фотоприемный узел, выход Воспроизведение и два выхода Слежение которого соединены с входами датчика сигнала рассогласования, связанного выходом с входом узла управления приводом слежения, который через привод слежения соединен с управляющим входом оптико-механического узла слежения за дорожкой, имеющего подвижный элемент, о т- личающееся тем, что, с целью повышения надежности слежения за информацион- ной дорожкой, датчик сигнала рассогласования выполнен в виде последовательно соединенных блока выделения сигнала слежения и блока дифференцирования по отслеживаемой пространственной координате, при этом входами датчика сигнала рассогласования являются входы блока выделения сигнала слежения, а выходом - выход блока дифференцирования по отслеживаемой пространственной координате.
2.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок выделения сигнала слежения выполнен в виде аналогового сумматора, входы и выход которого являются соответственно входами и выходом блока выделения сигнала слежения.
3.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок выделения сигнала слежения выполнен в виде коммутатора, входы и выход которого являются соответственно входами и выходом блока выделения сигнала слежения.
4.Устройство по пп.1-3, отличающееся тем, что узел дифференцирования по отслеживаемой пространственной координате выполнен состоящим из последовательносоединенныхблокадифференцирования по времени и коммутатора аналоговых сигналов, инвертора и последовательно связанных датчика направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой и компаратора, выход которого соединен с входом управления коммутатора аналоговых сигналов, другой сигнальный вход которого связан с выходом блока дифференцирования по времени через инвертор, при этом входом узла дифференцирования по отслеживаемой пространственной координате является вход блока дифференцирования по времени, а выходом - выход коммутатора аналоговых сиг-налов.
5. Устройство по пп.1-3, отличающееся тем, что блок дифференцирования по отслеживаемой пространственной координате выполнен состоящим из последовательно соединенных пикового детектора и
0 аналогового вычитателя, а также датчика направления, блока перемножения знаковых функций и последовательно соединенных инвертора и коммутатора аналоговых сигналов, выход аналогового вычитателя связан с
5 входом инвертора и сигнальным входом коммутатора аналоговых сигналов, другой сигнальный вход которого соединен с выходом блока перемножения знаковых функций, а выход является выходом блока
0 дифференцирования по отслеживаемой пространственной координате, входом которого является вход пикового детектора, связанный также с другим входом аналогового вычитателя и входом блока перемноже5 ния знаковых функций, другой вход которого соединен с выходом датчика направления перемещения подвижного элемента оптико-механического узла слежения за дорожкой, блок перемножения знаковых
0 функций включает в себя компаратор и последовательно связанные блок дифференцирования по времени, другой компаратор и аналоговый перемножитель, с другим входом которого соединен выход компаратора,
5 при этом выход аналогового перемножителя связан с выходом блока перемножения знаковых функций, входом которого является вход блока дифференцирования по времени, а другим входом - вход компаратора.
0 6. Устройство по пп.1, 3-5, отличающееся тем, что датчик направления перемещения подвижного элемента оптико- механического узла слежения за дорожкой выполнен состоящим из двух каналов Сле5 жение и канала Воспроизведение, а также включает в себя шесть логических схем И, две логические схемы ИЛИ и RS-триггер, каналы Слежение включают в себя соответственно первый и третий блоки диффе0 ренцирования по времени и логические схемы НЕ, а также первый, четвертый и третий, шестой компараторы, а канал Воспроизведение состоит из второго блока дифференцирования по времени, второй ло5 гической схемы НЕ и второго и пятого компараторов, в каждом из каналов выход соответствующего первого, второго и третьего блоков дифференцирования по времени соединен с входом соответственно первого, второго и третьего компараторов, а соответчерез первую, вторую и третью логические схемы НЕ. выход первого компаратора подключен к первым входам первой и второй логических схем И, выход второго компаратора - к первым входам третьей и четвертой логических схем И, выход третьего - к первым входам пятой и шестой логических схем И, вторые входы первой и шестой логических схем И связаны с выходом пятого компаратора, вторые входы второй и третьей логических схем И - с выходом шестого ком- паратора, выход четвертого компаратора - с вторыми входами четвертой ц пятой ло0
гических схем И, выходы первой, трртьей и пятой логических схем И соединены входами логической схемы ИЛИ, а выходы второй, четвертой и шестой - с входами другой логической схемы ИЛИ, выходы логических схем ИЛИ подключены к входам RS-триггера, выход которого является, выходом блока, входами Слежение - входы первого и третьего блоков дифференцирования по времени, а входом Воспроизведение вход второго блока дифференцирования по времени.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство слежения за информационной дорожкой носителя оптической записи | 1988 |
|
SU1638724A1 |
| Устройство для записи и/или воспроизведения с информационных дорожек подвижного носителя | 1990 |
|
SU1800479A1 |
| Оптико-механическое запоминающее устройство | 1990 |
|
SU1753489A1 |
| Малогабаритная зенитная управляемая ракета | 2018 |
|
RU2694932C1 |
| Устройство слежения за информационной дорожкой носителя оптической записи | 1988 |
|
SU1638725A1 |
| Устройство оптической записи и воспроизведения информации | 1988 |
|
SU1571665A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| Устройство для ввода графической информации | 1978 |
|
SU742982A1 |
| Устройство для контроля дефектов и профилей поверхности изделий | 1987 |
|
SU1582094A1 |

Изобретение касается записи и воспроизведения информации с использованием оптических средств и может быть использовано в информационной технике. Для повышения надежности слежения за информационной дорожкой сигналы с многоэлементного фотоприемного блока 7 преобразуются блоком 11 выделения сигналов слежения к виду, удобному для их обработки в блоке 12 дифференцирования по отслеживаемой пространственной координате. Сигналы с выхода блока 12 дифференцирования управляют узлом управления 13 привода 14 оптико-механического узла 5 слежения за дорожкой, что позволяет уменьшить мультипликативные помехи от содержащихся на информационных дорожках тестов записи и расширить диапазон монотонности дискриминационной характеристики датчика сигнала рассогласования. 6 з.п. ф-лы, 12 ил.
/1
V
Рие.З.
Фиг4
Фиг. г
©
XV
I
I
Фиг. 5
I
1
A
J
ft
V7
I.
Я
D
а ,ль
л.7
Й
-лт
i
I
i
т/1
т/4/Ч/
&je.8
i
.0)
§
J
r
8
4( «
(ж) I sy.nx
syny
С
2qi i/q/n/. i/,. i/
С
Фиг. /О
Фиг //
21 v il. У I7T
®
У
L H
X7
T7 /Л
ZX
T7 /4
/X
X7 /
./л
(W 7WW
( I.I 1П1 11П1 1П1 1 I
I
111 # х
v7
Ur-r-i n
1I
pi/г.
T7 /4
/X
X7 /
./л t
WW
1I П I I I П III J
| Адаптивное устройство слежения за информационной дорожкой | 1987 |
|
SU1432599A2 |
| кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство слежения за информационной дорожкой носителя оптической записи | 1986 |
|
SU1455360A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
