Изобретение относится к машиностроению, а именно к грузозахватным устройствам, и предназначено для захвата, удержания и транспортировки штучных грузов, в том числе грузов со сложной геометрической конфигурацией поверхности.
Известен вакуумный захват, содержащий вакуум-присосную камеру, соединяемую с источником вакуума и образованную эластичным элементом и корпусом с размещенным в нем подвижным поршнем, шток которого соединен с центральной частью эластичного элемента вакуум-присосной камеры.
Цель изобретения достигается тем, что в вакуумном захвате, содержащем вакуум-присосную камеру, соединяемую с источником вакуума и образованную эластичным элементом и корпусом с размещенным в нем подвижным поршнем, шток которого соединен с центральной частью эластичного элемента вакуум-присосной камеры. Шток выполнен полым с подводящими каналами. Эластичный элемент вакуум-присосной камеры выполнен в виде сферической мембраны с выполненными на ее наружной поверхности полостями высокого разряжения, соединенными через подпружиненные запорные элементы с подводящими каналами полого штока для соединения с источником высокого вакуума или с атмосферой. Вакуум-присосная камера выполнена с возможностью соединения с источником сжатого воздуха.
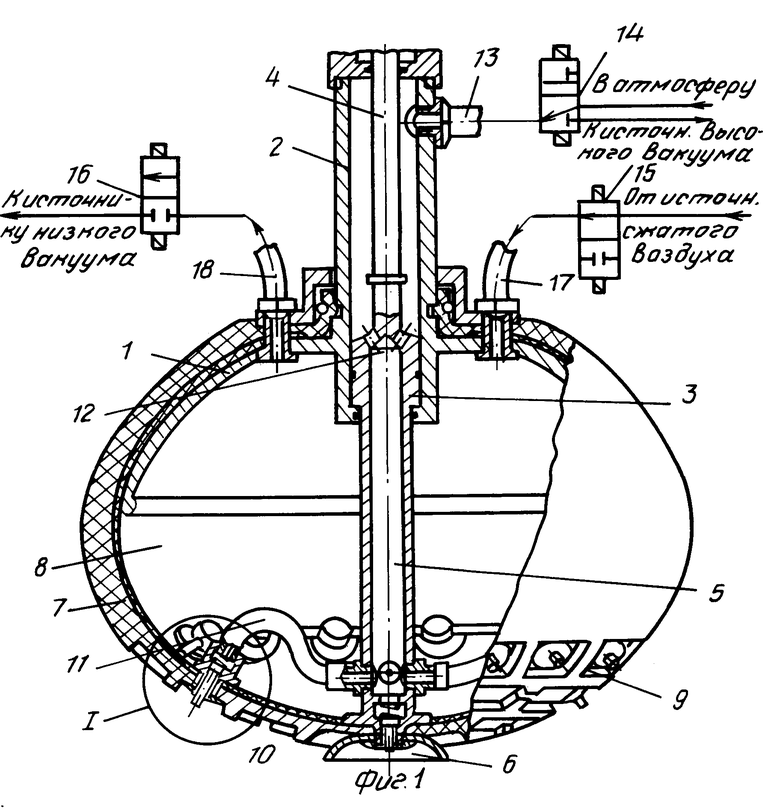
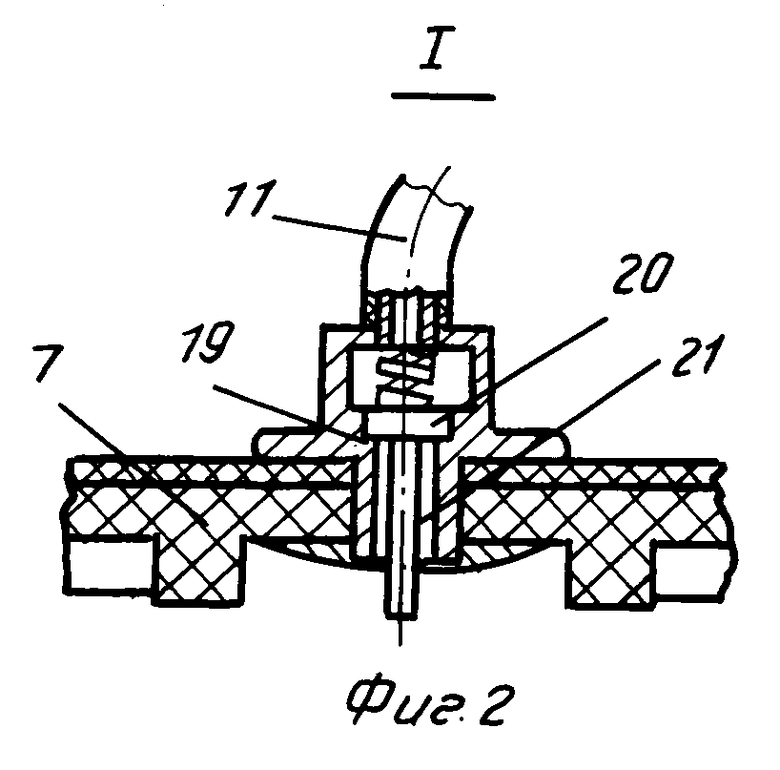
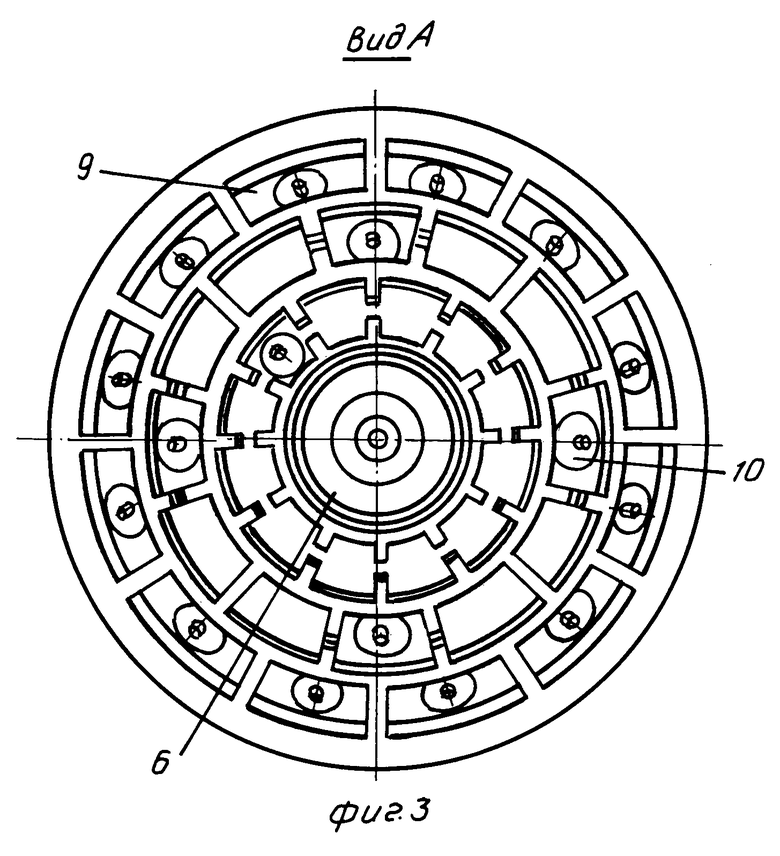
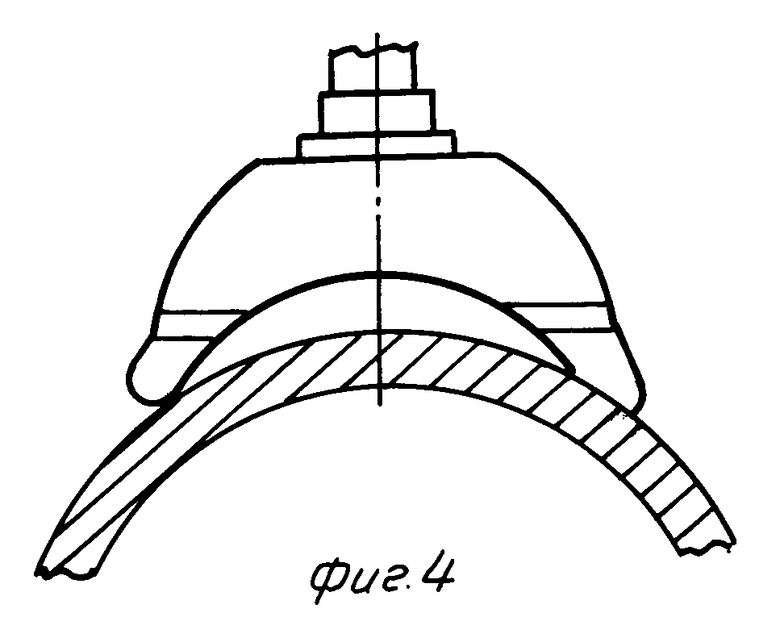
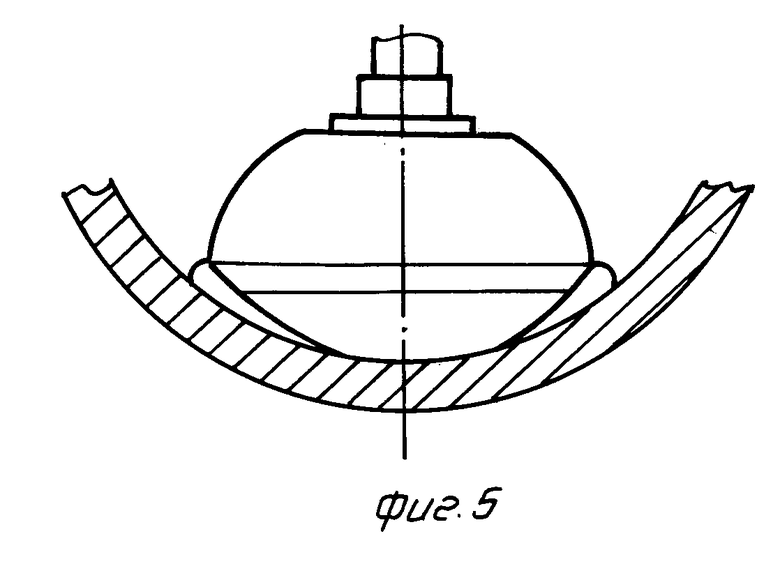
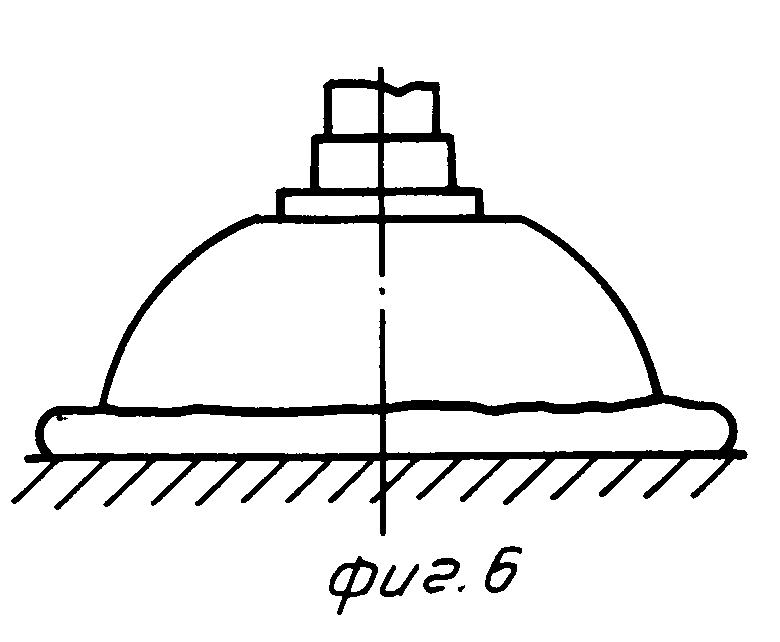
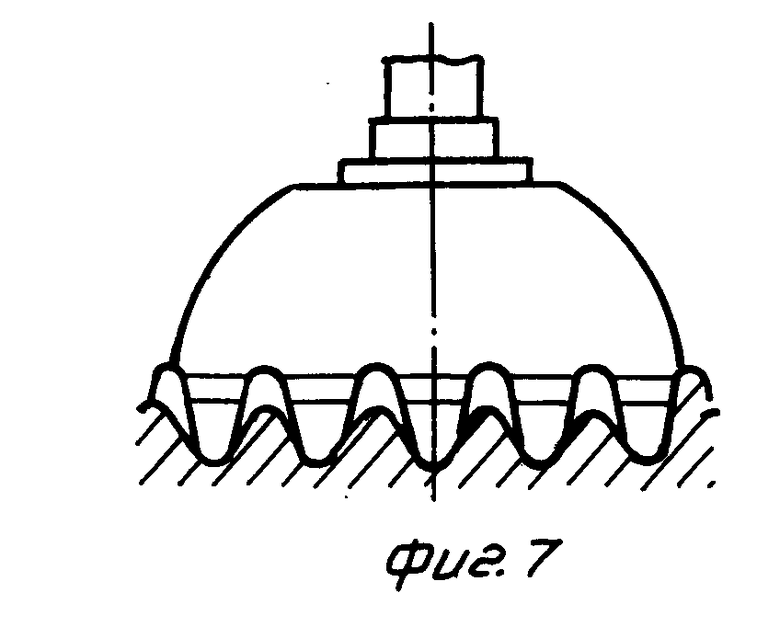
На фиг. 1 изображен вакуумный захват, разрез; на фиг.2 узел I на фиг.1; на фиг.3 вид А на фиг.1; на фиг.4 варианты базирования захвата на поверхностях различных геометрических конфигураций.
Вакуумный захват состоит из корпуса 1, по цилиндрическому каналу 2 которого может свободно перемещаться поршень 3 с фиксирующим штоком 4 и полым штоком 5. Свободный конец полого штока 5 жестко связан с центральной вакуумной присоской 6 эластичной сферической мембраны 7, образующей с корпусом 1 вакуум-присосную камеру 8. На внешней стороне мембраны 7 выполнены несколько рядов вакуумных полостей 9, занимающих суммарную площадь, не превышающую площадь проекции диаметра корпуса захвата на сферическую поверхность мембраны. С целью наиболее эффективного прилегания мембраны к поверхности базирования, все вакуумные полости 9 внутреннего ряда соединены между собой дренажными каналами, а полости среднего ряда разделены на несколько секторов одновременного срабатывания, в то время как полости наружного ряда отделены друг от друга. Посредством подпружиненных запорных элементов 10, установленных на внутренней поверхности эластичной мембраны 7, через систему воздуховодов 11, вакуумные полости 9 и полость присоски 6 соединяются с полостью штока 5, которая через выполненные в поршне отверстия 12, воздуховод 13 и управляющий клапан 14 имеет возможность подсоединения либо к источнику высокого вакуума (не показан), либо в атмосферу. Полость штока 5, вакуумные полости 9 и полость присоски 6 герметично отделены от вакуум-присосной камеры 8, которая посредством управляющих клапанов 15 и 16 через воздуховоды 17 и 18 может быть соответственно подсоединена либо к источнику сжатого воздуха, либо к источнику низкого вакуума (не показаны).
Конструкция установленных в полостях 9 подпружиненных запорных элементов 10 включает полый корпус 19, внутри которого помещен подпружиненный палец 20, который в нормальном положении перекрывает своей головкой воздуховодный канал 21. Длина пальца 20 выбирается таким образом, чтобы длина его выступающий над уровнем перегородок полости 9 части была на 1/4 больше высоты головки пальца. Воздуховоды 11 соединяют каждый запорный элемент 10 либо с полостью штока 5, либо с другими элементами.
Вакуумный захват работает следующим образом.
Перед установкой захвата на поверхности базирования, управляющий клапан 14 соединяет полость цилиндрического канала с атмосферой, клапан 16 закрыт, а клапан 15 соединяет вакуум-присосную камеру 8 с источником сжатого воздуха, давление которого не должно превышать 1,1 атм. Таким образом, вакуум-присосная камера 8 заполняется сжатым воздухом, эластичная мембрана 7 приобретает сферическую форму, а поршень 3 перемещается в свое нижнее положение. После этого захват опускают на поверхность транспортируемого объекта. Одновременно с контактом мембраны 7 с поверхностью базирования, клапан 14 переключают в положение, соединяющее полость цилиндрического канала 2 с источником высокого вакуума, в результате чего происходит вакуумирование полости штока 5. Как правило, начальный контакт с поверхностью объекта осуществляется центральной частью сферической мембраны, поэтому располагаемые в этой части запорные элементы 10 срабатывают ранее других, обеспечивая автоматическое вакуумирование присоски 6 и вакуумных полостей 9 внутреннего ряда, находящихся в непосредственном контакте с поверхностью базирования.
Процесс срабатывания запорных элементов 10 заключается в том, что под действием установочного усилия, приложенного к захвату, палец 20 запорного элемента, находящегося в контакте с поверхностью объекта, преодолевая сопротивление подпирающей его пружины, утапливается в корпус 19, освобождая при этом воздуховодный канал 21. Воздух из полости 9 через воздуховодный канал 21, по системе воздуховодов 11 удаляется в полость штока 5, а область мембраны 7, ограниченная рассматриваемой полостью 9, прижимается к поверхности базирования.
Под действием установочного усилия происходит дальнейшая деформация эластичной мембраны 7, и более удаленные от середины сферической поверхности вакуумные полости 9 входят в контакт с поверхностью захватываемого изделия. За счет сопротивления сжатого воздуха, заключенного в вакуум-присосной камеры 8, наружная поверхность мембраны 7 плотно охватывает транспортируемый объект и, в результате автоматического вакуумирования полостей 9 надежно прижимается к его поверхности.
По мере установления захвата на поверхности, поршень 3 перемещается вверх до соприкосновения корпуса 1 с транспортируемым изделием, после чего фиксирующий шток 4 жестко зажимается в такой позиции механизмом фиксации штока (не показан). Затем управляющий клапан 15 закрывают, а управляющий клапан 16 устанавливают в положение "открыто". Заключенный в вакуум присосной камере 8 сжатый воздух откачивается источником низкого вакуума, а корпус 1 прижимается к поверхности базирования захвата. Обеспечиваемые работой источников высокого и низкого вакуума перепады давлений между атмосферой и вакуум-присосной камерой 8, а также между вакуум-присосной камерой и вакуумными полостями 9 удерживают захват на поверхности объекта таким образом, что основная часть нагрузки от веса транспортируемого изделия воспринимается частью эластичной мембраны 7, ограниченной внутренним диаметром корпуса 1, а сама эта часть мембраны плотно охватывает геометрический профиль поверхности объекта.
По окончании операции транспортирования, переключением клапанов 14, 15 и 16 вакуумные полости 9 соединяют с атмосферой, а вакуум-присосную камеру 8 с источником сжатого воздуха, в результате чего вакуумный захват отжимается от поверхности базирования, а полости 9 и вакуум-присосная камера 8 возвращаются к своему начальному состоянию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2035376C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1992 |
|
RU2050255C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНЫМ ПОВЕРХНОСТЯМ ТРУБОПРОВОДОВ | 1991 |
|
RU2023619C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНЫМ ПОВЕРХНОСТЯМ | 1992 |
|
RU2051058C1 |
| УСТРОЙСТВО ДЛЯ ЗАЧИСТКИ СВАРНЫХ ШВОВ | 1994 |
|
RU2115518C1 |
| УЛЬТРАЗВУКОВОЙ НАКЛОНОМЕР | 1994 |
|
RU2084823C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 1993 |
|
RU2047089C1 |
| УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬ ЗАЗОРОВ В МНОГОСЛОЙНЫХ КОНСТРУКЦИЯХ | 1993 |
|
RU2084821C1 |
| УЛЬТРАЗВУКОВОЙ ДАТЧИК НАКЛОНА | 1993 |
|
RU2062997C1 |
Использование: для захвата, удержания и транспортировки штучных грузов, в том числе грузов со сложной геометрической конфигурацией поверхности. Сущность изобретения: вакуумный захват содержит вакуум-присосную камеру, образованную эластичным элементом, выполненным в виде сферической мембраны с выполненными на ее нагружной поверхности полостями высокого разряжения и корпусом с размещенным в нем подвижным поршнем, шток которого соединен с центральной частью сферической мембраны и выполнен полым с подводящими каналами для соединения через подпружиненные запорные элементы с полостями высокого разряжения. 7 ил.
ВАКУУМНЫЙ ЗАХВАТ, содержащий вакуум-присосную камеру, соединяемую с источником вакуума и образованную эластичным элементом и корпусом с размещенным в нем подвижным поршнем, шток которого соединен с центральной частью эластичного элемента вакуум-присосной камеры, отличающийся тем, что упомянутый шток выполнен полым с подводящими каналами, а эластичный элемент вакуум-присосной камеры выполнен в виде сферической мембраны с выполненными на ее наружной поверхности полостями высокого разряжения, соединенными через подпружиненные запорные элементы с подводящими каналами полого штока для соединения с источником высокого вакуума или с атмосферой, при этом вакуум-присосная камера выполнена с возможностью соединения с источником сжатого воздуха.
| Вакуумное захватное устройство | 1976 |
|
SU637312A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
