Изобретение относится к машиностроению, а именно к грузозахватным устройствам, и предназначено для захвата, манипулирования и транспортирования штучных грузов.
Известна конструкция вакуумного захвата, трубчатые уплотнительные манжеты которого образуют периферийную и центральную полости вакуумных камер, соединяемые с одним каналом вакуумирования [1]
Известен также захват, содержащий корпус с уплотнением, центральную вакуумную камеру и периферийную камеру, разделенную радиальными перегородками, причем первая из камер соединена с источником вакуума посредством канала, а вторая посредством дросселирующих отверстий [2]
Недостатком известных конструкция вакуумных захватов является невозможность их использования для работы под водой вследствие неизбежного попадания воды в вакуумную систему.
Наиболее близким техническим решением, выбранным в качестве прототипа, является конструкция вакуумного захвата, состоящего из полого жесткого корпуса, соединенного с уплотнением и эластичной кольцевой диафрагмой, разделяющей полость корпуса на центральную поддиафрагменную полости и периферийную полость, последняя из которых сообщается с источником вакуума через дополнительный запорный вентиль и датчик вакуума, а сообщение полостей между собой осуществляется посредством регулируемого дросселя с дополнительным запорным вентилем [3]
Недостатком известного вакуумного захвата является возможность значительной деформации эластичной перегородки диафрагмы, разделяющей центральную и периферийную камеры, и, как следствие этого, раскрытие стыка уплотнения между камерами, что снижает эффективность работы захвата в воздушной среде и исключает возможность его использования для работы под водой.
Целью изобретения является расширение функциональных возможностей и повышение эффективности работы захвата.
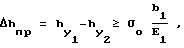
Это достигается тем, что в корпусе захвата с концентрично установленными на нем кольцевыми уплотнениями, образующими с корпусом и поверхностью базирования захвата центральную вакуумную и периферийную кольцевую камеры, периферийная полость образована кольцевой проточкой, на расположенных на одном уровне торцовых кромках которой установлены кольцевые уплотнения, разность высот которых определяется по формуле:
Δhгер= hy1-hy2≥ σo (1) где hу1 и hу2 соответственно высоты наружного и внутреннего кольцевых уплотнений;
(1) где hу1 и hу2 соответственно высоты наружного и внутреннего кольцевых уплотнений;
Go необходимое для герметизации удельное напряжение деформации наружного стыка;
b1 ширина наружного уплотнения;
Е1 модуль упругости материала наружного уплотнения.
При этом соединение камер выполнено с одним или несколькими источниками вакуума. Такое исполнение захвата позволяет надежно герметизировать наружный стык уплотнения при установке захвата на поверхности, а наличие в конструкции жесткой, недеформируемой периферийной полости позволяет повысить эффективность работы захвата в целом. Кроме того, конструктивное исполнение кольцевой проточки с размерами, удовлетворяющими условию: (h1-h2)+
(h1-h2)+  cosαпл.э≅
cosαпл.э≅  (2) где h1 и h2 соответственно высоты периферийной кольцевой и центральной вакуумной камер;
(2) где h1 и h2 соответственно высоты периферийной кольцевой и центральной вакуумной камер;
b2 ширина внутреннего уплотнения;
bпер ширина периферийной кольцевой проточки;
αпл.э= arctg
Ру рабочее вакуумметрическое давление в центральной камере;
ρ плотность жидкой среды позволяет использовать предложенный захват для работы как в воздушной, так и в водной средах, чем значительно расширяется область его применения.
Вакуумный захват предлагаемой конструкции может быть использован с системой вакуумирования, в которой разряжение в центральной полости может осуществляться посредством подсоединения последней к аккумуляторному источнику вакуума, в то время как периферийная полость соединяется с источником вакуума малой производительности, специально рассчитанным на удаление из периферийной камеры натекающего в нее атмосферного воздуха. Этим обеспечивается рациональное использование энергетических ресурсов, а значит и повышается эффективность работы захвата.
На фиг. 1 изображен вакуумный захват, общий вид; на фиг.2 пример работы захвата в воздушной среде; на фиг. 3 пример работы захвата в водной среде; на фиг.4 расчетная схема, используемая при выводе математических зависимостей конструктивных параметров.
Вакуумный захват содержит корпус 1, выполненный в виде диска с центральным отверстием и кольцевой периферийной проточкой 2, на расположенных на одном уровне торцовых кромках которой установлены кольцевые уплотнения 3 и 4, разность высот которых определяется по формуле (1).
При этом конструктивное исполнение кольцевой проточки должно удовлетворять условию (2).
При установке захвата на поверхности базирования внутреннее уплотнение 4 образует с корпусом 1, внутренней частью кольцевой перегородки проточки 2 и поверхностью захватываемого изделия центральную вакуумную камеру 5,а периферийная камера 6 образуется полостью кольцевой проточки 2 и поверхностью базирования.
Кольцевая периферийная камера 6 посредством воздухопровода 7 через распределительный элемент 8 может соединяться с источником 9 вакуума постоянной производительности, специально рассчитанным на режим удаления натекающего из окружающего пространства в периферийную камеру атмосферного воздуха. Центральная вакуумная камера 5 при этом может сообщаться посредством воздухопровода 10 через распределительный элемент 11 (показан условно) с аккумуляторным источником вакуума 12, в качестве которого может быть использован замкнутый резервуар с пониженным давлением внутри. Полость резервуара через запорный элемент 13 подсоединяется к источнику вакуума 9.
Вакуумный захват работает следующим образом.
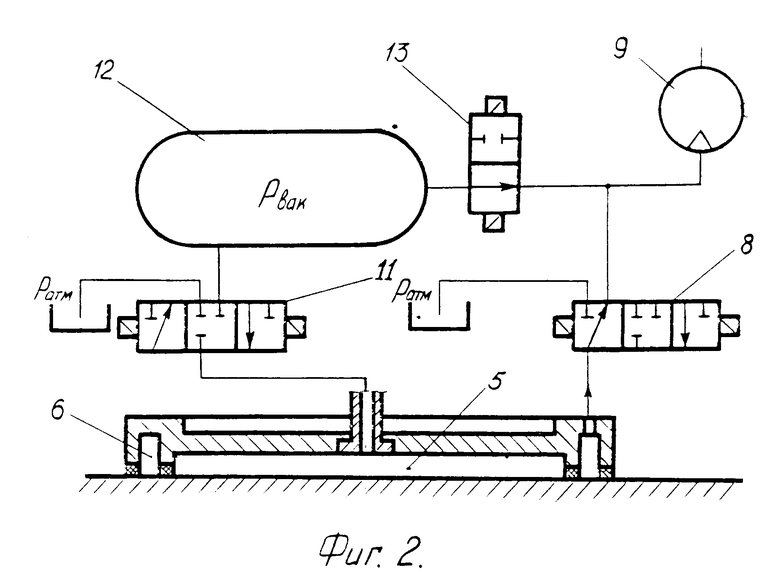
При работе в воздушной среде одновременно с опусканием захвата на поверхность захватываемой детали в работу включается источник вакуума постоянной производительности. Затем распределительные элементы 8 и 11 устанавливаются в положение, при котором вакуумная камера 5 и периферийная камера 6 соединяются соответственно с источниками вакуума 12 и 9. В результате разряжения в вакуумной камере 5 и периферийной камере 6 захват прижимается к поверхности давлением атмосферного воздуха. При неплотном местном прилегании уплотнения 3 к поверхности изделия, атмосферный воздух поступает в периферийную перегородку 6, откуда от непрерывно удаляется по воздухопроводу 7.
Таким образом даже при значительном натекании воздуха полость вакуумной камера 5 окружена периферийной полостью с пониженным давлением, что вследствие снижения перепада давлений между камерами препятствует натеканию воздуха в центральную полость 6. Поэтому после установления захвата на поверхности распределительный элемент 11 может быть установлен в положение "Закрыто", а надежность работы захвата обеспечивается работой источника вакуума 9 малой производительности, специально рассчитанным на режим удаления натекающего в периферийную камеру 6 атмосферного воздуха. Восстановление заданной величины вакуумметрического давления в аккумуляторном источнике вакуума 12, работающего лишь в момент установления захвата на поверхности, осуществляется перестановкой запорного элемента 13 в положение "Открыто" и может происходить на любом промежутке времени функционирования захвата. Такая работа обеспечивает рациональное использование энергетических ресурсов, а значит и повышает эффективность функционирования захвата.
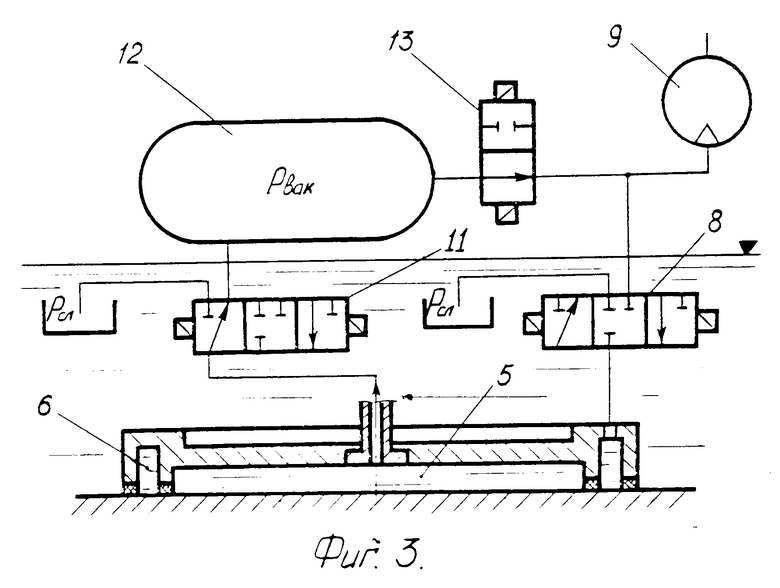
При работе захвата под водой, перед его установкой на поверхности базирования распределительный элемент 8 устанавливается в позицию, в которой периферийная полость сообщается с окружающей средой, в то время как распределительный элемент 11 закрыт. Сообщение периферийной полости с внешней средой обеспечивает ее полное заполнение жидкостью при любой пространственной ориентации захвата. После этого захват опускают на поверхность изделия и прикладывают в осевом направлении установочное усилие:
Fнач ≥π dср1 b1 Gо, где dср1 средний диаметр наружного кольцевого уплотнения;
b1 ширина наружного кольцевого уплотнения;
Go необходимое для герметизации удельное напряжение деформации наружного стыка.
При этом происходит деформация наружного уплотнения 3 на величину, обеспечивающую контакт внутреннего уплотнения 4 с поверхностью базирования и гарантирующую герметичность наружного стыка уплотнения с поверхностью изделия, а из кольцевой периферийной камеры 6 в окружающее пространство вытесняется некоторое избыточное количество жидкости. Сразу после этого распределительный элемент 11 устанавливается в позицию, соединяющую центральную вакуумную камеру 5 с аккумуляторным источником вакуума 12. В результате падения давления в вакуумной камере 5 захват прижимается перепадом давлений к поверхности, а из периферийной камеры вытесняется еще некоторое количество жидкости. По окончании установления захвата на поверхности распределительный элемент 8 закрывается и остается закрытым на всем промежутке времени работы захвата.
Ввиду незначительной сжимаемости жидкости ее просачивание в полностью заполненную водой периферийную камеру 6 из внешнего пространства невозможно. Если периферийная проточка 2 выполнена в соответствии с приведенными соотношениями конструктивных параметров, то перетеканию воды из кольцевой периферийной камеры 6 в вакуумную камеру 5 препятствует установление в периферийной камере высокого вакуума, в случае удаления из нее хотя бы незначительного количества жидкости. Таким образом, заполняющая кольцевую камеру жидкость препятствует натеканию воды в центральную вакуумную полость 5, чем и обеспечивается надежность работы захвата под водой.
Кроме того, данная система вакуумирования центральной камеры 5 допускает попадание в нее жидкости, что и определяет принципиальную возможность использования заявляемого захвата для работы в подводных условиях.
Как и в случае работы в воздушной среде, восстановление заданной величины вакуумметрического давления в аккумуляторном источнике вакуума 12 осуществляется подсоединением его полости к источнику вакуума 9, путем установки запорного элемента 13 в положение "Открыто".
В случае необходимости отжатия захвата от поверхности изделия распределительные элементы 8 и 11 устанавливаются в положение, при котором рабочие камеры 5 и 6 захвата соединяются с внешней средой.
Захват может быть использован как для транспортировки штучных изделий, так и в конструкциях мобильных транспортных средств, удерживаемых на поверхности при помощи вакуумных присосок и осуществляющих перемещения из воздушной среды в водную или наоборот.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2035376C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2048418C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНЫМ ПОВЕРХНОСТЯМ | 1992 |
|
RU2051058C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНЫМ ПОВЕРХНОСТЯМ ТРУБОПРОВОДОВ | 1991 |
|
RU2023619C1 |
| УСТРОЙСТВО ДЛЯ ЗАЧИСТКИ СВАРНЫХ ШВОВ | 1994 |
|
RU2115518C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ | 1995 |
|
RU2112942C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА | 1991 |
|
RU2010181C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 1993 |
|
RU2047089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУР ТВЭЛОВ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2129312C1 |

Использование: машиностроение, в конструкциях захватных органов манипуляторов. Сущность изобретения: в корпусе 1 захвата выполнена кольцевая периферийная проточка 2, на торцевых кромках которой установлены разновеликие кольцевые уплотнения 3 и 4. Величина этих уплотнений выбирается из условия обеспечения герметизации наружного стыка уплотнения при установке захвата на поверхность объекта. При этом соединение центральной вакуумной и охватывающей ее периферийной кольцевой полостей захвата осуществляется как с одним, так и с несколькими источниками вакуума. 1 з. п. ф-лы, 4 ил.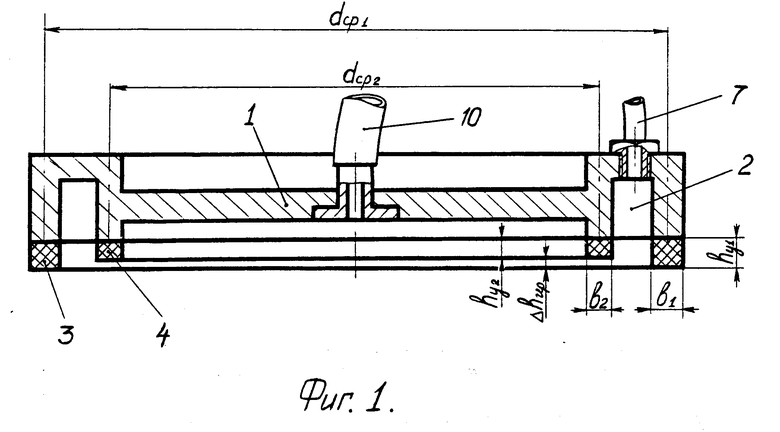
где hу1 и hу2 соответственно высоты наружного и внутреннего кольцевых уплотнений;
σo необходимое для герметизации удельное напряжение деформации наружного стыка;
b1 ширина наружного уплотнения;
E1 модуль упругости материала наружного уплотнения,
а соединение камер выполнено с одним или несколькими источниками вакуума.
где h1 и h2 соответственно высоты периферийной кольцевой и центральной вакуумной камер;
b2 ширина внутреннего уплотнения;
bпер ширина периферийной кольцевой проточки;
Pц рабочее вакуумметрическое давление в центральной камере;
ρ плотность жидкой среды;
g ускорение свободного падения.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
