Изобретение относится к оптической технике и может быть использовано в обзорно-поисковых системах.
Известно устройство поиска объектов, в котором с помощью оптико-механического сканирующего устройства осуществляется сканирование теплового или инфракрасного поля по строкам и кадру и осуществляется регистрация обнаруженных излучателей. Однако точность определения координат зависит от времени обзора и уменьшается с увеличением времени обзора.
Известно устройство поиска объектов, в котором с помощью оптико-механического сканирующего устройства осуществляется сканирование теплового или инфракрасного поля по строкам и кадру. От оптико-механического сканирующего устройства тепловая или инфракрасная энергия через объектив поступает в рабочий фотоприемник, где преобразуется в электрический сигнал. Далее осуществляется выделение этого сигнала по максимальной амплитуде относительно других сигналов с помощью селектора по амплитуде. Отображение координат излучателей осуществляется на индикаторе. Однако точность определения вертикальной координаты в результате сканирования по кадру зависит от скорости сканирования, угла поля зрения объектива, т.е. точность определения координат при увеличении скорости сканирования уменьшается в связи с тем, что уменьшается количество строк, пересекающих излучатель. Таким образом, нельзя уменьшить время поиска, сохранив при этом точность определения координат.
Цель изобретения уменьшение времени поиска без уменьшения точности определения координат.
Достигается это тем, что в устройство поиска объектов, содержащее оптико-механическое сканирующее устройство, объектив, рабочий фотоприемник и селектор по амплитуде, установленные на одной оптической оси, а также индикатор, дополнительно введены два контрольных излучателя, два контрольных фотоприемника, координатор и корректор координат, содержащий два преобразователя длительности сигнала в код, блок параллельных линий задержек, вычитатель, два дешифратора и два сумматора, при этом выход объектива оптически связан с первым и вторым контрольными фотоприемниками, а выход первого контрольного фотоприемника соединен с первым входом корректора координат, соединенным с входом первого преобразователя длительности сигнала в код, группа выходов которого соединена с группой входов первого дешифратора, группа выходов которого соединена с первой группой входов первого сумматора, вторая группа входов которого соединена с группой выходов второго дешифратора, группа входов которого соединена с группой выходов вычитателя, первая группа входов которого соединена с группой выходов блока параллельных линий задержек, группа входов которого соединена с группой выходов второго преобразователя длительности сигнала в код, а вторая группа входов вычитателя соединена с этой же группой выходов второго преобразователя, вход которого соединен с вторым входом корректора координат, соединенным с выходом селектора по амплитуде, соединенным также с первым входом координатора, а группа выходов первого сумматора соединена с первой группой входов второго сумматора, вторая группа входов которого соединена с группой третьих входов корректора координат, соединенной с первой группой выходов координатора, а группа выходов второго сумматора корректора координат соединена с группой выходов корректора координат, а второй и третий входы координатора соединены соответственно с выходами первого и второго контрольных фотоприемников, при этом первый и второй контрольные излучатели оптически связаны по выходам соответственно с первым и вторым оптическими входами оптико-механического сканирующего устройства.
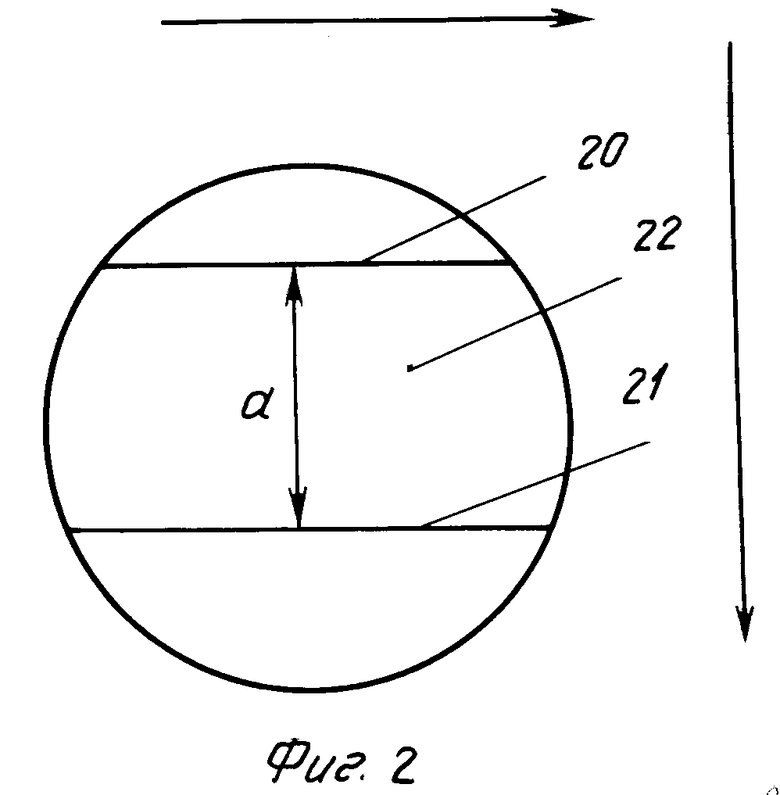
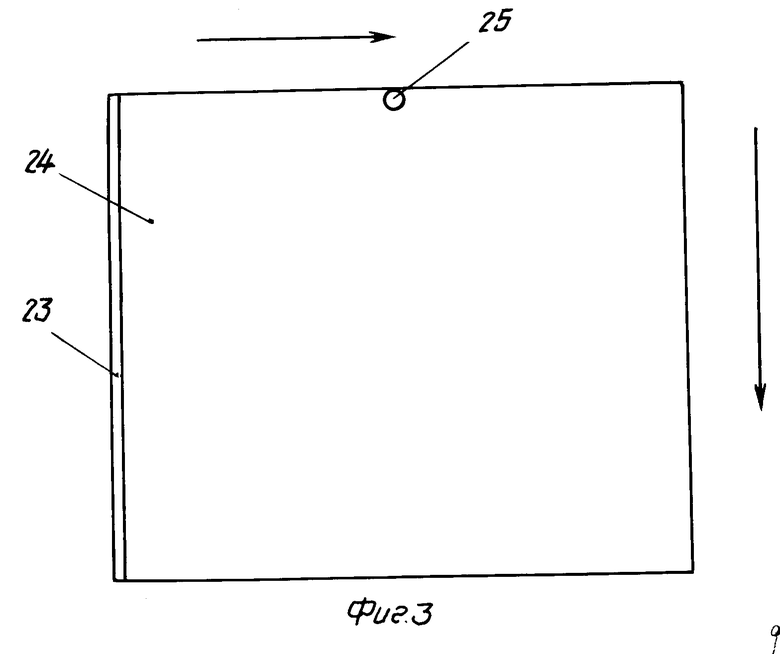
На фиг. 1 представлена структурная схема устройства поиска объектов; на фиг. 2 зона сканирования и расположение излучателей; на фиг. 3 поле зрения объектива.
Устройство содержит контрольные излучатели 1 и 2, оптически связанные по выходу с оптико-механическим сканирующим устройством 3, имеющим оптическую связь по выходу через объектив 4 с рабочим фотоприемником 5 и с контрольными фотоприемниками 6 и 7. Выход рабочего фотоприемника 5 соединен с входом селектора по амплитуде 8, имеющим выход, соединенный с первым входом координатора 9, вторые и третьи входы которого соединены с выходами контрольных фотоприемников 6 и 7. Одна из групп выходов координатора 9 соединена соответственно с одной из групп входов индикатора 10. Выход контрольного фотоприемника 7 соединен с первым входом корректора координат 11, а выход селектора по амплитуде 8 через второй вход корректора координат 11 соединен с входом второго преобразователя длительности сигнала в код 12, группа выходов которого через блок параллельных линий задержек 13 и непосредственно соединена с первой и второй группами входов вычитателя 14 соответственно, группа выходов которого соединена с группой входов второго дешифратора 15. Выход контрольного фотоприемника 7 соединен с входом первого преобразователя длительности сигнала в код 16, группа выходов которого через первый дешифратор 17 соединена с первой группой входов первого сумматора 18, вторая группа входов которого соединена с группой выходов второго дешифратора 15, а группа выходов с первой группой входов второго сумматора 19, вторая группа входов которого через группу третьих входов корректора координат 11 соединена с другой из групп выходов координатора 9. Группа выходов второго сумматора 19 через группу выходов корректора координат 11 соединена с другой из групп входов индикатора 10.
Работа устройства осуществляется следующим образом.
С помощью оптико-механического сканирующего устройства 3 осуществляется сканирование теплового или инфракрасного поля по строкам и кадру. От оптико-механического сканирующего устройства тепловая или инфракрасная энергия через объектив 4 поступает на рабочий фотоприемник 5, принимающий излучение от излучателя, и контрольные фотоприемники 6 и 7, принимающие излучение от контрольных излучателей 1 и 2, где они преобразуются в электрические сигналы. Выделение сигналов от объектов по максимальной амплитуде относительно других сигналов осуществляется в селекторе по амплитуде 8. Для определения координат излучения объектов с выхода этого селектора 8 выделенные сигналы поступают в координатор 9, измеряющий интервал между видеосигналами от излучателей и началом измерительной системы координат. В частности, он определяет координаты в результате сканирования по строкам и кадру.
Синхронизация осуществляется с помощью контрольных излучателей 1 и 2. Контрольный излучатель 1 выполнен в виде стержня 20 (см. фиг. 2) и расположен вертикально, в одном и том же положении относительно зоны сканирования, обеспечивая выдачу строчного синхроимпульса контрольным фотоприемником 6 в координатор 9 в момент начала каждой строки, а контрольный излучатель 2 является точечным излучателем 21, расположен в верхней части зоны сканирования в одном и том же положении (фиг. 2) и обеспечивает выдачу кадрового синхроимпульса контрольным фотоприемником 7 в момент начала кадра в координатор 9 и корректор координат 11. Стрелками на фиг. 2 показано направление строчного и кадрового сканирования. Каждый из контрольных фотоприемников 6 и 7 настраивается на соответствующий спектр контрольных излучателей 1 и 2, каждый из которых отличен один от другого и от спектра рабочего фотоприемника 5. Координаты относительно начала строки поступают в индикатор 10 для отображения, поэтому для отображения, поэтому длительность сигнала от контрольного излучателя будет характеризовать положение, которое занимает этот излучатель в верхней части объектива 4, относительно центра объектива. Точность определения координат относительно начала кадра зависит от скорости сканирования по кадру.
На фиг. 3 показано поле зрения 22 объектива 4, которое движется в процессе сканирования по строкам и кадру (направление движений показано стрелками) и пересекает излучатель два раза последовательно по отрезкам линий 23, 24. Поэтому длительности сигналов на выходе селектора 8 будут пропорциональны этим отрезкам, а разности этих длительностей и знак разности будут характеризовать вертикальное положение точечного излучателя в поле зрения объектива 4. Для обеспечения достаточной точности измерения это поле зрения должно пересекать излучатель два раза. Следовательно, скорость сканирования по кадру должна быть постоянной и расстояние между отрезками "а" (см. фиг. 3) будет иметь строго постоянное значение. Следовательно, временное рассогласование между двумя сигналами от одного и того же излучателя будет также постоянно.
Корректор координат 11 уточняет вертикальную кадровую координату излучателя при ускорении сканирования. Длительность сигнала, выделенного в селекторе по амплитуде 8, преобразуется в параллельный код во втором преобразователе длительности сигнала в код 12. Параллельный код поступает непосредственно на первую группу входов вычитателя 14 и через блок параллельных линий задержек 13 на вторую группу входов вычитателя 14. Величина задержки равна указанному временному рассогласованию между двумя сигналами от излучателя. Следовательно, разность на выходе вычитателя и ее знак будут характеризовать вертикальное положение излучателя в поле зрения объектива 4, сигнал от которого выделен по амплитуде в селекторе 8. Полученный сигнал разности преобразуется в угловую величину относительно центра объектива 4 во втором дешифратора 15.
С другой стороны, для определения погрешности по вертикали, связанной с положением строчной развертки оптико-механического сканирующего устройства 3, в момент начала кадра относительно точечного контрольного излучателя 2, занимающего одно и то же положение относительно этой развертки, в первом преобразователе длительности сигнала в код 16 осуществляется преобразование длительности сигнала от точечного контрольного излучателя 2 в код, так как строчная развертка в момент пересечения этого излучателя может занимать при механическом сканировании разное положение по вертикали. Это положение может быть ниже того положения, которое она занимала бы, если бы в момент начала кадра находилась в начале строки, так как в этом случае контрольный излучатель 2 находился бы в центре угла поля зрения объектив 4, поэтому угол поля зрения объектива 4 может пересекать точечный излучатель, находясь в начале кадра в различном угломестном положении относительно этого излучателя. Следовательно, на разных угломестных положениях будут разные длительности сигналов, т.е. длительность сигнала будет характеризовать угловую величину. Длительность сигнала от контрольного излучателя 2 будет характеризовать положение, которое занимает этот излучатель в верхней части объектива 4 относительно центра объектива по вертикали, которое преобразуется в соответствующую угловую величину в первом дешифраторе 17. Две угловые поправки дешифраторов 15 и 17 складываются в первом сумматоре 18. Суммарная вертикальная поправка поступает во второй сумматор 19, на который также поступает грубое значение вертикальной координаты с координатора 9, которое складывается с суммарной поправкой. Уточненные значения координаты поступают в индикатор 10 для отображения.
П р и м е р. При размере зоны сканирования теплового или инфракрасного поля 90ох90о и угле поля зрения объектива 1о для определения вертикальной координаты с точностью до 3' в известном устройстве потребуется 1800 строк. Если принять время одной строки 10 мс, то время одного кадра будет составлять 18 с. Изобретение позволяет получить такую же точность при увеличении скорости сканирования по вертикали, обеспечив при этом два пересечения излучателя 2 углом поля зрения объектива 4. В результате количество строк в одном кадре может быть уменьшено в 10 раз и составит 180 строк. Следовательно, время поиска также уменьшится в 10 раз и будет составлять 1,8 с.
Изобретение может быть использовано при создании устройств для обнаружений излучателей самолетов, ракет и других движущихся скоростных излучателей, систем предупреждения столкновений и обеспечит повышение качества работы подобных систем благодаря уменьшению времени поиска объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 1995 |
|
RU2096809C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2094818C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081440C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081431C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2313106C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097788C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028645C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ | 1998 |
|
RU2164004C2 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
Использование: оптическая техника, обзорно-поисковые системы. Сущность изобретения: в устройство поиска объектов, содержащее оптико-механическое сканирующее устройство 3, объектив 4, рабочий фотоприемник 5, селектор по амплитуде 8 и индикатор 10, введены два контрольных излучателя 1, 2, два контрольных фотоприемника 6, 7, координатор 9 и корректор координат 11, содержащий преобразователи длительности сигнала в код 12, 16, блок параллельных линий задержек 13, вычитатель 14, дешифраторы 15, 17, сумматоры 18, 19. 3 ил.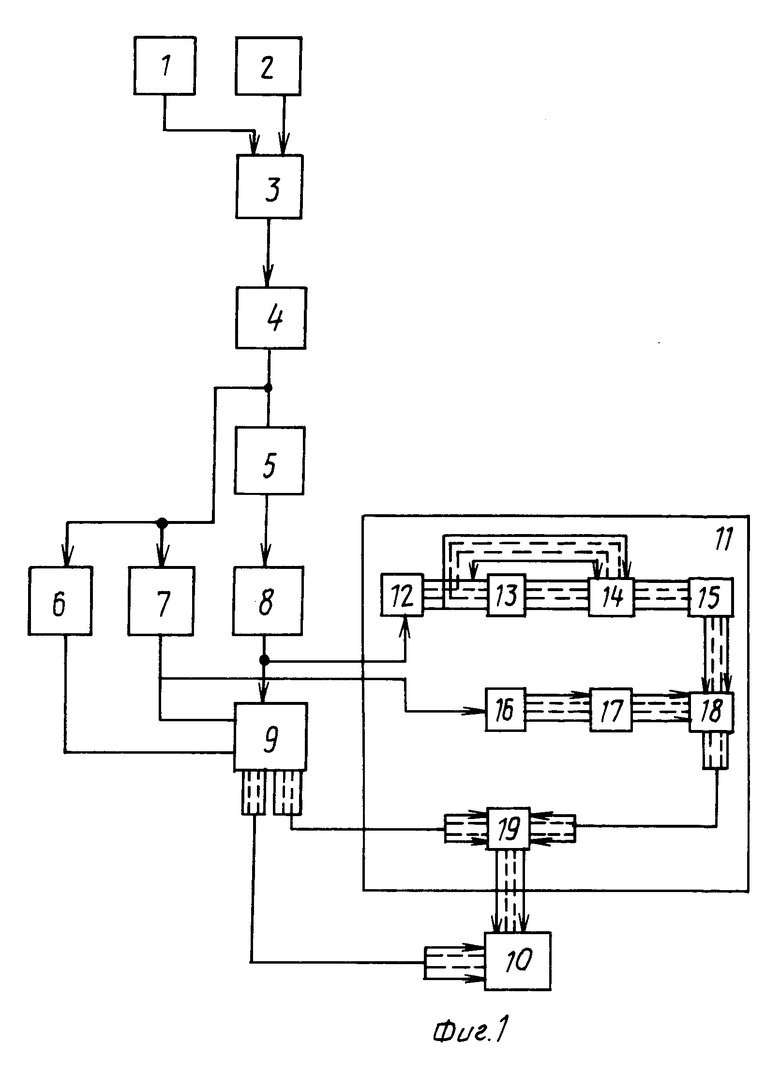
УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ, включающее оптико-механическое сканирующее устройство, объектив, рабочий фотоприемник и селектор по амплитуде, установленные на одной оптической оси, а также индикатор, отличающееся тем, что устройство дополнительно содержит два контрольных излучателя, два контрольных фотоприемника, координатор и корректор координат, содержащий два преобразователя длительности сигнала в код, блок параллельных линий задержек, вычитатель, два дешифратора и два сумматора, при этом выход объектива оптически связан с первым и вторым контрольными фотоприемниками, а выход первого контрольного фотоприемника соединен с первым входом корректора координат, соединенным с входом первого преобразователя длительности сигнала в код, группа выходов которого соединена с группой входов первого дешифратора, группа выходов которого соединена с первой группой входов первого сумматора, вторая группа входов которого соединена с группой выходов второго дешифратора, группа входов которого соединена с группой выходов вычитателя, первая группа входов которого соединена с группой выходов блока параллельных линий задержек, группа входов которого соединена с группой выходов второго преобразователя длительности сигнала в код, а вторая группа входов вычитателя соединена с этой же группой выходов второго преобразователя, вход которого соединен с вторым входом корректора координат, соединенным с выходом селектора по амплитуде, соединенным также с первый входом координатора, а группа выходов первого сумматора соединена с первой группой входов второго сумматора, вторая группа входов которого соединена с группой третьих входов корректора координат, соединенной с первой группой выходов координатора, а группа выходов второго сумматора корректора координат соединена с группой выходов корректора координат, а второй и третий входы координатора соединены соответственно с выходами первого и второго контрольных фотоприемников, при этом первый и второй контрольные излучатели оптически связаны по выходам соответственно с первым и вторым оптическими входами оптико-механического сканирующего устройства.
| Василевский А.М | |||
| и др | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
