Изобретение относится к измерительной технике и может быть использовано одновременно как для дистанционной передачи угла поворота вала датчика, так и для преобразования угла поворота вала в код.
Известна следящая система дистанционной передачи угла поворота вала датчика, образующая первый канал преобразования [1] и содержащая приемник, двигатель и выявитель рассогласования, вырабатывающий сигнал управления двигателем по методу сравнения амплитуд (трансформаторный режим) или по методу сравнения фаз (фазовый режим). Синхронизирующее напряжение подается на вход датчика и обмотку возбуждения двигателя. Одновременно при подключении к датчику преобразователя осуществляется преобразование угла в код, т.е. образуется второй канал преобразования. Точность такой системы находится в пределах 1.3 угл. мин, что в большинстве случаев удовлетворяет требованиям потребителей, однако точность по каналу преобразования угла в код не лучше 10.20 угл.мин, что является недостатком такой системы преобразования.
Известна двухканальная система преобразования угла, содержащая двухотсчетный датчик, обмотки грубого и точного отсчета которого выполнены в одном магнитопроводе, выход грубого отсчета датчика соединен со входом канала следящей системы дистанционной передачи угла, выходы грубого и точного отсчетов датчика соединены со входами блока преобразования электрических сигналов датчика в код [2]
Недостатком такой системы преобразования угла является возникновение погрешности как в грубом отсчете (ГО), так и в точном отсчете (ТО) датчика из-за взаимного влияния обмоток ГО и ТО, размещенных на одном магнитопроводе, в результате чего точность следящей системы дистанционной передачи угла ухудшается до 30.60 угл.мин.
Технический результат изобретения заключается в исключении взаимного влияния точного и грубого отсчетов датчика двухканальной системы преобразования угла.
Для этого в двухканальную систему преобразования угла, содержащую двухотсчетный датчик, обмотки грубого и точного отсчетов которого выполнены на одном магнитопроводе, выход грубого отсчета датчика подсоединен к входу канала следящей системы дистанционной передачи угла, синхронизирующий вход которого соединен с входом грубого отсчета датчика, выходы грубого и точного отсчетов датчика подсоединены к входам блока преобразования электрических сигналов датчика в код, первый источник возбуждения, выход которого соединен с входом точного отсчета датчика, введены второй источник возбуждения и делитель частоты, вход делителя частоты соединен с выходом первого источника возбуждения, выход делителя частоты соединен с входом второго источника возбуждения, выход которого соединен с входом грубого отсчета датчика.
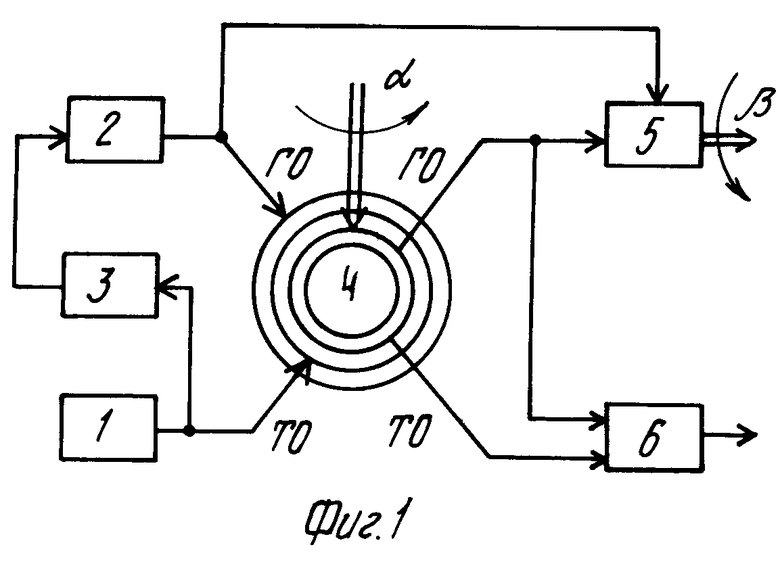
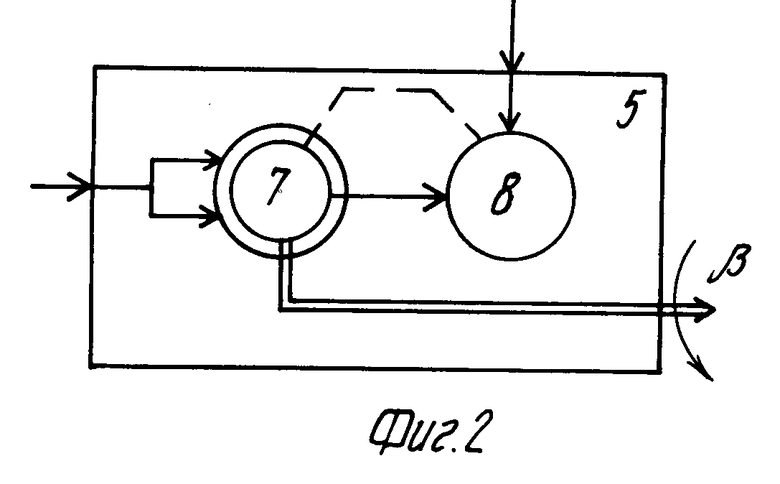
На фиг. 1 приведена структурная схема двухканальной системы преобразования угла (ДСПУ); на фиг.2 пример выполнения канала следящей системы дистанционной передачи угла (ССДПУ) в трансформаторном режиме.
ДСПУ содержит первый 1 и второй 2 источники возбуждения, делитель 3 частоты, двухотсчетный датчик 4, канал 5 следящей системы дистанционной передачи угла, блок 6 преобразования электрических сигналов датчика в код. Канал ССДПУ 5 содержит приемник 7 и двигатель 8.
ДСПУ работает следующим образом.
При применении в качестве датчика 4 синусно-косинусного вращающегося трансформатора сигналы U1 и U2 с выхода ГО датчика 4 поступают по двум линиям связи в канал 5 ССДПУ на косинусный и синусный входы приемника 7:
U1 Vsin αsinω t + Ug1,
U2 Vcos αsinω t + Ug2, где ω, V частота и амплитуда напряжения источника 2 возбуждения;
α угол поворота ротора датчика 4;
Ug1, Ug2 дополнительные составляющие сигналов ГО датчика 4, обусловленные влиянием включенного ТО датчика 4 и вызывающие погрешность ГО.
В свою очередь, Ug1 и Ug2 можно представить в виде:
Ug1 V1(N ω, α) sinN ω t,
Ug2 V2(N ω, α) sinN ω t, где V1(N ω, α), V2(N ω, α) амплитуда дополнительных составляющих сигналов ГО датчика 4, являющиеся функциями N ω, α,
N ω, частота источника возбуждения 1;
N коэффициент деления делителя 3 частоты.
На выходной обмотке приемника 7, выполняющего функцию выявителя рассогласования, вырабатывается сигнал рассогласования:
Up U1cos β + U2sin β
Vsin(α β)sin ω t + V(N ω, α, β) sinN ω t, где β угол поворота ротора приемника 7,
V(N ω, α β) приведенная амплитуда дополнительных составляющих сигнала ГО датчика 4, являющаяся функцией N ω, α, β.
Сигнал рассогласования поступает на управляющую обмотку двигателя 8, на обмотку возбуждения которого подается синхронизирующее напряжение с входа ГО датчика 4. Так как вращающий момент двигателя 8 возникает на частоте синхронизации ω, совпадающей с частотой источника возбуждения 2, то вторая составляющая сигнала рассогласования V(N ω, α, β)sinN ω t воспринимается как временная гармоника с кратностью N и не создает вращающего момента. Следовательно, только первая составляющая сигнала рассогласования будет определять вращающий момент двигателя 8, который, вращая приемник 7, приведет его в согласованное состояние:
Vsin (α β) 0, откуда α β.
Таким образом, устраняется влияние ТО на ГО.
Отметим, что в случае подключения входов ГО и ТО датчика 4 к одному источнику возбуждения, что характеризуется N 1, уже α ≠ β и ошибка дистанционной передачи угла определилась бы из решения уравнения:
Vsin ( α β) + V( ω, α, β) 0.
Для реальных уровней дополнительных составляющих сигналов ГО датчика 4, достигающих 1.2% напряжения возбуждения, погрешность канала ССДПУ 5 составила бы:
δ α-β 
 30.60′
30.60′
что является недопустимым.
Блок 6 использует оба отсчета ГО и ТО датчика 4, преобразуя α в выходной код К, и ГО необходим только для однозначности отсчета.
Требования к точности ГО невысоки и точность блока 6 определяет только ТО. Поэтому необходимо уменьшать влияние уже ГО на ТО. В рассматриваемой структуре это обеспечивается тем, что частота возбуждения ГО в N раз меньше частоты возбуждения ТО. При увеличении N частота возбуждения ГО понижается и величина наводки из ГО в ТО уменьшается. Одновременно с увеличением N в канале ТО облегчается фильтрация проникших наводок из канала ГО благодаря разнесению частот возбуждения ГО и ТО. Следовательно, влияние ГО на ТО также резко ослаблено, что в целом обеспечивает повышение точности как канала 5 ССДПУ, так и блока 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2079101C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕЩЕНИЯ В КОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1992 |
|
RU2068619C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2068620C1 |
| Двухотсчетный преобразователь синусно-косинусно-модулированных сигналов переменного тока в код | 1985 |
|
SU1283969A1 |
| ЦИФРОВОЙ ДАТЧИК УГЛА С ЦИФРОВОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ | 2014 |
|
RU2554561C1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1979 |
|
SU924736A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
Изобретение относится к измерительной технике и может быть использовано одновременно как для дистанционной передачи угла поворота вала датчика, так и для преобразования угла поворота вала в код. Изобретение позволяет исключить взаимное влияние точного и грубого отсчетов датчика в двухканальной системе преобразования угла и повысить точность преобразования. Это достигается тем, что в двухканальную систему преобразования угла, содержащую двухотсчетный датчик с совмещенными на одном магнитопроводе обмотками, первый источник возбуждения, канал следящей системы дистанционной передачи угла, блок преобразования электрических сигналов датчика в код, введены второй источник возбуждения и делитель частоты. 2 ил.
ДВУХКАНАЛЬНАЯ СИСТЕМА ПРЕОБРАЗОВАНИЯ УГЛА, содержащая двухотсчетный датчик, обмотки грубого и точного отсчетов которого выполнены на одном магнитопроводе, выход грубого отсчета датчика подсоединен к входу канала следящей системы дистанционной передачи угла, синхронизирующий вход которого соединен с входом отсчета датчика, выходы грубого и точного отсчетов датчика подсоединены к входам блока преобразования электрических сигналов датчика в код, первый источник возбуждения, выход которого соединен со входом точного отсчета датчика, отличающаяся тем, что в нее введены второй источник возбуждения и делитель частоты, вход делителя частоты соединен с выходом первого источника возбуждения, выход делителя частоты соединен с входом второго источника возбуждения, выход которого соединен с входом грубого отсчета датчика.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| "Elektronic Design", 10, Жау 10, 1970, р.98-103. | |||
