Изобретение относится к области автоматики и робототехники и может быть использовано в высокоточных следящих приводах с цифровыми датчиками угла (ЦДУ), в которых точность ЦДУ должна лежать в пределах нескольких угловых секунд.
В высокоточных цифровых следящих приводах широкое применение получили ЦДУ, которые состоят из первичных датчиков угла типа синусно-косинусных вращающихся трансформаторов (СКВТ) и аналого-цифровых преобразователей сигналов СКВТ в цифровой код (АЦП ВТ). Как правило, такие ЦДУ строятся по двухотсчетной схеме. На одном валу первичного датчика угла устанавливается датчик угла точного отсчета (СКВТ ТО) с электрической редукцией, равной двоичному числу (16, 32, 64 и т.д.), и датчик угла грубого отсчета (СКВТ ГО) с электрической редукцией, равной единице. Электрическая редукция в СКВТ равна числу периодов выходного электрического сигнала на один оборот вала. Выходные сигналы СКВТ ТО поступают на вход АЦП ВТ ТО, на выходе которого формируется цифровой код ТО. Выходные сигналы СКВТ ГО поступают на вход АЦП ВТ ГО, на выходе которого формируется цифровой код ГО. Число разрядов кода ГО определяется числом электрической редукции СКВТ ТО (если эл. ред.=64, то число разрядов ГО должно быть 6, т.к. 64=26). Число разрядов кода ТО зависит от разрядности АЦП ВТ ТО. Полный выходной код ЦДУ формируется путем «стыковки» кода ГО с кодом ТО. Таким образом, для построения, например, 20-разрядного ЦДУ нужно использовать СКВТ ТО с электрической редукцией, равной 64 (например, БВТВ100-С28 фирмы ОАО «ВНИТИ ЭМ», г. Санкт-Петербург), и АЦП ВТ ТО с числом разрядов, равным 14 (например, 2602ПВ1БП фирмы ОАО «НИИ-ЭМП», г. Пенза).
Точность высокоразрядных ЦДУ с первичными датчиками угла типа СКВТ в основном определяется погрешностями СКВТ ТО. Кривые погрешностей СКВТ ТО привязаны к электрическому периоду выходного сигнала, а значит повторяются за один оборот вала ЦДУ число раз, равное числу электрической редукции. Эти погрешности имеют систематический характер и отличаются от образца к образцу по характеру и по граничным значениям. Например, БВТВ100-С28 фирмы ОАО «ВНИТИ ЭМ», который можно использовать в качестве СКВТ ТО в 20-разрядном ЦДУ, имеет заявленную в технических условиях погрешность ±30 угл. с. Цена единицы младшего разряда 20-разрядного ЦДУ в угловой мере равна 360°/220=1,24 угл. с. Поэтому разработчики высокоточных ЦДУ, если точность собственно СКВТ ТО не укладывается в рамки предъявляемых к ЦДУ требований, принимают технические решения для повышения точности ЦДУ в целом.
Известны схемотехнические решения ЦДУ, в которых для повышения точности ЦДУ, наряду с основным АЦП ВТ ТО, вводится корректирующий канал с дополнительными цифроаналоговыми преобразователями (ЦАП) и аналого-цифровыми преобразователями (АЦП) и с элементами подстройки, предназначенный для формирования корректирующих поправок аппаратным аналоговым способом.
Недостатками данных ЦДУ являются необходимость использования дополнительных ЦАП и АЦП с элементами подстройки и сложность выявления функции погрешности, которое производится на специальных метрологических стендах с использованием высокоточных оптических угломеров.
Из известных устройств подобного типа наиболее близким по технической сущности к заявляемому ЦДУ является выбранный в качестве прототипа цифровой преобразователь угла (патент №2308148), содержащий дополнительные аналого-цифровые преобразователи, функциональные цифроаналоговые преобразователи и оперативное запоминающее устройство (ОЗУ), которые используются для выявления функции погрешности и ее коррекции в аналоговом виде.
К недостаткам этого ЦДУ можно отнести то, что для выявления функции погрешности ЦДУ должен быть переведен в режим вращения вала (ротора) с определенной угловой скоростью, при которой проявляются фильтрующие свойства ЦДУ следящего типа и объемность аппаратуры преобразования выявленной погрешности в виде напряжения постоянного тока в массив цифровой информации и затем обратно в напряжение постоянного тока.
В предлагаемом ЦДУ решается задача повышения точности (коррекции погрешности) путем автоматического выявления в режиме тестирования (в процессе подготовки к контролю качества) систематической погрешности ЦДУ и фиксации ее в энергонезависимой памяти МПК в виде таблицы поправок. При работе ЦДУ в штатном режиме выходной код выдается по рабочему интерфейсу с учетом этих поправок, что позволяет значительно (при необходимости в несколько раз) повысить точность ЦДУ.
Для решения этой технической задачи в ЦДУ, содержащий двухотсчетный индукционный датчик угла типа СКВТ, состоящий из СКВТ точного отсчета (СКВТТО) и СКВТ грубого отсчета (СКВТ ГО), синусные и косинусные выходы которых соединены с синусными и косинусными входами двухканального аналого-цифрового преобразователя сигналов СКВТ в код угла (АЦП ВТ) следящего типа, введены микропроцессорный контроллер (МПК) (например, 1986ВЕ1Т фирмы ЗАО «ПКК Миландр») с контроллером внешней системной шины с поддержкой микросхем памяти NAND Flash и с контроллером последовательного интерфейса для ввода кода угла эталонного ЦДУ, системная шина, энергонезависимая память NAND Flash, схема формирования сигнала считывания кода с АЦП ВТ в МПК по прерыванию, причем цифровой выход кода угла АЦП ВТ поразрядно подключен к МПК через системную шину, к которой также подключена энергонезависимая память NAND Flash, цифровые выходы N старших разрядов кода ТО из полного кода угла АЦП ВТ (где 2N - число участков коррекции) поразрядно подключены к N цифровым входам схемы формирования сигнала считывания кода с АЦП ВТ в МПК по прерыванию, а однобитный выход схемы соединен с однобитным входом прерывания МПК, код угла эталонного ЦДУ поступает на вход последовательного интерфейса МПК.
На фиг. 1 приведена функциональная схема ЦДУ с цифровой коррекцией погрешности.
ЦДУ с цифровой коррекцией погрешности содержит двухотсчетный индукционный датчик угла 1 типа СКВТ (включающий в себя СКВТ точного отсчета и СКВТ грубого отсчета), аналого-цифровой преобразователь 2 сигналов СКВТ ТО и СКВТ ГО в код угла (АЦП ВТ) следящего типа, микропроцессорный контроллер (МПК) 3 с контроллером внешней системной шины с поддержкой микросхем памяти NAND Flash и с контроллером последовательного интерфейса для ввода кода угла эталонного ЦДУ, системную шину 6, энергонезависимую память NAND Flash 4, схему 5 формирования сигнала считывания кода с АЦП ВТ в МПК по прерыванию.
ЦДУ с цифровой коррекцией погрешности работает следующим образом.
ЦДУ с цифровой коррекцией для проведения операций по тестированию (контролю качества) закрепляется на испытательном стенде и на его вал устанавливают эталонный ЦДУ с полым валом, собственная точность которого достаточна для контроля тестируемого ЦДУ, и осуществляют совмещение нулевых отсчетов эталонного ЦДУ и тестируемого ЦДУ. В качестве эталонного ЦДУ может быть применен высокоточный ЦДУ фирмы «HEIDENHAIN» RCN 829. Этот ЦДУ представляет собой датчик угла (диаметром 200 мм) со встроенными подшипниками, пустотелым валом (диаметром 60 мм) и встроенной муфтой статора. Заявленная погрешность этого датчика ±1 угл. с уже учитывает погрешности, вызываемые встроенной муфтой статора. Конструкция датчика RCN 829 позволяет осуществить практически идеальную схему механического сопряжения его с валом тестируемого ЦДУ.
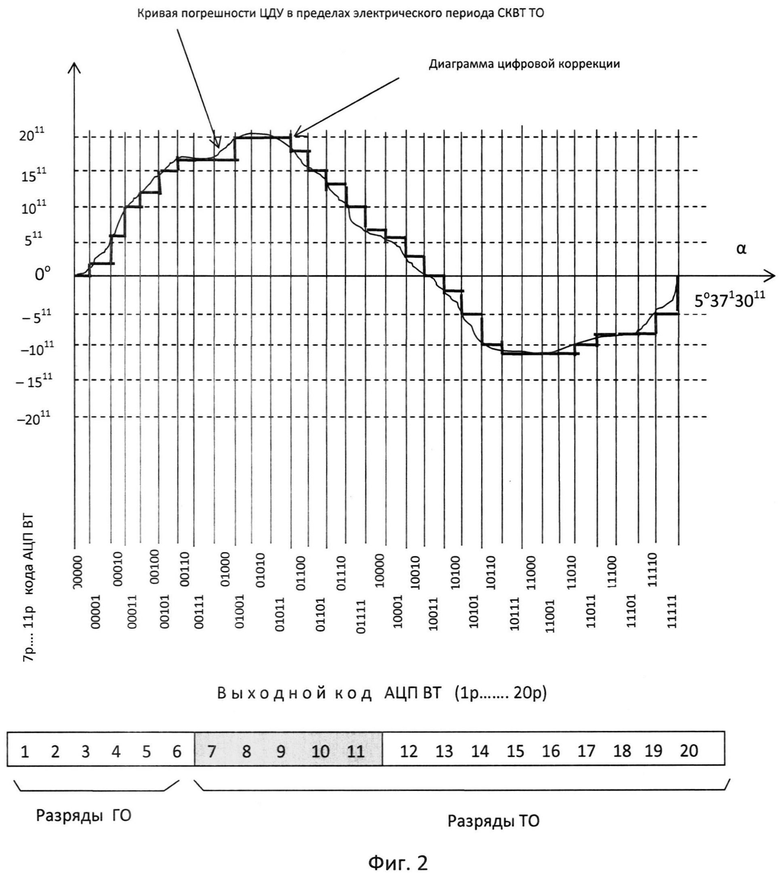
Перед проведением операций по контролю качества проводится операция по выявлению систематической погрешности тестируемого ЦДУ и ее коррекции. Для этого цифровой выход эталонного ЦДУ подключается к последовательному интерфейсу МПК 3 тестируемого ЦДУ. Далее вручную поворачивают вал тестируемого ЦДУ с установленным на нем эталонным ЦДУ, в любую сторону на угол не менее чем угловой интервал электрического периода СКВТ ТО, т.е. для рассматриваемого ЦДУ (где СКВТТО имеет электрическую редукцию 64) на угол, равный 360°/64=5°3713011 (см. Фиг. 2 Примерная кривая погрешности ЦДУ и диаграмма цифровой коррекции). На диаграмме показано, что угловой интервал, соответствующий электрическому периоду СКВТ ТО, разбит на 25=32 участка коррекции, и номер каждого участка коррекции определяется кодом 5-ти старших разрядов кода ТО (7-11 разр. кода АЦП ВТ). В процессе поворота вала тестируемого ЦДУ код с выхода 7-11 разрядов АЦП ВТ 2 поступает на вход схемы 5 формирования сигнала считывания кода с АЦП ВТ в МПК по прерыванию. Каждый раз при прохождении границы очередного участка, начиная с первого, в схеме 5 формирования сигнала считывания кода с АЦП ВТ в МПК происходит смена кода номера участка коррекции, что приводит к формированию на выходе схемы сигнала прерывания, который поступает на однобитный вход МПК 3.
Микропроцессорный контроллер производит обработку сигнала прерывания, которая заключается в следующем.
МПК считывает через системную шину 6 цифровой код с выхода АЦП ВТ 2 и через вход последовательного интерфейса код с выхода эталонного ЦДУ, производит вычитание кода эталонного ЦДУ из кода АЦП ВТ и полученную разность кодов со знаком (поправку) помещает через системную шину 6 в ячейку энергонезависимой памяти 4 под номером участка коррекции. Поправки в рассматриваемом варианте 20-разрядного ЦДУ будут определяться с дискретностью в 1 угл. с. На этом процесс выявления систематической погрешности ЦДУ и формирование таблицы поправок в энергонезависимой памяти заканчивается, выход эталонного ЦДУ отключается от входа последовательного интерфейса.
При работе ЦДУ в штатном режиме МПК 3 в каждом цикле выдачи кода угла по рабочему интерфейсу считывает через системную шину 6 цифровой код с выхода АЦП ВТ 2, анализирует значение кода в 7-11 разрядах (определяет номер участка коррекции), извлекает из ячейки энергонезависимой памяти 4 под этим номером поправку и производит алгебраическое суммирование ее с кодом АЦП ВТ 2. Например, если в момент считывания МПК 3 выходного кода с АЦП ВТ 2 код в 7-11 разрядах будет иметь значение 10101 (см. Фиг. 2), то к выходному коду АЦП ВТ следует добавить 5 единиц младшего разряда, т.е. прибавить 20-разрядный код 00000000000000000101, т.к. на этом участке коррекции погрешность имеет значение минус 5 угл. с.
Таким образом, введение в состав ЦДУ новых устройств с их определенной взаимосвязью между собой и известными устройствами позволяет получить новое для ЦДУ важное качество - выявление на этапе производства систематической погрешности ЦДУ и ее коррекция в цифровой форме без использования сложного стендового оборудования, что повышает точность ЦДУ. Это новое качество ЦДУ позволяет повысить точность следящих систем позиционирования угла, в которых он может применяться.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ДАТЧИК УГЛА СО ЗНАКОВЫМ РАЗРЯДОМ | 2012 |
|
RU2515965C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| КИБЕРНЕТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ ЦИФРОВАЯ СИСТЕМА | 2002 |
|
RU2263943C2 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Двухотчетный преобразователь углового перемещения в цифровой код | 1975 |
|
SU526932A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
Изобретение относится к области автоматики и робототехники и может быть использовано в высокоточных следящих приводах с цифровыми датчиками угла (ЦДУ), в которых точность ЦДУ должна лежать в пределах нескольких угловых секунд. Техническим результатом является повышение точности. Устройство содержит двухотсчетный индукционный датчик угла типа СКВТ, состоящий из СКВТ точного отсчета и СКВТ грубого отсчета, аналого-цифровой преобразователь следящего типа, микропроцессорный контроллер с контроллером внешней системной шины с поддержкой микросхем памяти NAND Flash и с контроллером последовательного интерфейса для ввода кода угла эталонного ЦДУ, системную шину, энергонезависимую память NAND Flash, схему формирования сигнала считывания кода с АЦП в МПК по прерыванию. 2 ил. 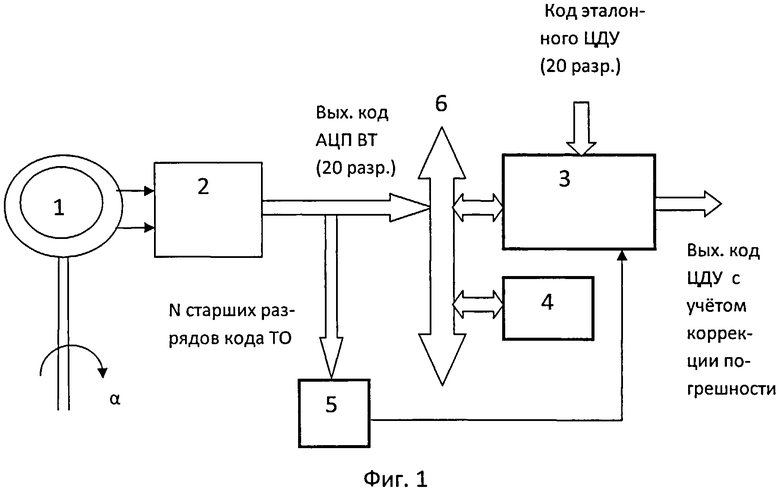
Цифровой датчик угла с цифровой коррекцией погрешности, содержащий двухотсчетный индукционный датчик угла типа синусно-косинусного вращающегося трансформатора (СКВТ), состоящий из СКВТ точного отсчета и СКВТ грубого отсчета, синусные и косинусные выходы которых соединены с синусными и косинусными входами двухканального аналого-цифрового преобразователя сигналов СКВТ в код угла следящего типа, отличающийся тем, что в него введены микропроцессорный контроллер с контроллером внешней системной шины с поддержкой микросхем памяти NAND Flash и с контроллером последовательного интерфейса для ввода кода угла эталонного цифрового датчика угла, системная шина, энергонезависимая память типа NAND Flash, схема формирования сигнала считывания кода с аналого-цифрового преобразователя сигналов СКВТ в микропроцессорный контроллер по прерыванию, причем цифровой выход аналого-цифрового преобразователя сигналов СКВТ в код угла поразрядно подключен к микропроцессорному контроллеру через системную шину, к которой также подключена энергонезависимая память NAND Flash, цифровые выходы N старших разрядов кода точного отсчета из полного кода угла аналого-цифрового преобразователя сигналов СКВТ в код угла поразрядно подключены к N цифровым входам схемы формирования сигнала считывания кода с аналого-цифрового преобразователя сигналов СКВТ в микропроцессорный контроллер по прерыванию, а однобитный выход схемы соединен с однобитным входом прерывания микропроцессорного контроллера, код угла эталонного цифрового датчика угла поступает на вход последовательного интерфейса микропроцессорного контроллера.
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2010 |
|
RU2435296C1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1644380A1 |
| Функциональный преобразователь угла поворота вала в код | 1984 |
|
SU1218465A1 |
| US 8004434 B2, 23.08.2011 | |||
| US 7538700 B2, 26.05.2009 | |||
| JP 2000283750 A, 13.10.2000 | |||

