Изобретение относится к транспорту и может быть применено в конструкциях модульных гибридных автомобилей, электромобилей, а также комбинированных дорожно-воздушных транспортных машин.
Известно транспортное средство, содержащее сочлененные между собой в единый управляемый комплекс тяговый и энергетический модули с возможностью поворота относительно друг друга в вертикальном направлении.
Недостатком данного средства являются ограничения в условиях его движения вне автомобильных дорог, а также неудобства движения, испытываемое водителем в условиях городов с интенсивным автомобильным движением и частыми длительными транспортными заторами, трудности движения с прицепным модулем в условиях горной местности.
Задача изобретения состоит в расширении технических возможностей средства по преодолению городских преград и на местности.
Поставленная задача достигается тем, что в транспортном средстве, содержащем сочлененные между собой в единый управляемый комплекс тяговый и энергетический модули с тяговым электроприводом колес от электросиловой установки прицепного энергетического модуля, имеется подъемно-опускающее устройство складывания модулей.
Тяговый модуль также оборудован электроприводом с тяговым электродвигателем и редуктором привода передней пары ведущих колес тягового модуля, причем его задние ведомые колеса снабжены устройствами рекуперации энергии колес при их торможении с накоплением ее в емкостных накопителях энергетического модуля.
Тяговый модуль в транспортном средстве, кроме того, оборудован электроприводом с тяговыми электродвигателями и редукторами привода левого и правого передних ведущих колес тягового модуля транспортного средства, а его задние ведомые колеса снабжены устройствами рекуперации энергии колес при их торможении с накоплением ее в емкостных накопителях энергетического модуля.
Тяговый модуль транспортного средства также оборудован электроприводом с тяговым электродвигателем и редуктором привода задней пары ведущих колес тягового модуля, причем его передние ведомые колеса снабжены устройствами рекуперации энергии колес при их торможении с накоплением ее в емкостных накопителях энергетического модуля.
Также тяговый модуль транспортного средства оборудуется электроприводом с тяговыми электродвигателями и редукторами привода левого и правого задних ведущих колес тягового модуля транспортного средства, а его передние колеса рекупирируют энергию в емкостные накопители энергетического модуля.
Соединяемый с тяговым энергетический модуль также оборудован многоколесной платформой с устройствами рекуперации энергии колес при их торможении и с накоплением ее в емкостных накопителях энергии.
Транспортное средство дополнительно снабжено тянущим воздушным винтом, расположенным на тяговом модуле и работающим от тягового электропривода транспортного средства.
Тянущий воздушный винт может быть выполнен соосным с вращающимися от тягового электропривода в противоположные стороны с одинаковой частотой двумя воздушными винтами.
Транспортное средство также дополнительно оборудовано съемным несущим модулем воздушно-транспортного движения, прикрепляемым к транспортному средству и включающим: управляемые несущий и рулевые воздушные винты с их автономными электроприводами и электроснабжением от электросиловой установки энергетического модуля, при этом тяговый модуль в воздушно-транспортном положении функционирует в форме фюзеляжа, энергетический модуль в форме силовой установки, колесная подвеска в форме шасси, а прикрепленный к ним съемный несущий модуль в форме управляемой несуще-рулевой установки.
Съемный несущий модуль транспортного средства может быть выполнен с соосными вращающимися от электросиловой установки энергетического модуля в противоположные стороны с одинаковой частотой двумя несущими воздушными винтами.
Несущие винты съемного несущего модуля в воздушно-транспортном положении выполнены работающими во взаимосвязи с тянущими воздушными винтами тягового модуля, составляя при этом комбинированный движитель транспортного средства.
Съемный несущий модуль транспортного средства может также включать два несущих винта, устанавливаемых вдоль транспортного средства на концах тягового и энергетического модулей на разной высоте и вращающихся с одинаковой частотой в противоположные стороны от электросиловой электроустановки энергетического модуля, при этом тяговый и энергетический модули могут жестко скрепляться в предполетном состоянии в полетный фюзеляжный блок транспортного средства.
Съемный несущий модуль транспортного средства может быть оборудован дифференциальным винтом, включающим дополнительные тянущие воздушные винты с их индивидуальным электроприводом и несущий винт, приводимый во вращение тянущими воздушными винтами, закрепленными на концах лопастей несущего винта по направлению их вращения.
Дифференциальный винт может также включать несущий винт с собственным электроприводом, связанным с электросиловой установкой энергетического модуля.
В транспортном средстве его винт может быть оборудован составными секционными лопастями, скрепляемыми в рабочее положение для воздушного движения транспортного средства.
Транспортное средство также может быть оборудовано различными подъемно-опускающими механизмами складывания модулей (домкратным, тросо-лебедочным, гидравлическим).
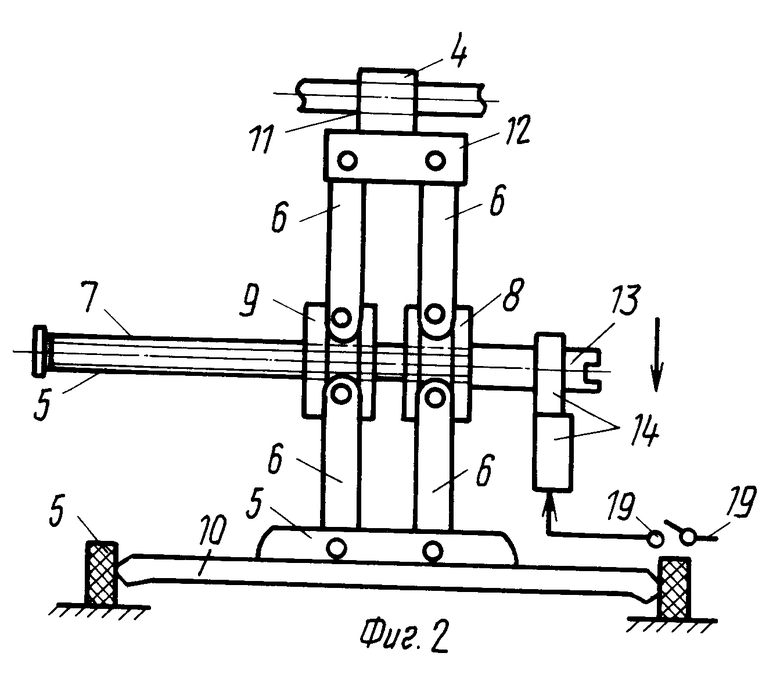
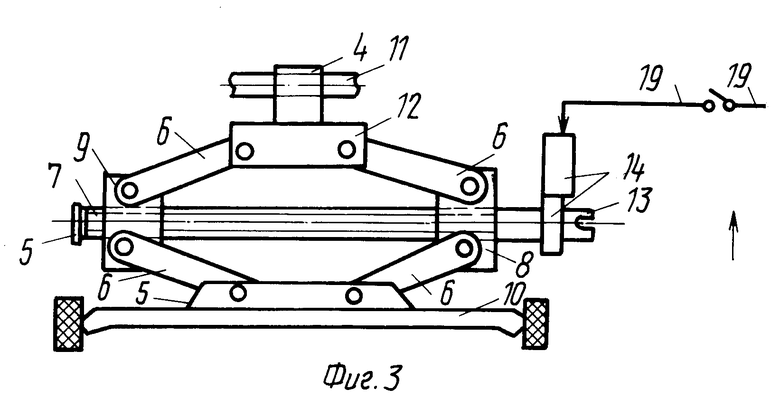
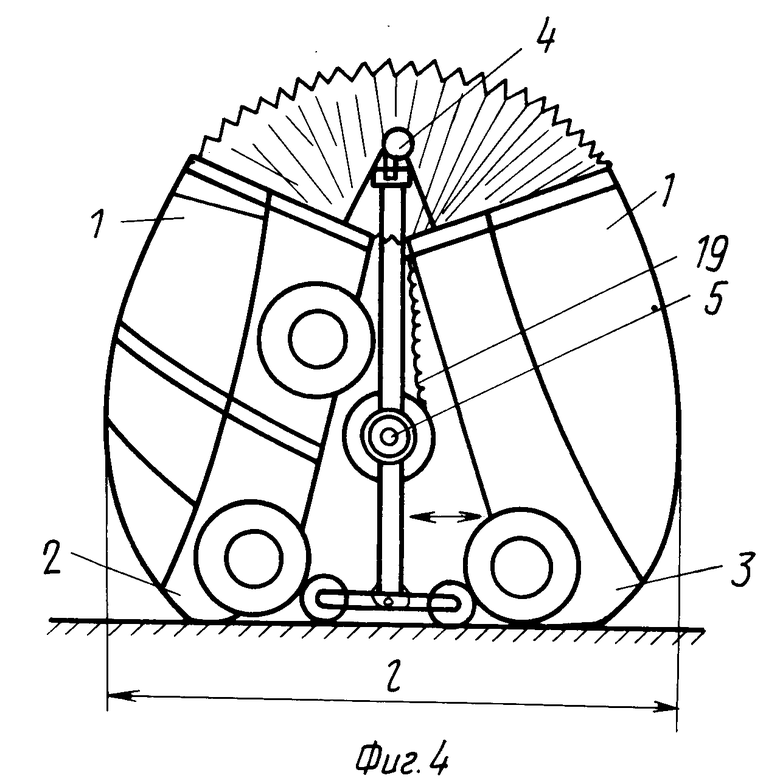
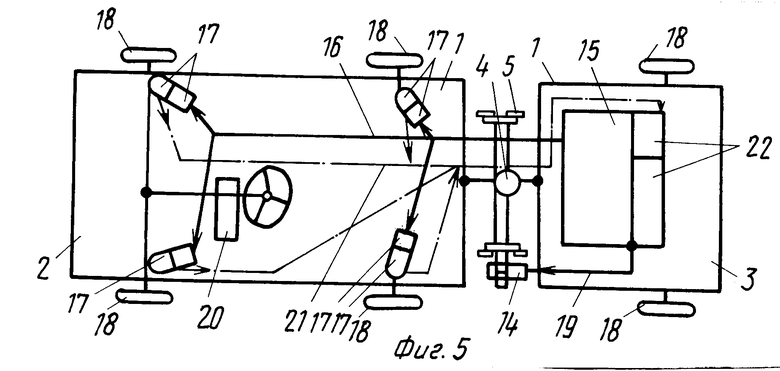
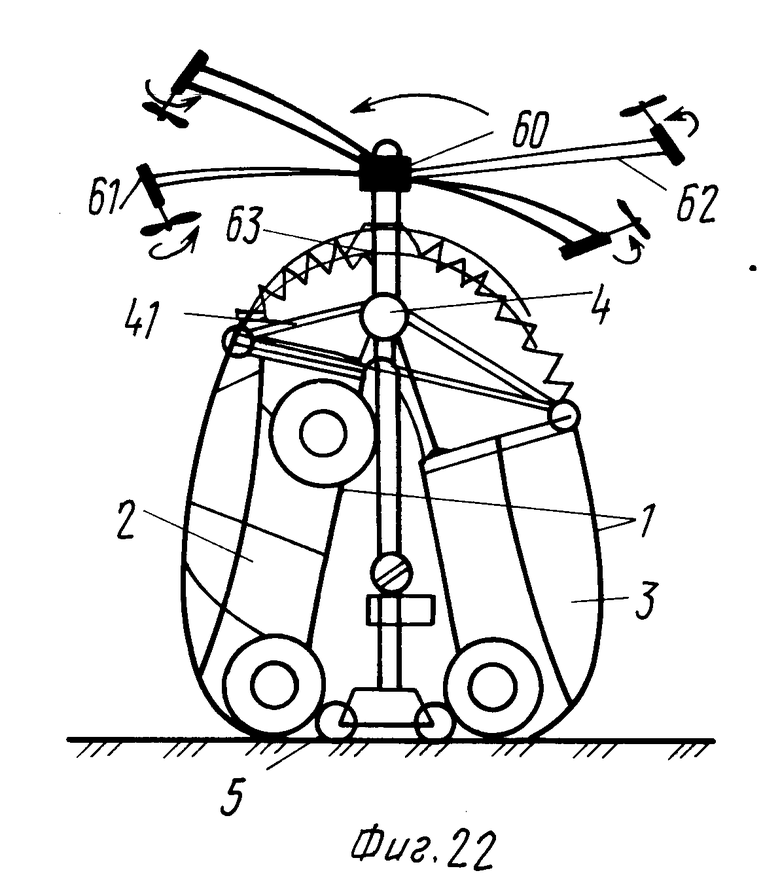
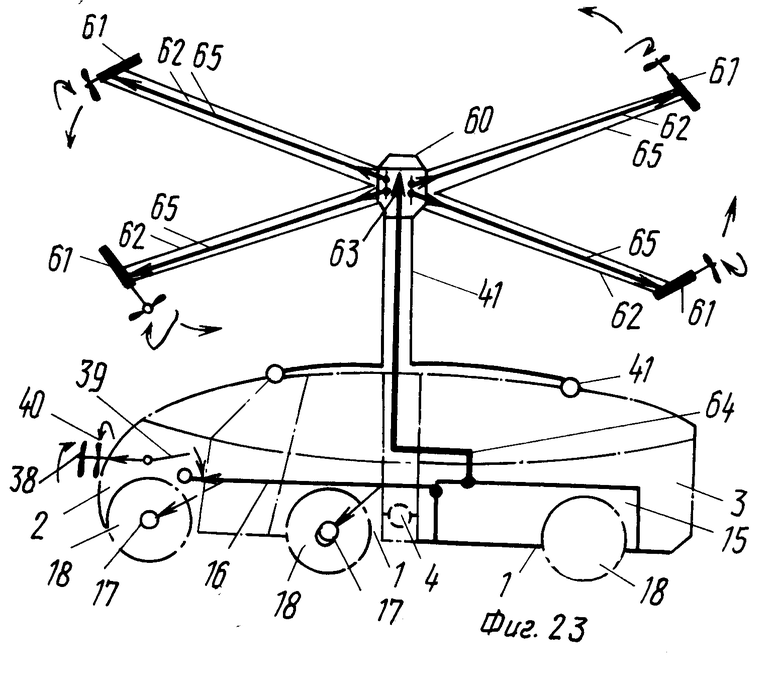
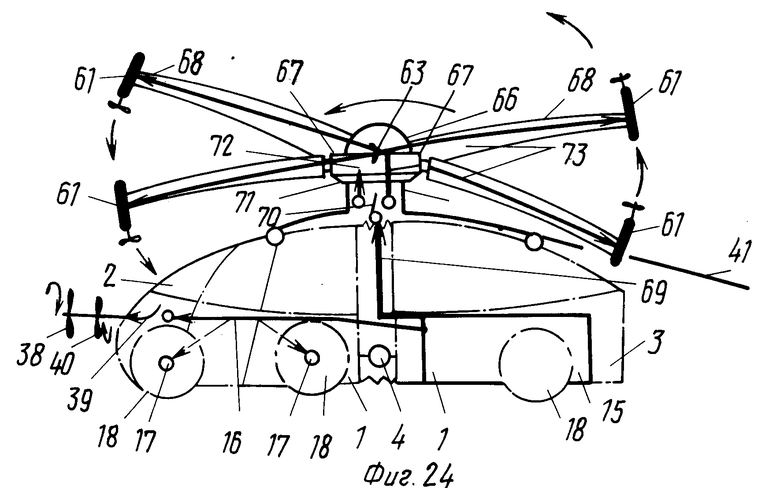
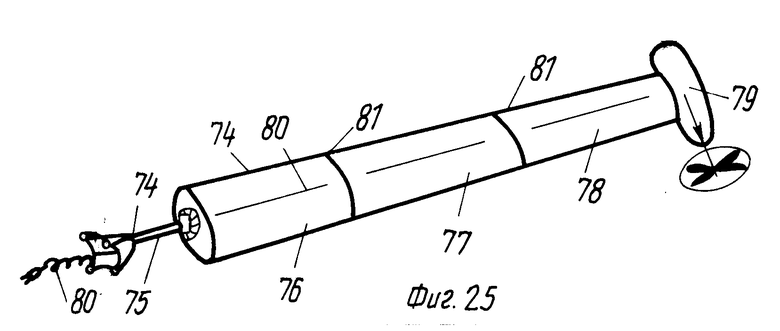
На фиг. 1 представлен общий вид модульного транспортного средства с подъемно-опускающим механизмом в транспортном положении; на фиг. 2 общий вид домкратного подъемно-опускающего механизма в рабочем состоянии при поднятых модулях транспортного средства; на фиг. 3 то же, в нерабочем состоянии в условиях дорожного движения; на фиг. 4 общий вид модульного транспортного средства с домкратным подъемно-опускающим механизмом при парковке; на фиг. 5 схема тягового электропривода транспортного средства; на фиг. 6 схема тягового электропривода передней пары ведущих колес транспортного средства; на фиг. 7 схема тягового электропривода левого и правого передних ведущих колес транспортного средства; на фиг. 8 схема тягового электропривода задней пары ведущих колес; на фиг. 9 схема тягового электропривода левого и правого задних ведущих колес транспортного средства; на фиг. 10 общий вид транспортного средства с многоколесной платформой энергетического модуля в дорожно-транспортном положении; на фиг. 11 схема тягового электропривода транспортного средства с многоколесной платформой энергетического модуля; на фиг. 12 общий вид транспортного средства с многоколесной платформой энергетического модуля при парковке; на фиг. 13 схема тягового электропривода транспортного средства с комбинированным колесно-винтовым движителем; на фиг. 14 то же, с соосным винтом; на фиг. 15 общий вид транспортного средства со съемным несущим модулем в предполетном, полетном и посадочном состояниях; на фиг. 16 схема электропривода съемного несущего модуля транспортного средства; на фиг. 17 схема электропривода транспортного средства с соосными несущими винтами; на фиг. 18 общий вид транспортного средства с несущим движителем в полете; на фиг. 19 схема электропривода транспортного средства с несуще-тянущим движителем; на фиг. 20 общий вид транспортного средства с двумя несущими воздушными винтами продольного расположения; на фиг. 21 схема электропривода транспортного средства с двумя воздушными винтами; на фиг. 22 общий вид транспортного средства с дифференциальным винтом; на фиг. 23 схема электропривода дифференциального винта съемного несущего модуля транспортного средства; на фиг. 24 схема электропривода комбинированного дифференциального винта съемного несущего модуля транспортного средства; на фиг. 25 общий вид составного винта съемного несущего модуля транспортного средства; на фиг. 26 схема тросо-лебедочного подъемно-опускающего механизма складывания транспортного средства; на фиг. 27 схема гидравлического подъемно-опускающего механизма складывания тягового и энергетического модулей.
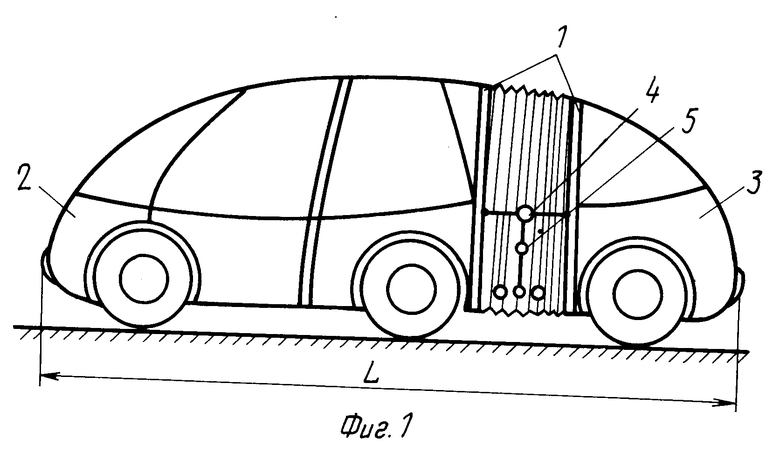
Транспортное средство 1 содержит тяговый 2 и энергетический 3 модули, сочлененные между собой сцепным устройством 4 в единый управляемый комплекс, тяговый электропривод колес от электросиловой установки прицепного энергетического модуля 3.
Транспортное средство 1 снабжено домкратным подъемно-опускающим механизмом 5 складывания модулей 2 и 3, располагаемым путем его крепления в местах сочленения этих модулей. Механизм 5 служит для подъема вверх соединяемых частей модулей 2 и 3, уменьшая при этом общую габаритную длину L транспортного средства 1 при парковке.
Домкратный подъемно-опускающий механизм 5 транспортного средства 1 состоит, например, из системы рычагов 6, винта 7, неподвижной 8 и подвижной 9 гаек, катковой опорной пяты 10, прикрепляемой в сцепному устройству 4 пальцем 11 струбцины, домкрата 12, приводной муфты 13 на винте 7, вращение которой может осуществляться как вручную любыми воротком, так и от мотор-редуктора 14 привода винта 7, связанного с электросиловой установкой 15 тягового электропривода.
Посредством линии 16 тягового электроснабжения, мотор-редукторов 17 привода колес 18 тягового модуля 2 транспортного средства осуществляется движение транспортного средства. Электропривод домкратного устройства осуществляется, например, от дополнительной линии 19 электроснабжения, а управление производится от пульта системы 20 управления, расположенной в тяговом модуле 2.
Транспортное средство 1 (фиг. 1) приводится в движение путем вращения его колес 18 тягового модуля 2 с использованием тягового электропривода этих колес.
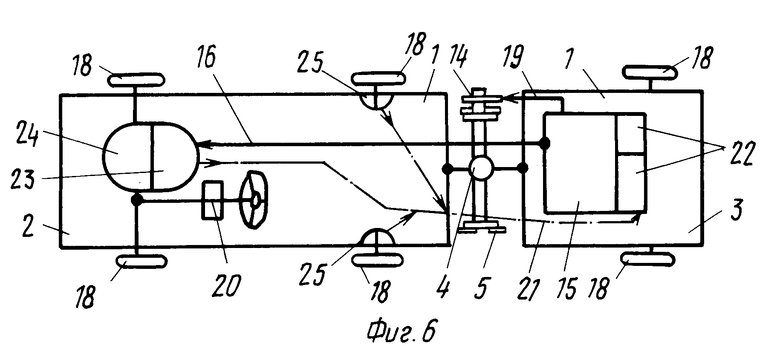
При включении движения транспортного средства 1 электроэнергия от силовой установки 15 энергетического модуля 3 по линии тягового электроснабжения 16 подается к мотор-редукторам 17 привода колес 18 тягового модуля 2, которые вращают все четыре ведущих колеса 18, осуществляя движение транспортного средства, а при торможении колес энергия рекуперируется электролинией 21. Тяговый модуль 2 транспортного средства также может оборудоваться и электроприводом с передней парой ведущих колес, состоящих из одного тягового электродвигателя 23 с его редуктором 24 для привода передней пары ведущих колес 18 транспортного средства, при этом задние ведомые колеса 18 тягового модуля 2 снабжены известными устройствами рекуперации энергии колес 25 при их торможении для ее накопления в емкостных накопителях энергии 22 (аккумуляторах и конденсаторах) электросиловой установки 15 энергетического модуля 3 и использования рекуперированной электроэнергии в энергетическом балансе транспортного средства для его движения.
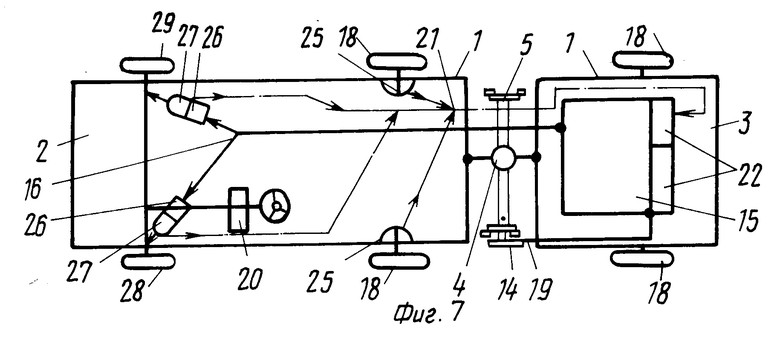
В транспортном средстве 1 его тяговый модуль 2 может быть оборудован электроприводом с тяговыми электродвигателями 26 с редукторами 27 (мотор-редукторами) привода передних левого 28 и правого 29 ведущих колес тягового модуля 2 транспортного средства, а задние колеса 18 этого модуля снабжены известными устройствами 25 рекуперации энергии колес 18 при их торможении с накоплением энергии в емкостных накопителях 22 энергии электросиловой установки 15 энергетического модуля 3.
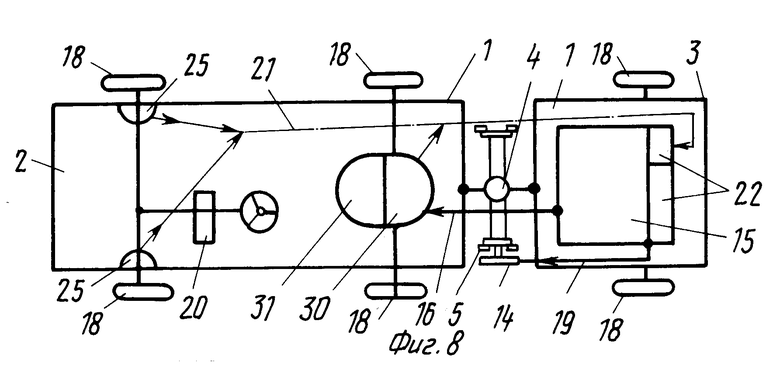
Также в транспортном средстве 1 его тяговый модуль 2 может быть оборудован электроприводом с одним тяговым электроприводом 30 и его редуктором 31 привода задней пары ведущих колес тягового модуля 2, причем его ведомые передние колеса 18 снабжены устройствами 25 рекуперации энергии колес при их торможении с накоплением ее в емкостных накопителях энергии 22 электросиловой установки 15 энергетического модуля 3.
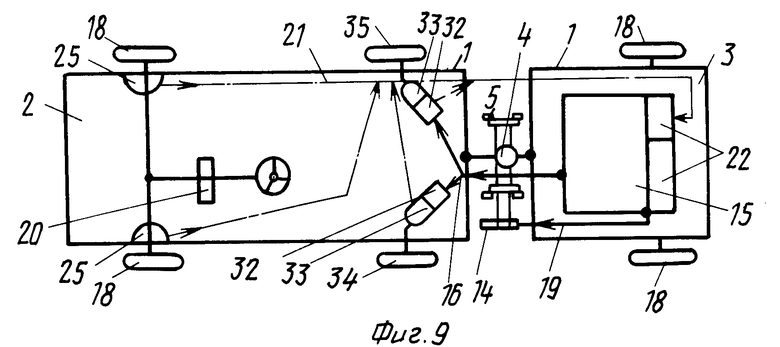
В транспортном средстве 1 его тяговый модуль 2 может быть оборудован электроприводом с тяговыми электродвигателями 32 и редукторами 33 привода левого 34 и правого 35 задних ведущих колес тягового модуля 2 транспортного средства, а его передние ведомые колеса 18 рекуперируют энергию по электролинии 21 в емкостные накопители 22 электросиловой установки 15 энергетического модуля 3.
Принцип работы транспортного средства 1 с их тяговыми устройствами, схематически показанные на фиг. 6-9, аналогичны описанному выше в схеме на фиг. 1-5 и отличаются лишь количественным и конструктивным изменением привода ведущих колес тягового модуля 2 для качественных изменений в части рационального устройства транспортного средства 1.
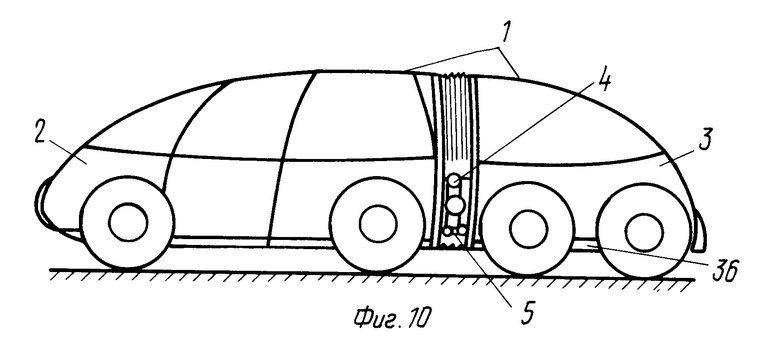
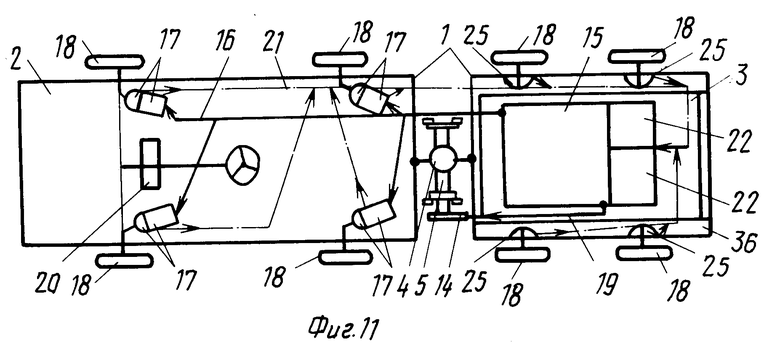
Соединяемый с тяговым 2 энергетический модуль 3 транспортного средства 1 может быть оборудован многоколесной платформой 36 с известными устройствами рекуперации энергии 25 всех колес 18 платформы модуля 3 при их торможении с накоплением энергии в емкостных накопителях 22 электросиловой установки 15 энергетического модуля 3 (фиг. 11).
Электропривод этого транспортного средства осуществляется аналогично электроприводу на фиг. 5 и отображен на схеме фиг. 11.
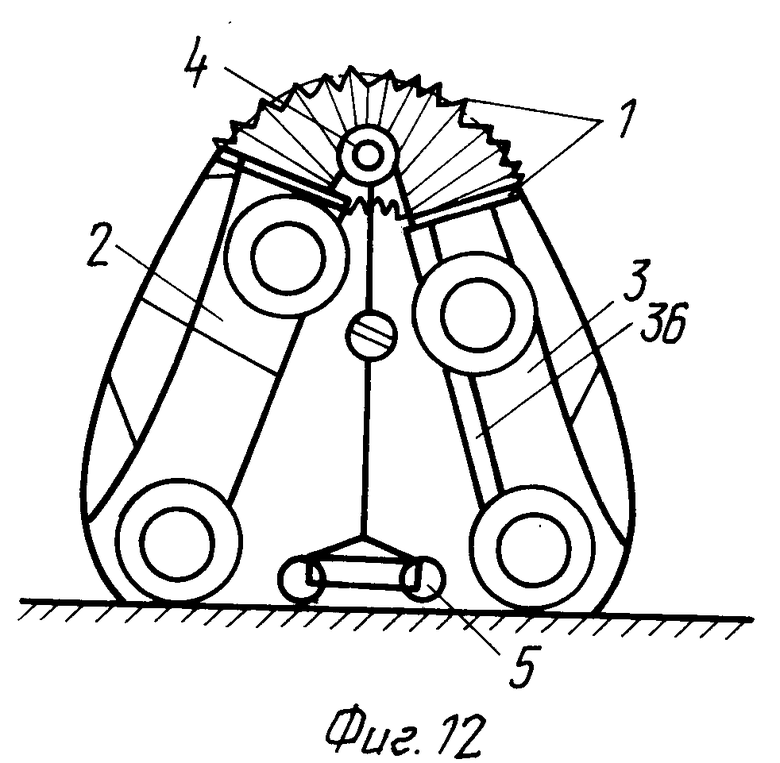
Общий вид транспортного средства 1 с многоколесным энергетическим модулем 3 при движении показан на фиг. 10, а при парковке на фиг. 12. Здесь подъем, складывание и опускание тягового 2 и многоколесного энергетического 3 модулей транспортного средства 1 осуществляется посредством подъемно-опускающего устройства 5 также, как и описано выше (фиг. 1).
Транспортное средство 1 с многоколесной платформой 36 энергетического модуля 3 повышает грузоподъемность этого модуля и применимо для транспортных средств, имеющих значительную массо-габаритную электросиловую установку, например, электросиловая установка модельного электромобиля, имеющего блок аккумуляторных батарей (и конденсаторных) массой 700 кг и выше.
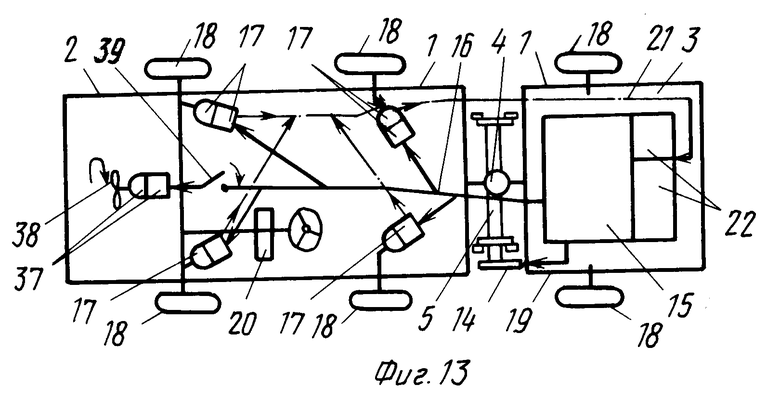
Для улучшения тягово-скоростных свойств транспортного средства 1 оно дополнительно снабжается тянущим воздушным винтом 38, расположенным на тяговом модуле 2 и работающим от тягового электропривода колес транспортного средства при его движении, образовывая при этом комбинированный колесно-винтовой движитель транспортного средства.
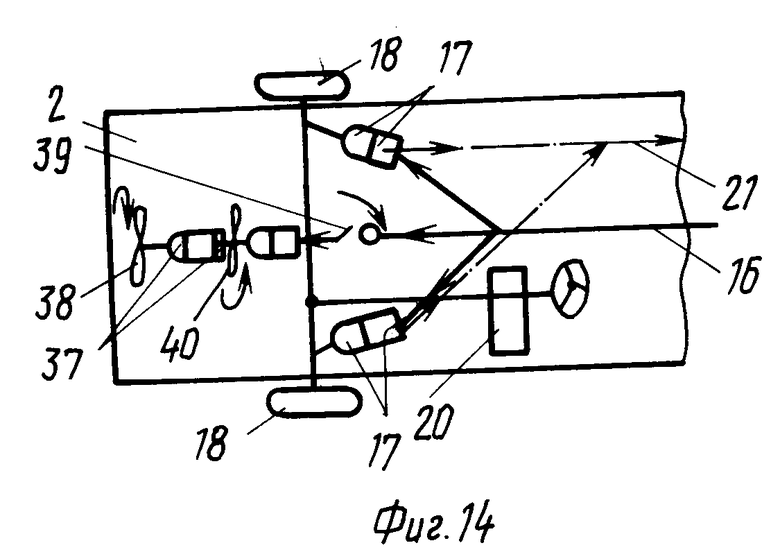
Тянущий воздушный винт 38 транспортного средства приводится во вращение от мотор-редуктора 37 и включается (выключатель 39) для увеличения тяги и скорости движения транспортного средства. Частота вращения винта 38 при его включении с пульта управления 20 транспортного средства 1 взаимоувязывается с частотой вращения ведущих колес 18 электрической схемой. При необходимости создания значительно большой тяги тянущий воздушный винт 38 в тяговом модуле 2 транспортного средства 1 выполняется соосным с вращающимися от мотор-редуктора винта при его включении с тяговый электропривод в противоположные стороны с одинаковой частотой двумя воздушными винтами 38 и 40.
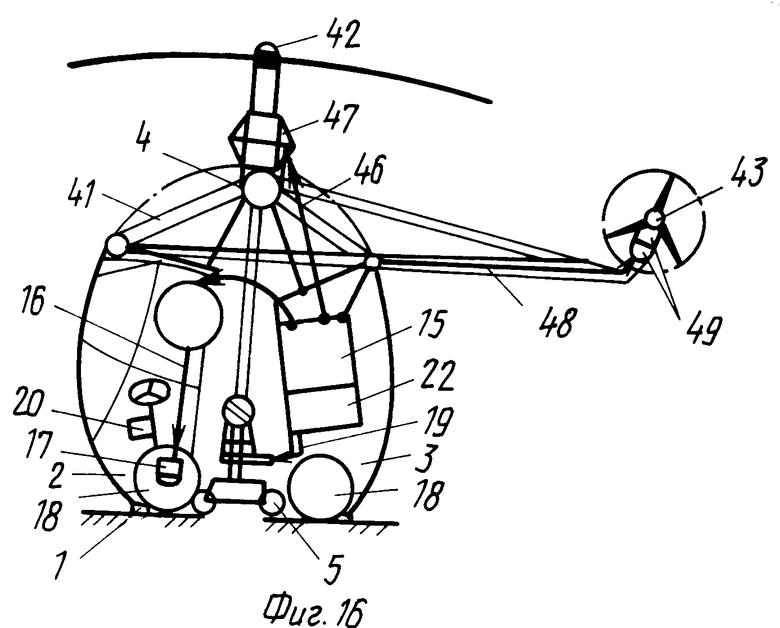
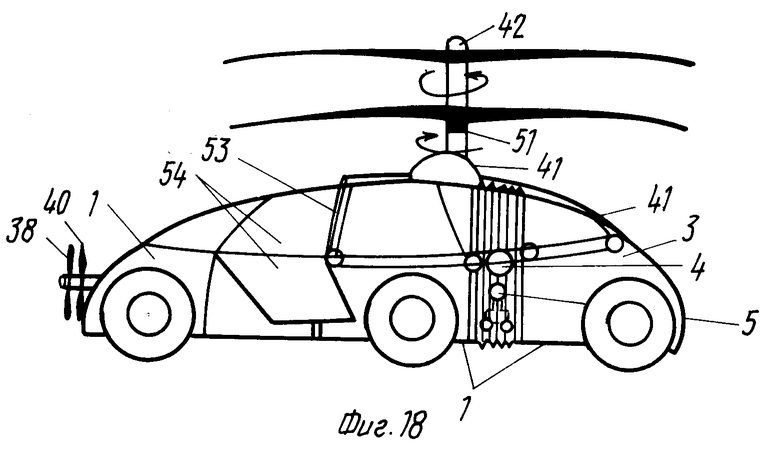
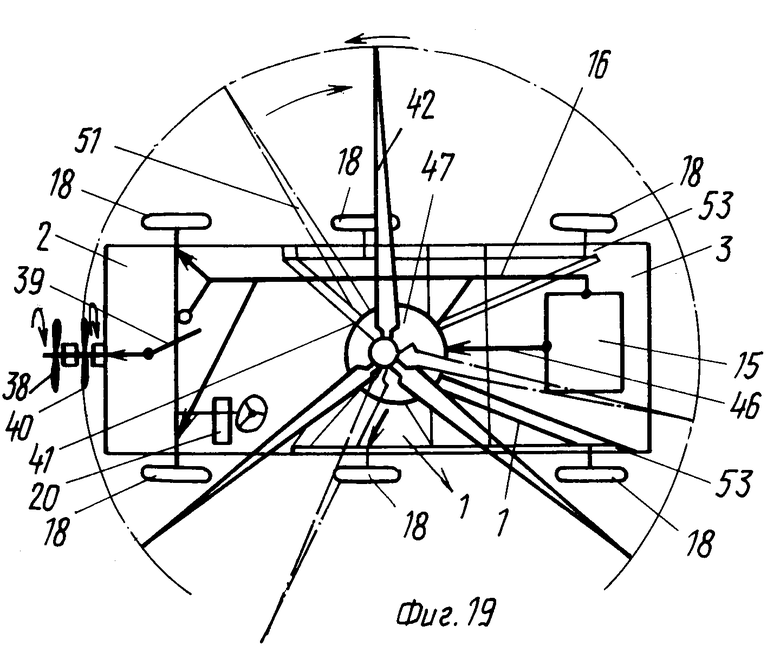
Транспортное средство 1 с тяговым 2 и энергетическим 3 модулями дополнительно оборудуется съемным несущим модулем 41 воздушно-транспортного движения, прикрепляемым к транспортному средству 1 для его полета и включающему: управляемый несущий 42 и рулевой 43 воздушные винты с из автономными электроприводами и электроснабжением от электросиловой установки 15 энергетического модуля 3, при этом тяговый модуль 2 в воздушно-транспортном положении функционирует в форме фюзеляжа, энергетический модуль 3 в форме силовой установки, передние и задние колеса 18 транспортного средства в форме шасси, а прикрепляемый к ним съемный несущий модуль 41 в форме воздушного несуще-рулевой установки воздушного транспортного средства. Несущий 42 и рулевой 43 винты съемного несущего модуля 41 транспортного средства 1 состоит из лопастей 44 и 45 и приводятся во вращение от автономных электроприводов несущего 42 и рулевого 43 винтов. Несущий винт 42 в съемном несущем модуле 41 служит для создания подъемной силы и тяги поступательного движения транспортному средству 1 при его полете.
Рулевой винт 43 в съемном несущем модуле 41 предназначен для уравновешивания реактивного момента несущего винта 42 при его вращении и путевого управления транспортным средством 1 при его полете. Путем автономного несущего электропривода, состоящего из линии электроснабжения 46 от электросиловой установки 15, электродвигателя с редуктором 47 несущий винт 42 приводится во вращение, что создает при этом подъемную и тяговую силы по вертолетному типу транспортному средству 1 для его воздушно-транспортного движения.
Одновременно автономный рулевой электропривод, состоящий из линии рулевого электроснабжения 48 от электросиловой установки 15, электродвигателя с редуктором рулевого винта 49 приводит во вращение рулевой винт 43, который, вращаясь, создает тягу, которая уравновешивает реактивный момент, возникающий при работе несущего винта 42 в одновинтовом несущем модуле 41 транспортного средства 1.
Передние колеса 18 тягового модуля 2 и задние колеса колеса прицепного энергетического модуля 3 транспортного средства 1 в положении воздушно-транспортного движения (фиг. 15) служат для в качестве неубирающегося шасси этого средства при его взлете полете и посадке.
Для полета пассажиры и пилот размещаются в кузове тягового модуля 2 (фиг. 15), выполняющего в транспортном полете функции фюзеляжа летательного аппарата, причем кресла 50 пилота и пассажиров выставляются в горизонтальное положение для удобства в полете.
Перед полетом транспортное средство (фиг. 1) переводится в парковочное положение (фиг. 4), затем на нем крепится съемный несущий модуль 41 с несущий модуль 41 с несущим 42 и рулевым 43 воздушными винтами (фиг. 15), которые подсоединяются к своим линиям электроснабжения от электросиловой установки энергетического модуля 3, и после включения электросиловой установки 15 и запуска винтов 42 и 43 несущего модуля 11 транспортное средство следует по установленному маршруту.
Управление транспортным средством 1 при взлете, воздушном движении и посадке осуществляется пилотом с пульта управления общей системы 20 управления этим средством и предусматривает также управление несущим 42 и рулевым 43 винтами, электросиловой установкой 15 данного транспортного средства (фиг. 16).
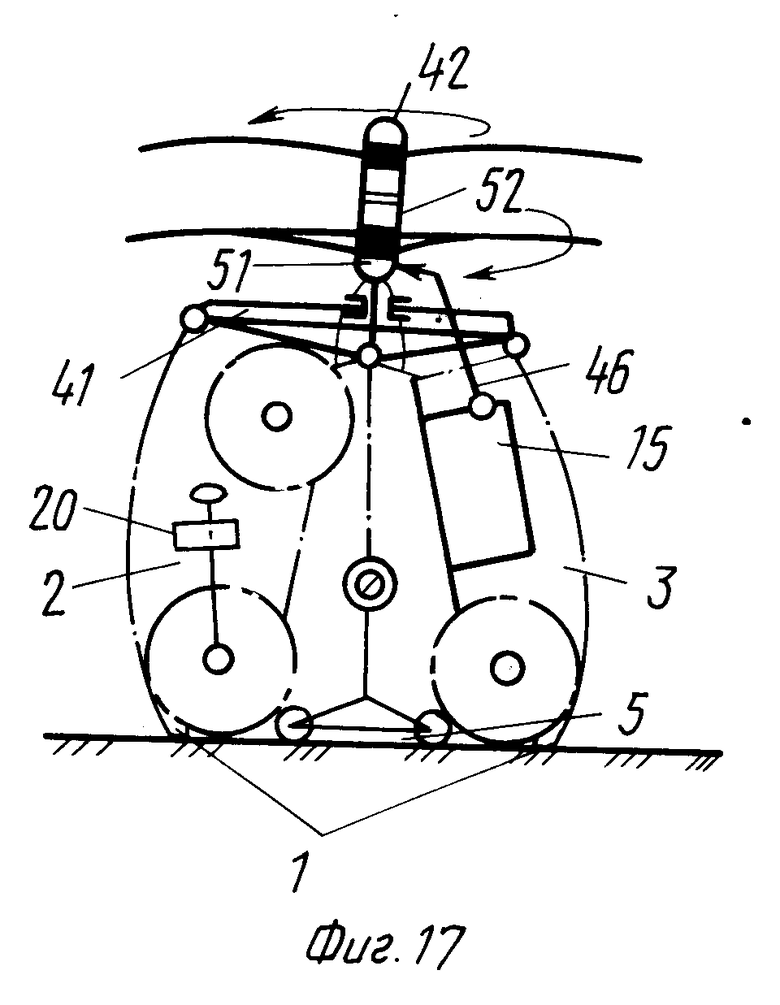
Съемный несущий модуль 41 транспортного средства 1 выполняется как вариант с соосными вращающимися в противоположные стороны с одинаковой частотой от электросиловой установки 15 энергетического модуля 3 двумя несущими воздушными винтами 42 и 51.
В данной схеме вертолетного типа несущие винты 42 и 51 располагаются один над другим и имеют геометрические размеры, формы лопастей и другие параметры одинаковые. Их реактивные моменты при вращении вследствие вышеизложенного уравновешиваются.
Несущие воздушные винты 42 и 51 соосной схемы приводятся во вращение мотор-редуктором 52, состоящим из электродвигателя и редуктора, вращающего соосные винты 42 и 51 в разные стороны с одинаковой частотой.
Электроэнергия к электромотору мотор-редуктора 52 подается линией электроснабжения 46 от электросиловой установки 15. Принцип действия транспортного средства 1 с двухвинтовой соосной схемой при взлете, полете, посадке и дорожном движении аналогичен описанному выше для одновинтовой схемы транспортного средства, снабженного одним винтом. Транспортное средство 1 с одновинтовой схемой с рулевым винтом и двухвинтовой соосной схемой с несущим моделей 41 выполнено таким образом, что его несущие винты 42 и 51 работают во взаимосвязи с тянущими воздушными винтами 38 и 40, составляя при этом комбинированный несуще-тянущий движитель транспортного средства 1 при его полете.
При подготовке к полету транспортное средство 1, находящееся в дорожно-транспортном положении, оборудуется следующим образом: несущий модуль 41 подключают его к электросиловой установке 15 энергетического модуля 3, который жестко скрепляют элементами 53 с тяговым модулем 2. Комбинированный несущий-тянущий движитель транспортного средства имеет электрический привод и состоит из описанного выше несущего и тянущего электроприводов от общей электросиловой установки 15, которые могут работать как в отдельности при автономном режиме и во взаимосвязи, осуществляемой системой 20 управления транспортного средства. Причем в период работы этих электроприводов тяговый электропривод колес тягового модуля обычно отключается.
Для осуществления полета транспортного средства 1 запускаются его винты 42 и 51 (или 42 и 43) при одновинтовой схеме, которые, вращаясь за счет подъемной силы, создаваемой несущим 42 винтом (или винтами 42 и 51), вертикально поднимают скрепленные в единый комплекс транспортного средства модули 2, 3 и 41, затем могут включаться с пульта системы 20 управления 20 тянущий винт 38 (винты 38 и 40 при соосной схеме) для дальнейшего полета и перемещения средства 21 в горизонтальной или наклонной плоскости за счет результирующей силы воздушной тяги, создаваемой подъемной вертикальной силой тянущего винтов. Также для полета на тяговом модуле 2 фюзеляже могут быть применены, например, крылья 54 в виде закрепляемой верхней или нижней половины боковых дверей тягового модуля 2.
После посадки транспортного средства 1 и остановки его винтов 42 и 51 отсоединяются и снимаются несущий 41 модуль и элементы 53, скрепляющие модули 2 и 3 (в том числе и крылья 54 при их наличии), которые укладываются в грузовой отсек энергетического модуля 3, подготавливая таким образом средство 1 для дорожного движения.
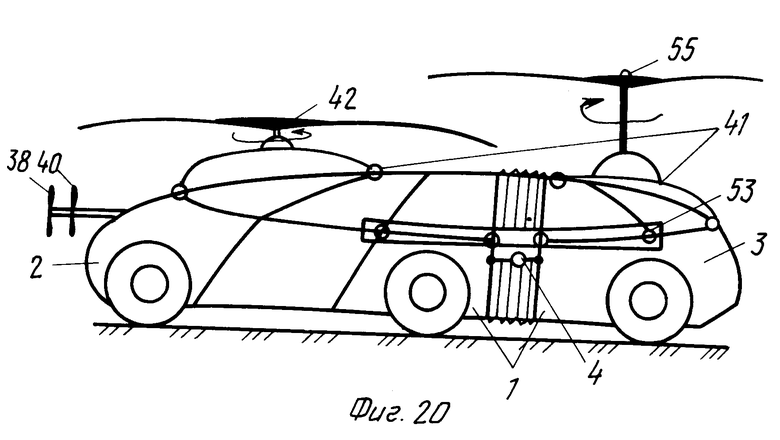
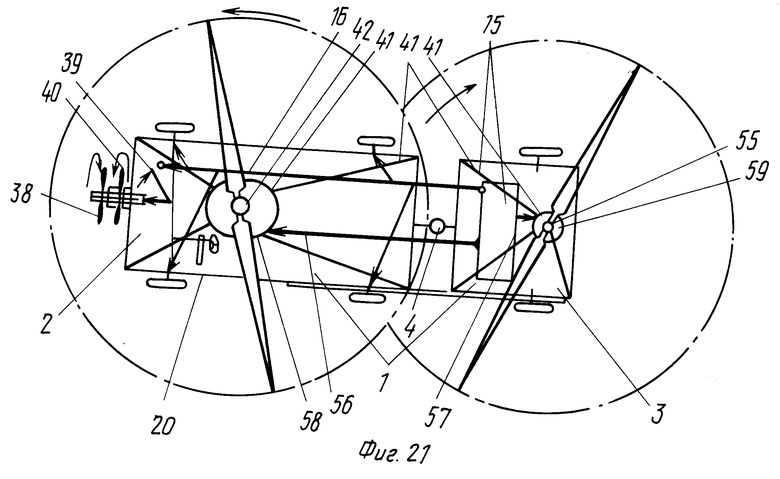
В представленном на фиг. 20 транспортном средстве 1 с размещенным на нем для полета несущим модулем 41 последний включает в себя два несущих винта 42 и 55, устанавливаемых вдоль транспортного средства 1 на концах тягового 2 и энергетического 3 модулей на разной высоте и вращающихся с одинаковой частотой в противоположные стороны (указан стрелками) от электросиловой установки 15 энергетического модуля 3, при этом тяговый модуль 2 и энергетический 3 могут жестко скрепляться элементами 53 в предполетном состоянии в полетный фюзеляжный блок транспортного средства 1 в виде фюзеляжно-силовой установки воздушно-транспортного средства.
В связи с тем, что несущие винты 42 и 55 вращаются в противоположные стороны с одинаковой частотой их реактивные моменты взаимно уравновешиваются, причем эти винты 42 и 55 желательно располагать на разной высоте, чтобы избежать их взаимного влияния.
Привод винтов 42 (тягового модуля 2) и 55 (энергетического модуля 3) несущего модуля 42 осуществляется электроприводами от электросиловой установки 15, состоящим из линии 56 и 57 электроснабжения и мотор-редуктора 58, электромоторов-редуктора 59 несущих винтов 42 и соответственно 55, которые управляются так же, как и электропривод тянущего воздушного винта 38 (или 38 и 40) с пульта системы 20 управления.
Электропривод с двумя несущими винтами может работать как в самостоятельном режиме при полете, так и взаимоувязанном с тянущим электроприводом 16 тягового модуля 2. При переходе с дорожного режима работы транспортного средства 1 на полетный его тяговый 2 и энергетический 3 модули скрепляют элементами 53, после чего крепят несущий 41 модуль с двумя винтами к модулям 2 и 3 и подключают его электропривод к электросиловой установке 15 энергетического модуля 3. Это транспортное средство обладает более надежной устойчивостью в виде наличия продольной двухвинтовой схемы построения. В транспортном средстве 1 его несущий модуль 41 оборудован дифференциальным винтом 60, включающем дополнительные тянущие воздушные винты 61 и несущий винт 62, приводимый во вращение винтами 61, закрепленными на концах лопастей несущего винта 62, по направлению вращения.
Дополнительные тянущие воздушные винты 61 состоят из тянущих винтов 38 и 40 и электродвигателей для их привода и имеют индивидуальный электропривод от распределительного электроузла 63, при этом электропроводка 65 расположена внутри вращающихся лопастей 62 винта 60. Подводка электроэнергии к узлу 63 осуществляется по линии 64 электроснабжения от электросиловой установки 15 энергетического модуля 3.
При подаче электроэнергии на тянущие винты 61 последние, вращаясь, создают тянущие усилия на концах лопастей 62 несущего винта, который, вращаясь, осуществляет подъем транспортного средства 1. Особенность этой схемы является то, что крутящийся момент создается непосредственно на несущем винте, свободно вращающимся над транспортным средством 1. В этом случае реактивный момент на транспортное средство 1 не передается, что упрощает конструкцию для условий полета.
Несущий модуль 42 крепится к транспортному средству 1 при подготовке этого средства к полету, а также снимается после завершения полета и укладывается в грузовой отсек энергетического модуля 3 для дальнейшего дорожного движения транспортного средства.
В транспортном средстве 1 его несущий модуль 41 может быть оборудован комбинированным дифференциальным винтом 66, включающим несущий винт 67, лопасти 68 этого винта с выполненными на его концах дополнительными тянущими винтами 61, линии 69 электроснабжения от электросиловой установки 15 энергетического модуля 3 до контактного выключателя 70 комбинированного дифференциального винта 66, линии 71 электропривода мотор-редуктора 72 привода лопастей 68 несущего винта 67 электроузла-распределителя 63 коллекторного типа и линии 73 снабжения 73.
Комбинированный дифференциальный винт 66 позволяет получать крутящий момент и вертикальную тягу несущего винта по двум схемам, как по одновинтовой (или двухвинтовой соосной), так и по схеме с дифференциальным винтом 60. Винт 42 несущего модуля 41 транспортного средства 1 оборудуется также составными секционными лопастями 74, секции которого скрепляются в рабочее положение для полета транспортного средства и состоит из секционного лонжерона 75, содержащего, например, комлевую центральную 77 и концевые 78 части этого лонжерона. Здесь же имеются мотор-редуктор 79, линия 80 электроснабжения тянущих воздушных винтов. Для полета транспортного средства 1 составные лопасти 74 винта съемного несущего модуля 41 собираются из секций 76-78 путем, например, их скрепления в узлах 81 по боковым торцам с двух сторон комлевой 76 и концевой 78 лопастных секций с помощью находящихся внутри соединяемых частей лонжерона 75 в единый лонжерон, получая таким образом лопасти 74, которые крепятся к винту несущего модуля 41, устанавливаемого на транспортное средство.
После завершения полета и перехода транспортного средства 1 на режим дорожного движения лопасти 74 несущего винта отсоединяются и разбираются на его секции 76-78 и укладываются в грузовой отсек транспортного средства для его дорожного режима движения.
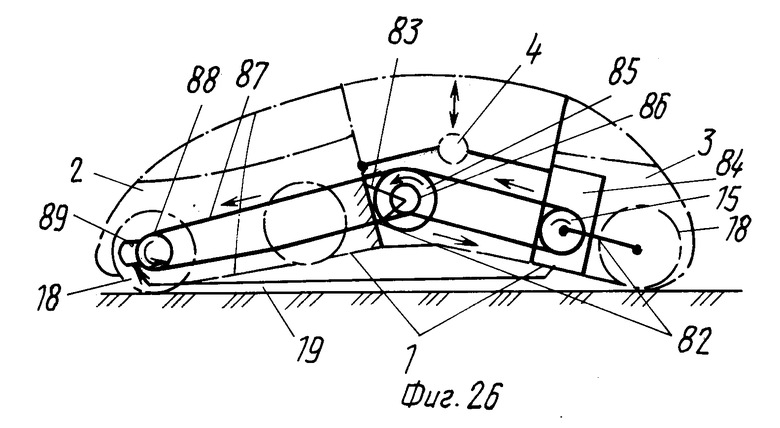
Устройство лопастей 74 из секций позволяет иметь транспортабельные в пределах габаритов дорожного транспортного средства 1 лопасти несущего винта. Транспортное средство 1 может также снабжаться тросо-лебедочным подъемно-опускающим устройством 82 складывания тягового 2 и энергетического 3 модулей. Данное устройство служит для уменьшения габаритной длины транспортного средства 1 при его парковке.
Тросо-лебедочный подъемно-опускающий механизм 82 состоит из дифференциального блока 83 с его подвижным блоком 84, прикрепляемым к раме энергетического модуля 3, а также его неподвижных спаренных на одной оси блоков 85 и 86, закрепляемых на раме (или, например, кузове) тягового модуля 2, троса 87, реверсивной лебедки 88 с приводом, например ручным или электрическим. При электрическом приводе лебедки 88 последняя снабжается мотор-редуктором 89 привода, состоящим из известных электродвигателя и редуктора, выходной вал которого сочленен с барабанной лебедкой.
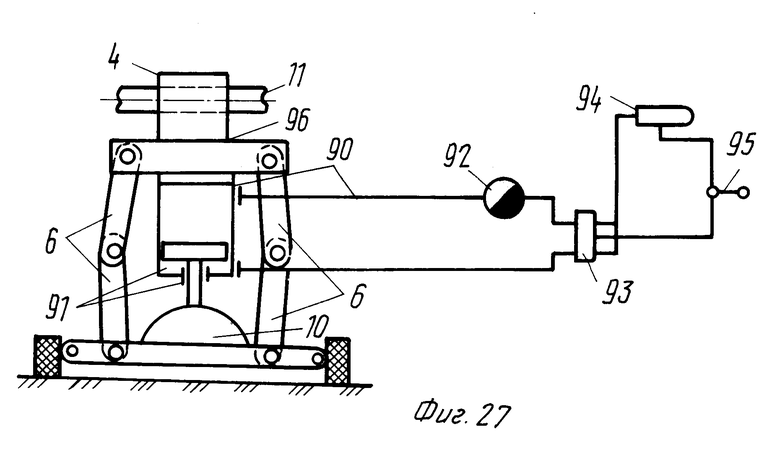
Транспортное средство 1 может снабжаться гидравлическим подъемно-опускающим механизмом 90 складывания тягового 2 и энергетического 3 модулей при парковке.
Устройство первоначально применимо в транспортных средствах оборудованных известными гидравлическими системами управления, например гидравлической тормозной системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬ | 1992 |
|
RU2048358C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПРОФИЛЬНЫХ КОНСТРУКЦИЙ | 1992 |
|
RU2044171C1 |
| ВИНТОКРЫЛ | 2017 |
|
RU2673754C2 |
| ЛЕКАРСТВЕННОЕ СРЕДСТВО | 1998 |
|
RU2146129C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| Воздушная транспортная система | 2021 |
|
RU2764036C1 |
Использование: относится к транспорту и может быть применимо в конструкциях автомобилей, электромобилей, а также комбинированных дорожно-воздушных транспортных машин. Сущность изобретения: транспортное средство 1 содержит соединенные между собой прицепной энергетический 3 и тяговый 2 модули, выполненные с возможностью поворота относительно друг друга в вертикальном направлении. Колеса 18 тягового модуля имеют электропривод. Транспортное средство снабжено тянущим воздушным винтом и имеет возможность установки съемного несущего модуля 41 для осуществления полета в воздухе. Модуль 41 имеет различные варианты установки воздушных тянущих и несущих винтов. 5 з. п. ф-лы, 27 ил.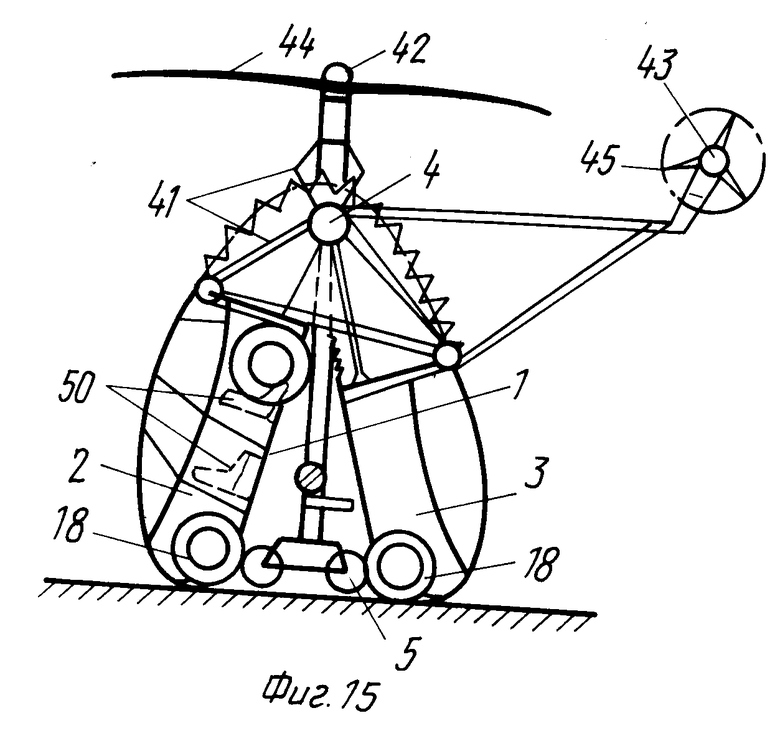
| Сочлененное транспортное средство | 1988 |
|
SU1556993A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
