Изобретение относится к области авиационной техники и касается создания скоростных винтокрылов двухвинтовой продольной схемы, имеющей несущие винты без автоматов перекоса, каждый из которых обеспечивает только вертикальную тягу и смонтирован на вертикальной опоре, установленной от главного редуктора до обтекателя высокорасположенного стреловидного крыла, образующего с нижним крылом обратной стреловидности биплан-тандем с передней и задней Х-образными конфигурациями в плане, но и многовинтовой движительной системой, включающей на концах нижних крыльев вентиляторы в кольцевых обтекателях, имеющих на выходе горизонтальные рули высоты, обеспечивающие управление по тангажу и крену.
Известен экспериментальный скоростной винтокрыл модели "Ка-22" ОКБ «Камова» (РФ), содержащий трапециевидное крыло, имеющее на его консолях движительно-несущие винтовые системы с двумя турбовинтовыми двигателями, связанными с главным редуктором соединительными валами, проложенными в крыле, и приводящими во вращение несущие винты и пропеллеры, расположенные соответственно спереди гондол двигателей и над последними на пилонах крыла, имеет вертикальное оперение с горизонтальным стабилизатором и трехопорное неубирающееся колесное шасси с носовой вспомогательной и боковыми главными опорами.
Признаки, совпадающие - на концах крыла умеренного удлинение λ=5,4 и размаха 23,8 м имеются пилоны с несущими винтами диаметром 22,5 м, вращающимися в противоположных направлениях. Каждый несущий винт, вал которого отклонен вперед по полету, имеет автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной и пропульсивной силы, а поступательное движение в скоростном полете обеспечивают в большей степени пропеллеры. Два турбовинтовых двигателя Д-25 ВК мощностью по 5500 л.с., используемых 95% их мощности при ВВП и ее меньшую часть при горизонтальном полете соответственно на привод несущих винтов (почти 15% при взлетном весе Gвз=42500 кг) при создании ими подъемной силы и пропульсивной тяги, но и пропеллеров АВ-62, расположенных спереди гондол двигателей, обеспечивающих горизонтальную тягу только при крейсерском полете, особенно, когда несущие винты станут вращаться на режиме близко к самовращению, как у автожира, создавая только подъемную силу при горизонтальном полете (авторотирующие несущие винты используются как несущие поверхности, не создавая пропульсивной тяги), а потребную при этом маршевую тягу для горизонтального полета будут создавать пропеллеры, что обеспечит винтокрылу более высокую экономичность, чем у вертолета, а высокая тяговооруженность его силовой установки, имеющая удельную нагрузку на мощность ρN=3,4 кг/л. с., может создавать диапазон скоростей полета 340…356 км/час с полезной нагрузкой (ПН) 6,0 тонн и после выполнения ВВП при взлетном его весе 37500 кг, обеспечивая при этом и дальность полета до 1100 км. Испытания Ка-22 показали, что при взлете с разбегом 190 м вес ПН взрастает до 10 тонн (при Gвз=42500 кг). При посадке «по-самолетному» (Gвз=35500 кг) посадочная дистанция менее 130 м. При скорости полета свыше 150 км/ч винтокрыл вел себя как самолет и крыло при этом несет 60% его взлетного веса.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания подъемной силы и горизонтальной тяги (несущие винты и пропеллеры), что неизбежно ведет к его утяжелению, особенно, с тянущими пропеллерами, используемыми лишь в горизонтальном полете, но и увеличению объема регламентных работ и удорожанию эксплуатации несущих винтов, имеющих автоматы перекоса с управлением общего и циклического изменения их шага и, как следствие, снижению весовой отдачи и дальности действия. Вторая - это то, что на режиме висения поток от несущих винтов, обдувая консоли «самолетного» крыла площадью 105,0 м2 и создавая значительную (почти 12,5%) общую потерю в их вертикальной тяге, затормаживается. При этом, скоростной воздушный поток, отбрасываемый от консолей крыла и даже при отклоненных закрылках и со средней аэродинамической хордой равной 3,9 м, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги несущих винтов и создавать ситуацию неуправляемого падения. Третья - это то, что в винтокрыле двухвинтовой поперечной схемы с движительно-несущей винтовой системой и двумя турбовинтовыми двигателями, смонтированными на концах высокорасположенного крыла соответственно в надкрыльевых пилонах и подкрыльных гондолах, предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой редуцирования несущих винтов и пропеллеров в общем редукторе и имеющее корневую хорду больше концевой, что увеличивает и индуктивные потери. Четвертая - это то, что для обеспечения прочности и жесткости крыла большого размаха, необходимо увеличивать строительную высоту крыла и площадь сечения силовых элементов, что приводит к значительному увеличению веса конструкции, увеличению лобового сопротивления и, как следствие, к снижению скорости и весовой отдачи. Пятая - это то, что расположение двух пропульсивных движителей под несущими винтами усложняет конструкции и приводит к увеличению ее габаритов и вредного сопротивления, но и к значительному повышению уровня шума вследствие взаимовлияния пропульсивных движителей и несущих винтов. Кроме того, в такой конструкции, не исключалось появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущих винтов на упругом основании. Возникновение резонанса в поперечной схеме увеличивалось из-за наличия тяжелых гондол с винтомоторными установками на концах ферменных консолей крыла, имеющих главные опоры с подкосками неубирающегося колесного шасси, вследствие чего собственные частоты колебаний конструкции оказывались соизмеримы с частотой вращения несущих винтов. Другим недостатком является то, что вертолетные двигатели со свободной турбиной позволяют уменьшить частоту вращения несущих винтов только на 10-12%, а уменьшение частоты их вращения до 40% потребует использование различного рода муфт и коробок скоростей ведет, что приведет к дальнейшему увеличению веса трансмиссии. Что утяжеляет конструкцию и обеспечивает, уменьшая вес топлива, более высокий удельный расход топлива и, как следствие, ограничивает возможность повышения скорости и дальности полета, но и показателей транспортной и топливной эффективности.
Известен винтокрыл проекта Tilt Duct СН-47 компаний "Boeing/Piasecki" (США), выполненный по двухвинтовой продольной схеме, оснащен по бокам в кормовой части его фюзеляжа двухвинтовой движительной системой, снабжен двумя турбовальными двигателями, установленными с каждой стороны пилона заднего несущего винта и передающими мощность через трансмиссию валов и на передний и задний несущие винты, вращающиеся в противоположных направлениях, и на тянущие винты в кольцевых каналах, шасси убирающееся, четырехопорное, на передних опорах сдвоенные колеса, а колеса задних опор самоориентирующиеся, управляемые.
Признаки, совпадающие - наличие на пилонах над фюзеляжем несущих трехлопастных винтов диаметром 18,29 м, имеющих вращение в противоположных направлениях, а два турбовальных двигателя Т55-714А мощностью по 5000 л.с, используемых их всю мощность при вертикальном взлете и ее часть при горизонтальном полете соответственно на привод как несущих винтов при создании ими подъемной силы и пропульсивной тяги, так и приводящих тянущие винты, расположенные в кольцевых каналах, обеспечивающие горизонтальную тягу только при крейсерском полете, особенно, когда несущие винты станут вращаться на режиме близко к самовращению, как у автожира, создавая только подъемную силу при горизонтальном полете (авторотирующие несущие винты используются как переднее и заднее крылья, не создавая пропульсивной тяги), а потребную при этом горизонтальную тягу для крейсерского полета будут создавать винты в кольцевых каналах, что обеспечит винтокрылу более высокую экономичность, чем у вертолета, а избыточная тяговооруженность его силовой установки, обеспечивающая продолжение полета и на одном работающем двигателе, может создавать диапазон скоростей полета 350…400 км/час с полезной нагрузкой 6,0-8,1 тонн и как при нормальном взлетном весе винтокрыла 22680 кг, так и максимальном - 24494 кг, обеспечивая при этом также и радиус его действия до 935 км.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания и подъемной силы, и горизонтальной тяги (несущие винты и тянущие винты в кольцевых каналах), что неизбежно ведет к его утяжелению, особенно, с тянущими винтами в кольцевых каналах, используемыми лишь в горизонтальном поступательном полете, но и увеличению объема регламентных работ и удорожанию эксплуатации несущих винтов, имеющих автоматы перекоса с управлением общего и циклического изменения их шага и, как следствие, снижению весовой отдачи и дальности действия. Вторая - это то, что для движения вертолета в горизонтальном направлении несущие винты с помощью автоматов перекоса наклоняются вперед и создают не только подъемную силу, но и пропульсивную тягу, направленную вперед для преодоления вредного сопротивления, а возникающие по мере роста скорости полета и увеличения угла наклона несущих винтов вперед явления срыва потока на лопастях приводят к снижению несущей способности несущих винтов и аэродинамического качества винтокрыла, к чрезмерному росту нагрузок и напряжений в системе управления, что не допускает дальнейшего увеличения скорости полета. Третья - это то, что на режиме висения поток от несущего заднего винта, обдувая консоли прямого крыла малого удлинения с кольцевыми каналами тянущих винтов и создавая значительную общую потерю в его вертикальной тяге, затормаживается. При этом, скоростной воздушный поток, отбрасываемый от консолей заднего крыла и кольцевых каналов, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения. Кроме того, по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне каждого несущего винта возникает участок, в котором абсолютная скорость лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в продольном канале, особенно, из-за отсутствия такого же крыла под передним несущим винтом. Четвертая - это то, что в винтокрыле двухвинтовой продольной схемы основные потери взлетной мощности в силовой установке обусловлены, в первую очередь, интерференцией несущих винтов, но также и дополнительными потерями в трансмиссии, имеющей синхронизирующие (общей длиною почти 16 м) продольные валы передний и задний, состоящие из составных валов, соединенных между их частями соответственно восемью и двумя муфтами, объединяющими соответствующие главные редукторы несущих винтов с объединительным редуктором. При этом пульсации нагрузки, создаваемой, например, последними, а также дефекты изготовления муфт, приводящие к колебанию величины соосности в составных валах, могут возбуждать в системе трансмиссии колебания и вибрации более или менее значительной интенсивности, что приводит к снижению надежности. Пятая - это то, что в винтокрыле двухвинтовой продольной схемы с целью уменьшения длины фюзеляжа несущие винты имеют значительное перекрытие до 18-20%. Поэтому с целью уменьшения интерференции и вредного влияния переднего несущего винта на задний, последний размещен на пилоне выше переднего, что приводит к ухудшению весовой отдачи, а из-за интерференции ресурс заднего несущего винта и его редуктора гораздо меньше передних. Все это, в конечном итоге, обеспечивает более высокий удельный расход топлива и, как следствие, более высокую стоимость полета, но и ограничивает возможность дальнейшего повышения скорости полета и дальности действия, а также показателей транспортной и, особенно, топливной эффективности.
Наиболее близким к предлагаемому изобретению является вертолет-самолет-амфибия [патент RU 2310583 от 15.11.2005], содержащий винты в кольцевых каналах, размещенных на поворотных консолях крыла, и на пилоне несущий винт, имеет газотурбинные двигатели и трансмиссию, включающую систему редукторов с валами, вращающими несущие винты и винты в кольцевых каналах, и за хвостовым оперением на конце его балки газовые струйные рули путевого и продольного управления, трехопорную схему колесного шасси с главными колесами, убираемыми в обтекатели бортовых выступов.
Признаки, совпадающие - наличие на пилоне двухлопастного несущего винта, имеющего шумопонижающие стреловидные законцовки отогнутые в низ и противоположную сторону его вращения, и под ним на поворотных консолях высокорасположенного крыла, имеющих диапазон поворота от -5° до +95° с двумя тянущими винтами в кольцевых каналах, создающими горизонтальную и соответствующим их отклонением на угол 90° - вертикальную тягу или наклонную тягу - на угол 30° соответственно при выполнении вертикального или короткого взлета/посадки (ВВП и КВП), но и короткого взлета и вертикальной посадки (КВВП) с перегрузочным взлетным весом и оснащенных в их центре редукторами винтов. Последние связаны соединительными валами с главным редуктором, приводимым газотурбинным двигателем, который снабжен газоотводящими системами для газовых струйных рулей путевого и продольного управления, смонтированных на конце хвостовой балки.
Причины, препятствующие поставленной задаче: первая - это то, что ярусное расположение двух винтов в кольцевых каналах на поворотных консолях высокорасположенного крыла и над ними несущего винта предопределяет увеличение его габаритных размеров по высоте, затрудняющих его базирование и эксплуатацию на кораблях. Это также приводит и к уменьшению габаритных размеров поворотных кольцевых каналов и, как следствие, винты выполнены небольшого диаметра. Поэтому при создании ими вертикальной тяги, образуя малую ометаемую площадь, вызывают значительную нагрузку на нее и большую скорость отбрасываемого воздушного потока от поверхности, ухудшающего взаимовлияние винтов, особенно, работающих по тянущей схеме и при одинаковом направлении вращения несущего и тянущих консольных винтов. Вторая - это то, что винты, смонтированные на поворотных консолях высокорасположенного крыла в кольцевых каналах, имеют близкое расположение их линий вертикальной тяги от центра масс, что осложняет поперечную управляемость как на вертолетных, так и на переходных режимах полета. Третья - это то, что газотурбинный двигатель снабжен газовыми рулями путевого и продольного управления. Подобная схема увеличивает сложность и массу конструкции, приводит к необходимости увеличения длины хвостовой балки с газоотводящей удлинительной сопловой трубкой и к взаимовлиянию путевого и продольного управления, приводящие к запаздыванию путевого управления на 0,5-1 секунды по сравнению с управлением рулевым винтом. Кроме того непроизводительные затраты мощности, требуемые для парирования реактивного крутящего момента несущего винта реактивными соплами составляют 8-10% от мощности силовой установки (СУ). Все это ограничивает возможность повышения путевой и продольной управляемости и, следовательно, сверхманевренности при висении, а также дальнейшего повышения взлетного веса и полезной нагрузки, дальности полета и показателей транспортной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном вертолете-самолете-амфибии упрощение конструкции и исключения газовых струйных рулей продольного и путевого управления, удвоения взлетного веса и увеличения полезной нагрузки, улучшения весовой отдачи и уменьшения потребной мощности на путевую балансировку при висении, улучшения поперечной и продольной управляемости и повышения скорости, высоты и дальности полета, а также показателей транспортной и топливной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного вертолета-самолета-амфибии, наиболее близкого к нему, являются наличие того, что он выполнен по модульной схеме с тандемным расположением двух передней и задней трехвинтовых систем, выполненных с ярусным расположением разновеликих винтов (ЯРРВ) по схеме ЯРРВ-Х2+1, каждый из которых включает как упомянутые больший несущий винт и под ним высокорасположенное крыло с винтами в упомянутых кольцевых каналах, создающими суммарную тягу винтов, составляющую 35% от подъемной силы несущих винтов, так и обеспечивает при совместном их использовании возможность преобразования полетной конфигурации с вертолета двухвинтовой продольной или шестивинтовой продольно-поперечной схемы в крылатый автожир или винтокрыл с тандемным расположением крыльев с двух- или четырехвинтовой движительной системой, обеспечиваемой маршевую тяговооруженность 0,411 или 0,363 соответственно при нормальном его взлетном весе или перегрузочном его варианте на 13,4%, но и обратно, при этом средний задний из больших несущих винтов смонтирован без перекрытия и взаимного влияния с передним большим, но и размещен выше его на передней части законцовки вертикального оперения, имеющего по обе стороны от него на задних надкрыльных пилонах двигатели, каждый из которых выполнен с передним выводом вала для отбора взлетной его мощности и угловым редуктором с синхронизирующим валов, соединяющим двигатель с входным валом нижнего уровня многопоточного двухуровневого промежуточного с крестообразным верхним уровнем в плане редуктора, имеющего передний и задний продольные валы, соединенные с входными валами соответствующих главных Г-образных в плоскости симметрии редукторов несущих винтов, передний из которых наравне с промежуточным редуктором снабжен также левым и правым поперечными валами, связанными с редукторами соответствующих меньших винтов.
Кроме того, с целью упрощения конструкции и уменьшения акустической сигнатуры силовая установка снабжена двумя передними и двумя задними электромоторами, смонтированными на упомянутых поворотных консолях соответствующих крыльев таким образом, что передние из них размещены ближе к оси симметрии и разнесены в поперечной плоскости без перекрытия с задними, при этом их электромоторы установлены в гондолах на верхней части соответствующих крыльев, а упомянутые кольцевые каналы, имеющие флюгерно-реверсивные пропеллеры с большой круткой их саблевидных лопастей, вынесены за передние кромки соответствующих крыльев, образуя с последними в точках их соприкосновения совместную удобообтекаемую конструкцию.
Кроме того, с целью упрощения конструкции трансмиссии он выполнен по технологии многорежимного аэродинамического управления, обеспечивающего несущими и многолопастными вентиляторами с большой круткой их лопастей и с изменяемым шагом в кольцевых обтекателях небольшой длины соответственно подъемную силу с управлением по курсу и балансировку с соответствующим управлением по тангажу и крену, но и аэродинамической схеме биплан-тандем, создающей распределенную разгрузку каждого ненагруженного авторотирующего несущего винта с жестким креплением его лопастей и без автомата прекоса управления циклического изменения его шага, смонтированного на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе стреловидного верхнего крыла, образующего с соответствующим высокорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан-тандем малой высоты с крыльями большого удлинения и выносом концевых хорд каждой пары нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью переднюю и заднюю Х-образные в плане конфигурации, а также концепции консольного размещения четырехвинтовой движительно-рулевой системы (ДРС) с вентиляторами в кольцевых обтекателях, смонтированных на концах переднего и заднего КОС, создающими при висении и горизонтальном скоростном полете равновеликие тяги соответственно для управления как по тангажу, так и крену при интенсивной обдувке после предварительного соответствующего дифференциального отклонения развитых горизонтальных рулевых поверхностей соответственно как двух передних и двух задних, изменяющих продольную балансировку, так двух левых и двух правых, изменяющих поперечную балансировку, но и установленных на выходе снизу и сверху от центра каждого кольцевого обтекателя, подфюзеляжный киль, выполненный в виде цельно-поворотной концевой части, являясь рулем направления, обеспечивает стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле, каждое переднее и заднее КОС снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в 

Благодаря наличию отличительных признаков предлагаемого изобретения от указанного выше известного вертолета-самолета-амфибии, наиболее близкого к нему, является то, что многовинтовой беспилотный винтокрыл (МБВК) выполнен по технологии многорежимного аэродинамического управления, обеспечивающего несущими и многолопастными вентиляторами с большой круткой их лопастей и с изменяемым шагом в кольцевых обтекателях небольшой длины соответственно подъемную силу с управлением по курсу и балансировку с соответствующим управлением по тангажу и крену, но и аэродинамической схеме биплан-тандем, создающей распределенную разгрузку каждого ненагруженного несущего винта с жестким креплением его лопастей и без автомата прекоса управления циклического изменения его шага, смонтированного на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе стреловидного верхнего крыла, образующего с соответствующим высокорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан-тандем малой высоты с крыльями большого удлинения и выносом концевых хорд каждой пары нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью переднюю и заднюю Х-образные в плане конфигурации, а также концепции консольного размещения четырехвинтовой движительно-рулевой системы (ДРС) с многолопастными вентиляторами в кольцевых обтекателях, смонтированных на концах переднего и заднего КОС, создающими при висении и горизонтальном скоростном полете равновеликие тяги соответственно для управления как по тангажу, так и крену при интенсивной обдувке после предварительного соответствующего дифференциального отклонения развитых горизонтальных рулевых поверхностей соответственно как двух передних и двух задних, изменяющих продольную балансировку, так двух левых и двух правых, изменяющих поперечную балансировку, но и установленных на выходе снизу и сверху от центра каждого кольцевого обтекателя, подфюзеляжный киль, выполненный в виде цельно-поворотной концевой части, являясь рулем направления, обеспечивает упомянутой стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле, каждое переднее и заднее КОС снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в 

Дизель-электрическая СУ, выполненная по параллельно-последовательной гибридной технологии, снабжена двумя передними и двумя задними электромоторами с многолопастными вентиляторами, смонтированными в передней части кольцевых обтекателей на их крестообразных при виде спереди ребрах жесткости таким образом, что их электромоторы с редукторами вентиляторов и рули высоты вынесены вперед и назад соответственно от передней и задней кромок каждого КОС, и содержит спереди и по обе стороны от переднего и заднего пилонов несущих винтов соответственно центральную и боковые мотогондолы с обратимым электромотором-генератором (ОЭМГ) и двумя турбодизельными двигателями (ТДД), каждый из которых снабжен синхронизирующим валом с муфтой сцепления, вращательно связывающей их с соответствующими входными валами редуктора соответствующего несущего винта, но и представляющая собой полностью электрическую систему электропривода, включающую электромеханические приводы узлов изменения шага всех винтов, выпуска, руления и уборки шасси, управления механизации отклонения закрылок и всеми рулевыми поверхностями с электродистанционной системой управления, а также все электромоторы, аккумуляторные быстро перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, каждый из которых в режиме электрогенератора при полетной конфигурации крылатого автожира обеспечивает поочередно два способа генерации мощности или от внешнего источника энергии в режиме электроветрогенератора, или от внутренних источников соответственно от авторотирующего соответствующего несущего винта, вращающегося от набегающего потока, или от двух ТДД после отключения от них соответствующего несущего винта муфтой синхронной связи, при этом передняя и две боковые входные электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответствующих входных валов каждого редуктора несущего винта с валом ОЭМГ и валами ТДД, имеющие в случае отказа всех его ОЭМГ и ТДД возможность аварийной посадки, обеспечиваемой блоком управления, имеющим резервный источник электроэнергии для автоматического расцепления их валов с соответствующими входными валами редукторов несущих винтов и вентиляторов и установки их лопастей соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылок переднего и заднего КОС, так и синфазным отклонением вниз горизонтальных рулей высоты.
При авторотации или на режимах близком к самовращению несущих винтов, особенно, без управления циклического изменения их шага и с жестким креплением их лопастей срыв потока на их лопастях отодвигается на более высокие скорости полета, что позволит исключить потерю подъемной силы из-за срыва потока с отступающих его лопастей на режиме горизонтального скоростного полета и, как следствие, достичь скорости полета 450-480 км/ч. Поскольку благодаря кольцевым обтекателям отодвигается интенсивное возрастание волнового сопротивления до достижения окружной скорости концов лопастей многолопастных вентиляторов равной 280-290 м/с и, как следствие, увеличивается статическая тяга и за вентиляторами образуется воздушная струя, обладающая большой энергией, что позволяет установить на выходе кольцевых обтекателей и за ними эффективные аэродинамические рулевые поверхности. Использование кольцевых обтекателей, обеспечивая дополнительные несущие поверхности, увеличивает подъемную силу КОС и позволяет повысить безопасность, исключая возможность соприкосновения посторонних предметов с вентиляторами. Кроме того, исключает вредную интерференцию их вентиляторов с несущими винтами, уменьшает акустическую сигнатуру и шумовое воздействие при их работе в сравнении с винтами без кольцевых обтекателей, создающих аналогичную им тягу, но при высоком уровне интерференции и шума. Данные многолопастные вентиляторы кроме создания силы тяги и обеспечения управляемости на малых скоростях создают поток, обдувающий несущие поверхности, чем обеспечивается до 20% подъемной силы во время переходного режима полета, что повышает надежность и стабильность управления. Это также упрощает на вертолетных режимах полета продольное и поперечное управления, но и управление по курсу, что позволит использовать несущие винты без циклического изменения их шага и уменьшить вес конструкции. Все это позволит повысить скорость, высоту и дальность полета сверхманевренного МБВК с технологией многорежимного аэродинамического управления балансировкой по тангажу и крену, являющейся наиболее эффективной четырехвинтовой движительно-рулевой системой при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить безопасность, транспортную и топливную эффективность при скоростном горизонтальном полете и, особенно, многоцелевого МБВК тяжелого класса.
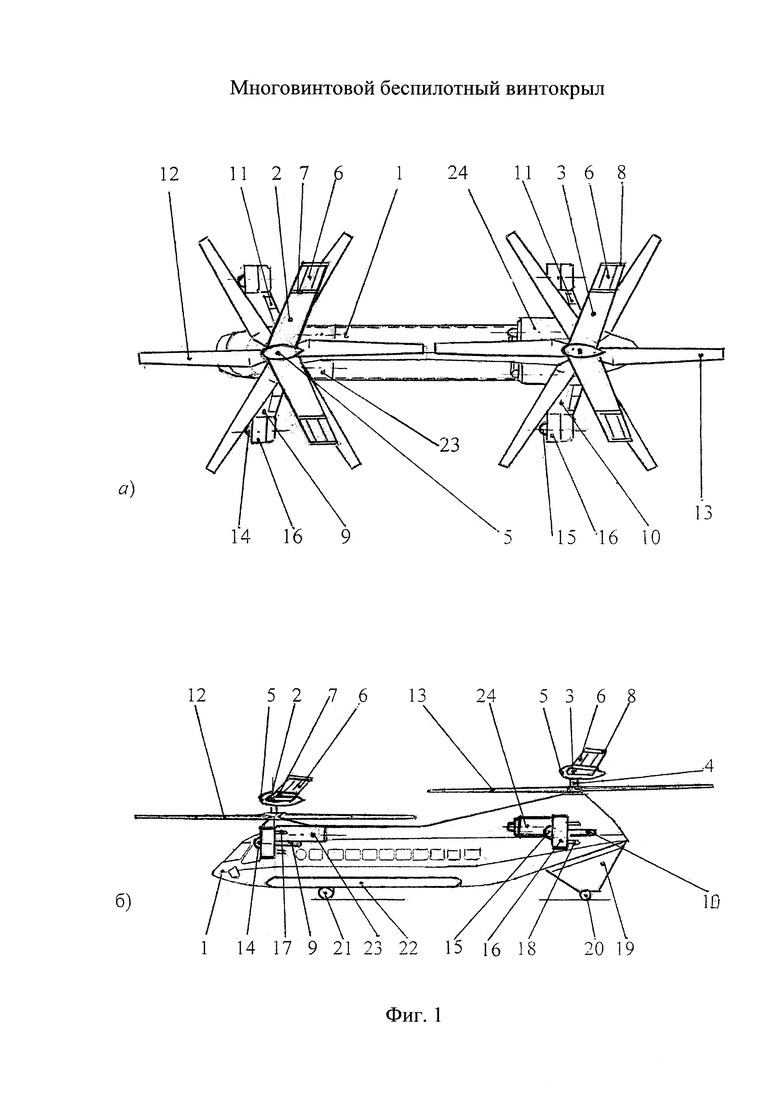
Предлагаемое изобретение многоцелевого МБВК с продольной двухвинтовой схемой, несущие винты которой обеспечивают только вертикальную тягу, и варианты возможного его использования с четырехвинтовой ДРС в условиях различной полетной конфигурации иллюстрируются общими видами, представленными на фиг. 1.
На фиг. 1 изображен МБВК на общих видах сверху и сбоку соответственно а) и б) с нижним и верхним крыльями схемы биплан-тандем, образующими две Х-образные конфигурации в плане, разгружающие несущие винты при его использовании:
а) в полетной конфигурации вертолета с несущими винтами, расположенными между нижних КОС и верхних стреловидных крыльев, имеющих трехэлементные разрезные устройства, но и с размещенными на концах КОС кольцевыми обтекателями, имеющими многолопастные вентиляторы и рули высоты четырехвинтовой ДРС;
б) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами, включающей крылья схемы биплан-тандем совместно с несущими винтами, авторотирующими или вращающимися на режиме близком к их самовращению, и многолопастные вентиляторы, создающие маршевую тягу.
Многовинтовой беспилотный винтокрыл, представленный на фиг. 1, содержит фюзеляж 1 и верхнее стреловидное переднее 2 и заднее 3 крылья, каждое из них смонтировано на полой опоре 4 в каплевидном обтекателе 5, имеет положительный угол поперечного V и для повышения подъемной силы на его концах трехэлементные разрезные устройства 6, установленные между внутренних 7 и концевых 8 плоских профилированных шайб. Нижние крылья схемы биплан-тандем малой высоты представляют собой переднее 9 и заднее 10 прямое КОС. Крылья 2-3 и 9-10 схемы биплан-тандем имеют наивыгоднейший тонкий профиль, обеспечивающий необходимый и достаточный прирост подъемной силы с крейсерского полета на переходный и взлетно-посадочный режимы. Нижние КОС 9-10 оснащены (см. фиг. 1a) закрылками 11, имеющими возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении. Концевые части крыльев 2-3 и 9-10, выполненные отклоняющимися вверх и складывающимися (наравне с четырьмя лопастями каждого несущего винта) для удобства размещения в ангаре или на палубе и упрощения эксплуатации при стоянке.
В несущей схеме с ДРС, имеющей двухвинтовую продольную схему с передним 12 и задним 13 несущими винтами, которые обеспечивают только вертикальную тягу смонтированы на вертикальных опорах 4, проходящих внутри их валов и установленных между главным редуктором (на фиг. 1 не показан) и каплевидным обтекателем 5 соответствующего крыла 2-3, образующего с нижними КОС 9-10 схему биплан-тандем с двумя Х-образными конфигурациями в плане (см. фиг. 1а), но и содержит консольную четырехвинтовую ДРС, включающую рулевые передние 14 и задние 15 многолопастные вентиляторы в кольцевых обтекателях 16 (см. фиг. 1,б), имеющих на выходе соответствующие горизонтальные верхние 17 и нижние 18 рули высоты, создающие при их обдуве как при висении управление по тангажу и крену, так и маршевые тяги при поступательном скоростном полете для выполнения технологии ВВП и КВП, но КВВП. Цельно-поворотной подфюзеляжный киль 19, обеспечивающей стойке заднего колеса 20 возможность совместно с передними колесами 21, смонтированными в обтекателях 22 бортовых выступов, снабженных аккумуляторами, управляемого разворота кормовой части фюзеляжа 1 МБВК при его рулении на земле.
Силовая установка, включающая две пары (на фиг.1 не показаны) ТДД, расположенных в обтекаемых передних 23 и задних 24 мотогондолах по обе стороны от плоскости симметрии, выступающих за обводы фюзеляжа 1. Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от каждого шестилопастного несущего винта на режиме висения концы лопастей имеют шумопонижающие стреловидные законцовки (на. фиг. 1 не показаны). Мощность от пары передних 23 и пары задних 24 ТДД с их соответствующими ОЭМГ в дизель-электрической СУ передается соответственно несущим винтам 12 и 13, посредством системы входных валов, связанных с соответствующим главным редуктором (на фиг. 1 не показаны). Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение, предопределяет возможность легко реализовать выполнение технологии КВП и КВВП, но и повышения скорости горизонтального поступательного полета до 450 км/ч. При этом муфтами сцепления возможно в СУ отключение любого избыточного ТДД. В случае отказа двух ТДД, то возможна посадка МБВК в полетной конфигурации крылатого автожира на режиме авторотации его несущих винтов 12-13.
Управление многоцелевым МБВК при различных режимах его полета обеспечивается общим (изменяющим силу тяги) шагом несущих винтов 12-13 с жестким креплением их лопастей и с большой круткой четырех меньших многолопастных вентиляторов 14-15 в кольцевых обтекателях 16 как при поступательном горизонтальном скоростном его полете, так и вертикальном взлете/посадке или висении посредством многорежимной аэродинамической системы управления балансировкой (МАСУБ) по крену, тангажу и курсу соответственно как рулями высоты 18 и рулем направления 19 при горизонтальном полете, так и несущими винтами 12-13 при висении.
В полетной конфигурации вертолета с несущими винтами 12-13, расположенными соответственно между нижних КОС 9-10 и верхних стреловидных крыльев 2-3, имеющих трехэлементные разрезные устройства 6, но и с размещенными на концах КОС 9-10 четырехвинтовой ДРС с кольцевыми обтекателями 16, имеющими многолопастные вентиляторы 14-15 и рули высоты 18, создающие совместно при горизонтальном поступательном полете МБВК и висении управление по тангажу и крену, а управление по курсу при этом обеспечивается соответственно цельно-поворотным рулем 19 направления и изменением крутящих моментов больших несущих винтов 12-13. В полетной конфигурации крылатого автожира или винтокрыла маршевая тяга обеспечивается четырьмя многолопастными вентиляторами 14-15 в кольцевых обтекателях 16, а подъемная сила создается крыльями передними 2-9 и задними 3-10 схемы биплан-тандем и совместно со смонтированными между ними соответствующими несущими винтами 12 и 13 авторотирующими или вращающимся на режиме близком к самовращению (см. фиг. 1б). На режиме вертикального взлета, посадки и висения подъемная сила создается только несущими винтами 12-13 (см. фиг. 1б), а на режиме перехода - крыльями 2-9 и 3-10 совместно с большими несущими винтами 12 и 13.
При висении направление полета может осуществляться как у вертолета двухвинтовой продольной несущей схемы: поворачиваясь влево-вправо, перемещаясь вверх-вниз, поступательный полет вперед-назад, влево-вправо и в любой комбинации (см. фиг. 1б). С приближением к поверхности земли или палубы корабля и при полете вблизи них на вертолетных режимах полета несущие больший 12 и средний 13 винты образуют под МБВК область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышающего их КПД. Для соответствующей посадки на поверхность земли или палубы корабля используются колеса 20 и 21 с убирающимися только главными последними из них в обтекатели 22 бортовых выступов.
При полете МБВК с коротким взлетом и посадкой при его максимальном взлетном весе может осуществляться как у комбинированного вертолета, т.е. винтокрыла. В этом случае его многолопастные вентиляторы 14-15 в кольцевых обтекателях 16 обеспечивают пропульсивную тягу, а несущие винты 12-13, изменяя угол установки их лопастей, вследствие чего формируется и движущая сила, создающая для разбега маршевую тягу, и подъемная сила большая подъемной силы, обеспечиваемой крыльями передними 2-9 и задними 3-10, разгружающие несущие винты 12-13. При этом мощность, обеспечиваемая работающими ТДД с ОЭМГ, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется на вентиляторы 14-15 в кольцевых обтекателях 16, а остальные из 60% или 70% мощности перераспределяются через главный и промежуточный редуктор на несущие винты 12-13. Это позволяет увеличить соответственно взлетный его вес на 7 и 15%, а также и скорость крейсерского полета, так как при высоких скоростях полетная комбинация крылья передними 2-9 и задними 3-10 с меньшими вентиляторами 14-15 гораздо выгоднее для создания подъемной силы и маршевой тяги, чем одним несущими винтами 12-13. После набора высоты горизонтальный полет МБВК при максимальной полезной нагрузке может осуществляться также как у крылатого автожира. В этом случае вентиляторы 14-15 обеспечивают маршевую тягу, а несущие винты 12-13 отключается от привода двигателей СУ и он начинает авторотировать, создавая только подъемную силу меньшую подъемной силы, обеспечиваемой крыльями 2-9 и 3-10. Кроме того, при авторотации срыв потока на лопастях несущего винта отодвигается на более высокие скорости полета, что позволит получить скорости полета до 480-500 км/ч.
Таким образом, многоцелевой МБВК выполнен по технологии МАСУБ, обеспечивающей разновеликими винтами управление по тангажу, крену и курсу, но и схеме биплан-тандем, создающей распределенную разгрузку переднего и заднего ненагруженных авторотирующих несущих винтов без управления циклического изменения их шага и с жестким креплением их лопастей, но и с четырехвинтовой ДРС, имеющей передние и задние меньшие многолопастные вентиляторы в кольцевых обтекателях, смонтированных на концах нижних КОС, образующих с верхними стреловидными крыльями в схеме биплан-тандем две Х-образные конфигурации в плане.
Для удвоения взлетного веса, упрощения конструкции и исключения автоматов перекоса несущих винтов выбор двухвинтовой продольной схемы с двумя передним и задним модулями ЯРРВ-Х2+1, каждый из которых включает несущий винт без автомата прекоса, размещенный между нижним КОС и верхним стреловидным крылом с разрезным устройством не случаен, т.к. подобная компоновка исключает потерю подъемной силы из-за срыва потока с отступающих лопастей ненагруженных несущих винтов на режиме скоростного полета, компенсируя оную их противовращением, и обладает аэродинамической симметрией. Передние и задние флюгерно-реверсивные многолопастные вентиляторы в соответствующих кольцевых обтекателях, создающие маршевую тягу, обеспечивают необходимое повышение скорости горизонтального полета и уменьшение дистанции при посадке с пробегом. Верхние стреловидные крылья с разрезными устройствами совместно с нижними КОС первого и заднего модулей ЯРРВ-Х2+1 находятся спереди и позади центра масс, создавая подъемную силу, разгружают соответствующие ненагруженные авторотирующие несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность достичь в полетной конфигурации крылатого автожира скорости полета до 463 км/ч.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Многовинтовой беспилотный винтокрыл (МБВК) содержит винты в кольцевых каналах, размещенных на поворотных консолях крыла, несущие винты, газотурбинные двигатели и трансмиссию, включающую систему редукторов с валами, вращающими несущие винты и винты в кольцевых каналах. МБВК выполнен по модульной схеме с тандемным расположением передней и задней трехвинтовых систем, выполненных с ярусным расположением разновеликих винтов, каждая из которых включает больший несущий винт и под ним высокорасположенное крыло с винтами в кольцевых каналах. МБВК имеет возможность преобразования полетной конфигурации с вертолета двухвинтовой продольной или шестивинтовой продольно-поперечной схемы в крылатый автожир или винтокрыл с тандемным расположением крыльев с двух- или четырехвинтовой движительной системой. Задний несущий винт смонтирован без перекрытия и взаимного влияния с передним и размещен выше его на передней части законцовки вертикального оперения, имеющего по обе стороны от него на задних надкрыльных пилонах двигатели, каждый из которых выполнен с передним выводом вала для отбора мощности. Достигается снижение потребной мощности на балансировку при висении, улучшение поперечной и продольной управляемости. 2 з.п. ф-лы, 1 ил.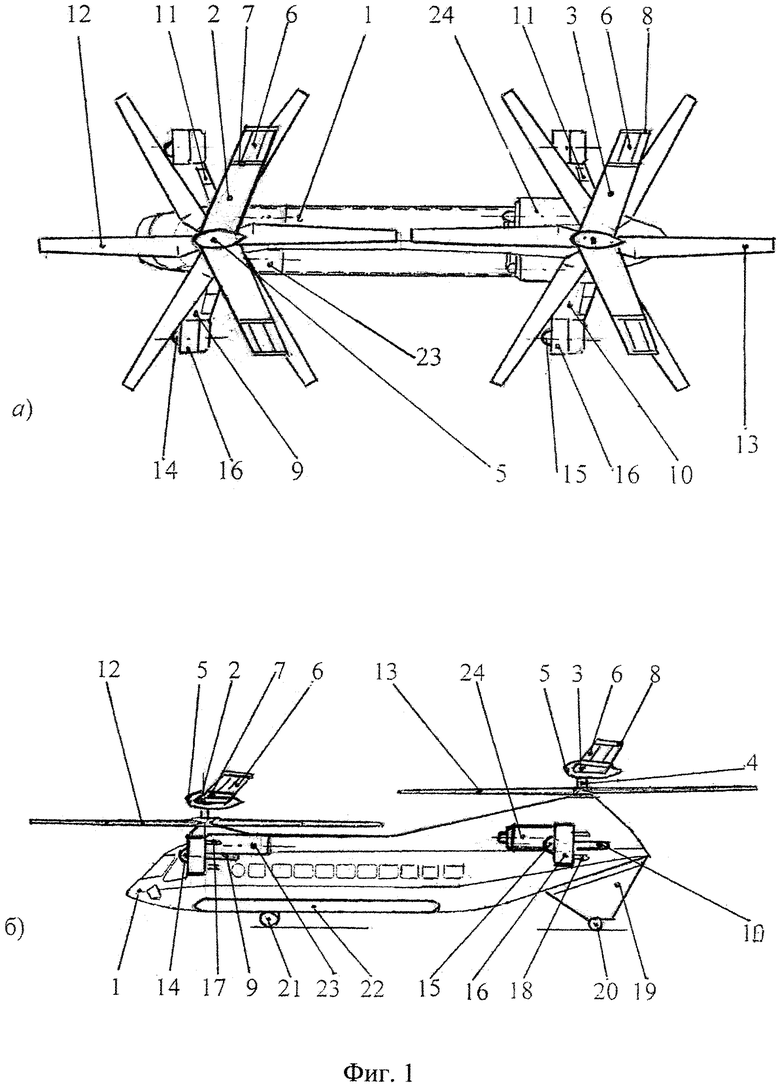
1. Многовинтовой беспилотный винтокрыл, содержащий винты в кольцевых каналах, размещенных на поворотных консолях крыла, и на пилоне несущий винт, имеет газотурбинные двигатели и трансмиссию, включающую систему редукторов с валами, вращающими несущие винты и винты в кольцевых каналах, трехопорную схему колесного шасси с главными колесами, убираемыми в обтекатели бортовых выступов, отличающийся тем, что он выполнен по модульной схеме с тандемным расположением двух передней и задней трехвинтовых систем, выполненных с ярусным расположением разновеликих винтов (ЯРРВ) по схеме ЯРРВ-Х2+1, каждый из которых включает как упомянутые больший несущий винт и под ним высокорасположенное крыло с винтами в упомянутых кольцевых каналах, создающими суммарную тягу винтов, составляющую 35% от подъемной силы несущих винтов, так и обеспечивает при совместном их использовании возможность преобразования полетной конфигурации с вертолета двухвинтовой продольной или шестивинтовой продольно-поперечной схемы в крылатый автожир или винтокрыл с тандемным расположением крыльев с двух- или четырехвинтовой движительной системой, обеспечиваемой маршевую тяговооруженность 0,411 или 0,363 соответственно при нормальном его взлетном весе или перегрузочном его варианте на 13,4%, но и обратно, при этом средний задний из больших несущих винтов смонтирован без перекрытия и взаимного влияния с передним большим, но и размещен выше его на передней части законцовки вертикального оперения, имеющего по обе стороны от него на задних надкрыльных пилонах двигатели, каждый из которых выполнен с передним выводом вала для отбора взлетной его мощности и угловым редуктором с синхронизирующим валом, соединяющим двигатель с входным валом нижнего уровня многопоточного двухуровневого промежуточного с крестообразным верхним уровнем в плане редуктора, имеющего передний и задний продольные валы, соединенные с входными валами соответствующих главных Г-образных в плоскости симметрии редукторов несущих винтов, передний из которых наравне с промежуточным редуктором снабжен также левым и правым поперечными валами, связанными с редукторами соответствующих меньших винтов.
2. Многовинтовой беспилотный винтокрыл по п. 1, отличающийся тем, что с целью упрощения конструкции и уменьшения акустической сигнатуры силовая установка снабжена двумя передними и двумя задними электромоторами, смонтированными на упомянутых поворотных консолях соответствующих крыльев таким образом, что передние из них размещены ближе к оси симметрии и разнесены в поперечной плоскости без перекрытия с задними, при этом их электромоторы установлены в гондолах на верхней части соответствующих крыльев, а упомянутые кольцевые каналы, имеющие флюгерно-реверсивные пропеллеры с большой круткой их саблевидных лопастей, вынесены за передние кромки соответствующих крыльев, образуя с последними в точках их соприкосновения совместную удобообтекаемую конструкцию.
3. Многовинтовой беспилотный винтокрыл по п. 1 и 2, отличающийся тем, что с целью упрощения конструкции трансмиссии он выполнен по технологии многорежимного аэродинамического управления, обеспечивающего несущими и многолопастными вентиляторами с большой круткой их лопастей и с изменяемым шагом в кольцевых обтекателях небольшой длины соответственно подъемную силу с управлением по курсу и балансировку с соответствующим управлением по тангажу и крену, но и аэродинамической схеме биплан-тандем, создающей распределенную разгрузку каждого ненагруженного авторотирующего несущего винта с жестким креплением его лопастей и без автомата прекоса управления циклического изменения его шага, смонтированного на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе стреловидного верхнего крыла, образующего с соответствующим высокорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан-тандем малой высоты с крыльями большого удлинения и выносом концевых хорд каждой пары нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью переднюю и заднюю Х-образные в плане конфигурации, а также концепции консольного размещения четырехвинтовой движительно-рулевой системы (ДРС) с вентиляторами в кольцевых обтекателях, смонтированных на концах переднего и заднего КОС, создающими при висении и горизонтальном скоростном полете равновеликие тяги соответственно для управления как по тангажу, так и крену при интенсивной обдувке после предварительного соответствующего дифференциального отклонения развитых горизонтальных рулевых поверхностей соответственно как двух передних и двух задних, изменяющих продольную балансировку, так двух левых и двух правых, изменяющих поперечную балансировку, но и установленных на выходе снизу и сверху от центра каждого кольцевого обтекателя, подфюзеляжный киль, выполненный в виде цельно-поворотной концевой части, являясь рулем направления, обеспечивает стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле, каждое переднее и заднее КОС снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в  раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении и образующими при максимальном их отклонении как бы КОС "обратного сужения", создающего в зоне максимальных индуктивных скоростей воздушного потока от несущего винта возможность и уменьшения на 8% потерь подъемной силы от обдувки консолей КОС, и препятствования обратному перетеканию воздушного потока, каждая консоль верхнего крыла, имеющего положительный угол поперечного V, снабжена трехэлементным разрезным устройством с несущими поверхностями, смонтированными между его внутренней и концевой плоскими шайбами и обеспечивающими при вертикальной их обдувке воздушным осевым потоком от несущего винта увеличение коэффициента подъемной силы от верхнего крыла при вертикальном взлете/посадке и висении, каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайбами в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль верхнего крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ) в их сборке равную
раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении и образующими при максимальном их отклонении как бы КОС "обратного сужения", создающего в зоне максимальных индуктивных скоростей воздушного потока от несущего винта возможность и уменьшения на 8% потерь подъемной силы от обдувки консолей КОС, и препятствования обратному перетеканию воздушного потока, каждая консоль верхнего крыла, имеющего положительный угол поперечного V, снабжена трехэлементным разрезным устройством с несущими поверхностями, смонтированными между его внутренней и концевой плоскими шайбами и обеспечивающими при вертикальной их обдувке воздушным осевым потоком от несущего винта увеличение коэффициента подъемной силы от верхнего крыла при вертикальном взлете/посадке и висении, каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайбами в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль верхнего крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ) в их сборке равную  от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ), перераспределяемая главными и промежуточным редукторами на несущие винты и четырехвинтовую ДРС соответственно 88% и 12% от располагаемой взлетной ее мощности, а 12% мощности из последних, в свою очередь, распределяются поровну между четырьмя вентиляторами, создающими также маршевую тягу для горизонтального скоростного полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости после как вертикального, так и короткого взлета в полетной конфигурации соответственно как вертолета, так и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающихся несущих винтах соответственно на режимах авторотации или близком к их самовращению и создании ими подъемной силы, при этом маршевая тяга четырех вентиляторов, обеспечиваемая работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через упомянутые промежуточный и передний главный редукторы на четыре вентилятора, а остальные из 60% или 70% мощности перераспределяются через главные и промежуточные редукторы на несущие винты, но и обратно, причем дизель-электрическая СУ, выполненная по параллельно-последовательной гибридной технологии, снабжена двумя передними и двумя задними электромоторами с многолопастными вентиляторами, смонтированными в передней части кольцевых каналов на их крестообразных при виде спереди ребрах жесткости таким образом, что их электромоторы с редукторами вентиляторов и рули высоты вынесены вперед и назад соответственно от передней и задней кромок каждого КОС, и содержит спереди и по обе стороны от переднего и заднего пилонов несущих винтов соответственно центральную и боковые мотогондолы с обратимым электромотором-генератором (ОЭМГ) и двумя турбодизельными двигателями (ТДД), каждый из которых снабжен синхронизирующим валом с муфтой сцепления, вращательно связывающей их с соответствующими входными валами редуктора соответствующего несущего винта, но и представляющая собой полностью электрическую систему электропривода, включающую электромеханические приводы узлов изменения шага всех винтов, выпуска, руления и уборки шасси, управления механизации отклонения закрылок и всеми рулевыми поверхностями с электродистанционной системой управления, а также все электромоторы, аккумуляторные быстро перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, каждый из которых в режиме электрогенератора при полетной конфигурации крылатого автожира обеспечивает поочередно два способа генерации мощности или от внешнего источника энергии в режиме электроветрогенератора, или от внутренних источников соответственно от авторотирующего соответствующего несущего винта, вращающегося от набегающего потока, или от двух ТДД после отключения от них соответствующего несущего винта муфтой синхронной связи, при этом передняя и две боковые входные электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответствующих входных валов каждого редуктора несущего винта с валом ОЭМГ и валами ТДД, имеющие в случае отказа всех его ОЭМГ и ТДД возможность аварийной посадки, обеспечиваемой блоком управления, имеющим резервный источник электроэнергии для автоматического расцепления их валов с соответствующими входными валами редукторов несущих винтов и вентиляторов и установки их лопастей соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылок переднего и заднего КОС, так и синфазным отклонением вниз горизонтальных рулей высоты.
от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ), перераспределяемая главными и промежуточным редукторами на несущие винты и четырехвинтовую ДРС соответственно 88% и 12% от располагаемой взлетной ее мощности, а 12% мощности из последних, в свою очередь, распределяются поровну между четырьмя вентиляторами, создающими также маршевую тягу для горизонтального скоростного полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости после как вертикального, так и короткого взлета в полетной конфигурации соответственно как вертолета, так и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающихся несущих винтах соответственно на режимах авторотации или близком к их самовращению и создании ими подъемной силы, при этом маршевая тяга четырех вентиляторов, обеспечиваемая работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через упомянутые промежуточный и передний главный редукторы на четыре вентилятора, а остальные из 60% или 70% мощности перераспределяются через главные и промежуточные редукторы на несущие винты, но и обратно, причем дизель-электрическая СУ, выполненная по параллельно-последовательной гибридной технологии, снабжена двумя передними и двумя задними электромоторами с многолопастными вентиляторами, смонтированными в передней части кольцевых каналов на их крестообразных при виде спереди ребрах жесткости таким образом, что их электромоторы с редукторами вентиляторов и рули высоты вынесены вперед и назад соответственно от передней и задней кромок каждого КОС, и содержит спереди и по обе стороны от переднего и заднего пилонов несущих винтов соответственно центральную и боковые мотогондолы с обратимым электромотором-генератором (ОЭМГ) и двумя турбодизельными двигателями (ТДД), каждый из которых снабжен синхронизирующим валом с муфтой сцепления, вращательно связывающей их с соответствующими входными валами редуктора соответствующего несущего винта, но и представляющая собой полностью электрическую систему электропривода, включающую электромеханические приводы узлов изменения шага всех винтов, выпуска, руления и уборки шасси, управления механизации отклонения закрылок и всеми рулевыми поверхностями с электродистанционной системой управления, а также все электромоторы, аккумуляторные быстро перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от ОЭМГ, каждый из которых в режиме электрогенератора при полетной конфигурации крылатого автожира обеспечивает поочередно два способа генерации мощности или от внешнего источника энергии в режиме электроветрогенератора, или от внутренних источников соответственно от авторотирующего соответствующего несущего винта, вращающегося от набегающего потока, или от двух ТДД после отключения от них соответствующего несущего винта муфтой синхронной связи, при этом передняя и две боковые входные электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответствующих входных валов каждого редуктора несущего винта с валом ОЭМГ и валами ТДД, имеющие в случае отказа всех его ОЭМГ и ТДД возможность аварийной посадки, обеспечиваемой блоком управления, имеющим резервный источник электроэнергии для автоматического расцепления их валов с соответствующими входными валами редукторов несущих винтов и вентиляторов и установки их лопастей соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылок переднего и заднего КОС, так и синфазным отклонением вниз горизонтальных рулей высоты.
| US 2009014580 A1, 15.01.2009 | |||
| US 2014034774 A1, 06.02.2014 | |||
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРОЛИТА ВЫСОКОЙ ЧИСТОТЫ ДЛЯ ВАНАДИЕВОГО АККУМУЛЯТОРА | 2017 |
|
RU2690012C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |

