Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства для соединения валов, деталей машин и механизмов в условиях, требующих повышенной точности по их соосности.
Техническим результатом изобретения является:
повышение точности базирования держателя в корпусе за счет последовательного геометрического замыкания базовых поверхностей в два этапа вследствие смещения оси внутренних конусов на упругих лепестках держателя относительно оси кулачков механизма зажима в сторону торцовой базовой поверхности, использования кулачков механизма зажима в качестве элемента передающего крутящий момент, самоцентрирования и самозаклинивания соединения;
простота, технологичность конструкции, уменьшение габаритов за счет размещения механизма зажима в корпусе, а не в держателе, цилиндрической форме отверстий в корпусе и цилиндрических кулачков механизма зажима, отсутствие торцовой шпонки, передающей крутящий момент;
расширение области использования устройства за счет возможности механизации и автоматизации зажима вследствие размещения механизма зажима в корпусе, а не в держателе;
На фиг. 1 показана система сил на 1 этапе зажима, общий вид; на фиг.2 разрез А-А на фиг.1; на фиг.3 система сил, действующих на держатель при зажиме; на фиг.4 система сил, действующих на держатель в процессе работы.
Устройство соединения модулей содержит корпус 1 с торцовой 2 и перпендикулярной к этой поверхности цилиндрической 3 базовой поверхностью. На держателе 4 имеются упругие лепестки 5, ответные торцовая 6 и цилиндрическая 7 на упругих лепестках 5 базовые поверхности. В корпусе установлены с возможностью осевого перемещения от зажимного винта с правой и левой резьбой 8 спаренные кулачки левый 9 и правый 10 с наружными конусами 11,12, а также стопорное кольцо 13 для фиксации и исключения поворота этих кулачков вокруг оси.
На упругих лепестках 5 держателя 4 выполнены внутренние конуса 14 и 15, ось 16 которых параллельна, но смещена относительно оси 17 наружных конусов 11,12 кулачков 9,10 в сторону торцовой базовой поверхности 6. Держатель инструмента 4 имеет паз 18 для входа и выхода зажимного винта 8 при переустановке держателя в корпусе.
Устройство работает следующим образом.
Держатель инструмента вставляется в корпус 1 своими упругими лепестками 5 с зазорами между торцовыми 2-6 и цилиндрическими 3-7 базовыми поверхностями так, чтобы зажимной винт 8 вошел в паз 18 держателя.
При вращении зажимного винта с правой и левой резьбой 8 против часовой стрелки ключом через углубление под ключ 19 происходит осевое перемещение спаренных кулачков 9 и 10 друг к другу. Осевое усилие Р перемещает наружные конуса 11 и 12 на кулачках 9 и 10 до касания их с внутренними конусами 14 и 15.
Возникает радиальное усилие F, которое вследствие малого угла уклона конуса α превосходит осевую составляющую Р/2 (фиг.3): F N cos α P/2 N sin α, где N сила нормального давления; α угол уклона конуса ( α< 30о).
Радиальное усилие F (фиг.1) раскладывается в точке касания на две составляющие силы, действующие на держатель 4:
Т направлена вдоль оси держателя;
Q направлена перпендикулярно оси держателя.
Зажим держателя 4 в корпусе 1 осуществляется геометрическим и силовым замыканием базовых поверхностей 2-6, 3-7 в два этапа.
На первом этапе вследствие смещения оси внутренних конусов 16 относительно оси 17 наружных конусов в сторону торцовой базовой поверхности происходит касание наружных конусов 11 и 12 на кулачках 9 и 10 с внутренними конусами 14 и 15 первоначально в местах 20. Составляющая Т радиального усилия F в местах 20 больше составляющей Q, что приводит к перемещению держателя 4 внутрь корпуса 1 вдоль оси до геометрического замыкания торцовых базовых поверхностей 2-6.
На втором этапе происходит постепенное перемещение точки касания наружных конусов 11,12 с внутренними конусами 14,15 от места 20 до места 21. Соотношение составляющих сил Т и Q радиального усилия F меняется по мере перемещения точки касания. Чем точка касания дальше от места 20 к месту 21, тем больше угол между векторами составляющей Т и усилием F и соответственно сила Т уменьшается, а Q увеличивается, Упругие лепестки 5, деформируясь за счет возрастающей силы Q, направленной перпендикулярно оси держателя, выбирают зазоры и центрируют держатель 4 в корпусе 1 до обеспечения соосности и геометрического замыкания базовых цилиндрических поверхностей 3-7 (фиг.2).
Кулачки 9 и 10 являются элементами, передающими крутящий момент от корпуса 1 к держателю 4. В процессе работы силы М крутящего момента (фиг.4) создают усилия К, которые деформируют упругие лепестки 5 держателя 4, выбирают зазоры по цилиндрическим поверхностям и центрируют держатель 4 в корпусе. Происходит процесс самозаклинивания и самоцентрирования устройства. Чем больше передаваемый крутящий момент, тем больше натяжение и соответственно точность на торцовых и цилиндрических базовых поверхностях.
Освобождение держателя 4 из корпуса 1 осуществляется вращением зажимного винта с правой и левой резьбой 8 по часовой стрелке. Происходит осевое перемещение спаренных кулачков 9 и 10 друг от друга, выход из силового контакта наружных конусов 11 и 12 кулачков с внутренними конусами 14 и 15 упругих лепестков 5 держателя 4 и размыкание цилиндрических 3-7, торцовых 2-6 базовых поверхностей держателя 4 и корпуса 1. Держатель может быть заменен.
Держатель может быть использован не только в устройстве соединения модулей инструмента, а также в устройствах крепления инструмента на станках, в том числе устройствах автоматической смены инструмента.
Использование предлагаемого устройства соединения модулей позволяет:
повысить точность базирования держателя в корпусе; упростить конструкцию; улучшить условия обслуживания; расширить область использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механизированного крепления держателя инструмента | 1990 |
|
SU1743788A1 |
| Устройство для механизированного крепления инструмента | 1986 |
|
SU1404248A1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
| Поводковый самозажимной патрон | 1986 |
|
SU1423296A1 |
| ЦАНГОВЫЙ ЗАХВАТ ТРУБЫ | 2011 |
|
RU2476370C1 |
| ЗАТВОР ПОВЫШЕННОЙ ГЕРМЕТИЧНОСТИ И ВИБРАЦИОННОЙ СТОЙКОСТИ ДЛЯ СОСУДОВ И АППАРАТОВ, РАБОТАЮЩИХ ПОД ВНУТРЕННИМ ИЛИ НАРУЖНЫМ ДАВЛЕНИЕМ | 2004 |
|
RU2268428C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2002 |
|
RU2240912C2 |
| СПОСОБ ФИКСАЦИИ ДЕРЖАТЕЛЕЙ ДЛЯ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ, ПОДЛЕЖАЩИХ МЕХАНИЧЕСКОЙ ОБРАБОТКЕ В ЗОНЕ ОБРАБОТКИ МЕТАЛЛОРЕЖУЩЕГО СТАНКА В ТОЧНО ОПРЕДЕЛЕННОМ И ЗАРАНЕЕ ЗАДАННОМ ПОЛОЖЕНИИ, И ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2481939C2 |
| ДВИГАТЕЛЬ ДВУХВАЛЬНЫЙ ПОРШНЕВОЙ С ДВУХСТОРОННИМИ РАБОЧИМИ ХОДАМИ | 2011 |
|
RU2478794C2 |
| ЗАТВОР ПОВЫШЕННОЙ ГЕРМЕТИЧНОСТИ И ВИБРАЦИОННОЙ СТОЙКОСТИ С УСИЛЕННЫМ СТОПОРЕНИЕМ ДЛЯ СОСУДОВ И АППАРАТОВ, РАБОТАЮЩИХ ПОД ВНУТРЕННИМ ИЛИ НАРУЖНЫМ ДАВЛЕНИЕМ | 2007 |
|
RU2346197C1 |



Использование: изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства для соединения валов, деталей машин и механизмов в условиях, требующих повышенной точности по их соосности. Сушность изобретения: устройство содержит корпус 1 с торцовой 2 и перпендикулярной к ней цилиндрической 3 базовыми поверхностями. На держателе 4 имеются упругие лепестки с ответными торцовой 6 и цилиндрической 7 поверхностями. Наружные конуса кулачков механизма зажима взаимодействуют с внутренними конусами упругих лепестков. Ось 16 внутренних конусов параллельна относительна оси 17 наружных конусов кулачков и смещена в направлении к торцовой базовой поверхности 2. Зажим держателя 4 на курсе 1 происходит за счет геометрического и слового замыкания базовых поверхностей в два этапа. 4 ил.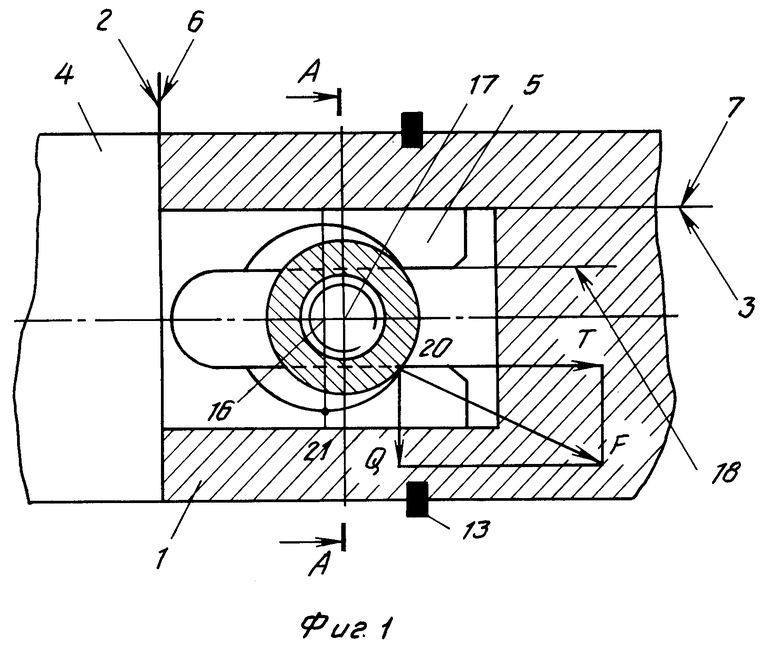
УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ МОДУЛЕЙ, содержащее корпус с торцевой и перпендикулярной ей цилиндрической базовыми поверхностями, держатель с ответными торцевой и цилиндрической поверхностями и механизм зажима со спаренными кулачками, ось которых параллельна торцевой базовой поверхности, отличающееся тем, что на держателе выполнены упругие лепестки с внутренными конусами, а спаренные кулачки механизма зажима расположены в корпусе, являются элементами передачи крутящего момента и имеют наружные конуса, предназначенные для взаимодействия с внутренними конусами, при этом наружная поверхность упругих лепестков представляет собой ответную цилиндрическую поверхность, а ось последних параллельна оси кулачков и смещена в направлении к торцевой базовой поверхности.
| Информационное издание ВИНИТИ, Рж 14 | |||
| Технология машиностроения, 1989, вып.3, реферат ЗА 139. |
