Изобретение относится к области атомного машиностроения, в частности к оборудованию демонтажа радиоактивных объектов в виде труб.
Известно устройство - механизм клинового захвата для деталей с углублением [Боренштейн Ю.П. Исполнительные механизмы захватывающих устройств. - Л.: Машиностроение, Ленингр. отделение, 1982. - 232 с. С.15], которое в принципе может быть использовано и для захвата труб. Устройство требует дополнения элементов, обеспечивающих введение его в отверстие и выведение из отверстия после операции захвата и транспортировки объекта на требуемую позицию, что на представленной в книге схеме не указано. Кроме того, шарнирное соединение захватно-зажимных элементов устройства без фиксации осей шарниров не обеспечивает надежного зацепления объекта.
Известно техническое решение, представленное упрощенный многозвенной схемой захвата-зажима объекта за внутренние поверхности [Челпанов И.Б., Колпашников С.Н. Схваты промышленных роботов. - Л.: Машиностроение. Ленингр. отделение, 1989. - 287 с. С.46. Рис.4.12о], которое в принципе также может быть применено для захвата труб за внутреннюю поверхность. Сложность исполнения многозвенной конструкции предопределяет снижение надежности ее работы.
Известно устройство - клиновой захват [Я.И.Оберман. Строповка грузов. Справочное издание М.: Металлургия, 1990. - 336 с. С.76, Рис.24а], работающий на принципе клинового эффекта. Устройство требует применения дополнительных конструктивных элементов и операций для заведения его в отверстие объекта и выведение его из отверстия после завершения операции захвата и транспортировки объекта. Кроме того, незафиксированные оси подвеса зажимных губок могут привести к их перекосом и ненадежности сцепления с поверхностью объекта.
Предлагаемое техническое решение устраняет указанные недостатки.
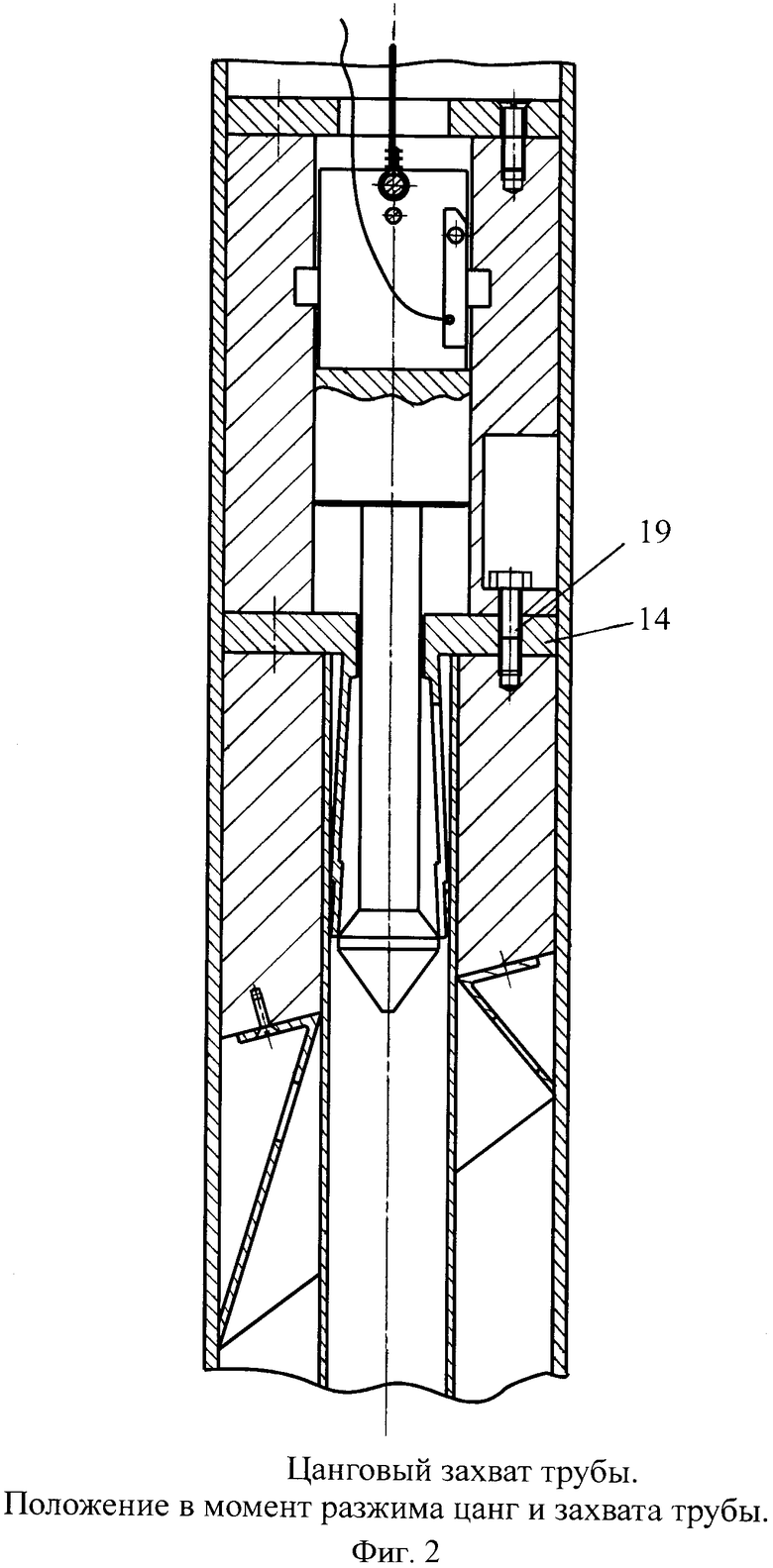
Устройство цангового захвата трубы в положении в момент опускания его на торец трубы представлено на фигуре 1.
Устройство представлено для извлечения объекта - трубы 18 из технологической трубы 1 и состоит из следующих элементов.
Корпус 2 устройства является цилиндром с центральным отверстием, в котором свободно перемещается ползун 12. Корпус 2 свободно перемещается в технологической трубе 1. К корпусу 2 присоединяется с помощью винтов 6 крышка 3 с отверстием для прохода каната настройки 4, присоединенного к планке несущей 10.
В ползуне 12 выполнен паз 7, в котором размещена планка несущая 10 и узел крепления каната несущего 5 к оси подвеса 8. В пазу 7 верхней части ползуна 12 установлены ось опорная 9 и ось 11, которые являются базовыми опорными для планки несущей 10.
Ползун 12 в нижней части соединен со стержнем 13 с помощью метрической резьбы с мелким шагом. Верхний конический элемент стержня 13 предназначен для разжима трех лепестков вставки цанговой 14, как показано в сечении А-А. Наружная поверхность цанг выполнена с выступающими шипами для внедрения во внутреннюю поверхность трубы 18.
Корпус 2 соединяется с основанием 15 конуса и вставкой 14 цанговой болтами 19 с мелкой резьбой, как показано на фигуре 2.
К основанию 15 конуса с помощью винтов 17 прикреплен конус 16 направляющий.
Форма конуса 16 определяется условиями обеспечения свободного ввода устройства в технологическую трубу 1 и обеспечения свободного входа трубы 18 в отверстие основания 15 конуса в случае, если труба 18 расположена не по оси трубы 1 технологической.
В положении, представленном на фигуре 1, устройство подвешено на канате несущем 5. Корпус 2 находится в подвешенном состоянии, которое обеспечивается тем, что планка несущая 10 передает опорные реакции на торцовую поверхность внутренней расточки ползуна и ось опорную 9. Канат настройки 4 в момент опускания устройства на торец трубы 18, ее захвата и подъема находится в свободном ненагруженном положении.
Устройство работает следующим образом.
Подвешенное на несущем канате 5 устройство опускается по вертикали в технологическую трубу 1. Объект захвата - труба 18 находится внизу. Вход в трубу обеспечивается скошенным направляющим конусом 16. Между наружными заостренными кромками конуса 16 и внутренней поверхностью трубы 1 имеется минимальный зазор, обеспечивающий свободное перемещение устройства, а внутренняя конусная поверхность конуса 16 служит направляющей для отклонения торца трубы 18 в случае ее касания стенки трубы технологической 1 и установки трубы 18 в вертикальное положение по оси трубы технологической 1 и свободного входа ее в отверстие основания конуса 15. При опускании устройства нижняя плоскость основания вставки цанговой 14 входит в контакт с торцом трубы 18, корпус 2 становится неподвижным, ползун 12 опускается ниже, входит в контакт с верхним основанием вставки 14 цанговой и становится неподвижным; при этом планка несущая 10 поворачивается под действием момента равнодействующей сил тяжести относительно оси 11 и занимает положение, указанное пунктирными линиями на фигуре 1.
При подъеме ползуна 12 коническая поверхность стержня 13 раздвигает лепестки цанги, которые входят в контакт с внутренней поверхностью трубы 18, как показано, на фигуре 2. Дальнейший подъем устройства происходит уже с объектом - трубой 18, причем чем тяжелее труба или больше сила сопротивления ее перемещению, тем больше усилие вдавливания шипованных лепестков цанг во внутреннюю поверхность трубы 18.
Разъединение устройства и объекта возможно только после фиксации объекта на заданной технологической позиции. При последующем опускании ползуна 12 и одновременном натяжении каната настройки 4 коническая поверхность стержня 13 выходит из контакта с лепестками цанги, лепестки под действием сил упругости возвращаются в исходное положение, а планка 10 под действием натяжения каната настройки 4 при совмещении высотного положения оси 11 и кольцевой выточки в ползуне 12 поворачивается в положение, показанное на фигуре 1. В таком положении осуществляется подъем устройства уже без объекта захвата.
Устройство готово к следующей операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКИЙ ЗАХВАТ УНИВЕРСАЛЬНОГО ГНЕЗДА | 2011 |
|
RU2481265C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТВС И ИЗДЕЛИЙ АКТИВНОЙ ЗОНЫ | 2015 |
|
RU2594286C1 |
| УСТРОЙСТВО ДЛЯ ГЕРМЕТИЗАЦИИ КОНТАКТНО-СТЫКОВОЙ СВАРКОЙ ТРУБЧАТЫХ ИЗДЕЛИЙ | 2003 |
|
RU2245769C2 |
| СПОСОБ УСТАНОВКИ И ЗАКРЕПЛЕНИЯ ПРЕДМЕТОВ В СКВАЖИНАХ И УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ И УСТАНОВКИ ПРЕДМЕТОВ В СКВАЖИНЕ (ВАРИАНТЫ) | 2004 |
|
RU2289673C2 |
| РАЗЪЕДИНИТЕЛЬ-СОЕДИНИТЕЛЬ ШАРИФОВА ДЛЯ ПАКЕРНОЙ УСТАНОВКИ СКВАЖИНЫ (ВАРИАНТЫ) | 2004 |
|
RU2289012C2 |
| Установка для разборки коленчатых валов | 1989 |
|
SU1712123A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Якорь | 2002 |
|
RU2223382C1 |
| Станок для сборки трубчатых теплообменников | 1977 |
|
SU657890A1 |
| Устройство для загибки колец на концах проводов или проволоки с закруткой | 1975 |
|
SU532439A1 |
Изобретение относится к области атомного машиностроения, к оборудованию для демонтажа радиоактивных объектов в виде труб. Устройство содержит цилиндрический корпус с центральным отверстием, в котором имеет возможность перемещаться ползун с пазом, в котором установлена планка несущая на оси, передающая усилие от силы тяжести устройства на несущей канат, опираясь на торцовую поверхность внутренней расточки корпуса и осъ опорную, установленную в пазу ползуна. Ползун с помощью резьбового соединения собран неподвижно со стержнем коническим, взаимодействующим с лепестками вставки цанговой, наружные поверхности которых выполнены с шипами, контактирующими с внутренней поверхностью объекта захвата - трубы. Устройство снабжено наклонным направляющим конусом, обеспечивающим свободный вход устройства в технологическую трубу и установку объекта захвата в вертикальное положение. При опускании устройства на торец объекта - трубу и ослабленном тросе настройки планка несущая поворачивается, освобождая ползун; движение устройства вверх приводит к разжиму лепестков вставки цанговой и в таком случае возможно только вместе с трубой. Изобретение позволяет упростить конструкцию и увеличить надежность сцепления с поверхностью объекта. 2 ил.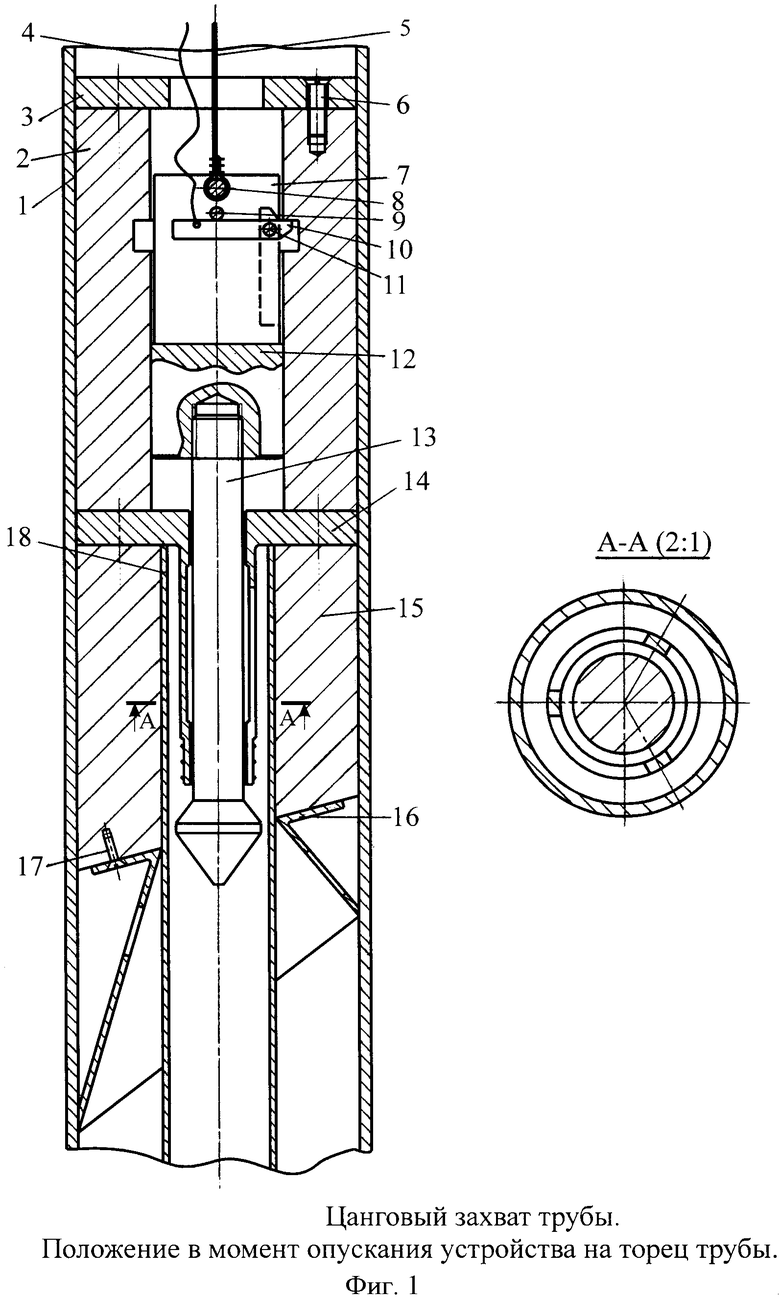
Цанговый захват трубы, содержащий цилиндрический корпус с центральным отверстием, крышку, канат настройки, канат несущий, винты крепления крышки, планку несущую, ползун с пазом, ось подвеса, ось опорную, ось планки несущей, стержень, вставку цанговую, основание конуса, конус направляющий с винтами, отличающийся тем, что
устройство, подвешенное на несущем канате, перемещается в технологической трубе под действием силы собственной тяжести, причем усилие на несущий канат передается от корпуса на несущую планку вследствие опорных реакций торцовой поверхности внутренней расточки корпуса и оси опорной, установленной в ползуне;
конус направляющий выполнен наклонным, обеспечивающим свободный вход устройства в технологическую трубу и установку объекта захвата - трубы - в вертикальное положение для свободного входа в центральное отверстие основания конуса;
операция захвата объекта - трубы - обеспечивается взаимодействием конической поверхности стержня с внутренними поверхностями лепестков цанг и взаимодействия наружных шипованных поверхностей лепестков цанги с внутренней поверхностью трубы.
| Захватное устройство для грузов с отверстиями инженеров п.м. и г.п.симоновых | 1974 |
|
SU563352A1 |
| Захватное устройство для изделий с отверстиями | 1984 |
|
SU1316971A1 |
| Скважинная труболовка | 1980 |
|
SU901471A1 |
| 0 |
|
SU168698A1 |

