Изобретение относится к станкостроению и может быть использовано для механизированного крепления инструмента на многооперационных и других станках с числовым программным управлением.
Цель изобретения - повышение точности базирования держателя на корпусе за счет последовательного геометрического замыкания базовых поверхностей.
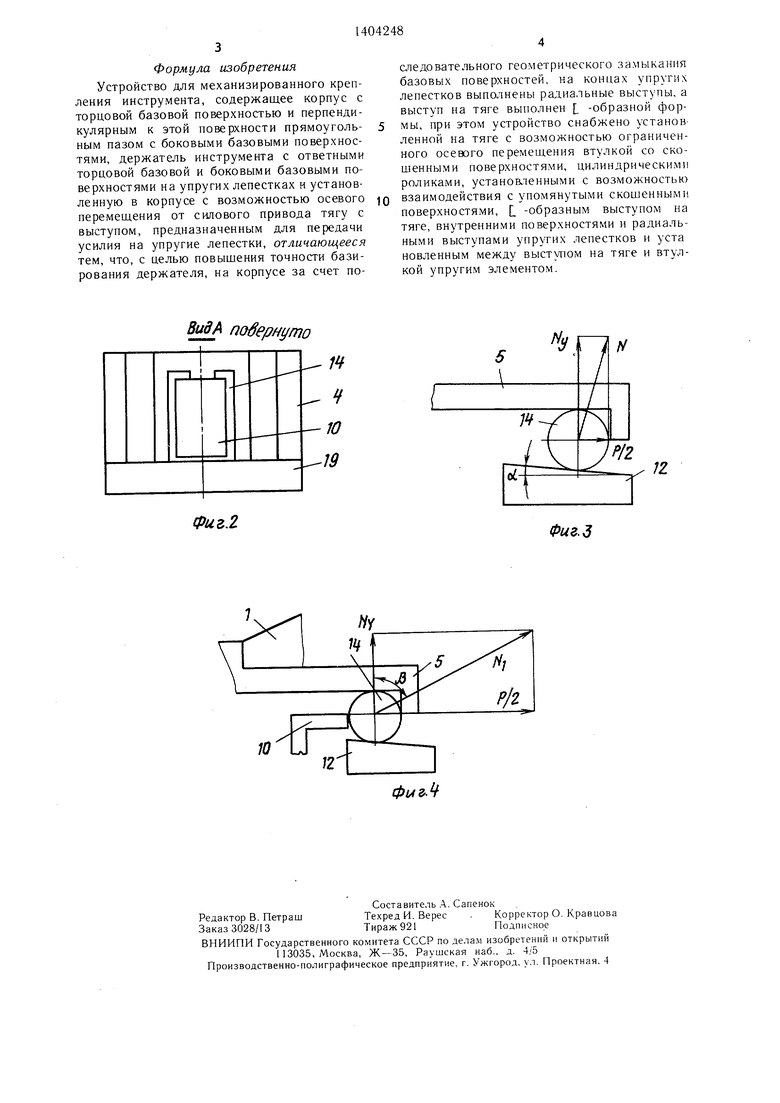
На фиг. 1 показано устройство, общий вид, продольный разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 и 4 - системы сил, действующих на держатель инструмента при последовательном геометрическом за.мыка; НИИ базовых поверхностей.
; Устройство содержит корпус 1 с торпо-
вой базовой поверхностью 2 и перпендикулярным к этой поверхности прямоугольным пазом с боковыми базовыми поверхностями
3. На держателе 4 инструмента имеются упругие лепестки 5 и ответные торцовая базо-
i вая поверхность 6 и боковые базовые поверхД1ости 7 на упругих э,лементах.
; В корпусе 1 установлена с возможностью
осевого перемещепия от гндронилипдра 8 тяга 9 с выступом 10 С -образной формы. На концах упругих ленестков выполнены ради-
:альные выступы 1 1. На тяге 9 установлена
:с возможностью ограниченного осевого перемещения втулка 12 со скошенными под .малым углом наклона к оси () поверхдгостями 13. Устройство снабжено цилиндри- чески.ми роликами 14, установленными с воз- .можностью взаи.модействия со скошенными
поверхностями 13, С -образным выступом 10 на тяге, внутренними поверхностями 15 упругих лепестков и их радиальными выступами 11. Ролики 14 прижимаются к поверхнос- тям 13 пружиной 16. Между выетугюм 10 тяги 9 и втулкой 12 установлен упругий элемент в виде пакета тарельчатых пружип 17. На тяге 9 выполнен кольцевой выступ 18, предназначенный для перемещения втулки 12 при разжиме держателя 4. В вертикаль- ном направлении держатель 4.фиксируется упором 19.
Устройство работает следующим образом. Зажим держателя 4 на корпусе 1 состоит из геометрического и силового замыкания базовых поверхностей 2, 6 и 3, 7. Геометрическое за.мыкание этих поверхностей осуществляется последовательно в два этапа. Первый этап - центрирование держателя относительно базовых поверхностей 3 паза корпуса в поперечном относительно оси устройства направлении. Держатель 4 вставляется в устройство своими упругими лепестками 5 в вертикально. направлении до упора 19 с зазором в поперечном направлении между базовы.ми поверхностями 7 .лепеетков и боковыми поверхностями 3 па- за. Подается давление в гидроцилиндр 8. Перемещаясь, поршень перемещает тягу 9
5
Q
5
Q
.5
i- 0
с, 0
0
(слева направо, фиг. I) последняя передает усилие через набор таре льчатых пружин 17 на втулку 12, которая, взаимодействзуя с роликами 14, перемещает их в поперечном направлении до каеания е внутренними поверхностями 15 упругих ленестков 5. Даль- нейп1ее перемещение втулки 12 приводит к упругой деформации лепестков 5 за .счет силы NY (фиг. 3). При этом сила Ny значительно превосходит осевую составляющую Р/2; Ну N-coSoL,
.sinc .
где N - сила нормального давления.
Упругие лепестки 5, деформируясь, выбирают зазор между базовыми поверхностями
7лепестков 5 и базовыми поверхностями 3 паза. Держатель 4 центрируете я в поперечном направлении до достижения положения равновесия, т.е. осуществляется геометрическое замыкание базовых поверхностей 3 и 7. Препятствуюц.1ая центрированию сила трения по поверхности 2
, где JU -коэффициент трения,
незначительна, так как сила Р мала и это уменьшает остаточную погрешность центрирования по сравнению с известным устройством, где угол с, не .может быть меныпе угла заклинивания (для стали ); фак- тичееки л ЗО-40° (в завиеимости от конструктивного исполнения, чтобы избежать заклинивания). Первый этап завершается моментом касания выступа 10 с роликами 14.
8этот .мо.мент происходит изменение направления зажимной еилы N,, действующей на упругие лепеетки 5, до
f,arcig{ -),
My
где Р - осевая сила.
На втором этапе геометрического замыкания резко увеличивается осевая еостав-. ляющая Р/2 и осуществляется геометрическое замыкание базовых поверхностей 2 и 6. Погрещноеть базирования определяется точностью изготовления поверхности 2.
Освобождение держателя 4 достигается обратным ходом поршня гидроцилиндра 8. При этом выступ 18 упирается в торец втулки 12 (наличие выступа 18 обеспечивает, кроме того, предварительный натяг пружин 17) и перемещает втулку. Пе|)е.мещение втулки освобождает ленестки 5 от усилия зажима, при этом заклинивание не происходит вследствие значительной разницы силы трения качения роликов 14 о поверхноеть 15 лепестков 5 и силы трения скольжения лепестков 5 о поверхность 3 при равенстве сил нормального давления. После освобождения лепеетков 5 держатель 4 может быть заменен.
Формула изобретения
Устройство для механизированного крепления инструмента, содержащее корпус с торцовой базовой поверхностью и перпендикулярным к этой поверхности прямоугольным пазом с боковыми базовыми поверхностями, держатель инструмента с ответными торцовой базовой и боковыми базовыми поверхностями на упругих лепестках и установленную в корпусе с возможностью осевого перемещения от силового привода тягу с выступом, предназначенным для передачи усилия на упругие лепестки, отличающееся тем, что, с целью повыщения точности базирования держателя, на корпусе за счет последовательного геометрического замыкания базовых поверхностей, на концах упругих лепестков выполнены радиальные выступы, а выступ на тяге выполнен L -образной формы, при этом устройство снабжено установленной на тяге с возможностью ограниченного осевого перемещения втулкой со скощенными поверхностями, цилиндрическими роликами, установ.1енными с возможностью
взаимодействия с упомянутыми скощенными поверхностями, . -образным выступом на тяге, внутренними поверхностями и радиальными выступами упругих лепестков и уста новленным между выступом на тяге и втулкой упругим элементом.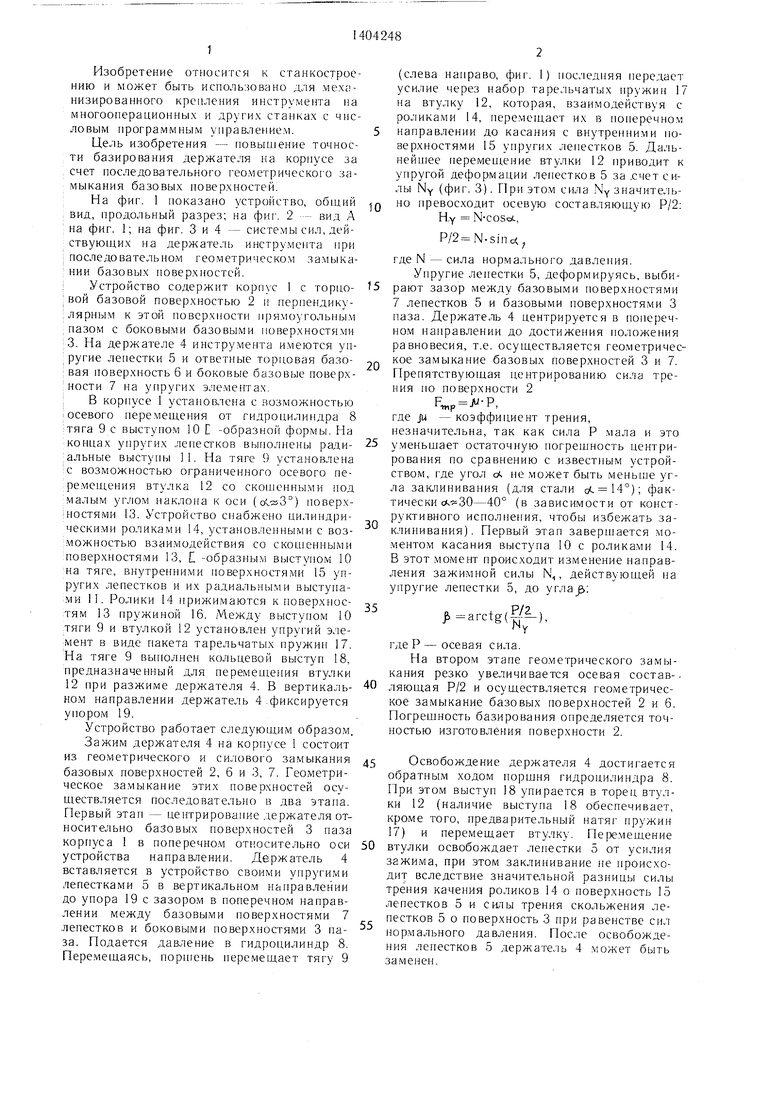
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки детали и устройство для его осуществления (варианты) | 2015 |
|
RU2639589C2 |
| Устройство для механизированного крепления держателя инструмента | 1990 |
|
SU1743788A1 |
| СПОСОБ УСТАНОВКИ ДЕТАЛИ ПО ПЛОСКОСТИ И ОТВЕРСТИЯМ | 2000 |
|
RU2201322C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ МОДУЛЕЙ | 1991 |
|
RU2050245C1 |
| Устройство для крепления держателя осевого инструмента к шпинделю станка | 1988 |
|
SU1713422A3 |
| Переменная коаксиальная нагрузка | 1989 |
|
SU1734145A1 |
| РАСТОЧНАЯ ГОЛОВКА | 1992 |
|
RU2014172C1 |
| МЕМБРАННЫЙ ПАТРОН ДЛЯ УСТАНОВКИ БЛОКА ШЕСТЕРЕН | 1997 |
|
RU2120356C1 |
| Устройство для закрепления изделия или инструмента для режущих станков | 1985 |
|
SU1382396A3 |
| СТАНОК ДЛЯ ФИНИШНОЙ ОБРАБОТКИ ДОРОЖЕК КАЧЕНИЯ КОЛЕЦ РОЛИКОПОДШИПНИКОВ | 1999 |
|
RU2189302C2 |
Изобретение относится к станкостроению и может быть использовано для механизированного крепления инструмента на многооперационных и других станках с числовым программным управлением. Целью изобретения является повышение точности базирования инструмента за счет последовательного геометрического замыкания базовых поверхностей держателя. Устройстве содержит корпус 1 с базовыми поверхностями 2 и 3 и держатель 4 инструмента с упругими лепестками 5 и ответными базовыми поверхностями 6 и 7. На тяге 9, связанной с приводом ее перемещения, установлена втулка 12 со скошенными поверхностями 13, 15 /7 взаимодействуюш,ими с роликами 14. На тяге выполнен выступ 10 -образной формы, а на упругих лепестках 5 - радиальные выступы 11. Между выступом 10 и втулкой 12 установлен пакет тарельчатых пружин 17. Зажим держателя 4 на корпусе 1 происходит за счет геометрического и силового замыкания базовых поверхностей. Геометрическое замыкание этих поверхностей осуществляется в два этапа. При перемещении тяги 9 она через пакет тарельчатых пружин перемещает втулку 12, а последняя через ролики 14 со скошенными поверхностями 13 деформирует упругие лепестки держателя, осуществляя геометрическое замыкание базовых поверхностей 3 и 7. При взаимодействии выступа 10 с роликами наступает второй этап, при котором осуществляется геометрическое замыкание базовых поверхностей 2 и 6. Такая последовательность геометрического замыкания базовь1х поверхностей уменьшает погрешности, вызванные силами трения при одновременном геометрическом замыкании по всем базовым поверхностям, что повышает точность базирования держателя инструмента на корпусе. 4 ил. s. (Л / ;; о 4 tsD 4; оо
SuffA повернуто
Фиг.2
Ю
12
У
/2
Фиг.З
| Способ закрепления осадка магнитной суспензии при дефектоскопировании изделий по методу намагничивания | 1938 |
|
SU55998A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
