Изобретение относится к области подъемно-транспортной техники, а именно - к вакуумным грузоподъемным устройствам, предназначено для захвата, подъема и транспортирования штучных грузов различных габаритов с плоской поверхностью, в том числе изделий с центральным отверстием, и является усовершенствованием устройства по авт. св. № 1105438.
Цель изобретения - повышение надежности работы путем исключения подъема при натечках, превышаюш,их допустимые.
На чертеже схематично показан вакуумный захват, общий вид.
Вакуумный захват состоит из полого жесткого корпуса 1, соединенного с уплотнением 2 и эластичной кольцевой диафрагмой 3, разделяющей полость корпуса на поддиафрагменную полость А, наддиа- фрагменную камеру Б и периферийную поддиафрагменную полость В.
Поддиафрагменная полость А сообщена через полый центральный штуцер 4 и запорный вентиль 5 с коллектором 6, соединенным через запорный вентиль 7 с источником вакуума и через запорный вентиль 8 - с атмосферой.
В наддиафрагменной камере Б, сообщающейся посредством запорного вентиля 9 с полостью центрального штуцера 4, установлены упругие в вертикальном направлении элементы 10 (пружины).
Периферийная поддиафрагменная полость В сообщена с коллектором 6 посредством запорного вентиля 11, с наддиафрагменной камерой Б посредством регулируемого дросселя 12 и запорного вентиля 13 с датчиком 14 вакуума, связанного электрически (или кинематически) с запорным вентилем 11. В схеме предусмотрено реле 15 для передачи сигнала датчика 14 вакуума на другие элементы системы управления грузоподъемного механизма.
Захват работает следующим образом.
При транспортировании малогабаритных грузов все запорные вентили после сообщения с атмоферой полостей и камер закрывают и устанавливают устройство на поверхность транспортируемого груза. В таком положении уплотнительный пояс Г диафрагмы 3 под действием массы устройства и усилий, развиваемых упругими элементами 10, а также за счет сопротивления воздуха, находящегося в замкнутой наддиафрагменной камере Б под атмосферным Давлением, герметизирует стык груза с поясом Г диафрагмы 3 и образует замкнутую камеру А. После этого открывают запорные вентили 7 и 5, сообщают через коллектор 6 и полость центрального.штуцера 4 камеру А с источником вакуума. Устройство под действием разности давлений внутри и снаружи камеры А присасывается к транспортируемому грузу.
Разгерметизация камеры А (отпуск груза) осуществляется соединением ее с атмосферой, для чего закрывают запорный вентиль 7 и открывают запорный вентиль 8.
В дальнейшем при работе с малогабаритным грузом запорный вентиль 5 остается открытым и все управление ведется запорными вентилями 7 и 8.
При транспортировании грузов с центральным сквозным отверстием захват в исходном положении (как и для транспортирования малогабаритных грузов) устанавливают на поверхность груза из расчета охвата площади сквозного отверстия уплотни- тельной поверхностью Г диафрагмы 3. Под
5 действием массы устройства и упругих элементов 10, размещенных в наддиафрагменной камере. Б, опорные поверхности уплотнения 2 корпуса 1 и Г диафрагмы 3 входят в контакт с поверхностью груза, образуя замкнутую периферийную поддиафрагмен- ную камеру В. Эту камеру через запорные вентили 11 и 7 сообщают с источником вакуума.
В результате разности давлений внутри и снаружи камеры В захват присасывается
5 к грузу. Разгерметизация захвата (отпуск груза) осуществляется соединением камеры В с атмосферой, для чего закрывают запорный вентиль 7 и открывают запорный вентиль 8.
В дальнейшем при повторении опера0 ций по транспортированию грузов с центральным сквозным отверстием запорный вентиль 11 остается открытым и все управление ведется запорными вентилями 7 и 8. Для транспортирования крупногабаритных грузов вакуумный захват подготавли
вают к работе следующим образом. Регули5
руемый дроссель и датчик вакуума устанавливают в заданные положения, определяемые условиями предстояшей работы в зависимости от параметров вакуумной сис0 темы и состояния поверхности транспортируемого груза (данные для настройки определяются расчетом при проектировании устройства или экспериментальным путем и приводятся в паспорте вакуумного захвата) . Запорные вентили 5, 9 и 13 открывают, а запорные вентили 7, 8 и 11 закрывают. В таком положении захват устанавливают на поверхность транспортируемого груза, при этом уплотнительный пояс Г диафрагмы 3 и уплотнение 2 корпуса 1 под
0 действием массы устройства входят в контакт с поверхностью груза и образуют с ней замкнутые камеры А и В. Открывают запорный вентиль 7, сообщая те.м самым все камеры с источником вакуума. Вследствие различных проходных сечений каналов и ра5 бочих объемов камер А, Б и В процесс изменения давления в них происходит.неодинаково. Наибольшая разность давлений в первую очередь устанавливается в поддиафрагменной камере А, в результате чего возникают усилия, прижимающие корпус 1 и уплотнение 2 к поверхности груза.
Последовательно разность давлений увеличивается в наддиафрагменной камере Б и в периферийной поддиафрагменной камере В, в результате чего увеличиваются усилия, прижимающие корпус 1 и уплотнение 2 к грузу. При достижении установленного значения вакуума в камере В датчик 14 вакуума срабатывает, автоматически открывает запорный вентиль 11, сообщая камеру В с источником вакуума, и через реле 15 дает сигнал, разрешающий подъем груза.
Разгерметизация камеры В и всего захвата (отпуск груза) осуществляется соединением всех камер с атмосферой, для чего закрывают запорный вентиль 7 и открывают запорный вентиль 8. Запорный вентиль 11 в этот момент закрывается автоматически, взаимодействуя с датчиком 14 вакуума.
При повторных операциях по транспортированию крупногабаритных грузов управление ведется запорными вентилями 7 и 8.
Значение вакуума в периферийной поддиафрагменной камере В зависит от нате- чек через неплотности стыка груза с уплотнением 2 и установленного проходного сечения регулируемого дросселя 12. Если неплотности, а следовательно, и натечки воздуха, в камере В не превыщают допустимых значений, то вакуум в камере В вызывает срабатывание датчика 14 вакуума, который воздействует на запорный вентиль 11, открывая его. Интенсивность вакууми- рования камеры В возрастает, в результате чего захват присасывается к грузу в условиях, гарантирующих надежность удержания последнего при подъеме и транспортировании.
Если натечки в камере В превыщают допустимые значения, то разности давлений, необходимой для срабатывания датчика вакуума, достигнуто не будет и запорный вентиль 11 останется закрытым, т. е. сигнал, разрещающий подъем груза, не поступает.
Предлагаемое выполнение захвата обеспечивает возможность в процессе транспортирования достигать наибольщих начальных контактных напряжений в местах стыка уплотнения 2 корпуса 1 с поверхности груза, что необходимо в условиях транспортирова- , ния крупногабаритных грузов, поверхность которых имеет повыщенную кривизну или волнистость. Для таких условий эластичная кольцевая диафрагма выполняется из расчета обеспечения превышения усилий, направленных вдоль оси корпуса, над предель ной удерживающей способностью поддиафрагменной полости при заданных значениях вакуума в системе.
Конструктивно это условие достигается путем соответствующего размещения мест
5 соединения диафрагмы 3 с корпусом 1, формой и размерами диафрагмы 3, уплотнения Г, упругих элементов 10 и подвижных частей, размещенных в наддиафрагменной камере Б. Процесс работы такого устройства аналогичен описанному процессу транс0 портирования крупногабаритных грузов. Различие состоит в том, что при вакууми- ровании камер А, Б и В наступает момент, когда кольцевая диафрагма 3 под действием разности давлений внутри и снаружи под5 диафрагменной камеры Б, перемещаясь в сторону корпуса вдоль его оси, развивает усилие, превышающие усилия, удерживающие диафрагму 3 на поверхности груза разностью давлений в поддиафрагменной камере А, а также усилия, препятствующие пере0 мещению диафрагмы в сторону корпуса - упругих элементов 10 и массы подвижных частей устройства, размещенных в камере Б. При определенных значениях вакуума в камерах наступает раскрытие стыка уплотнения Г диафрагмы 3 с грузом, в результа5 те чего давления в камерах А и В выравниваются, а так как в камере А разность давлений в начальный момент вакуумирования больше, чем в камере В, то в момент раскрытия стыка камера В с корпусом 1 и уп0 лотнением 2 воспринимает импульсную нагрузку, которая увеличивает контактные напряжения в местах стыка уплотнения 2 с грузом, чем обеспечивается улучшение уп- лотнительной способности захвата и повышение надежности работы.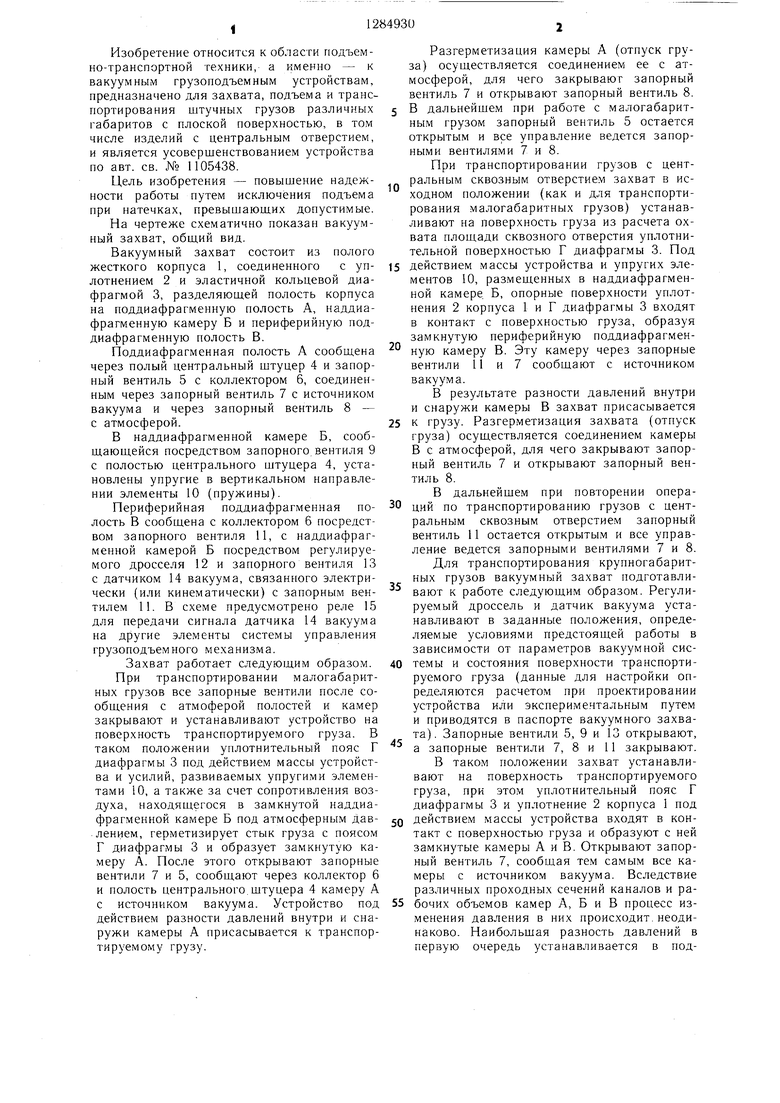
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1992 |
|
RU2050255C1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумный захват | 1986 |
|
SU1393635A1 |
| Вакуумный захват | 1984 |
|
SU1152910A2 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1263607A1 |
| Однокамерный насос замещения | 1972 |
|
SU443205A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
