Изобретение относится к автоматике и может быть использовано для создания аппаратуры, служащей для предотвращения столкновений и наездов автомобилей и других транспортных средств.
Известно множество способов и устройств, предназначенных для предотвращения столкновений автомобилей и основанных на разных принципах измерения расстояния до опасного предмета и сравнении этого расстояния с предельным.
Известен ультразвуковой дальномер, в котором расстояние определяется через временную задержку между моментами излучения и приема отраженного УЗ-импульса [1] По результатам сравнения этого расстояния с опасным пределом, зависящим от скорости, вырабатывается сигнал водителю или команда на торможение. Устройство обладает недостаточной дальностью, что связано с трудностями эффективного излучения и приема ультразвука в воздухе.
Известна миллиметровая РЛС для использования на автомобилях (см. Радиотехника N 10, 1989, мат. 10В71). При мощности передатчика 30 мВТ обеспечивается дальность обнаружения до 60 м. Недостатком этого устройства, как и всех вообще автомобильных локаторов, является неустойчивость к воздействию зондирующих импульсов встречных автомобилей, оснащенных такими же устройствами. При массовом применении это приводит к функциональной ненадежности.
Наиболее близкими по технической сущности к предлагаемому изобретению являются способ и устройство для предотвращения столкновений автомобиля [2]
Способ основан на том, что в нем воспринимают с помощью разнесенных приемников оптическое излучение предметов, находящихся в опасной зоне, преобразуют его в электрические сигналы на линейных оптико-электронных преобразователях и по взаимному расположению возбужденных элементов относительно центров линеек путем несложных геометрических преобразований определяют расстояние l до автомобиля. Сравнивая расстояние l с допустимым расстоянием L, вычисленным с учетом скорости автомобиля, вырабатывают сигнал тревоги или команду на торможение, если l≅L.
Аппаратура для осуществления этого способа содержит первый и второй оптико-электронные преобразователи, в каждый из которых входит оптический элемент (объектив), бленда и линейка из n чувствительных элементов, первый и второй коммутаторы-определители координат и микрокомпьютер. Линейки чувствительных элементов располагаются горизонтально и перпендикулярно направлению движения автомобиля. Рабочая оптическая зона ограничивается блендами. Если перед автомобилем оказывается потенциальное препятствие, то объективы проектируют его изображение на чувствительные элементы преобразователей, находящиеся на расстояниях а1 и b1 от центров линеек. Координаты а1 и b1 с помощью определителей координат, у которых срабатывают соответствующие пороговые элементы, передаются в микрокомпьютер. Последний, используя также заложенные в его память расстояния а, b и f, с помощью простых геометрических преобразований определяет координату l1 препятствия. Сравнивая ее с допустимым расстоянием L, микрокомпьютер, если l1≅L, вырабатывает предупредительный сигнал водителю или команду на торможение. При выборе L учитывается скорость автомобиля.
Достоинствами такой аппаратуры является экологическая безопасность вследствие пассивного принципа действия, а также устойчивость к встречному транспорту, оснащенному аналогичной аппаратурой (если выключен свет фар). Однако она может работать только с точечными одиночными препятствиями. Если перед автомобилем окажется еще одно препятствие, то микрокомпьютер получит четыре равноправные координаты а1, b1, a2, b2.
Комбинация координат а1 и b2 создает ложное препятствие с координатой l0, расположенное ближе истинных препятствий (l0 < l2 < l1). Поскольку l0 < L, будет выработана ложная тревога. В реальной обстановке даже один идущий достаточно близко и впереди автомобиль отображается на преобразователях множеством координат, поскольку он представляет довольно широкое объемное тело. Тем более это верно, когда на дороге много транспортных средств и других препятствий. Множество координат создадут соответственно много ложных целей, расположенных ближе истинных препятствий. Это будет приводить к ложным тревогам, т. е. к функциональной ненадежности, что является недостатком известной аппараратуры. С другой стороны, узкая конусовидная направленность зон приема, определяемая предельной дистанцией и шириной опасной зоны 2r, создает области, где координаты будут получены лишь одним преобразователем 5, а также область, где ни один преобразователь не воспримет препятствия. Опасные препятствия, внезапно появившиеся в этих областях, не будут выявлены, что усугубляет функциональную ненадежность. В ночное время выбранный диапазон световых волн (0,4-10 мкм) делает систему беззащитной перед ослеплением светом фар встречных автомобилей. При покачиваниях автомобиля во время движения на преобразователи будут периодически попадать изображения участков поверхности дороги, которые будут восприниматься, как препятствия. Все это снижает функциональную надежность известных способа и устройства.
Цель заключается в том, чтобы увеличить функциональную надежность. Это достигается тем, что способ для предотвращения столкновений автомобиля, основанный на приеме оптического излучения предметов, находящихся в опасной зоне, преобразовании его в электрические сигналы, определении по ним расстояния l до препятствия, сравнении его с допустимым расстоянием L, определяемым с учетом скорости, и выработке предупредительного сигнала или команды на торможение в случае l ≅L, включает новые операции, а именно: принимаемое оптическое излучение фильтруют, подавляя диапазон с длиной волн менее 3 мкм, прием и преобразование ведут отдельно для n участков, расположенных один за другим в опасной зоне, при этом коэффициенты преобразования выбирают так, что при отсутствии препятствий сигналы от всех участков одинаковы, по разности электрических сигналов с соседних участков судят о наличии препятствия на этих участках, из всех участков с обнаруженными препятствиями выбирают ближний к автомобилю и дистанцию до него принимают в качестве расстояния l.
В устройство для предотвращения столкновений автомобиля, содержащее оптико-электронный преобразователь, включаю- щий оптический фокусирующий элемент, n чувствительных элементов и бленду, коммутатор-определитель координат, соединенный последовательно через 1-й вход блока определения опасного расстояния с генератором сигнала тревоги, содержащим генератор звуковых сигналов, схему ИЛИ и динамик, при этом 2-й вход микропроцессора связан с датчиком скорости, введены оптический фильтр, подавляющий излучения с длиной волн менее 3 мкм, теплоизоляция, закрывающая оптико-электронный преобразователь со всех направлений, кроме направления приема, n добавочных сопротивлений, соединенных соответственно с n чувствительными элементами, параллельно подсоединенными своими свободными концами к одному выходу источника питания, к другому выходу которого параллельно подсоединены свободные концы добавочных сопротивлений, и (n 1) дифференциальных усилителей, первый вход 1-го и второй вход (n 1)-го из которых связаны соответственно с общими точками первых и n-х чувствительных элементов и добавочных сопротивлений, вторые входы нечетных дифференциальных усилителей, исключая (n 1)-й, и 1-е входы четных попарно подсоединены, соответственно, к общим точкам таких же четных чувствительных элементов и добавочных сопротивлений, вторые входы четных и 1-е входы нечетных усилителей, исключая 1-й, попарно подключены к общим точкам таких же нечетных чувствительных элементов и добавочных сопротивлений, а выходы дифференциальных усилителей связаны с соответствующими входами коммутатора-определителя координат, при этом один из чувствительных элементов расположен в фокусе оптического элемента, а остальные размещены один над другим выше фокуса.
Предусмотрены варианты устройства, в которых:
а) в генератор сигнала тревоги введен синтезатор речи, соединенный своим входом с 2-м выходом микропроцессора, а выходом с 2-м входом схемы ИЛИ;
б) оптический фокусирующий элемент выполнен в виде зеркала, например, гиперболической формы.
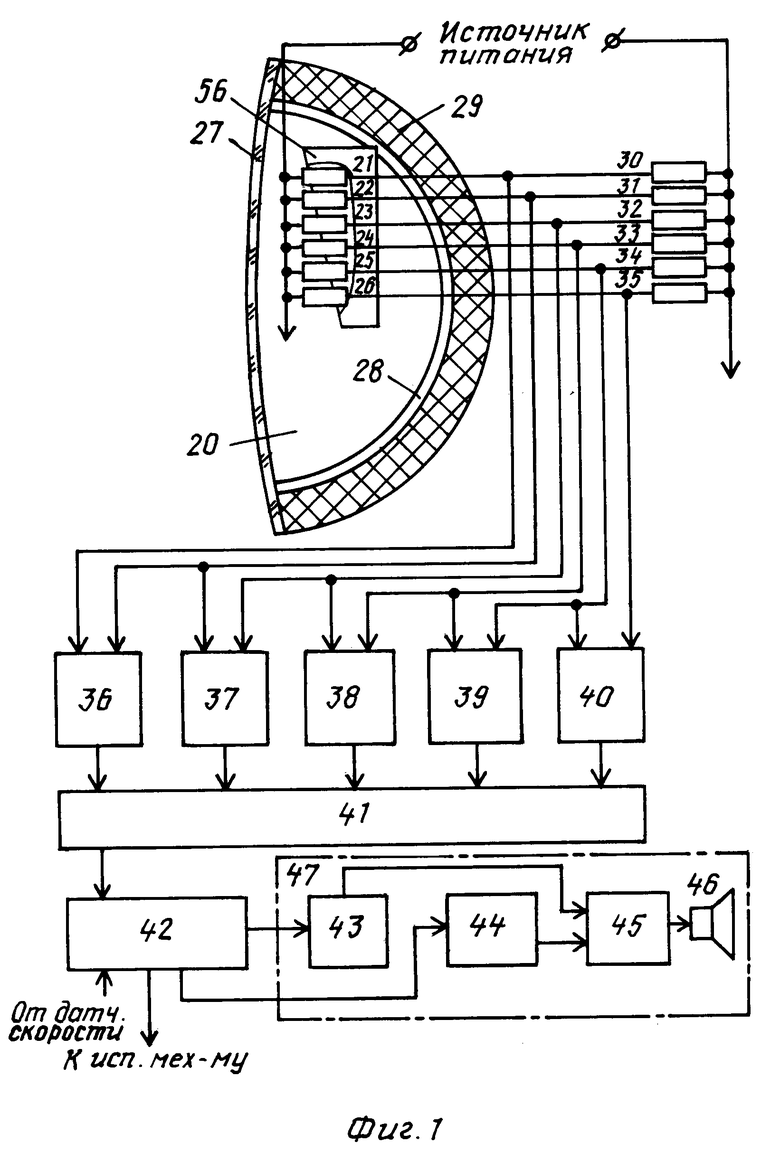
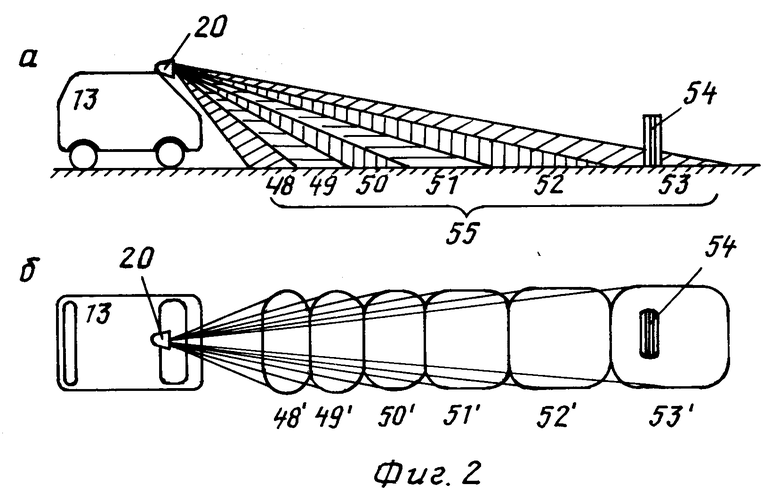
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 расположение участков приема в опасной зоне; на фиг. 3 эпюры напряжений. Пример соответствует n 6.
Устройство содержит оптико-электронный преобразователь 20, в который входят первый, второй.шестой чувствительные элементы 21, 22.26, оптический фильтр 27, гиперболическое (или иной формы) зеркало 28 и бленда 56, теплоизоляцию 29, первое, второе.шестое дополнительные сопротивления 30, 31.35, первый, второй.пятый дифференциальные усилители 36, 37.40, коммутатор-определитель координат 41, блок определения опасного расстояния 42, генератор сигнала тревоги 47, включающий генератор звукового сигнала 43, синтезатор речи 44, схему ИЛИ 45 и динамик 46. Второй вход блока 42 соединен с выходом датчика скорости.
Оптико-электронный преобразователь 20 устанавливается по оси опасной зоны, т. е. если спереди то в центре над ветровым стеклом или между фарами, если сзади то в центре над задним стеклом или между габаритными фонарями и т.п.
Устройство работает следующим образом.
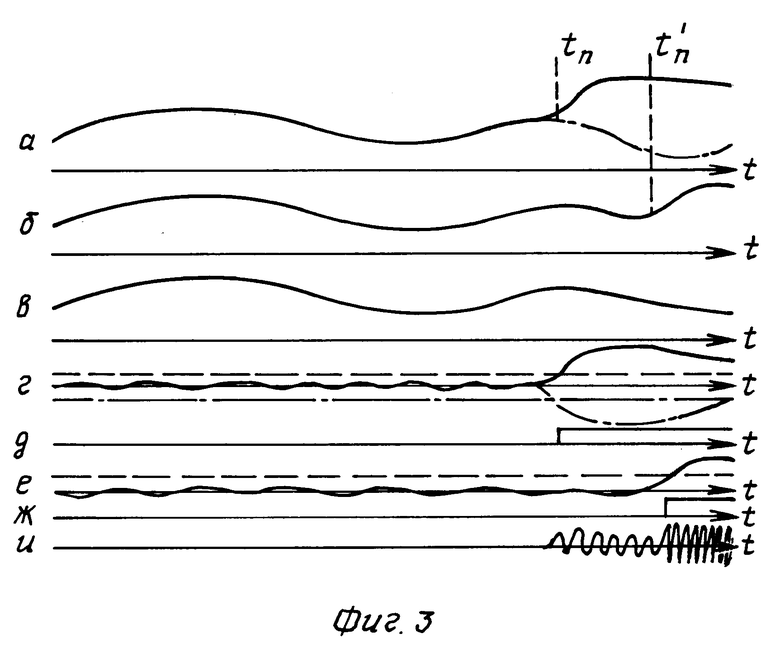
Известно, что все тела, имеющие температуру выше 0 К, характеризуются оптическим излучением. При рабочих температурах от -50 до +50оС максимум излучения находится в пределах примерно 13-9 мкм. Учитывая, что на дорогах встречаются и более нагретые тела, нижняя граница выбирается с некоторым запасом, например 3 мкм. Оптическое излучение находящихся в опасной зоне предметов, в том числе отраженное, принимается оптико-электронным преобразователем 20, при этом излучение с длинами волн менее 3 мкм отсекается оптическим фильтром 27. Подобно тому, как в автомобильной фаре расположение нитей накала осветительных ламп в разных точках (в фокусе и выше фокуса) гиперболического зеркала создает освещенность в разных местах дороги (дальний свет, ближний свет и т.п.), так и в преобразователе 20 чувствительные элементы 21, 22.26, из которых элемент 26 размещен в фокусе, а остальные один над другим выше фокуса гиперболического зеркала 28, воспринимают излучение от разных участков 48, 49,53 опасной зоны 55 (см. фиг. 2). На фиг. 2а треугольники 48, 49.53 с общей точкой в районе преобразователя 20 характеризуют эти участки при виде сбоку, а на фиг. 2б при виде сверху, причем овалы 48'.53' соответствуют местам на полотне дороги, с которых непосредственно воспринимается оптическое излучение. Излишние участки отсекаются блендой 56. Чем ближе к фокусу зеркала оптический элемент, тем меньше наклон участка приема, и тем дальше расположен соответствующий овал. Чувствительному элементу 26, расположенному в фокусе, соответствует наиболее дальние участок опасной зоны 53 и овал 53', а элементу 21 ближние участок 48 и овал 48'. Расположение зоны 53 определяется наклоном самого зеркала. Поступающее на оптические элементы 21.26 оптическое ИК-излучение нагревает эти элементы и меняет их сопротивление. При движении автомобиль покачивается в продольном направлении, угол приема излучения с полотна дороги также меняется во времени, а с ним вместе и принимаемая мощность. К этому же приводят неоднородности профиля дороги. В результате потенциал в общей точке, например, между шестым сопротивлением 35 и чувствительным элементом 26 изменяется во времени даже при отсутствии препятствия (см. фиг.3,а). Однако практически так же меняется и потенциал в параллельной ветви, в точке между сопротивлением 34 и чувствительным элементом 25 (см. фиг. 4,б). При настройке аппаратуры в условиях, имитирующих отсутствие препятствий, сопротивления 34 и 35 подобраны так, что потенциалы на фиг. 3а и 3б изменяются практически одинаково и в рабочей обстановке, если нет препятствий. Поэтому разностный потенциал, поступающий на вход 5-го усилителя 40, близок нулю (см. фиг. 3,г). Соответственно при отсутствии препятствий не срабатывают пороговые элементы коммутатора-определителя координат 41 и на блок определения опасного расстояния 42 не выдаются координаты участков. Однако при появлении на 6-м участке 53 препятствия 54 с учетом движения автомобиля 13 в момент tn возникает изменение потенциала в общей точке элемента 26 и сопротивления 35 (см. фиг. 3,а). Поскольку в этот момент препятствие 54 еще не находится в зоне действия соседнего 5-го участка приема, потенциал в общей точке элемента 25 и сопротивления 34 ведет себя, как и ранее (см. фиг. 3,б). В результате на выходе 5-го дифференциального усилителя 50 после момента tn появляется импульс (см. фиг. 3,г), превышающий пороговый потенциал (пунктир на фиг. 3,г) коммутатора-определителя координат 41, последний срабатывает и выдает код, соответствующий 6-му участку, на блок 42, который сравнивает расстояние, соответствующее этому участку (l6) с допустимым расстоянием L, вычисленным с учетом скорости, и в случае l6 ≅L выдает команду на генератор звукового сигнала 43, чей выходной сигнал (см. фиг. 3, и) через схему ИЛИ 45 проходит на динамик 46. Если по этому звуковому сигналу водитель не притормозил и препятствие 54 продолжает приближаться, то в момент tn' оно оказывается на 5-м участке 52, и в общей точке пятых чувствительного элемента 25 и сопротивления 34 увеличится потенциал (см. фиг. 3,б в момент tn'). В результате сравнения его с потенциалом в 4-й общей точке элемента 24 и сопротивления 33 (см. фиг. 3,в) на выходе 4-го усилителя 39 образуется импульс (см. фиг. 3,е), который опознается коммутатором-определителем координат 41, а блок 42 получает код 5-го участка, на котором обнаружено препятствие. Поскольку это препятствие ближе, чем ранее обнаруженное, то при сохранении сигнала 6-го участка 52 и выполнении условия l6 ≅L блок 42 дает команду генератору 43 усилить величину звукового сигнала (см. фиг. 3, и). В принципе может включаться и автоматическое торможение. Может также меняться частота звука. Если же к этому времени l6 > L, a l5≅L (водитель снизил скорость, но недостаточно), то громкость звука устанавливается, как для момента tn. Если препятствия обнаружены одновременно на нескольких участках, то блок 42 выбирает из них ближайший к автомобилю и сравнивает расстояние до него li с допустимым расстоянием L.
Тональный звук может сопровождаться речевым сигналом, вырабатываемым синтезатором речи 44 по коду (номеру) участка, поступающему от блока 42 и отражающему примерное расстояние до ближнего препятствия (участка) в метрах, например "Сорок". Если автомобиль оборудован несколькими устройствами для предупреждения столкновений с разных направлений, то динамики 46 устанавливаются в разных местах кабины спереди, сзади, слева или справа от водителя в соответствии с направлением контроля, а синтезатор речевого сигнала указывает и расстояние, и направление, например, "Прямо, шестьдесят", или "Сзади, двадцать". Препятствия могут быть и более, и менее нагретыми по сравнению с фоном. Последнему случаю соответствует уменьшение потенциала и отрицательный импульс на выходе усилителей (см. штрихпунктир в момент tn на фиг. 3,а,б,г). Это несколько усложняет функции коммутатора-определителя координат 41, так как в нем предусматривается сравнение как на "плюс", так и на "минус" (см. штрихпунктирный порог сравнения на фиг. 4,г), но делает устройство более универсальным.
Предлагаемое устройство может быть выполнено с помощью известных элементов и материалов. В качестве оптического элемента может быть использовано гиперболическое (или иной формы) зеркало от автомобильных осветительных фар, в качестве чувствительных элементов болометры, термосопротивления, кремниевые диоды и другие малоинерционные элементы, обычно используемые при динамических измерениях температур или тепловых потоков. Оптический фильтр может быть сделан на основе халькогенидных стекол серии ИКС. В качестве блока 42 могут быть использованы либо существующие микропроцессоры, работающие по логике универсальной ЭВМ, либо специализированные процессоры, построенные сугубо для этих целей.
В качестве синтезатора речи может быть применено известное дешевое устройство "говорящая реклама". Для остальных элементов могут использоваться серийные микросхемы и другие электрорадиоэлементы.
Выбор для работы дальнего ИК-диапазона с помощью оптического фильтра 27 позволяет нейтрализовать "ослепление" устройства светом фар встречных автомобилей, излучение которых лежит в диапазоне волн, меньших 3 мкм (более длинноволновое излучение не пропускается их защитным стеклом и стеклом лампы). Излучение солнца с длиной волн более 3 мкм также хорошо задерживается верхними слоями земной атмосферы. В диапазоне, например, от 8 до 14 мкм лежит относительно "гладкая" характеристика прохождения ИК-излучения в приемной атмосфере, свободная от "провалов" проницаемости из-за действия газов СО, СО2, водяного пара Н2О и др. Это обеспечивает устойчивый прием ИК-сигналов в тумане, в условиях задымления и т.д.
Расположение чувствительных элементов 21.26 в фокусе и выше фокуса оптического элемента (гиперболического зеркала) 28, одного над другим, позволяет четко относить препятствия к тому или иному участку опасной зоны и избежать неоднозначности определения дистанции в случае неточечных и неодиночных препятствий, как в прототипе. Разностный метод оценки наличия или отсутствия препятствий, осуществляемый с помощью дифференциальных усилителей 36.40, соответствующего подключения чувствительных элементов 21.26 и подбора добавочных сопротивлений 30.35, позволяет избежать ложных тревог из-за продольных покачиваний автомобиля. Этот же метод в сочетании с теплоизоляцией 29 снижает влияние изменений наружной температуры. Усиление звукового сигнала в случае приближения препятствия, находящегося в пределах недопустимой дистанции, способствует более быстрой реакции водителя. Речевое сопровождение указывает водителю на местонахождение препятствия, не отвлекая его от наблюдения за дорогой. В целом все вновь введенные признаки увеличивают функциональную надежность способа и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2411541C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| ПЬЕЗООПТИЧЕСКИЙ ПРОБЛЕСКОВЫЙ ИЗВЕЩАТЕЛЬ | 2005 |
|
RU2281618C1 |
| ПЬЕЗООПТИЧЕСКИЙ ИЗВЕЩАТЕЛЬ | 2004 |
|
RU2257688C1 |
| ОПТИЧЕСКИЙ ИЗВЕЩАТЕЛЬ | 2003 |
|
RU2246885C1 |
| Устройство для предотвращения столкновений транспортного средства | 1974 |
|
SU516089A1 |
| Способ управления движением транспортных средств | 1990 |
|
SU1837351A1 |
| ЛЕГКОВОЙ АВТОМОБИЛЬ | 1999 |
|
RU2192357C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ | 1990 |
|
RU2022367C1 |
Использование: аппаратура для предотвращения столкновений транспортных средств. Сущность изобретения: способ заключается в том, что принимают, фильтруют и преобразовывают оптическое излучение отдельно от n участков, расположенных один за другим в опасной зоне, причем по разности сигналов от соседних участков судят о наличии на них препятствий. Устройство содержит оптико-электронный преобразователь, включающий оптический элемент, оптический фильтр и чувствительные элементы, добавочные сопротивления, дифференциальные усилители, коммутатор, блок определения опасного расстояния и генератор сигналов тревоги. 2 с. и 1 з. п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ N 3642196, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
