Изобретение относится к системам автоматики с использованием собственного излучения объектов и может быть использовано для создания аппаратуры, служащей для предотвращения столкновений транспортных средств.
Известен способ для предотвращения столкновений автомобилей, основанный на приеме оптического излучения предметов, находящихся в опасной зоне, преобразовании его в электрические сигналы, определении по ним расстояния до препятствия, сравнении его с допустимым расстоянием, определяемым с учетом скорости, и выработке предупредительного сигнала или команды на торможение в случае, когда текущее расстояние меньше допустимого, причем принимаемое оптическое излучение фильтруют, подавляя диапазон с длиной волн менее 3 мкм, прием и преобразование ведут отдельно для n участков, расположенных один за другим в опасной зоне, при этом коэффициенты преобразования выбирают так, что при отсутствии препятствий сигналы от всех участков одинаковы, по разности электрических сигналов с соседних участков судят о наличии препятствия на этих участках, из всех участков с обнаруженными препятствиями выбирают ближний к автомобилю и дистанцию до него принимают в качестве текущего расстояния (патент РФ №2050561, кл. G01S 17/93, 1995).
Этот способ реализуется устройством для предотвращения столкновений автомобилей, содержащим оптико-электронный преобразователь, включающий оптический фокусирующий элемент, оптический фильтр, n чувствительных элементов и бленду, теплоизоляцию, закрывающую оптико-электронный преобразователь со всех направлений, кроме направления приема, n добавочных сопротивлений, соединенных соответственно с n чувствительными элементами, коммутатор-определитель координат, соединенный последовательно через первый вход блока определения опасного расстояния с генератором сигнала тревоги, содержащим генератор звуковых сигналов, схему ИЛИ и динамик, второй вход микропроцессора связан с датчиком скорости, n добавочных сопротивлений, соединенных соответственно с n чувствительными элементами, параллельно подсоединенными своими свободными концами к одному выходу источника питания, к другому выходу которого параллельно подсоединены свободные концы добавочных сопротивлений, и (n-1) дифференциальных усилителей, первый вход 1-го и второй вход (n-1)-го из которых связаны соответственно с общими точками первых и n-х чувствительных элементов и добавочных сопротивлений, вторые входы нечетных дифференциальных усилителей, исключая (n-1)-й, и первые входы четных попарно подсоединены соответственно к общим точкам таких же четных чувствительных элементов и добавочных сопротивлений, вторые входы четных и первые входы нечетных усилителей, исключая 1-й, попарно подключены к общим точкам таких же нечетных чувствительных элементов и добавочных сопротивлений, а выходы дифференциальных усилителей связаны с соответствующими входами коммутатора-определителя координат, при этом один из чувствительных элементов расположен в фокусе оптического элемента, а остальные размещены один над другим выше фокуса.
Недостатками данного способа и устройства являются определение допустимой дистанции до впередиидущего транспортного средства без учета уклона дороги, влияющего на длину тормозного пути, а также отсутствие информации, предоставляемой водителю автомобиля, о возможности его обгона при наличии транспортного средства на полосе встречного движения.
Наиболее близким к предлагаемому является способ предотвращения столкновений автомобилей, заключающийся в том, что принимают оптическое излучение от автомобилей, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояния до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры впередиидущего транспортного средства и на основе данной информации обеспечивают выдачу рекомендаций водителю о соблюдении безопасной дистанции до впередиидущего автомобиля и о возможности выполнения маневра по его обгону в условиях встречного движения транспортного средства по встречной полосе (патент РФ №2310922, кл. G01S 17/93, 2007).
Способ реализуется в устройстве для предотвращения столкновений автомобилей, содержащем первый и второй оптико-электронный преобразователь, коммутатор-определитель координат, генератор сигнала тревоги, вычислитель, переключатель ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения, первый, второй, третий и четвертый световые сигнализаторы.
Каждый из оптико-электронных преобразователей состоит из оптического фокусирующего элемента, n чувствительных элементов, бленды, оптического фильтра, n добавочных сопротивлений, n-1 дифференциальных усилителей, коммутатора-определителя координат, при этом первый преобразователь содержит блок определения опасных расстояний и генератор сигнала тревоги, n добавочных сопротивлений соединены соответственно с n чувствительными элементами, одни выводы которых параллельно подсоединены к одному выходу источника питания, к другому выходу которого подсоединены выводы добавочных сопротивлений, первый вход первого и второй вход (n-1)-го дифференциальных усилителей соединены соответственно с большими точками первых и n-х чувствительных элементов и добавочных сопротивлений, вторые выходы нечетных дифференциальных усилителей, кроме (n-1)-го, и первые входы четных попарно соединены соответственно с общими точками одноименных четных чувствительных элементов и добавочных сопротивлений, вторые входы четных и первые входы нечетных дифференциальных усилителей, кроме первого, попарно подключены к общим точкам соединения одноименных чувствительных элементов и добавочных сопротивлений, выходы дифференциальных усилителей соединены с соответствующими входами коммутатора-определителя координат, выход которого соединен через первый вход блока определения опасных расстояний с входом генератора сигнала тревоги, а второй вход блока определения опасных расстояний соединен с выходом датчика скорости движения автомобиля, выходы первого и второго оптико-электронных преобразователей соединены соответственно с первым и вторым входами вычислителя, при этом один из чувствительных элементов расположен в фокусе оптического фокусирующего элемента, а остальные расположены один над другим выше фокуса.
Вычислитель состоит из блоков определения скорости сближения с транспортными средствами, движущимися по полосе попутного и встречного движения, и блока логики, причем выход первого оптико-электронного преобразователя соединен одновременно с первым входом блока определения скорости сближения с транспортным средством, движущимся по полосе попутного движения, и первым входом блока логики, выход второго оптико-электронного преобразователя соединен одновременно со вторым входом блока определения скорости сближения с транспортным средством, движущимся по полосе встречного движения, и четвертым входом блока логики, выходы блоков определения скорости сближения с транспортными средствами соединены со вторым и третьим входами блока логики, пятый вход которого соединен с выходом датчика скорости автомобиля, а шестая группа входов соединена с выходом переключателя ввода информации о геометрических размерах транспортного средства в направлении попутного движения, первый, второй, третий и четвертый выходы блока логики соединены соответственно с первым, вторым, третьим и четвертым световыми сигнализаторами.
Недостатками указанного выше способа и устройства являются:
отсутствие учета продольного наклона дороги при расчете тормозного пути автомобиля и определении безопасной дистанции до впередиидущего автомобиля;
отсутствие учета пути, пройденного обгоняемым автомобилем за время обгона;
отсутствие заблаговременной оценки безопасности обгона до его начала с использованием в расчетах реальных максимально достижимых значений ускорения обгоняющего автомобиля с учетом его технического состояния, загрузки и уклона дороги.
Эти обстоятельства определяют несоответствие принятой в данном способе модели обгона транспортного средства требованиям безопасности реального процесса. В прототипе решение на обгон принимается только с учетом текущей скорости равномерного движения обгоняющего автомобиля, без прогноза ее нарастания в ходе равноускоренного движения автомобиля при обгоне. Это делает невозможным принятие достоверного решения на обгон до его начала, без выхода на встречную полосу и набора скорости, что создает предпосылки к столкновению автомобилей. Решение на обгон должно приниматься при нахождении обгоняющего автомобиля на своей полосе или с небольшим выездом на полосу встречного движения для оценки обстановки и определения расстояния до встречного автомобиля, с учетом динамических характеристик обгоняющего автомобиля, его текущей загрузки, уклона дороги и определения времени, необходимого для обгона, с учетом прогноза возможного увеличения скорости. По результатам сравнения этого времени со временем столкновения со встречным автомобилем принимается решение на обгон.
Целью предлагаемого изобретения является увеличение достоверности выбора безопасной дистанции до впередиидущего автомобиля и оценки безопасности его обгона за счет дополнительного учета максимально возможного ускорения автомобиля при его данном техническом состоянии и загрузке, а также за счет учета влияния продольного уклона дорожного полотна на длину тормозного пути и текущее ускорение автомобиля.
Это достигается тем, что в способе предотвращения столкновений автомобиля заключающемся в том, что одновременно принимают оптическое излучение от автомобилей, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояния до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры транспортного средства в направлении движения, дополнительно используют датчик продольного уклона дороги и датчик ускорения автомобиля и в начале каждой поездки определяют максимальное достижимое ускорение используемого автомобиля, за счет выполнения определенной процедуры тестирования, с учетом его текущего технического состояния и загрузки и используют эту величину при расчетах безопасности проведения маневра обгона до его начала и, с учетом уклона дороги, осуществляют контроль совершения обгона по полосе встречного движения, обеспечивая выдачу светозвуковой сигнализации в случаях его запрета, а также в случаях, когда дистанция до впередиидущего автомобиля, движущегося в попутном направлении, становится меньше допустимой.
Тестирование текущих динамических характеристик автомобиля или оценка максимально достижимого им ускорения, с учетом его технического состояния и текущей загрузки, производится на начальном этапе движения автомобиля, например на третьей передаче, по ровному участку дороги на скорости 50 км/час, при нажатии педали акселератора до упора в течение трех секунд на основе показаний устанавливаемого в автомобиль датчика ускорения (акселерометра) либо путем расчета прироста скорости за заданное время.
Способ реализован в устройстве для предотвращения столкновений автомобиля, содержащем два оптико-электронных преобразователя, вычислитель, состоящий из блока определения скорости сближения с транспортными средствами и блока логики, переключатель ввода информации о геометрических размерах транспортного средства, движущегося в попутном направлении, световые сигнализаторы, в которое дополнительно включены блок оценки динамических характеристик автомобиля, датчик ускорения, датчик продольного уклона дороги и два звуковых сигнализатора, причем выходы датчиков ускорения, скорости и продольного уклона дороги соединены с входом блока логики и дополнительно с входом блока оценки динамических характеристик автомобиля, выход которого соединен с входом блока логики, а входы звуковых сигнализаторов соединены с выходом блока логики.
Каждый из оптико-электронных преобразователей состоит из оптического фокусирующего элемента, n чувствительных элементов, бленды, оптического фильтра, n усилителей и коммутатора-определителя координат. Причем выходы n чувствительных элементов через усилители сигнала соединены с входами коммутатора-определителя координат, выходы которых соединены с входами блока определения скорости сближения с транспортными средствами, при этом один из чувствительных элементов расположен в фокусе оптического фокусирующего элемента, а остальные расположены один над другим выше фокуса.
Вычислитель состоит из блока определения скорости сближения с транспортными средствами, движущимися по полосе попутного и встречного движения, и блока логики, в него дополнительно включен блок оценки динамических характеристик автомобиля, причем выход первого оптико-электронного преобразователя соединен одновременно с первым входом блока определения скорости сближения с транспортным средством, движущимся по полосе попутного движения, и первым входом блока логики, выход второго оптико-электронного преобразователя соединен одновременно со вторым входом блока определения скорости сближения с транспортным средством, движущимся по полосе встречного движения, и четвертым входом блока логики, выходы блока определения скорости сближения с транспортными средствами соединены со вторым и третьим входами блока логики, пятый вход которого соединен с выходом переключателя ввода информации о геометрических размерах транспортного средства в направлении попутного движения, выход датчика уклона дороги соединен с шестым входом блока логики, выход датчика скорости автомобиля соединен с седьмым, а выход датчика ускорения - с восьмым входом блока логики, первый, второй, третий и четвертый выходы блока логики соединены соответственно с первым и вторым световыми сигнализаторами и первым и вторым звуковыми сигнализаторами.
Блок логики представляет собой устройство, где, по определяемым параметрам движения автомобиля и дорожной обстановки, производятся расчет и оценка безопасной дистанции до впередиидущего автомобиля и безопасности его обгона в условиях интенсивного движения и наличия на полосе встречного движения встречного автомобиля в соответствии с заданным алгоритмом:
1. Определяется дистанция до впередиидущего автомобиля.
2. Определяется продольный уклон дороги.
3. Определяется длина тормозного пути с учетом текущей скорости и уклона дороги.
4. Проводится сравнение длины тормозного пути и текущей дистанции до впередиидущего автомобиля, и в случае, когда тормозной путь превышает дистанцию, выдается сигнал тревоги.
5. Определяется расстояние, которое необходимо пройти обгоняющему автомобилю при обгоне впередиидущего транспортного средства, как сумма длин двух интервалов безопасности, длины обгоняемого автомобиля и длины пройденного им за время обгона пути.
6. Определяется расстояние между обгоняющим и встречным автомобилями до начала обгона.
7. Определяется скорость сближения автомобилей с учетом равноускоренного движения обгоняющего и равномерного движения встречного автомобилей.
8. Определяется предполагаемое время столкновения автомобилей.
9. Определяется время, необходимое обгоняющему автомобилю для совершения обгона.
10. Сравнивается время столкновения со временем обгона.
11. В случае когда время обгона меньше времени столкновения на величину, необходимую для безопасного разъезда встречных автомобилей, обгон разрешается, в противном случае выдается сигнал запрета.
При отсутствии на полосе встречного движения встречного автомобиля оценка безопасности обгона не проводится.
Блок оценки динамических характеристик представляет собой устройство, позволяющее определять максимальное возможное ускорение автомобиля с учетом его технического состояния и загрузки и рассчитать максимально достижимые скорости движения за заданное время при использовании различных передаточных отношений коробки передач автомобиля, по результатам его измерения в моменты тестирования, а также преобразовать сигналы датчиков уклона дороги, ускорения и скорости автомобиля в цифровой вид для передачи в блок логики.
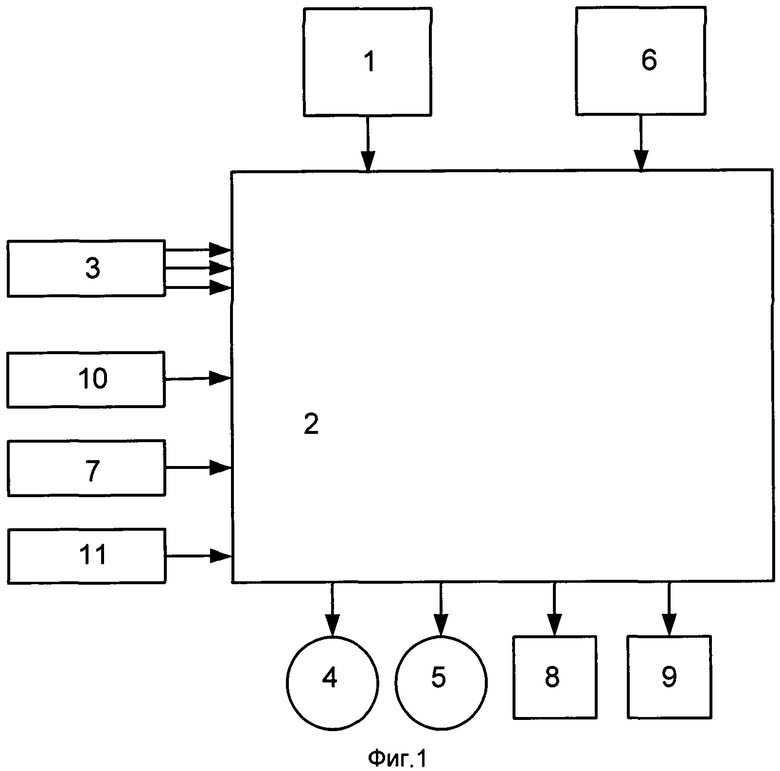
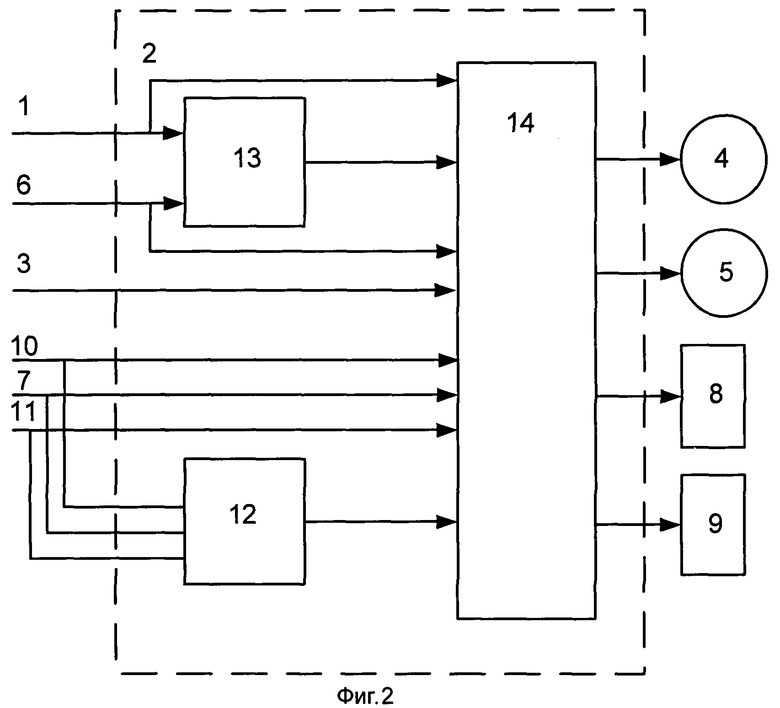
Устройство (фиг.1, 2) для предотвращения столкновения автомобиля содержит первый оптико-электронный преобразователь 1, вычислитель 2, переключатель 3 ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения, первый 4, второй 5 световые сигнализаторы, второй оптико-электронный преобразователь 6, датчик скорости автомобиля 7, в него дополнительно включены звуковые сигнализаторы 8 и 9, датчик продольного уклона дороги 10, датчик ускорения автомобиля 11, блок оценки динамических характеристик автомобиля 12. Вычислитель 2 (фиг.2) содержит блок определения скорости сближения с транспортными средствами 13, блок логики 14 и блок определения динамических характеристик автомобиля 12. Один из выходов оптико-электронных преобразователей 1 и 6 соединен с блоком определения скорости сближения с транспортными средствами 13, а их второй выход соединен с входом блока логики 14. Блок логики представляет собой вычислительное устройство, реализующее алгоритм решения задачи безопасного обгона автомобиля. Кроме того, вход блока логики 14 соединен с выходами датчика продольного уклона дороги 10, датчика скорости 7, датчика ускорения автомобиля 11 и переключателя 3 ввода информации о геометрических размерах транспортного средства, движущегося по полосе попутного движения. Выходы блока логики соединены со средствами световой 4, 5 и звуковой 8, 9 индикации. Вход блока оценки динамических характеристик автомобиля 12 соединен с выходами датчиков скорости 7, наклона автомобиля 10 и датчика ускорения автомобиля 11, а выход соединен с входом блока логики 14.
Устройство работает следующим образом.
При движении автомобиля определяются расстояния до транспортных средств, находящихся на полосах попутного и встречного движения. Определение расстояния осуществляется на основе приема и преобразования излучений первым 1 и вторым 6 оптико-электронными преобразователями.
Информация о расстоянии до транспортных средств, находящихся на попутных и встречных полосах движения, поступает из блока определения скорости сближения с транспортным средством 13 в блок логики 14, где с учетом данных из блока оценки динамических характеристик 12, таких как текущая скорость и максимально достижимое ускорение автомобиля, продольный наклон дороги, перед началом обгона по заданному алгоритму производится расчет задачи обгона и оценка его безопасности. При невозможности безопасного обгона, блок логики 14 выдает сигнал на средства световой 4 и звуковой 8 сигнализации. В ходе выполнения обгона производится сравнение текущих параметров движения (скорость и ускорение) с расчетными, и, при их несоответствии, также срабатывает световая 4 и звуковая 8 сигнализация. Оценка возможности обгона при наличии автомобиля, движущегося по полосе встречного движения, производится исходя из условия, что разность пройденных путей автомобиля, движущегося по встречной полосе, и обгоняющего автомобиля за один промежуток времени будет больше некоторого расстояния, определяемого требованиями безопасного маневрирования с учетом скорости сближения автомобилей.
Блок логики 14, на основе информации о текущем продольном уклоне дороги и скорости автомобиля, делает расчет его тормозного пути, выдает рекомендации о допустимой дистанции до впередиидущего автомобиля и проводит ее сравнение с текущей дистанцией, и, в случае невыполнения условия безопасности, с блока поступает сигнал тревоги на световой 5 и звуковой 9 сигнализаторы.
Новыми признаками, обладающими существенными отличиями по способу, являются следующие действия:
определение максимально-достижимого ускорения автомобиля с учетом его текущей загрузки и технического состояния;
определение текущего продольного наклона дороги;
оценка безопасности обгона впередиидущего транспортного средства до начала его проведения с учетом проходимого им за время обгона пути;
учет уклона дороги при оценке безопасности обгона впередиидущего транспортного средства;
учет уклона дороги при оценке безопасности дистанции до впередиидущего транспортного средства;
контроль безопасности выполняемого обгона с учетом уклона дороги.
Группа изобретений относится к технике предотвращения столкновений и наездов автомобилей и других транспортных средств (ТС). На автомобиле одновременно принимают оптическое излучение от ТС, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояния до ТС, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры ТС, движущегося в попутном направлении. На основе данной информации обеспечивают выдачу световой сигнализации о соблюдении безопасной дистанции до впередиидущего ТС и о возможности выполнения маневра обгона в условиях нахождения ТС на полосе встречного движения. Кроме того, определяют максимально достижимое при текущей загрузке и техническом состоянии ускорение автомобиля, определяют продольный уклон дороги, определяют возможность безопасного обгона впередиидущего ТС до начала его проведения, с учетом проходимого им за время обгона пути. В ходе обгона контролируют соответствие текущих значений ускорения, скорости обгоняющего автомобиля и расстояния до встречного ТС расчетным значениям и выдают световой и звуковой сигнал на запрет обгона по полосе встречного движения в случае угрозы их столкновения, а также об опасной дистанции, с учетом уклона дороги, до впередиидущего ТС. Группа изобретений позволяет увеличить достоверность оценки безопасности обгона и выбора безопасной дистанции до впередиидущего ТС путем учета таких дополнительных факторов, как уклон дорожного полотна, текущее и максимально возможное при данной загрузке ускорение автомобиля. 2 н.п. ф-лы, 2 ил.
1. Способ предотвращения столкновений автомобилей, заключающийся в том, что на автомобиле одновременно принимают оптическое излучение от транспортных средств, находящихся на попутной и встречной полосах движения, преобразовывают их в электрические сигналы, определяют расстояния до транспортных средств, находящихся на попутной и встречной полосах движения, определяют скорости сближения с ними, определяют геометрические размеры транспортного средства, движущегося в попутном направлении, и на основе данной информации обеспечивают выдачу световой сигнализации о соблюдении безопасной дистанции до впереди идущего транспортного средства и о возможности выполнения маневра обгона в условиях нахождения транспортного средства на полосе встречного движения, отличающийся тем, что определяют максимально достижимое при текущей загрузке и техническом состоянии ускорение автомобиля, определяют продольный уклон дороги, определяют возможность безопасного обгона впереди идущего транспортного средства до начала его проведения, с учетом проходимого им за время обгона пути, контролируют в ходе обгона соответствие текущих значений ускорения, скорости обгоняющего автомобиля и расстояния до встречного транспортного средства расчетным значениям и выдают световой и звуковой сигналы на запрет обгона по полосе встречного движения в случае угрозы их столкновения, а также об опасной дистанции, с учетом уклона дороги, до впереди идущего транспортного средства.
2. Устройство для реализации способа предотвращения столкновений автомобилей по п.1, содержащее два оптико-электронных преобразователя, вычислитель, состоящий из блока определения скорости сближения с транспортными средствами и блока логики, переключатель ввода информации о геометрических размерах транспортного средства, движущегося в попутном направлении, датчик скорости и два световых сигнализатора, при этом выходы оптико-электронных преобразователей подключены к соответствующим входам блока определения скорости сближения с транспортными средствами и блока логики, выход блока определения скорости сближения с транспортными средствами, а также выходы упомянутого переключателя ввода информации и датчика скорости соединены с соответствующими входами блока логики, соответствующие выходы которого подключены к световым сигнализаторам, отличающееся тем, что в него введены датчик ускорения, датчик продольного уклона дороги и два звуковых сигнализатора, а вычислитель снабжен блоком оценки динамических характеристик автомобиля, причем выходы датчиков ускорения, скорости и продольного уклона дороги подключены к соответствующим входам блока оценки динамических характеристик автомобиля, выход блока оценки динамических характеристик автомобиля, а также выходы датчиков ускорения и продольного уклона дороги соединены с соответствующими входами блока логики, соответствующие выходы которого подключены к звуковым сигнализаторам.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| DE 4200694 A1, 15.07.1993 | |||
| JP 2002137652 A, 14.05.2002 | |||
| CN 200997184 Y, 26.12.2007. | |||

