Изобретение относится к автоматическому управлению и может найти применение в системах управления электроприводами и регулируемыми источниками питания.
Известен способ автоматического управления, использующий скользящий процесс, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный сигнал, пропорциональный производной выходного сигнала системы, формируют управляющий сигнал, пропорциональный сумме сигнала ошибки и дифференцированного сигнала, определяют знак управляющего сигнала, управление осуществляют по знаку управляющего сигнала [1-3]
Основным недостатком этого способа управления является теоретически неограниченное повышение частоты переключения регулирующего элемента системы управления в установившихся режимах работы, что приводит к увеличению динамических потерь в регулирующем элементе.
Известен способ автоматического управления, использующий скользящий процесс только в переходных режимах работы, отличающийся от предыдущего тем, что отключают дифференцированный сигнал в режимах работы, близких к установившемуся [4]
Недостатком этого способа управления является необходимость настройки системы управления под два режима работы, что усложняет схему управления и понижает устойчивость системы управления.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ автоматического управления с широтно-импульсным регулированием (способ управления импульсным стабилизатором напряжения), заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный сигнал, пропорциональный производной выходного сигнала системы, формируют управляющий сигнал, пропорциональный сумме сигнала ошибки и дифференцированного сигнала, задают хронирующий периодический сигнал, формируют широтно-импульсный сигнал из управляющего сигнала и периодического хронирующего сигнала, автоматическое управление осуществляют широтно-импульсным сигналом [5]
Преимуществом этого способа является то, что автоматическое управление осуществляется на фиксированной частоте.
Известное устройство (импульсный стабилизатор напряжения), выбранное в качестве прототипа, содержит регулирующий элемент, фильтр, три узла сравнения, триггер, генератор пилообразного напряжения, датчик тока и шину опорного напряжения задания, управляющий вход регулирующего элемента соединен с выходом триггера, выход регулирующего элемента соединен с входом фильтра, выход фильтра является выходом устройства, генератор пилообразного напряжения имеет два выхода, один выход генератора пилообразного напряжения является шиной пилообразного напряжения, второй выход генератора пилообразного напряжения является шиной синхронизации, входы первого узла сравнения соединены с шиной пилообразного напряжения и с шиной управляющего напряжения, выход первого узла сравнения соединен с одним из входов триггера, второй вход триггера соединен с шиной синхронизации, входы второго узла сравнения соединены с шиной сигнала ошибки и с выходом датчика тока, выход второго узла сравнения является шиной управляющего напряжения, входы датчика включены в силовую цепь фильтра, входы третьего узла сравнения соединены с выходом устройства и с шиной опорного напряжения задания, выход третьего узла сравнения является шиной сигнала ошибки [5]
Управляющий сигнал, подаваемый на вход первого узла сравнения описывается выражением:
Y K2˙[K1˙(Uoп Uc) Uд] (1) где К1, К2 коэффициенты передачи соответствующих узлов сравнения;
Uоп опорное напряжение задания;
Uс выходное напряжение стабилизатора;
Uд напряжение на выходе датчика тока.
Датчик тока измеряет ток нагрузки и ток конденсаторов фильтра устройства
Uд=  c
c  +
+  , где С емкость конденсаторов фильтра устройства;
, где С емкость конденсаторов фильтра устройства;
Rн сопротивление нагрузки;
α коэффициент преобразования.
Подставляя выражение напряжения датчика тока в уравнение 1, получим
Y K K
K Uоп-U
Uоп-U -
- c
c  +
+  , (2) которое преобразуется к виду
, (2) которое преобразуется к виду
Y -(X+T ), (3) где X K1·K2·[(1+β)Uc-Uоп] β
), (3) где X K1·K2·[(1+β)Uc-Uоп] β 
 K1·K2·(1+β)
K1·K2·(1+β) ; Tд=
; Tд= 
При правильном выборе коэффициента Тд режим работы системы управления можно определить как квазискользящий [6] с алгоритмом работы первого узла сравнения"





 , (4) где АL(t) значение периодического хронирующего сигнала (например пилообразного) в момент времени t;
, (4) где АL(t) значение периодического хронирующего сигнала (например пилообразного) в момент времени t;
VT 1 регулирующий элемент замкнут;
VT 0 регулирующий элемент разомкнут.
Для устранения повторных срабатываний на периоде выход первого узла сравнения соединен с одним из входом триггера, второй вход триггера соединен с шиной синхронизации.
Уравнение линии квазискольжения системы имеет вид
X+T -AL(t) (5) Представим (5) в виде
-AL(t) (5) Представим (5) в виде

 1+
1+ 
 (6) где Tэкв=
(6) где Tэкв=  видно, что при X __→ 0
видно, что при X __→ 0
Tэкв __→ 0, что эквивалентно уменьшению наклона линии скольжения.
Известно, что при автоматическом управлении со скользящим режимом работы без синхронизации системы, уравнение линии скольжения имеет вид
X+T 0 или
0 или 
 , (7) где Тд соnst.
, (7) где Тд соnst.
Таким образом, недостаток известного способа и устройства заключается в том, что при X __→ 0 уменьшается наклон линии скольжения, а это приводит к замедлению переходного процесса при подходе к заданному режиму работы, большей динамической ошибке и меньшей устойчивости (особенно при малых нагрузках) вследствие появления так называемого предельного цикла.
Цель изобретения состоит в расширении области устойчивой работы, уменьшении динамической ошибки и повышении быстродействия.
Это достигается тем, что при способе автоматического управления с широтно-импульсным регулированием, заключающемся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный сигнал, пропорциональный производной выходного сигнала системы, задают периодический хронирующий сигнал, формируют широтно-импульсный сигнал из управляющего сигнала и периодического хронирующего сигнала, автоматическое управление осуществляют широтно-импульсным сигналом, управляющий сигнал формируют пропорционально частному от деления дифференцированного сигнала на сигнал ошибки.
Сущность изобретения заключается в том, что автоматическое управление осуществляется по следующему алгоритму:
Tд + AL(t) > 0 VT 0
+ AL(t) > 0 VT 0
Tд + AL(t) < 0 VT 1 (8) где VT 1 регулирующий элемент замкнут;
+ AL(t) < 0 VT 1 (8) где VT 1 регулирующий элемент замкнут;
VT 0 регулирующий элемент разомкнут.
Уравнение линии квазискользящего процесса имеет вид ·
·  +X 0, (9) которое можно представить в виде
+X 0, (9) которое можно представить в виде 
 , где
, где  не зависит от Х, что эквивалентно канонической форме уравнения с изменением коэффициента передачи Тд пропорционально значению периодического хронирующего сигнала AL(t) для синхронизации квазискользящего режима работы.
не зависит от Х, что эквивалентно канонической форме уравнения с изменением коэффициента передачи Тд пропорционально значению периодического хронирующего сигнала AL(t) для синхронизации квазискользящего режима работы.
Результирующее выражение соответствует уравнению квазискользящего режима работы [3] на всем протяжении переходного процесса с синхронизацией процесса на фиксированной частоте за счет модуляции периодическим хронирующим сигналом AL(t) сигнала  При этом Тдэквне зависит от Х, процесс не замедляется при подходе к заданному режиму, уменьшается динамическая ошибка и при X __→ 0 отсутствует характерный предельный цикл, приводящий к возникновению в системе автоколебаний.
При этом Тдэквне зависит от Х, процесс не замедляется при подходе к заданному режиму, уменьшается динамическая ошибка и при X __→ 0 отсутствует характерный предельный цикл, приводящий к возникновению в системе автоколебаний.
В устройство для автоматического управления, содержащее регулирующий элемент, фильтр, два узла сравнения, триггер, генератор пилообразного напряжения и шину опорного напряжения задания, управляющий вход регулирующего элемента соединен с выходом триггера, выход регулирующего элемента соединен с входом фильтра, выход фильтра является выходом устройства, генератор пилообразного напряжения имеет два выхода, один выход генератора пилообразного напряжения является шиной пилообразного напряжения, второй выход генератора пилообразного напряжения является шиной синхронизации, входы первого узла сравнения соединены с шиной пилообразного напряжения и с шиной управляющего напряжения, выход первого узла сравнения соединен с одним из входов триггера, второй вход триггера соединен с шиной синхронизации, выход устройства соединен с одним из входов второго узла сравнения, второй вход второго узла сравнения соединен с шиной опорного напряжения задания, выход второго угла сравнения является шиной сигнала ошибки, дополнительно введены логарифмический усилитель и дифференциатор, вход логарифмического усилителя соединен с шиной сигнала ошибки, выход логарифмического усилителя соединен с входом дифференциатора, а выход дифференциатора является шиной управляющего напряжения.
Дополнительно введенные в устройство управления логарифмический усилитель и дифференциатор позволяет получить требуемый согласно способу управляющий сигнал, так как
(lnX)′=  (10)
(10)
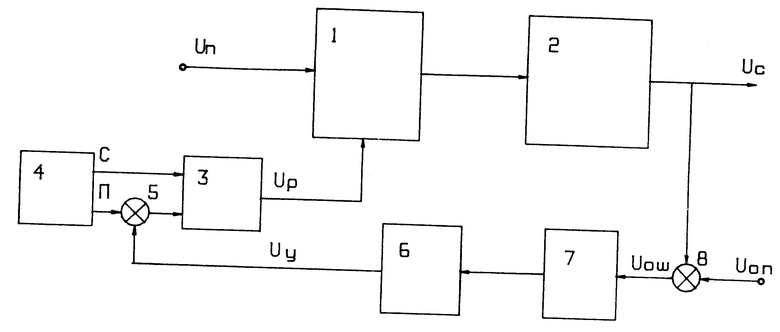
На чертеже приведена структурная схема импульсного источника стабилизированного напряжения.
Импульсный стабилизатор напряжения содержит входную шину Uписточника питания, выходную шину Uс устройства, регулирующий элемент 1, фильтр 2, триггер 3, генератор пилообразного напряжения 4, узел сравнения 5, дифференциатор 6, логарифмический усилитель 7, узел сравнения 8 и шину Uоп опорного напряжения задания. Управляющий вход регулирующего элемента 1 соединен с выходом триггера 3, выход регулирующего элемента 1 соединен с входом фильтра 2, выходная шина фильтра 2 является выходной шиной Uс устройства, генератор пилообразного напряжения 4 имеет две выходные шины: пилообразного напряжения шина П и синхронизации шина С. Входы узла сравнения 5 соединены с шиной П пилообразного напряжения и с шиной Uу управляющего напряжения, шина Uу управляющего напряжения является выходной шиной дифференциатора 6, выход узла сравнения 5 соединен с одним из входов триггера 3, второй вход триггера 3 соединен с шиной С синхронизации, выходная шина Uсустройства соединена с одним из входов узла сравнения 8, второй вход узла сравнения 8 соединен с шиной Uоп опорного напряжения задания, выход узла сравнения 8 является шиной Uош сигнала ошибки, вход логарифмического усилителя 7 соединен с шиной Uош сигнала ошибки, выход логарифмического усилителя 7 соединен с входом дифференциатора 6.
Импульсный стабилизатор напряжения работает следующим образом: на выходе узла сравнения 8 формируется сигнал ошибки. На выходе логарифмического усилителя 7 формируется сигнал, пропорциональный натуральному логарифму сигнала ошибки. На выходе дифференциатора 6 формируется сигнал производной от сигнала, пропорционального натуральному логарифму сигнала ошибки. В узле сравнения 5 из выходного сигнала дифференциатора 6 и сигнала пилообразного напряжения генератора пилообразного напряжения 4 формируется сигнал, который является включающим для триггера 3, а сигнал синхронизации генератора пилообразного напряжения 4 является выключающим для триггера 3. На выходе триггера 3 формируется широтно-импульсный сигнал, который является управляющим для регулирующего элемента 1.
Таким образом, предложенный способ управления позволяет получить квазискользящий режим работы при фиксированной частоте модуляции как при переходных процессах, так и в установившихся режимах работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| СЛЕДЯЩИЙ ИНВЕРТОР С ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2001 |
|
RU2202144C2 |
| СЛЕДЯЩИЙ ИНВЕРТОР С ОДНОСТОРОННЕЙ ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2264644C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2264689C2 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2197059C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМ МОМЕНТОМ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457610C2 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ СЛЕДЯЩЕГО ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ | 2003 |
|
RU2254663C2 |
| МОДУЛЯТОР ШИРИНЫ ИМПУЛЬСОВ МОСТОВОГО ИНВЕРТОРА | 1991 |
|
RU2026599C1 |
Изобретение относится к автоматическому управлению и предназначено для автоматизированного управления системами с линейной непрерывной частью первого и второго порядков, а также в системах управления электроприводами и регулируемыми источниками питания. Способ заключается в том, что выделяют сигнал ошибки как разность выходного сигнала системы и сигнала задания, формируют скоростной сигнал ошибки, а широтно-импульсный сигнал формируют из управляющего сигнала и периодического хронирующего, причем управляющий сигнал формируют прямо пропорциональным отношению скоростного сигнала и сигнала ошибки. 1 ил.
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ, заключающийся в том, что выделяют сигнал ошибки как разность выходного сигнала системы и сигнала задания, формируют скоростной сигнал ошибки, формируют широтно-импульсный сигнал из управляющего сигнала и периодического хронирующего сигнала, отличающийся тем, что управляющий сигнал формируют прямопропорциональным отношению скоростного сигнала и сигнала ошибки.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Шеваль В.В., Дорохов Е.И., Исаков С.А | |||
| и Земцов В.И | |||
| Двухзонные следящие системы | |||
| М.: Энергоатомиздат, 1984. | |||
