Предлагаемое изобретение относится к области автоматического управления и предназначено для следящих инверторов с двухполярной широтно-импульсной модуляцией (ШИМ) и с LC-фильтром в непрерывной части, и может найти широкое применение в управлении электроприводами, регулируемыми источниками питания и другими техническими устройствами.
Известен инвертор, в котором сигнал, переключающий импульсный элемент, формируют из суммы сигнала задания и сигнала временной развертки с пилообразным напряжением [1].
Недостаток использования сигнала временной развертки с пилообразным напряжением заключается в том, что ошибка на выходе инвертора зависит от напряжения питания и нагрузки. Кроме того, в следящих системах управления с известным инвертором для обеспечения устойчивой работы требуется введение сложных корректировок сигнала задания.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство управления с широтно-импульсным регулированием, содержащее: переключающий импульсный элемент, непрерывную часть (LC-фильтр), узел дифференцирования, узел выделения ошибки, блок формирования управляющего сигнала, RS-триггер и блок формирования сигнала развертки. Переключающий импульсный элемент соединяет вход непрерывной части с шинами напряжения питания, управляющий вход переключающего импульсного элемента соединен с выходом RS-триггера, выход непрерывной части соединен с выходом устройства, узел дифференцирования соединен с выходом непрерывной части, узел выделения ошибки соединен с выходом устройства и шиной опорного напряжения, блок формирования управляющего сигнала имеет три входа, первый вход блока формирования управляющего сигнала соединен с выходом узла дифференцирования, второй вход блока формирования управляющего сигнала соединен с выходом узла выделения ошибки, третий вход блока формирования управляющего сигнала соединен с выходом блока формирования сигнала развертки, выход блока формирования управляющего сигнала соединен с R-входом RS-тригтера, S-вход RS-триггера соединен с шиной синхронизации [2].
Известное устройство управления с широтно-импульсным регулированием реализует закон управления вида
где Х= Uc-Uоп - сигнал ошибки, формируется как разность между выходным сигналом устройства и опорным сигналом, UL1=Uп1-Uc и UL2=Uп2-Uc - напряжения между входом и выходом непрерывной части устройства на интервалах до и после коммутации переключающего импульсного элемента, Uп1, Uп2 - напряжения, приложенные к входу непрерывной части устройства на интервалах до и после коммутации переключающего импульсного элемента,  - сигнал производной от выходного сигнала непрерывной части устройства (выходной сигнал датчика тока), t - время от начала периода синхронизации, Td - коэффициент передачи,
- сигнал производной от выходного сигнала непрерывной части устройства (выходной сигнал датчика тока), t - время от начала периода синхронизации, Td - коэффициент передачи,  - постоянная времени непрерывной части устройства, Tп - длительность периода синхронизации, t=0 и t=Тп - начало и конец периода синхронизации (момент перехода от конца периода синхронизации к началу следующего периода синхронизации, возвращение переключающего импульсного элемента в исходное состояние), tк - моменты коммутации переключающего импульсного элемента, определяемые наименьшим корнем уравнения (1), VT(F, t) - состояние переключающего импульсного элемента (VT=1 подключено напряжение Uп1, VT=0 подключено напряжение Uп2).
- постоянная времени непрерывной части устройства, Tп - длительность периода синхронизации, t=0 и t=Тп - начало и конец периода синхронизации (момент перехода от конца периода синхронизации к началу следующего периода синхронизации, возвращение переключающего импульсного элемента в исходное состояние), tк - моменты коммутации переключающего импульсного элемента, определяемые наименьшим корнем уравнения (1), VT(F, t) - состояние переключающего импульсного элемента (VT=1 подключено напряжение Uп1, VT=0 подключено напряжение Uп2).
В известном устройстве управления с широтно-импульсным регулированием, сигнал временной развертки формируется как прогнозируемая на момент после коммутации ключевого элемента производная выходного сигнала, что позволяет управлять выходным напряжением практически без статической ошибки, так как изображающая точка устройства пульсирует относительно линии скольжения  во всем диапазоне регулирования, в установившихся режимах в момент коммутации импульсного элемента выполняется условие x(tк)=0.
во всем диапазоне регулирования, в установившихся режимах в момент коммутации импульсного элемента выполняется условие x(tк)=0.
Известное устройство управления с широтно-импульсным регулированием при двухполярной ШИМ может быть использовано в следящих инверторах.
Недостатком известного устройства при использовании его в следящих инверторах с двухполярной ШИМ является то, что не обеспечивается надлежащая последовательность коммутации переключающего импульсного элемента для сохранения типа модуляции при смене знака опорного сигнала, что приводит к снижению качества регулирования.
Цель изобретения состоит в повышении качества регулирования следящего инвертора.
Поставленная цель достигается тем, что из уравнения формирования управляющего сигнала для следящего инвертора по известному закону управления (1) для обеспечения сохранения типа модуляции и надлежащей последовательности коммутации переключающего импульсного элемента при смене знака опорного сигнала предлагается принять закон управления вида: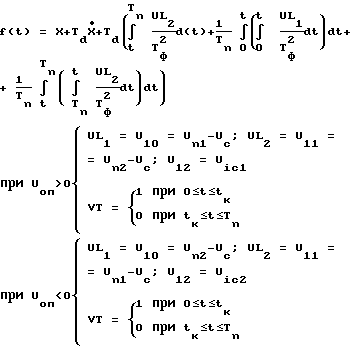
где Х= Uc-Uоп - сигнал ошибки, формируется как разность между выходным сигналом инвертора и опорным сигналом, UL1, UL2 - напряжения между входом и выходом непрерывной части на интервалах до и после коммутации переключающего импульсного элемента, Uп1, Uп2 - напряжения приложенные к входу непрерывной части устройства на интервалах до и после коммутации переключающего импульсного элемента, Uic1, Uic2 - напряжения синхронизации,  - сигнал производной от выходного сигнала непрерывной части (выходной сигнал датчика тока), t - время от начала периода синхронизации, Td - коэффициент передачи,
- сигнал производной от выходного сигнала непрерывной части (выходной сигнал датчика тока), t - время от начала периода синхронизации, Td - коэффициент передачи,  - постоянная времени непрерывной части устройства, Tп - длительность периода синхронизации, t=0 и t=Тп - начало и конец периода синхронизации (момент перехода от конца к началу следующего периода синхронизации, возвращение переключающего импульсного элемента в исходное состояние), tк - моменты коммутации переключающего импульсного элемента, определяемые наименьшим корнем уравнения f(t)=0, при Uоп>0 (в момент коммутации импульсного элемента отключается напряжение Uп1 и подключается напряжение Uп2) и при Uоп>0 (в момент коммутации импульсного элемента отключается напряжение Uп2 и подключается напряжение Uп1), VT(F, t) - состояние переключающего импульсного элемента (VT=1 подключено напряжение Uп1, VT=0 подключено напряжение Uп2).
- постоянная времени непрерывной части устройства, Tп - длительность периода синхронизации, t=0 и t=Тп - начало и конец периода синхронизации (момент перехода от конца к началу следующего периода синхронизации, возвращение переключающего импульсного элемента в исходное состояние), tк - моменты коммутации переключающего импульсного элемента, определяемые наименьшим корнем уравнения f(t)=0, при Uоп>0 (в момент коммутации импульсного элемента отключается напряжение Uп1 и подключается напряжение Uп2) и при Uоп>0 (в момент коммутации импульсного элемента отключается напряжение Uп2 и подключается напряжение Uп1), VT(F, t) - состояние переключающего импульсного элемента (VT=1 подключено напряжение Uп1, VT=0 подключено напряжение Uп2).
Для реализации закона управления (2) в известное устройство дополнительно введены пять двухканальных переключателей и вторая шина синхронизации, каждый двухканальный переключатель имеет управляющий вход, два сигнальных входа и один выход, управляющие входы двухканальных переключателей соединены с шиной опорного сигнала, первый сигнальный вход первого переключателя соединен с первой шиной синхронизации, второй сигнальный вход первого переключателя соединен с инверсным выходом блока формирования управляющего сигнала, выход первого переключателя соединен с S-входом RS-триггера, первый сигнальный вход второго переключателя соединен с прямым выходом блока формирования управляющего сигнала, второй сигнальный вход второго переключателя соединен с второй шиной синхронизации, выход второго переключателя соединен с R-входом RS-триггера, первый сигнальный вход третьего переключателя соединен с первой шиной питания, второй сигнальный вход третьего переключателя соединен с второй шиной питания, выход третьего переключателя соединен с первым входом блока формирования сигнала развертки, первый сигнальный вход четвертого переключателя соединен с второй шиной питания, второй сигнальный вход четвертого переключателя соединен с первой шиной питания, выход четвертого переключателя соединен с вторым входом блока формирования сигнала развертки, третий вход блока формирования сигнала развертки соединен с выходом непрерывной части, первый сигнальный вход пятого переключателя соединен с первой шиной синхронизации, второй сигнальный вход пятого переключателя соединен с второй шиной синхронизации, выход пятого переключателя соединен с четвертым входом блока формирования сигнала развертки.
На фиг.1 приведена структурная схема инвертора с двухполярной широтно-импульсной модуляцией, на фиг.2 приведены диаграммы работы основных узлов инвертора при смене знака опорного сигнала.
Инвертор с двухполярной широтно-импульсной модуляцией (фиг.1) содержит переключающий импульсный элемент 1, непрерывную часть 2, узел дифференцирования 3, узел выделения ошибки 4, блок формирования управляющего сигнала 5, RS-триггер 6 и блок формирования сигнала развертки 7, пять двухканальных переключателей 8÷12, переключающий импульсный элемент 1 соединяет вход непрерывной части 2 шинами напряжения питания Uп1, Uп2, управляющий вход переключающего импульсного элемента 1 соединен с выходом RS-триггера 6, выход непрерывной части 2 соединен с выходной шиной инвертора Uc, вход узла дифференцирования 3 соединен с выходом непрерывной части 2, входы узла выделения ошибки 4 соединены с выходной шиной инвертора Uc и с шиной опорного напряжения Uоп, блок формирования управляющего сигнала 5 имеет три входа, первый вход блока формирования управляющего сигнала 5 соединен с выходом узла дифференцирования 3, второй вход блока формирования управляющего сигнала 5 соединен с выходом узла выделения ошибки 4, третий вход блока формирования управляющего сигнала 5 соединен с выходом блока формирования сигнала развертки 7, каждый двухканальный переключатель 8÷12 имеет управляющий вход, два сигнальных входа и один выход, управляющие входы двухканальных переключателей 8÷12 соединены с шиной опорного сигнала Uоп, первый сигнальный вход переключателя 8 соединен с шиной синхронизации Uic1, второй сигнальный вход переключателя 8 соединен с инверсным выходом блока формирования управляющего сигнала 5, выход переключателя 8 соединен с S-входом RS-триггера 6, первый сигнальный вход переключателя 9 соединен с прямым выходом блока формирования управляющего сигнала 5, второй сигнальный вход переключателя 9 соединен с шиной синхронизации Uic2, выход переключателя 9 соединен с R-входом RS-триггера 6, первый сигнальный вход переключателя 10 соединен с шиной питания Uп1, второй сигнальный вход переключателя 10 соединен с шиной питания Uп2, выход переключателя 10 соединен с первым входом блока формирования сигнала развертки 7, первый сигнальный вход переключателя 11 соединен с шиной питания Uп2, второй сигнальный вход переключателя 11 соединен с шиной питания Uп1, выход переключателя 11 соединен с вторым входом блока формирования сигнала развертки 7, третий вход блока формирования сигнала развертки 7 соединен с выходом непрерывной части 2, первый сигнальный вход переключателя 12 соединен с шиной синхронизации Uic1, второй сигнальный вход переключателя 12 соединен с шиной синхронизации Uic2, выход переключателя 12 соединен с четвертым входом блока формирования сигнала развертки 7.
Следящий инвертор с двухполярной широтно-импульсной модуляцией работает следующим образом (фиг.1, 2).
Синхроимпульсы на шинах синхронизации Uic1, Uic2 задают начало и длительность периода синхронизации Tп, синхроимпульсы Uic1, Uic2 сдвинуты между собой на половину периода синхронизации.
При положительной полярности опорного сигнала Uоп в переключателях 8÷12 первый сигнальный вход соединен с выходом, при этом на S-вход RS-триггера 6 (вход установки единицы) поступает напряжение с шины синхронизации U8=Uic1, которое устанавливает RS-триггер 6 в состояние логической единицы в начале каждого периода синхронизации, на R-вход RS-триггера 6 (вход установки нуля) поступает напряжение с прямого выхода блока формирования управляющего сигнала 5 U9=U5, на первый вход блока формирования сигнала развертки 7 поступает напряжение с шины питания U10=Uп1, на второй вход блока формирования сигнала развертки 7 поступает напряжение с шины питания U11=Uп2, на четвертый вход блока формирования сигнала развертки 7 поступает напряжение с шины синхронизации U12=Uic1.
При отрицательной полярности опорного сигнала Uоп в переключателях 8÷12 второй сигнальный вход соединен с выходом, при этом на R-вход RS-триггера 6 (вход установки нуля) поступает напряжение с шины синхронизации U8=Uic2, которое устанавливает RS-триггер 6 в состояние логического нуля в начале каждого периода синхронизации, на S-вход RS-триггера 6 (вход установки единицы) поступает напряжение с инверсного выхода блока формирования управляющего сигнала 5 U9=U5, на первый вход блока формирования сигнала развертки 7 поступает напряжение с шины питания U10=Uп2, на второй вход блока формирования сигнала развертки 7 поступает напряжение с шины питания U11=Uп1, на четвертый вход блока формирования сигнала развертки 7 поступает напряжение с шины синхронизации U12=Uic2.
Дополнительно введенные пять двухканальных переключателей и вторая шина синхронизации обеспечивают в предлагаемом следящем инверторе с двухполярной широтно-импульсной модуляцией реализацию закона управления (2), с сохранением типа модуляции и надлежащей последовательностью коммутации переключающего импульсного элемента при смене знака опорного сигнала.
Источники информации
1. Патент РФ на изобретение 2026599, МПК6 Н 02 М 1/08, 10.01.1995.
2. Патент РФ на изобретение 2156996, МПК7 G 05 F 1/56, 27.09.2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ИНВЕРТОР С ОДНОСТОРОННЕЙ ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2264644C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2197059C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| Устройство контроля уровня переменного напряжения | 2017 |
|
RU2658564C1 |
| МНОГОКАНАЛЬНЫЙ БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ УПРАВЛЯЕМОГО МНОГОФАЗНОГО ВЫПРЯМИТЕЛЯ | 2000 |
|
RU2185703C1 |
| Устройство контроля уровня сигнала фазочувствительного датчика | 2017 |
|
RU2658562C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИМПУЛЬСОВ | 2004 |
|
RU2256288C1 |
| УПРАВЛЯЕМЫЙ ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2004 |
|
RU2257003C1 |

Изобретение относится к автоматическому управлению и предназначено для следящих инверторов с двухполярной широтно-импульсной модуляцией (ШИМ) и с LC-фильтром в непрерывной части и может найти широкое применение в управлении электроприводами, регулируемыми источниками питания. Техническим результатом является повышение качества регулирования следящего инвертора. Устройство содержит переключающий импульсный элемент, непрерывную часть, узел дифференцирования, узел выделения ошибки, блок формирования управляющего сигнала, RS-триггер, блок формирования сигнала развертки, пять переключателей, две шины питания, две шины синхронизации, шину опорного напряжения. 2 ил.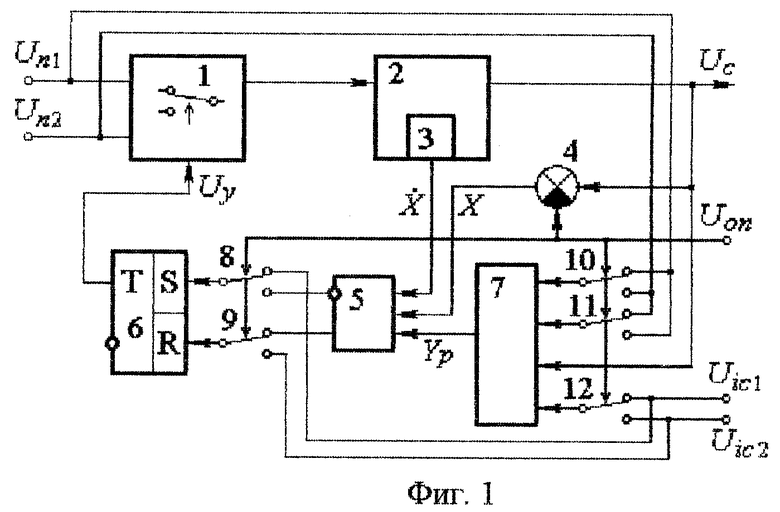
Следящий инвертор с двухполярной широтно-импульсной модуляцией, содержащий переключающий импульсный элемент, непрерывную часть, узел дифференцирования, узел выделения ошибки, блок формирования управляющего сигнала, RS-триггер и блок формирования сигнала развертки, переключающий импульсный элемент соединяет вход непрерывной части с шинами напряжений питания, управляющий вход переключающего импульсного элемента соединен с выходом RS-триггера, выход непрерывной части соединен с выходом инвертора, узел дифференцирования соединен с выходом непрерывной части, узел выделения ошибки соединен с выходом инвертора и с шиной опорного напряжения, блок формирования управляющего сигнала имеет три входа, первый вход блока формирования управляющего сигнала соединен с выходом узла дифференцирования, второй вход блока формирования управляющего сигнала соединен с выходом узла выделения ошибки, третий вход блока формирования управляющего сигнала соединен с выходом блока формирования сигнала развертки, отличающийся тем, что дополнительно введены пять двухканальных переключателей и вторая шина синхронизации, каждый двухканальный переключатель имеет управляющий вход, два сигнальных входа и один выход, управляющие входы двухканальных переключателей соединены с шиной опорного сигнала, первый сигнальный вход первого переключателя соединен с первой шиной синхронизации, второй сигнальный вход первого переключателя соединен с инверсным выходом блока формирования управляющего сигнала, выход первого переключателя соединен с S-входом RS-триггера, первый сигнальный вход второго переключателя соединен с прямым выходом блока формирования управляющего сигнала, второй сигнальный вход второго переключателя соединен со второй шиной синхронизации, выход второго переключателя соединен с R-входом RS-триггера, первый сигнальный вход третьего переключателя соединен с первой шиной питания, второй сигнальный вход третьего переключателя соединен со второй шиной питания, выход третьего переключателя соединен с первым входом блока формирования сигнала развертки, первый сигнальный вход четвертого переключателя соединен со второй шиной питания, второй сигнальный вход четвертого переключателя соединен с первой шиной питания, выход четвертого переключателя соединен со вторым входом блока формирования сигнала развертки, третий вход блока формирования сигнала развертки соединен с выходом непрерывной части, первый сигнальный вход пятого переключателя соединен с первой шиной синхронизации, второй сигнальный вход пятого переключателя соединен со второй шиной синхронизации, выход пятого переключателя соединен с четвертым входом блока формирования сигнала развертки.
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| МОДУЛЯТОР ШИРИНЫ ИМПУЛЬСОВ МОСТОВОГО ИНВЕРТОРА | 1991 |
|
RU2026599C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ АВТОНОМНЫМ ИНВЕРТОРОМ | 1991 |
|
RU2024175C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2025879C1 |
| Способ управления автономным инвертором | 1978 |
|
SU892651A1 |
| SU 1198707 A, 15.12.1985 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| DE 3901034 C1, 19.07.1990. | |||

