Заявляемое техническое решение относится к области электротехники и предназначено для управления вентильными двигателями с широким диапазоном регулирования частоты вращения.
Известен способ управления бесконтактным электродвигателем постоянного тока, заключающийся в том, что выбор рабочих ключевых элементов мостового инвертора, управляющего подачей напряжения на фазные обмотки электродвигателя, осуществляют по кодовым сигналам положения ротора, широтно-импульсную модуляцию напряжения питания осуществляют коммутацией рабочих ключевых элементов, управляющий сигнал для осуществления широтно-импульсной модуляции формируют из суммы сигнала ошибки, сигнала, пропорционального пульсирующей составляющей тока силовой цепи электродвигателя, и сигнала развертки, сигнал ошибки определяют пропорциональным разности выходного сигнала и сигнала задания, сигнал развертки формируют пилообразным спадающим до нуля с крутизной, пропорциональной прогнозируемой крутизне пульсирующей составляющей тока силовой цепи электродвигателя после коммутации ключевых элементов [2].
Известный способ управления может использоваться для управления вращающим моментом вентильного электродвигателя.
Недостатком известного способа управления является то, что вектор электромагнитного поля создаваемый фазными обмотками электродвигателя вращается дискретно с углом поворота, равным  эл.град, где m - число фазных обмоток электродвигателя, что создает пульсации вращающему моменту.
эл.град, где m - число фазных обмоток электродвигателя, что создает пульсации вращающему моменту.
Наиболее близким техническим решением, выбранным в качестве прототипа, является частотно-токовый способ управления, заключающийся в том, что в обмотки вентильного электродвигателя задаются токи, мгновенные значения которых определяются сигналом задания и угловым положением ротора двигателя и при этом они отвечают требованиям, предъявляемым к мгновенным значениям токов симметричной многофазной системы [1].
Недостатком известного способа является то, что удовлетворить требование симметрии мгновенных значений токов в многофазной системе регуляторов с широтно-импульсной модуляцией, охваченных жесткой обратной связью по току при независимом регулировании и широком диапазоне, практически невозможно.
Цель технического решения - уменьшение зоны нечувствительности и увеличение точности регулирования вращающего момента вентильного электродвигателя в широком диапазоне частот вращения.
Это достигается тем, что в способе управления вращающим моментом вентильного двигателя, заключающемся в том, что для каждой его фазной обмотки определяют сигнал требуемого тока как произведение сигнала задания, соответствующего синусоидального кодового сигнала положения ротора и коэффициента пропорциональности, измеряют ток в фазной обмотке, вычисляют сигнал ошибки как разность измеренного и требуемого тока, при этом дополнительно определяют расчетное значение ЭДС вращения фазной обмотки как произведение сигнала тахогенератора, соответствующего синусоидального кодового сигнала положения ротора и коэффициента пропорциональности, управляющий сигнал для переключения ключевых элементов мостового инвертора формируют из суммы сигнала ошибки и сигнала развертки, сигнал развертки формируют пилообразным, спадающим до нуля и равным к моменту коммутации ключевых элементов расчетному отрицательному значению сигнала ошибки, формируют синхронизующий сигнал равным дробной части от деления текущего значения времени на длительность периода модуляции, при этом для осуществления широтно-импульсной модуляции переднего фронта напряжения питания формируют два управляющих сигнала, первый для управления подключением к фазной обмотке напряжения питания положительной полярности, второй для - отрицательной полярности, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют отрицательным значением первого управляющего сигнала при условии отсутствия широтно-модулированного сигнала для отрицательной полярности, подключение к фазной обмотке напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют положительным значением второго управляющего сигнала при условии отсутствия широтно-модулированного сигнала для положительной полярности, отключение обоих широтно-модулированных сигналов производят при нулевом значении сигнала синхронизации, сигнал развертки для первого управляющего сигнала формируют равным произведению значений разности между напряжением питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на удвоенное значение индуктивности фазной обмотки, сигнал развертки для второго управляющего сигнала формируют равным произведению значений разности между отрицательным значением напряжения питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленной на удвоенное значение индуктивности фазной обмотки, при этом для осуществления широтно-импульсной модуляции заднего фронта напряжения питания формируют один управляющий сигнал, сигнал развертки которого формируют равным произведению значений отрицательной полярности ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на удвоенное значение индуктивности фазной обмотки, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют при нулевом значении сигнала синхронизации и при условии отрицательного значения управляющего сигнала, подключения к обмотке электродвигателя напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют при нулевом значении сигнала синхронизации и при условии положительного значения управляющего сигнала, отключение широтно-модулированного сигнала для положительной полярности производят положительным значением управляющего сигнала, отключение широтно-модулированного сигнала для отрицательной полярности производят отрицательным значением управляющего сигнала, при этом для осуществления двухсторонней широтно-импульсной модуляции напряжения питания формируют три управляющих сигнала, первый для управления подключением к фазной обмотке напряжения питания положительной полярности, второй для подключения к фазной обмотке напряжения питания отрицательной полярности, третий для управления отключением напряжения питания от фазной обмотки, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют при отрицательном значении первого управляющего сигнала, отключение широтно-модулированного сигнала для положительной полярности производят положительным значением третьего управляющего сигнала, подключения к обмотке электродвигателя напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют при положительном значении второго управляющего сигнала, отключение широтно-модулированного сигнала для отрицательной полярности производят отрицательным значением третьего управляющего сигнала, сигнал развертки для первого управляющего сигнала формируют равным произведению значений разности между напряжением питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на значение индуктивности фазной обмотки, сигнал развертки для второго управляющего сигнала формируют равным произведению значений разности между отрицательным значением напряжения питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на значение индуктивности фазной обмотки, сигнал развертки для третьго управляющего сигнала формируют равным произведению значений отрицательной полярности ЭДС вращения, длительности периода модуляции и разности между единицей и вторым сигналом синхронизации, деленных на значение индуктивности фазной обмотки, второй сигнал синхронизации формируют сдвинутым на полпериода модуляции относительно сигнала синхранизации, при этом для управления вращающим моментом вентильного электродвигателя мостовым инвертором с четырьмя ключевыми элементами, шунтированными обратными диодами, в режимах потребления и рекуперации энергии формируют сигнал полярности требуемого тока фазной обмотки, при положительной полярности требуемого тока фазной обмотки подключение к ней напряжения питания положительной полярности производят включением ключевых элементов положительной диагонали, отключение напряжения питания положительной полярности производят выключением одного из ключевых элементов положительной диагонали, подключение к фазной обмотке напряжения питания отрицательной полярности производят выключением обоих ключевых элементов положительной диагонали, отключение напряжения питания отрицательной полярности производят включением одного из ключевых элементов положительной диагонали, при отрицательной полярности требуемого тока фазной обмотки, подключение к ней напряжения питания отрицательной полярности производят включением ключевых элементов отрицательной диагонали, отключение напряжения питания отрицательной полярности производят выключением одного из ключевых элементов отрицательной диагонали, подключение к фазной обмотке напряжения питания положительной полярности производят выключением обоих ключевых элементов отрицательной диагонали, отключение напряжения питания положительной полярности производят включением одного из ключевых элементов отрицательной диагонали.
Сущность технического решения заключается в том, что при управлении вращающим моментом вентильного электродвигателя методами широтно-импульсной модуляции с формированием управляющего сигнала из суммы сигнала ошибки, вычисляемой как разность измеренного и требуемого тока фазной обмотки и спадающего до нуля пилообразного сигнала развертки, равного к моменту коммутации ключевых элементов расчетному значению сигнала ошибки, значение сигнала ошибки не превышает пульсирующей составляющей тока фазной обмотки от широтно-импульсной модуляции.
Предлагаемый способ управления реализует закон управления вида

где F - управляющий сигнал для коммутации напряжения питания;  сигнал ошибки по току фазной обмотки; Iф - ток фазной обмотки; Iоп=κфIз - требуемый ток фазной обмотки; Iз - сигнал задания; κф - кодовый синусоидальный сигнал положения ротора относительно фазной обмотки; Y - сигнал развертки,
сигнал ошибки по току фазной обмотки; Iф - ток фазной обмотки; Iоп=κфIз - требуемый ток фазной обмотки; Iз - сигнал задания; κф - кодовый синусоидальный сигнал положения ротора относительно фазной обмотки; Y - сигнал развертки,  значение сигнала развертки и пульсирующей составляющей тока дросселя в момент коммутации t=tк; V - широтно-модулированный управляющий сигнал выходного напряжения.
значение сигнала развертки и пульсирующей составляющей тока дросселя в момент коммутации t=tк; V - широтно-модулированный управляющий сигнал выходного напряжения.
Изменение тока фазной обмотки вентильного электродвигателя на участке после коммутации ключевых элементов зависит от напряжения  , приложенного к индуктивности обмотки после коммутации и происходит в соответствии с выражением
, приложенного к индуктивности обмотки после коммутации и происходит в соответствии с выражением

При этом напряжение равно
где  - напряжение, приложенное к фазной обмотке после коммутации ключевых элементов; UЭДС=κфκдω - ЭДС, наводимая в фазной обмотке; кд - конструктивный коэффициент электродвигателя; ω - скорость вращения ротора электродвигателя.
- напряжение, приложенное к фазной обмотке после коммутации ключевых элементов; UЭДС=κфκдω - ЭДС, наводимая в фазной обмотке; кд - конструктивный коэффициент электродвигателя; ω - скорость вращения ротора электродвигателя.
Выражение для формирования сигнала развертки, прогнозирующей значение сигнала ошибки по току на момент коммутации ключевых элементов, зависит от типа используемой широтно-импульсной модуляции.
При односторонней широтно-импульсной модуляции напряжения питания прогноз значения сигнала ошибки по току основан на том, что в установившемся режиме работы ее значение в момент коммутации равно половине приращения тока фазной обмотки по (2), так как среднее за период модуляции значение сигнала ошибки по току равно нулю, или сигнал развертки формируют выражением

где  - сигнал синхронизации;
- сигнал синхронизации;  - дробная часть выражения
- дробная часть выражения  T - длительность периода модуляции.
T - длительность периода модуляции.
При широтно-импульсной модуляции переднего фронта напряжения питания закон управления (1) с учетом (3) принимает вид

где F1, F2 - управляющие сигналы для включения напряжения питания положительной и отрицательной полярности; Y1, Y2 - сигналы развертки для F1 и F2; V1, V2 - широтно-модулированные управляющие сигналы положительной и отрицательной полярности выходного напряжения.
При широтно-импульсной модуляции заднего фронта напряжения питания закон управления (1) с учетом (3) принимает вид

где F3 - управляющий сигнал для отключения напряжения питания положительной и отрицательной полярности; Y3 - сигналы развертки для F3.
При двухсторонней широтно-импульсной модуляции напряжения питания прогноз значения сигнала ошибки по току основан на том, что в установившемся режиме работы ее значения дважды за период модуляции меняют полярность. Смена полярности происходит через равные промежутки времени, так как среднее значение этой составляющей за период модуляции равно нулю. Если моменты синхронизации совместить с моментами смены полярности сигнала ошибки от включения напряжения питания, то его прогнозирование осуществляют с учетом (2) выражениями
где  - второй сигнал синхронизации, сдвинутый на полпериода модуляции относительно сигнала tc.
- второй сигнал синхронизации, сдвинутый на полпериода модуляции относительно сигнала tc.
Для двухсторонней широтно-импульсной модуляции напряжения питания закон управления (1) с учетом (6) принимает вид

Управление вращающим моментом вентильного электродвигателя мостовым инвертором с четырьмя ключевыми элементами, шунтированными обратными диодами, в режимах потребления и рекуперации энергии осуществляют переключением ключевых элементов в соответствии с выражениями
VT1-V1Iоп(лог);

где VT1, VT2, VT3 и VT4 - сигналы переключающие соответствующие ключевые элементы мостового инвертора; Iоп(лог) - логический сигнал полярности требуемого тока фазной обмотки.
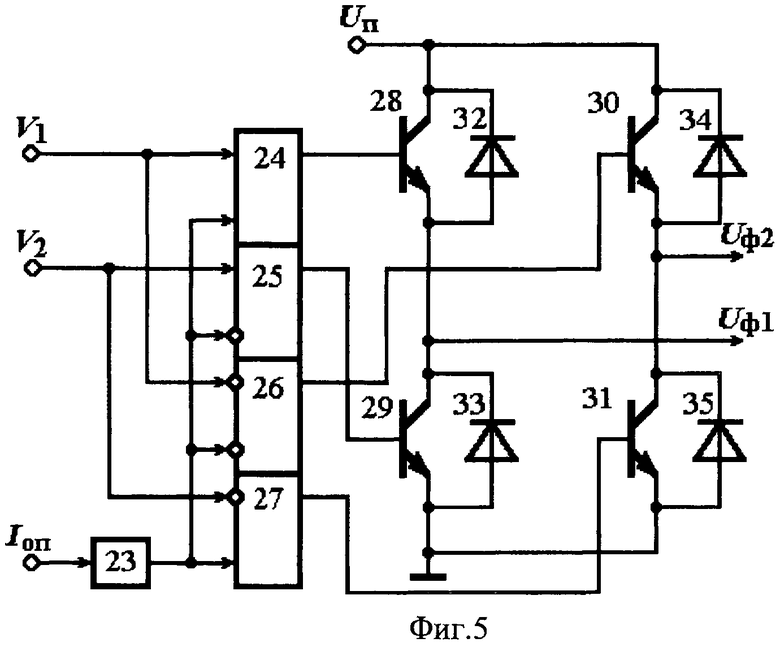
На фиг.1 приведена схема устройства реализующего предложенный способ управления вращающим моментом двухфазного вентильного двигателя, на фиг.2 приведена схема блока формирования широтно-модулированных сигналов управления регулятора, осуществляющего модуляцию переднего фронта напряжения питания, на фиг.3. приведена схема блока формирования широтно-модулированных сигналов управления регулятора, осуществляющего модуляцию заднего фронта напряжения питания, на фиг.4 приведена схема блока формирования широтно-модулированных сигналов управления регулятора, осуществляющего двухстороннюю модуляцию напряжения питания, на фиг.5 приведена схема мостового инвертора, реализующего управление током фазной обмотки вентильного электродвигателя в режимах потребления и рекуперации энергии.
Устройство, реализующее предложенный способ управления (фиг.1), содержит: двухфазный вентильный двигатель 1, на валу которого установлены датчик частоты вращения 2 и датчик положения ротора 3, входы первой обмотки вентильного двигателя 1 соединены с силовыми выходами регулятора 4, входы второй обмотки вентильного двигателя 1 соединены с силовыми выходами регулятора, силовой вход регуляторов 4 и 5 соединен с шиной питания Uп, первый управляющий вход регуляторов 4, 5 соединен с шиной сигнала тока задания Iз, второй управляющий вход регулятора 4 соединен с первой выходной шиной датчика 3, второй управляющий вход регулятора 5 соединен со второй выходной шиной датчика 3, третий управляющий вход регуляторов 4, 5 соединен с выходной шиной датчика 2, четвертый управляющий вход регуляторов 4, 5 соединен с шиной синхронизации tc.
Регулятор 4 (5) (фиг.1) состоит из: датчика тока 6, узла сравнения 7, двух узлов умножения 8 и 9, узла формирования сигналов разверток 10, узла формирования управляющих сигналов 11, узла формирования широтно-модулированных сигналов 12 и мостового инвертора 13. Силовые выходы мостового инвертора 13 соединены с силовыми выходами регулятора 4 (5), измерительные выводы датчика 6 включены в силовую выходную цепь мостового инвертора 13, выход датчика 6 соединен с отрицательным входом узла 7, первый вход узла 8 соединен с первым управляющим входом регулятора 4 (5), первый вход узла умножения 9 соединен с третьим управляющим входом регулятора 4 (5), второй вход узлов 8, 9 соединен со вторым управляющим входом регулятора 4 (5), четвертый управляющий вход регулятора 4 (5) соединен с синхронизующим входом узлов 10 и 12, выход узла 8 соединен с положительным входом узла 7 и с первым управляющим входом мостового инвертора 13, выход узла 9 соединен с первым входом узла 10, силовой вход регулятора 4 (5) соединен со вторым входом узла 10 и с силовым входом мостового инвертора 13, три выхода узла 10 соединены с соответствующими входами узла 11, выход узла 7 соединен с четвертым входом узла 11, три выхода узла 11 соединены с соответствующими входами узла 12, первый и второй выход узла 12 соединены соответственно со вторым и с третьим управляющими входами мостового инвертора 13.
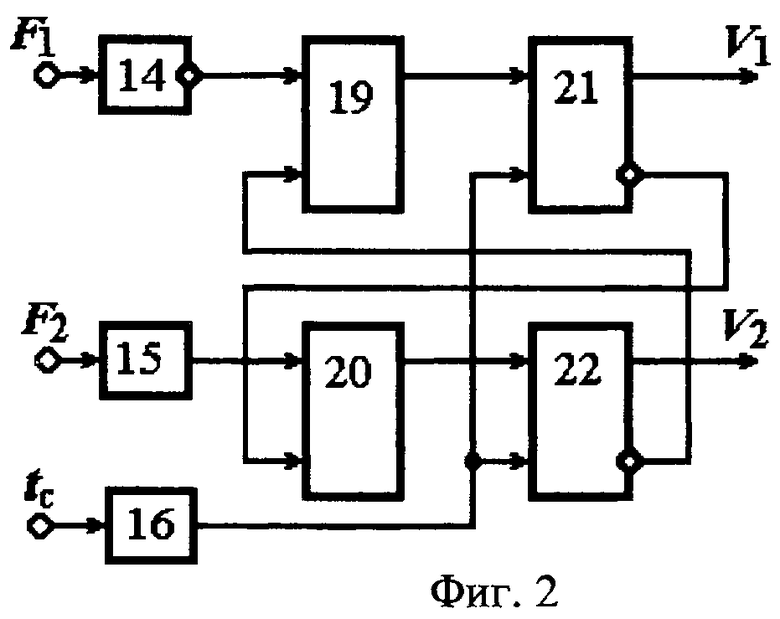
Узел формирования широтно-модулированных сигналов 12 регулятора 4 (5), осуществляющего модуляцию переднего фронта напряжения питания (фиг.2), состоит из: трех формирователей логического сигнала 14-16, двух логических элементов 2И 19, 20 и двух триггеров 21, 22. Первый вход узла 12 соединен с входом формирователя 14, второй вход узла 12 соединен с формирователем 15, синхронизующий вход узла 12 соединен с входом формирователя 16, первый вход логического элемента 19 соединен с выходом формирователя 14, второй вход логического элемента 19 соединен с инверсным выходом триггера 22, первый вход логического элемента 20 соединен с выходом формирователя 15, второй вход логического элемента 20 соединен с инверсным выходом триггера 21, выход логического элемента 19 соединен с первым входом триггера 21, выход логического элемента 20 соединен с первым входом триггера 22, вторые входы триггеров 21, 22 соединены, с выходом формирователя 16, прямой выход триггера 21 соединен с первым выходом узла 12, прямой выход триггера 22 соединен со вторым выходом узла 12.
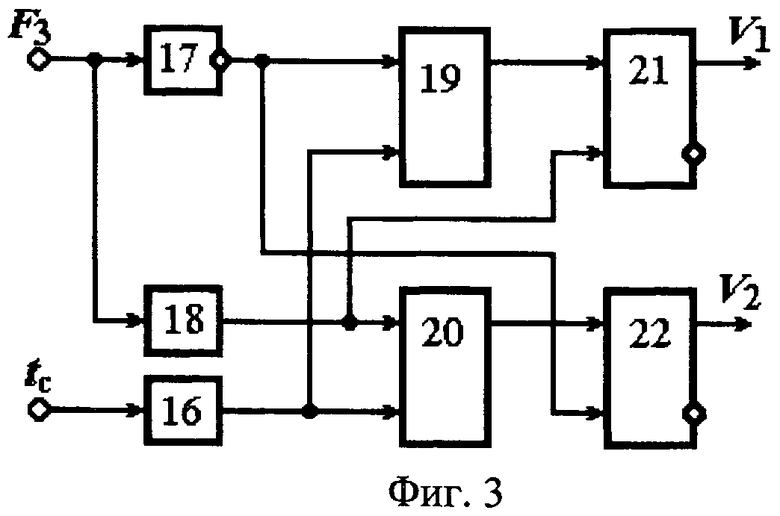
Узел формирования широтно-модулированных сигналов 12 регулятора 4 (5), осуществляющего модуляцию заднего фронта напряжения питания (фиг.3), состоит из: трех формирователей логического сигнала 16 -17, двух логических элементов 2И 19, 20 и двух триггеров 21, 22. Третий вход узла 12 соединен с входом формирователей 17, 18, синхронизующий вход узла 12 соединен с входом формирователя 16, выход формирователя 17 соединен с первым входом логического элемента 19 и со вторым входом триггера 22, выход формирователя 18 соединен с первым входом логического элемента 20 и со вторым входом триггера 21, выход формирователя 16 соединен со вторыми входами логических элементов 19, 20, выход логического элемента 19 соединен с первым входом триггера 21, выход логического элемента 20 соединен с первым входом триггера 22, прямой выход триггера 21 соединен с первым выходом узла 12, прямой выход триггера 22 соединен со вторым выходом узла 12.
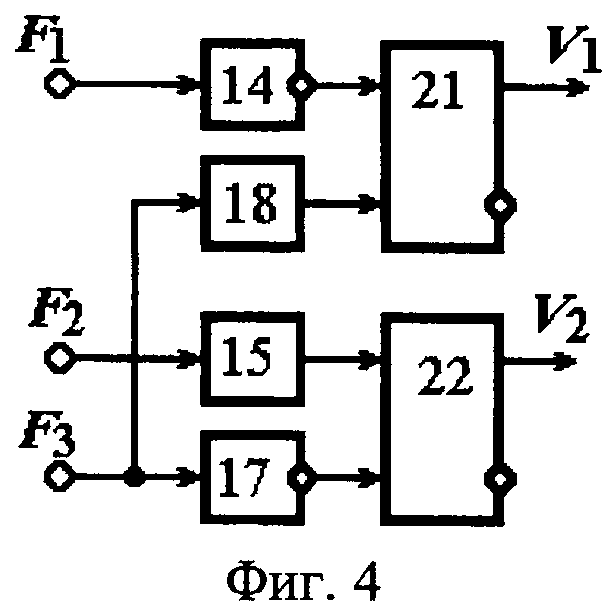
Узел формирования широтно-модулированных сигналов 12 регулятора 4 (5), осуществляющего двухстороннюю модуляцию напряжения питания (фиг.4), состоит из: четырех формирователей логического сигнала 14, 15 17, 18 и двух триггеров 21, 22. Первый вход узла 12 соединен с входом формирователя 14, второй вход узла 12 соединен с формирователем 15, третий вход узла 12 соединен с входом формирователей 17, 18, выход формирователя 14 соединен с первым входом триггера 21, выход формирователя 15 соединен с первым входом триггера 22, выход формирователя 17 соединен со вторым входом триггера 22, выход формирователя 18 соединен со вторым входом триггера 21, прямой выход триггера 21 соединен с первым выходом узла 12, прямой выход триггера 22 соединен со вторым выходом узла 12.
Мостовой инвертор 13, реализующий управление током фазной обмотки вентильного электродвигателя 1 в режимах потребления и рекуперации энергии (фиг.5), состоит из формирователя логического сигнала 23, четырех логических элементов 2И 24-27, четырех ключевых элементов 28-31 и четырех диодов 32-35. Первый управляющий вход мостового инвертора 13 соединен с входом формирователя 23, выход формирователя 23 соединен со вторыми входами логических элементов 24-27, второй управляющий вход мостового инвертора 13 соединен с первыми входами логических элементов 24, 26, третий управляющий вход мостового инвертора 13 соединен с первыми входами логических элементов 25, 27, выход логического элемента 24 соединен с управляющим входом ключевого элемента 28, выход логического элемента 25 соединен с управляющим входом ключевого элемента 29, выход логического элемента 26 соединен с управляющим входом ключевого элемента 30, выход логического элемента 27 соединен с управляющим входом ключевого элемента 31, первый силовой вывод ключевого элемента 28 соединен со вторым выводом диода 32 и с силовым входом мостового инвертора 13, второй силовой вывод ключевого элемента 28 соединен с первым выводом диода 32, с первым силовым выходом мостового инвертора 13, с первым силовым выводом ключевого элемента 29 и со вторым выводом диода 33, второй силовой вывод ключевого элемента 29 соединен с первым выводом диода 33 и с общим нулевым выводом, первый силовой вывод ключевого элемента 30 соединен со вторым выводом диода 34 и с силовым входом мостового инвертора 13, второй силовой вывод ключевого элемента 30 соединен с первым выводом диода 34, со вторым силовым выходом мостового инвертора 13, с первым силовым выводом ключевого элемента 31 и со вторым выводом диода 35, второй силовой вывод ключевого элемента 31 соединен с первым выводом диода 35 и с общим нулевым выводом.
Устройство, реализующее предлагаемый способ управления вращающим моментом вентильного электродвигателя (фиг.1), работает следующим образом. На выходе датчика частоты вращения 2 формируют сигнал ω, пропорциональный частоте вращения ротора электродвигателя 1, на выходе датчика положения ротора 3 формируют кодовые сигналы положения ротора
κф1=cosα;
κф2=cos(α+π/2),
где κф1, κф2 - определяют синус угла между векторами магнитных полей ротора и фазных обмоток вентильного электродвигателя 1 соответственно первой и второй.
Сигнал κф1 поступает на второй управляющий вход регулятора 4, сигнал κф2 поступает на второй управляющий вход регулятора 5, на первый управляющий вход регуляторов 4, 5 поступает сигнал задания Iз, на третий управляющий вход регуляторов 4, 5 поступает сигнал ω, на четвертый управляющий вход регуляторов 4, 5 поступает сигнал синхронизации tс, на силовой вход регуляторов 4, 5 поступает напряжение питания Uп.
В каждом из регуляторов 4, 5 на выходе узла умножения 8 в соответствии с выражением Iоп=κфIз формируют требуемый ток для соответствующей фазной обмотки, на выходе узла умножения 9 в соответствии с выражением UЭДС=κфκдω формируют расчетное значение ЭДС, наводимое в соответствующей фазной обмотке, на выходах узла 10 формируют пилообразные, спадающие до нуля сигналы разверток, значения которых к моменту коммутации ключевых элементов при t=tк равно  расчетному значению, с противоположным знаком, сигнала ошибки, определяемому узлом сравнения 7 в соответствии с выражением
расчетному значению, с противоположным знаком, сигнала ошибки, определяемому узлом сравнения 7 в соответствии с выражением  , где Iф - измеренное датчиком 6 значение тока фазной обмотки, на выходах узла 11 в соответствии с выражением
, где Iф - измеренное датчиком 6 значение тока фазной обмотки, на выходах узла 11 в соответствии с выражением  формируют управляющий сигнал для коммутации напряжения питания, на выходе узла 12 в соответствии с законом управления (1) формируют широтно-модулированный управляющий сигнал выходного напряжения V.
формируют управляющий сигнал для коммутации напряжения питания, на выходе узла 12 в соответствии с законом управления (1) формируют широтно-модулированный управляющий сигнал выходного напряжения V.
Таким образам регуляторы 4, 5 задают в первую и вторую обмотки вентильного электродвигателя 1 токи, значение которых определяется сигналом задания Iз и сигналами датчика положением ротора 3 соответственно.
При этом в регуляторах 4, 5, осуществляющих широтно-импульсную модуляцию переднего фронта напряжения питания, на выходах узла 10 формируют два сигнала развертки
отрицательное значение которых определяет расчетное значение сигнала ошибки  к моменту включения напряжения питания соответственно положительной, либо отрицательной полярности.
к моменту включения напряжения питания соответственно положительной, либо отрицательной полярности.
На выходах узла 11 формируют два управляющих сигнала F1 и F2, соответственно для включения напряжения питания положительной и отрицательной полярности.
В узле 12 (фиг.2) широтно-модулированные управляющие сигналы V1 и V2 для положительной и отрицательной полярности выходного напряжения формируют на прямом выходе триггеров 21, 22, которые представляют собой RS-триггеры, управление триггерами 21, 22 осуществляется в соответствии с логическими выражениями
где S21, S22 - сигналы, поступающие на S-вход триггеров 21, 22; R21, R22 - сигналы, поступающие на R-вход триггеров 21, 22; F1л, F2л - логическое значение управляющих сигналов F1, F2; tс(0) - логическое значение сигнала tс при нулевом значении.
Такое формирование широтно-модулированных управляющих сигналов V1 и V2 соответствует закону управления (4).
При этом в регуляторах 4, 5, осуществляющих широтно-импульсную модуляцию заднего фронта напряжения питания, на выходах узла 10 формируют один сигнал развертки
отрицательное значение которого определяет расчетное значение сигнала ошибки  к моменту отключения напряжения питания как положительной, так и отрицательной полярности.
к моменту отключения напряжения питания как положительной, так и отрицательной полярности.
На выходе узла 11 формируют управляющий сигнал F3 для отключения напряжения питания как положительной, так и отрицательной полярности.
В узле 12 (фиг.3) широтно-модулированные управляющие сигналы V1 и V2 для положительной и отрицательной полярности выходного напряжения формируют на прямом выходе триггеров 21, 22, которые представляют собой RS-триггеры, управление триггерами 21, 22 осуществляется в соответствии с логическими выражениями
где F3л - логическое значение управляющего сигнала F1.
Такое формирование широтно-модулированных управляющих сигналов V1 и V2 соответствует закону управления (5).
При этом в регуляторах 4, 5, осуществляющих двухстороннюю широтно-импульсную модуляцию напряжения питания, на выходах узла 10 формируют три сигнала развертки
где  - второй сигнал синхронизации, сдвинутый на полпериода модуляции относительно сигнала tc.
- второй сигнал синхронизации, сдвинутый на полпериода модуляции относительно сигнала tc.
Отрицательное значение сигналов Y1, Y2 определяет расчетное значение сигнала ошибки к моменту включения напряжения питания соответственно положительной, либо отрицательной полярности, отрицательное значение сигнала Y3 определяет расчетное значение сигнала ошибки к моменту отключения напряжения питания как положительной, так и отрицательной полярности.
На выходах узла 11 формируют три управляющих сигнала F1, F2 и F3 соответственно F1, F2 для включения напряжения питания положительной и отрицательной полярности, a F3 для отключения напряжения питания как положительной, так и отрицательной полярности.
В узле 12 (фиг.4) широтно-модулированные управляющие сигналы V1 и V2 для положительной и отрицательной полярности выходного напряжения формируют на прямом выходе триггеров 21, 22, которые представляют собой RS-триггеры, управление триггерами 21, 22 осуществляется в соответствии с логическими выражениями




Такое формирование широтно-модулированных управляющих сигналов V1 и V2 соответствует закону управления (7).
При этом в мостовом инверторе (фиг.5,) осуществляющем управление вращающим моментом вентильного электродвигателя 1 в режимах потребления и рекуперации энергии, ключевые элементы переключают в соответствии с выражением
где VT1, VT2, VT3 и VT4 - сигналы, управляющие состоянием ключевых элементов соответственно 28, 29, 30 и 31; Iоп(лог) - логическое значение сигнала требуемого тока.
Такое переключение ключевых элементов 28-31 обеспечивает подачу требуемого напряжения на фазную обмотку вентильного электродвигателя 1 как в режиме потребления, так и в режиме рекуперации энергии.
Предложенный способ управления вращающим моментом вентильного двигателя 1 обеспечивает переключение импульсных элементов 28-31 мостового инвертора 13 при равенстве сигнала ошибки по току управляемой фазной обмотки и отрицательного значения сигнала развертки Y, участвующего в формировании соответствующего управляющего сигнала.
Литература
1. Бродовский В.Н., Иванов Е.С. Приводы с частотно-токовым управлением. М.: Энергия, 1974.
2. Казанцев Ю.М., Лекарев А.Ф. Разработка модели и синтез регулятора бесконтактного электропривода // Приборы и системы. Сер. Управление, контроль, диагностика 2003, №6, с.22-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ С ДВУХСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2309526C2 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2309525C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2264689C2 |
| ДВУХСТОРОННИЙ ШИРОТНО-ИМПУЛЬСНЫЙ МОДУЛЯТОР МОСТОВОГО ИНВЕРТОРА | 2005 |
|
RU2309524C2 |
| ОДНОСТОРОННИЙ ШИРОТНО-ИМПУЛЬСНЫЙ МОДУЛЯТОР МОСТОВОГО ИНВЕРТОРА | 2004 |
|
RU2309523C2 |
| Регулятор -фазного напряжения | 1978 |
|
SU788331A1 |
| СЛЕДЯЩИЙ ИНВЕРТОР С ОДНОСТОРОННЕЙ ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2264644C2 |
| ИМПУЛЬСНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012989C1 |
| Способ регулирования номинального тока управляющего электромагнита привода летательного аппарата и устройство для его осуществления | 2015 |
|
RU2606213C1 |
Изобретение относится к области электротехники и предназначено для управления вентильными двигателями с широким диапазоном регулирования частоты вращения. Технический результат - уменьшение зоны нечувствительности и увеличение точности регулирования вращающего момента вентильного электродвигателя в широком диапазоне частот вращения. Способ управления вращающимся моментом заключается в том, что при управлении вращающим моментом вентильного электродвигателя методами широтно-импульсной модуляции с формированием управляющего сигнала из суммы сигнала ошибки, вычисляемой как разность измеренного и требуемого тока фазной обмотки и спадающего до нуля пилообразного сигнала развертки, равного к моменту коммутации ключевых элементов расчетному значению сигнала ошибки, значение сигнала ошибки не превышает пульсирующей составляющей тока фазной обмотки от широтно-импульсной модуляции. 4 з.п. ф-лы, 5 ил.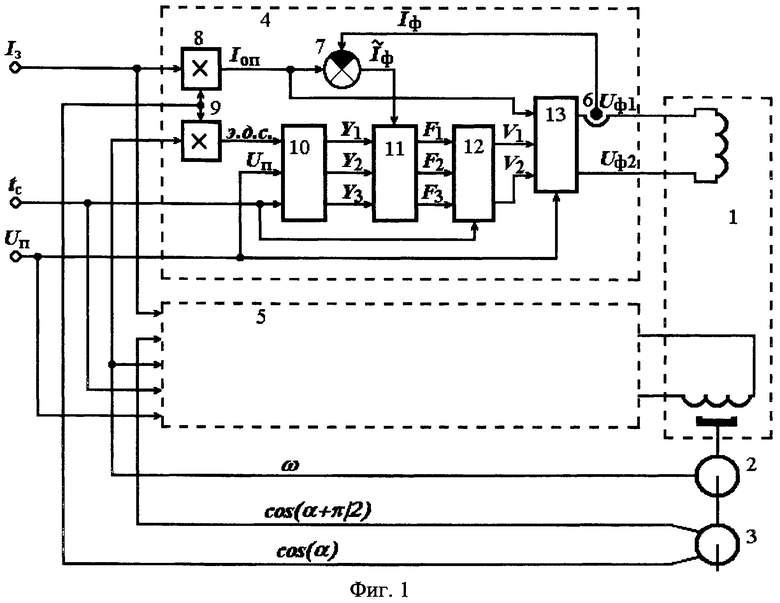
1. Способ управления вращающим моментом вентильного двигателя, заключающийся в том, что для каждой его фазной обмотки определяют сигнал требуемого тока как произведение сигнала задания, соответствующего синусоидального кодового сигнала положения ротора и коэффициента пропорциональности, измеряют ток в фазной обмотке, вычисляют сигнал ошибки как разность измеренного и требуемого тока, отличающийся тем, что дополнительно определяют расчетное значение ЭДС вращения фазной обмотки как произведение сигнала тахогенератора, соответствующего синусоидального кодового сигнала положения ротора и коэффициента пропорциональности, управляющий сигнал для переключения импульсных элементов мостового инвертора формируют из суммы сигнала ошибки и сигнала развертки, сигнал развертки формируют пилообразным, спадающим до нуля и равным к моменту коммутации ключевых элементов расчетному значению сигнала ошибки, формируют синхронизующий сигнал равным дробной части от деления текущего значения времени на длительность периода модуляции.
2. Способ управления по п.1, отличающийся тем, что для осуществления широтно-импульсной модуляции переднего фронта напряжения питания формируют два управляющих сигнала, первый для управления подключением к фазной обмотке напряжения питания положительной полярности, второй для - отрицательной полярности, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют отрицательным значением первого управляющего сигнала при условии отсутствия широтно-модулированного сигнала для отрицательной полярности, подключение к фазной обмотке напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют положительным значением второго управляющего сигнала при условии отсутствия широтно-модулированного сигнала для положительной полярности, отключение обоих широтно-модулированных сигналов производят при нулевом значении сигнала синхронизации, сигнал развертки для первого управляющего сигнала формируют равным произведению значений разности между напряжением питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на удвоенное значение индуктивности фазной обмотки, сигнал развертки для второго управляющего сигнала формируют равным произведению значений разности между отрицательным значением напряжения питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленной на удвоенное значение индуктивности фазной обмотки.
3. Способ управления по п.1, отличающийся тем, что для осуществления широтно-импульсной модуляции заднего фронта напряжения питания формируют один управляющий сигнал, сигнал развертки которого формируют равным произведению значений отрицательной полярности ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на удвоенное значение индуктивности фазной обмотки, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют при нулевом значении сигнала синхронизации и при условии отрицательного значения управляющего сигнала, подключения к обмотке электродвигателя напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют при нулевом значении сигнала синхронизации и при условии положительного значения управляющего сигнала, отключение широтно-модулированного сигнала для положительной полярности производят положительным значением управляющего сигнала, отключение широтно-модулированного сигнала для отрицательной полярности производят отрицательным значением управляющего сигнала.
4. Способ управления по п.1, отличающийся тем, что для осуществления двухсторонней широтно-импульсной модуляции напряжения питания формируют три управляющих сигнала, первый для управления подключением к фазной обмотке напряжения питания положительной полярности, второй для подключения к фазной обмотке напряжения питания отрицательной полярности, третий для управления отключением напряжения питания от фазной обмотки, подключение к фазной обмотке напряжения питания положительной полярности производят широтно-модулированным сигналом для положительной полярности, включение которого формируют при отрицательном значении первого управляющего сигнала, отключение широтно-модулированного сигнала для положительной полярности производят положительным значением третьего управляющего сигнала, подключения к обмотке электродвигателя напряжения питания отрицательной полярности производят широтно-модулированным сигналом для отрицательной полярности, включение которого формируют при положительном значении второго управляющего сигнала, отключение широтно-модулированного сигнала для отрицательной полярности производят отрицательным значением третьего управляющего сигнала, сигнал развертки для первого управляющего сигнала формируют равным произведению значений разности между напряжением питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на значение индуктивности фазной обмотки, сигнал развертки для второго управляющего сигнала формируют равным произведению значений разности между отрицательным значением напряжения питания и ЭДС вращения, длительности периода модуляции и разности между единицей и сигналом синхронизации, деленных на значение индуктивности фазной обмотки, сигнал развертки для третьего управляющего сигнала формируют равным произведению значений отрицательной полярности ЭДС вращения, длительности периода модуляции и разности между единицей и вторым сигналом синхронизации, деленных на значение индуктивности фазной обмотки, второй сигнал синхронизации формируют сдвинутым на полпериода модуляции относительно сигнала синхронизации.
5. Способ управления по п.1, отличающийся тем, что для управления вращающим моментом вентильного электродвигателя мостовым инвертором с четырьмя ключевыми элементами, шунтированными обратными диодами, в режимах потребления и рекуперации энергии формируют сигнал полярности требуемого тока фазной обмотки, при положительной полярности требуемого тока фазной обмотки подключение к ней напряжения питания положительной полярности производят включением ключевых элементов положительной диагонали, отключение напряжения питания положительной полярности производят выключением одного из ключевых элементов положительной диагонали, подключение к фазной обмотке напряжения питания отрицательной полярности производят выключением обоих ключевых элементов положительной диагонали, отключение напряжения питания отрицательной полярности производят включением одного из ключевых элементов положительной диагонали, при отрицательной полярности требуемого тока фазной обмотки, подключение к ней напряжения питания отрицательной полярности производят включением ключевых элементов отрицательной диагонали, отключение напряжения питания отрицательной полярности производят выключением одного из ключевых элементов отрицательной диагонали, подключение к фазной обмотке напряжения питания положительной полярности производят выключением обоих ключевых элементов отрицательной диагонали, отключение напряжения питания положительной полярности производят включением одного из ключевых элементов отрицательной диагонали.
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| ОСЦИЛЛИРУЮЩИЙ КОМБИНИРОВАННЫЙ ИНСТРУМЕНТ | 2005 |
|
RU2282529C1 |
| US 20090153084 A1, 18.06.2009 | |||
| DE 69616053 A1, 18.06.2009 | |||
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| EP 1485987 A1, 15.12.2004. | |||

