Заявляемое техническое решение относится к автоматическому управлению и предназначено для управления напряжением ограниченных по мощности источников постоянного тока, оно может найти широкое применение в управляемых источниках вторичного питания, работающих от источников тока, например солнечных батарей.
Известны преобразователи повышающего типа, содержащие дроссель, ключевой элемент, диод и конденсатор фильтра, в которых при замкнутом ключевом элементе ток от источника питания протекает через дроссель, запасая в нем энергию, диод при этом блокирует нагрузку и конденсатор фильтра от ключевого элемента, ток в нагрузку в этот промежуток времени поступает только от конденсатора фильтра, далее, когда ключевой элемент закрывается, ЭДС самоиндукции дросселя суммируется с входным напряжением источника питания и энергия тока дросселя отдается в нагрузку и конденсатор фильтра.
Известные способы регулирования выходного напряжения таких преобразователей основаны на коммутации ключевого элемента с коэффициентом заполнения γ, пропорциональным сигналу ошибки, равному разнице между выходным напряжением преобразователя и напряжением задания, при этом выходное напряжение зависит от напряжения питания Un, сопротивления r разрядной и зарядной цепи дросселя, сопротивления нагрузки Rн и коэффициента заполнения γ [1].
Недостатком этого способа регулирования является ограниченный диапазон регулирования kU=1-5 и его нелинейность, а также зависимость между сигналом ошибки и коэффициентом заполнения импульса.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ управления преобразователем понижающего типа, в котором коммутацию ключевых элементов осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, дифференцированный выходной сигнал формируют пропорциональным разности тока дросселя и выходного тока преобразователя, а сигнал развертки формируют как прогнозируемый для интервала после коммутации ключевых элементов дифференцированный выходной сигнал [2].
Известный способ обеспечивает коммутацию ключевого элемента при отсутствии статической ошибки и устойчивость управления в широком диапазоне задания параметров.
Недостаток известного способа заключается в невозможности получения выходного напряжения выше напряжения питания, а также в импульсном характере потребляемого тока, неприемлемом при питании от источников тока.
Цель предлагаемого изобретения состоит в расширении функциональных возможностей способа управления за счет его распространения на повышающие преобразователи.
Поставленная цель достигается тем, что коммутацию ключевых элементов повышающего преобразователя осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки и сигнала развертки, измеряют ток дросселя (источника питания) и выходной ток преобразователя, при этом сигнал развертки формируют пропорциональным разнице пилообразного сигнала с амплитудой, равной сигналу тока источника питания, и сигнала, равного выходному току преобразователя.
Сущность изобретения заключается в том, что предлагаемый способ управления основан на использовании для переключения ключевых элементов сигнала развертки, который формируется по критерию равенства нулю в установившемся режиме среднего за период повторения импульсов тока через конденсатор фильтра. При этом в окрестностях установившегося режима к моменту переключения ключевого элемента значение сигнала развертки становится равным нулю, что обеспечивает переключение ключевого элемента при отсутствии статической ошибки.
По критерию равенства нулю в установившемся режиме среднего за период повторения импульсов значения тока конденсатора фильтра для повышающего преобразователя с односторонней широтно-импульсной модуляцией имеем

где I1C, I2C - ток конденсатора фильтра на интервале до и после коммутации ключевого элемента; tк - момент коммутации ключевого элемента.
Если в качестве сигнала развертки принять текущее значение IC.ср, то после простых преобразований (2) получим

где tp=T{t/T} - временная координата для формирования сигнала развертки ({а} - дробная часть числа а).
Ток конденсатора фильтра при модуляции переднего фронта импульса равен: I1C=-Iвых, I2C=In- Iвых, а при модуляции заднего фронта - I1C=In-Iвых, I2C=-Iвых, где In - ток источника питания; Iвых - выходной ток преобразователя.
Подставив соответствующие выражения для тока конденсатора в уравнение (3) и приняв на интервалах коммутации ключевого элемента токи In, Iвых постоянными и на основе теоремы о среднем для определенного интеграла [3], получим сигнал развертки для управления с модуляцией переднего фронта импульса тока

который представляет собой разность между спадающим пилообразным сигналом с амплитудой, равной сигналу тока источника питания, и сигналом, равным выходному току преобразователя.
Для управления с модуляцией заднего фронта импульса тока - сигнал развертки
который представляет собой разность между нарастающим пилообразным сигналом с амплитудой, равной сигналу тока источника питания, и сигналом, равным сигналу выходного тока преобразователя.
При этом получаем закон управления вида
где х=Uвых-Uon - сигнал ошибки, Uвых - выходной сигнал; Uon - сигнал задания; km - коэффициент передачи сигнала развертки, определяющий динамические характеристики преобразователя [4]; tk - момент коммутации ключевого элемента, определяемый наименьшим по модулю отрицательным корнем уравнения F=0 при управлении модуляцией переднего фронта импульса тока источника питания и наименьшим положительным корнем уравнения F=0 при управлении модуляцией заднего фронта импульса тока источника питания.
Согласно (2) соответствующее переключение ключевого элемента в установившемся режиме должно происходить при IC.cp=0, что соответствует переходу через нуль сигнала развертки по (3, 4, 5), это в свою очередь обеспечивает переключение ключевого элемента при управлении по закону (6) при сигнале ошибки х(tk)=0.
На чертеже представлена схема преобразователя с широтно-импульсным регулированием, реализующего предлагаемый способ управления.
Преобразователь с широтно-импульсным регулированием, выполненный согласно предложенному способу управления, содержит источник питания (солнечную батарею) 1, дроссель 2, диод 3, конденсатор фильтра 4, ключевой элемент 5, узел сравнения 6, два датчика тока 7, 8, блок формирования управляющего сигнала 9, RS-триггер 10, управляемый генератор пилообразного сигнала 11 и узел вычитания 12. Выходная шина источника питания 1 соединена с входом дросселя 2 через датчик тока 7, выход дросселя 2 соединен с выходной шиной преобразователя Uвых через диод 3, кроме того, выход дросселя 2 шунтируется ключевым элементом 5, в цепь нагрузки преобразователя включен датчик тока 8, входы узла сравнения 6 соединены с выходной шиной преобразователя Uвых и шиной Uon опорного напряжения задания, выход датчика тока 7 соединен с управляющим входом генератора пилообразного сигнала 11, входы узла вычитания 12 соединены с выходом генератора пилообразного сигнала 11 и выходом датчика тока 8, входы блока формирования управляющего сигнала 9 соединены с выходом узла сравнения 6 и узла вычитания 12, выход блока формирования управляющего сигнала 9 соединен с S-входом RS-триггера 10, R-вход RS-триггера 10 и синхронизующий вход генератора пилообразного сигнала 11 соединены с шиной синхронизации Uсинх, выход RS-триггера 10 соединен с управляющим входом ключевого элемента 5.
Преобразователь с широтно-импульсным регулированием работает следующим образом: на выходе генератора пилообразного сигнала 11 по синхроимпульсам Uсинх формируется пилообразный сигнал с амплитудой, пропорциональной значению тока In источника питания 1, на выходе узла вычитания 12 формируется сигнал развертки Yp, на выходе узла сравнения 6 формируется сигнал ошибки х, на выходе блока формирования управляющего сигнала 9 в соответствии с (6) формируется управляющий сигнал F, RS-триггер 10 устанавливается в состояние VT=1 при появлении синхроимпульса Uсинх и в состояние VT=0 при появлении управляющего сигнала F, при замыкании ключевого элемента 5 ток In источника питания 1 протекает через дроссель 2, запасая в нем энергию, диод 3 при этом отсекает (блокирует) нагрузку и не позволяет конденсатору фильтра 4 разряжаться через замкнутый ключевой элемент 5, ток в нагрузку в этот промежуток времени поступает только от конденсатора фильтра 4, далее, когда ключевой элемент 5 размыкается, ток In источника питания 1 через диод 3 поступает в нагрузку и заряжает конденсатор фильтра 4, если в этом режиме не хватает энергии источника питания 1 (напряжение источника питания 1 меньше выходного напряжения преобразователя), то ЭДС самоиндукции дросселя 2 суммируется с выходным напряжением и энергия тока дросселя 2 отдается в нагрузку.
В преобразователе с управлением модуляцией переднего фронта импульса тока на выходе генератора пилообразного сигнала 11 формируется спадающий пилообразный сигнал, на выходе узла вычитания 12 формируется сигнал развертки Yp.n. по уравнению (4), по сигналу синхроимпульса Uсинх RS-триггер 10 устанавливается в состояние VT=1, при котором ключевой элемент 5 замыкается и отсекает (блокирует) нагрузку от источника питания 1, при наименьшем по модулю отрицательном корне уравнения (6) F=0 - RS-триггер 10 устанавливается в состояние VT=0, при котором ключевой элемент 5 размыкается и ток источника питания 1 поступает в нагрузку и заряжает конденсатор фильтра 4.
В преобразователе с управлением модуляцией заднего фронта импульса тока на выходе генератора пилообразного сигнала 11 формируется нарастающий пилообразный сигнал, на выходе узла вычитания 12 формируется сигнал развертки Yр.з. по уравнению (5), по сигналу синхроимпульса Uсинх RS-триггер 10 устанавливается в состояние VT=1, при котором ключевой элемент 5 размыкается и ток источника питания 1 поступает в нагрузку и заряжает конденсатор фильтра 4, при наименьшем положительном корне уравнения (6) F=0 - RS-триггер 10 устанавливается в состояние VT=0, при котором ключевой элемент 5 размыкается и отсекает (блокирует) нагрузку от источника питания 1.
Управление преобразователями осуществляется по критерию установившегося режима - равенству нулю среднего за период повторения импульсов значения тока конденсатора фильтра по (2), и реализовано формированием сигнала развертки по (3), которое в свою очередь в зависимости от вида модуляции преобразовано в (4) или (5).
Таким образом, предложенный способ управления позволяет обеспечить работу преобразователя при отсутствии статической ошибки, обеспечивая устойчивость установившегося режима в широком диапазоне задания параметров.
ЛИТЕРАТУРА
1. Семенов Б.Ю. Силовая электроника для любителей и профессионалов. М.: Солон-Р. 2001.
2. Казанцев Ю.М., Лекарев А.Ф. Метод прямого синтеза управления в преобразовательной технике // Электронные и электромеханические системы и устройства: Сб. науч. трудов НПЦ "Полюс". Томск: МГП "РАСКО" при изд-ве "Радио и связь", 2001. С.131-140.
3. Смирнов В.И. Курс высшей математики. М.: Наука, 1974. T.1.
4. Казанцев Ю.М., Чернышев А.И., Лекарев А.Ф. Формирование квазискользящих процессов в импульсных преобразователях с ШИМ // Электричество. 1993. №12. С.45-49.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ ПОВЫШАЮЩЕГО ТИПА | 2005 |
|
RU2309448C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2447478C1 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2013 |
|
RU2550360C1 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2197059C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2475805C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
Заявляемое техническое решение относится к автоматическому управлению и предназначено для управления напряжением ограниченных по мощности источников постоянного тока, оно может найти широкое применение в управляемых источниках вторичного питания, работающих от источников тока, например солнечных батарей. Технический результат предлагаемого изобретения состоит в расширении функциональных возможностей способа управления за счет его распространения на повышающие преобразователи. Технический результат достигается тем, что коммутацию ключевых элементов повышающего преобразователя осуществляют синхронизирующим и управляющим сигналами, управляющий сигнал формируют из суммы сигнала ошибки и сигнала развертки, измеряют ток дросселя (источника питания) и выходной ток преобразователя, при этом сигнал развертки формируют пропорциональным разнице пилообразного сигнала с амплитудой, равной сигналу тока источника питания, и сигнала, равного выходному току преобразователя. 1 ил.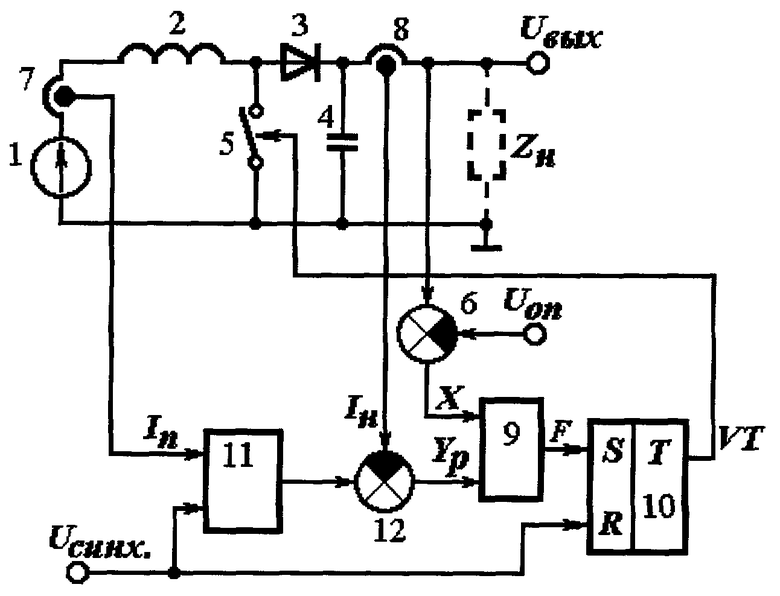
Способ питания нагрузки от солнечной батареи, заключающийся в том, что используют преобразователь повышающего типа, в котором коммутацию ключевых элементов осуществляют синхронизирующим и управляющим сигналами, измеряют выходной ток преобразователя и ток источника питания, формируют сигнал ошибки х равным разнице между выходным сигналом и сигналом задания, отличающийся тем, что формируют сигнал развертки Yp пропорциональным разнице пилообразного сигнала с амплитудой, равной сигналу тока источника питания, и сигнала, равного выходному току преобразователя, при этом коммутацию ключевых элементов осуществляют в соответствии с законом управления вида
где х=Uвых-Uоп - сигнал ошибки, Uвых - выходной сигнал; Uоп - сигнал задания; km - коэффициент передачи сигнала развертки; tp=T{t/T} - временная координата для формирования сигнала развертки; tк - момент коммутации ключевого элемента, определяемый наименьшим по модулю отрицательным корнем уравнения F=0 при управлении модуляцией переднего фронта импульса тока источника питания и наименьшим положительным корнем уравнения F=0 при управлении модуляцией заднего фронта импульса тока источника питания.
| ИМПУЛЬСНЫЙ РЕГУЛЯТОР постоянногоНАПРЯЖЕНИЯ | 0 |
|
SU242982A1 |
| Ключевой стабилизатор напряжения с повышением выходного напряжения | 1989 |
|
SU1654802A1 |
| Прибор для измерения скорости и направления водных потоков | 1958 |
|
SU117143A1 |

