Изобретение относится к каскадным электрическим приводам вращательного движения, состоящим из двух преимущественно асинхронных двигателей переменного тока, и может найти применение при создании низкооборотных безредукторных приводов, в том числе реверсивных, с регулируемой частотой вращения, а также при использовании любых других типов электрических двигателей.
Известные электрические двигатели как постоянного тока, так и переменного с короткозамкнутым или фазным ротором "внутренним магнитопроводом" характеризуются высокой частотой вращения в режимах, близких к номинальным, и для получения низких частот вращения требуют применения различных редукторов, что усложняет привод, снижает его надежность и не решает проблем снижения частоты вращения, так как частота вращения на выходе редуктора не может быть неограниченно приближена к нулю, тем более изменить знак (т.е. осуществить реверс привода).
Известен асинхронный электрический двигатель переменного тока с внутренним магнитопроводом короткозамкнутым ротором и наружным магнитопроводом статором с фазными обмотками [1] Такой двигатель характеризуется высокой частотой вращения, определяемой числом "пар" полюсов и частотой тока (синхронная частота вращения 3000, 1500, 1000 об/мин соответственно для одной, двух, трех "пар" полюсов при частоте тока 50 Гц). Реальная частота вращения двигателя при рабочих режимах меньше синхронной, наклон рабочей характеристики двигателя (ее "жесткость") n= f(M) зависит от параметров двигателя, в частности от сопротивления внутреннего магнитопровода ротора и питающего напряжения сети.
Такой двигатель принципиально не обеспечивает низких частот вращения (такой режим является нерабочим, а характеристика неустойчивой), кроме того, в случае применения понижающего редуктора такой двигатель не обеспечивает широкого диапазона регулирования частоты вращения, тем более с низким пределом, равным нулю, и возможностью реверса.
Известен каскадный электрический привод [2] представляющий собой каскадное соединение двух размещенных соосно асинхронных двигателей, каждый из которых содержит внутренний и внешний магнитопроводы с жестким соединением одноименных элементов двигателей их внутренних магнитопроводов на одном валу. Внешние магнитопроводы двигателей установлены неподвижно, выходным элементом привода является вал, на котором установлены внутренние магнитопроводы обоих двигателей. Электрическая схема соединения и питания двигателей привода обеспечивает регулирование частоты вращения роторов.
Однако такой привод не обеспечивает получения низких частот вращения (вплоть до нуля) и возможности реверсирования.
Целью изобретения является обеспечение устойчивости привода при низких частотах вращения и расширения диапазона регулирования частоты вращения.
Цель достигается тем, что в каскадном электрическом приводе, содержащем два установленных соосно электрических двигателя, каждый из которых включает внутренний магнитопровод, установленный на валу, и наружный магнитопровод, причем одна пара одноименных магнитопроводов электродвигателей жестко соединена между собой, а один из одноименных магнитопроводов другой пары установлен неподвижно (на каком-либо основании), другой магнитопровод другой пары установлен подвижно с возможностью вращения и является элементом привода. При этом в приводе жестко соединены между собой внутренние магнитопроводы электродвигателей, а наружный магнитопровод одного из них установлен подвижно с возможностью вращения и является выходным элементом.
Кроме того, в приводе наружные магнитопроводы электродвигателей жестко соединены между собой, а внутренний магнитопровод одного из двигателей установлен с возможностью вращения и является выходным элементом.
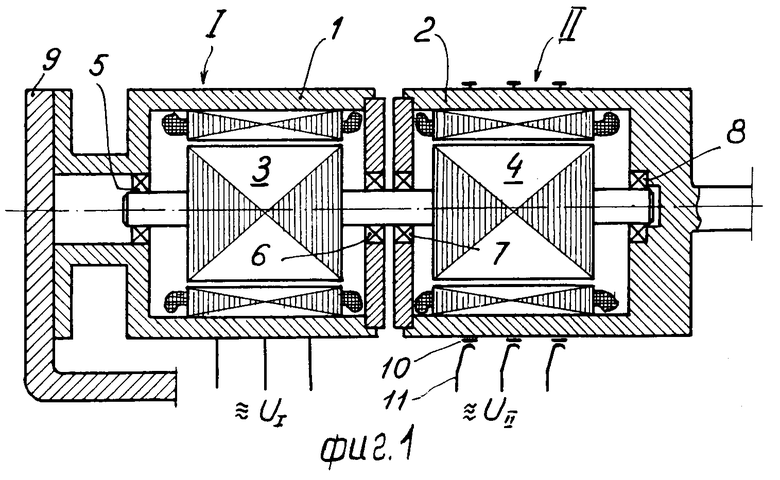
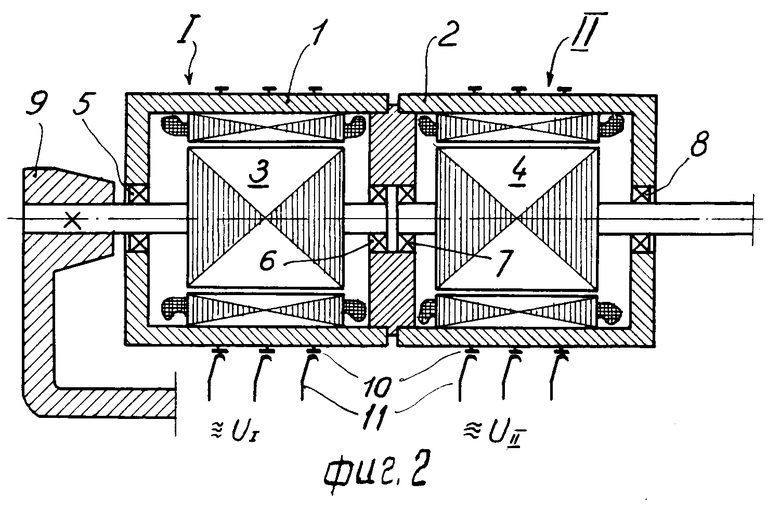
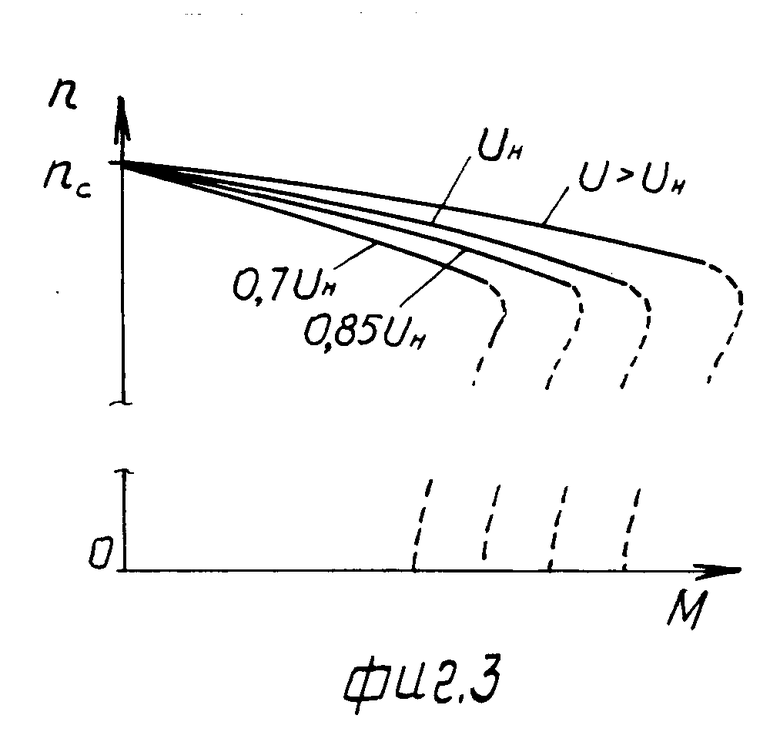
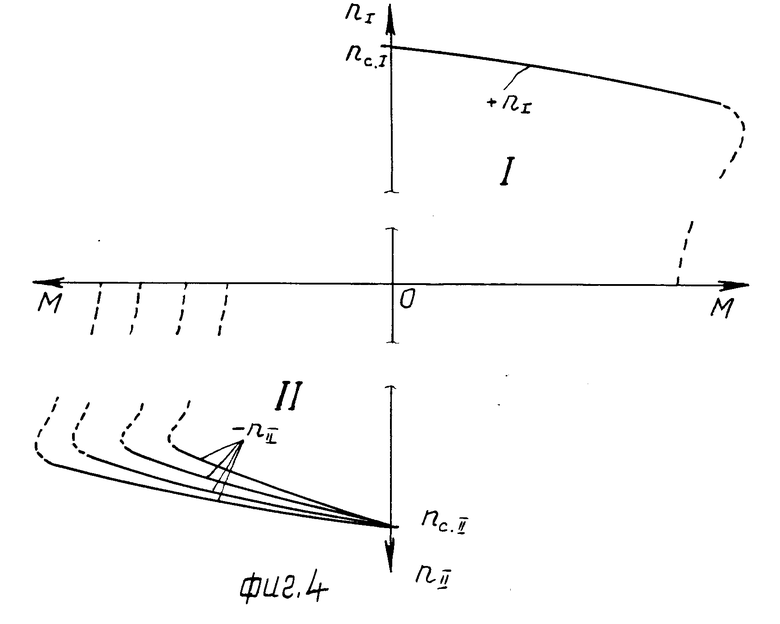
На фиг. 1 изображен привод с соединенным между собой внутренним магнитопроводами электродвигателей и установленным неподвижно наружным магнитопроводом одного из двигателей; на фиг. 2 привод с соединенными между собой наружными магнитопроводами и установленным неподвижно одним из внутренних магнитопроводов; на фиг. 3 показаны характеристики асинхронного двигателя при различных напряжениях питания; на фиг. 4 характеристики двух сблокированных в соответствии с фиг. 1 или 2 двигателей (при различных напряжениях питания одного из них); на фиг. 5 представлена схема формирования суммарной характеристики привода по фиг. 1 или 2 при одинаковых значениях синхронных частот вращения двигателей; на фиг. 6 то же при различных значениях синхронных частот вращения двигателей; на фиг. 7 показан один из возможных вариантов схемы автоматического регулирования частоты вращения привода.
Привод (фиг. 1) содержит два сблокированных асинхронных двигателя I и II, в состав которых входят соответственно наружные магнитопроводы 1 и 2 и размещенные в них на одном валу внутренние магнитопроводы 3 и 4, установленные с возможностью вращения относительно наружных магнитопроводов в подшипниках 5, 6 и 7, 8. Наружный магнитопровод 1 одного из двигателей установлен неподвижно на основании 9, наружный магнитопровод 2 другого двигателя, установленный на втором внутреннем магнитопроводе 4 с возможностью вращения, является выходным элементом агрегата привода. Подвод питающего напряжения к неподвижному наружному магнитопроводу 1 двигателя осуществляется обычным путем, к подвижному наружному магнитопроводу 2 с помощью контактных колец 10 и щеток 11.
В приводе могут быть соединены неподвижно между собой наружные магнитопроводы 1 и 2 с раздельными внутренними магнитопроводами 3 и 4 (фиг. 2), при этом неподвижно на основании 9 установлен внутренний магнитопровод 3 одного из двигателей, выходным элементом привода агрегата является вал внутреннего магнитопровода 4 другого двигателя. Подвод питающего напряжения к обмоткам наружных магнитопроводов 1 и 2, установленных с возможностью вращения, осуществляется с помощью контактных колец 10 и щеток 11.
Привод работает следующим образом.
На обмотки наружных магнитопроводов 1 и 2 подают питающее напряжение, сфазированное таким образом, чтобы направление вращения внутренних магнитопроводов 3 и 4 двигателей I и II относительно их наружных магнитопроводов 1 и 2 совпадало.
Поскольку в одном из двигателей привода наружный магнитопровод установлен с возможностью вращения относительно внутреннего магнитопровода (II на фиг. 1 и I на фиг. 2) и при работе вращается в направлении, противоположном направлению вращения внутреннего магнитопровода, принятому за положительное, то частота вращения выходного элемента привода (наружного магнитопровода 2 на фиг. 1 или внутреннего магнитопровода 4 на фиг. 2) равна алгебраической сумме частот вращения двигателей I и II (или иными словами разности частот вращения ).
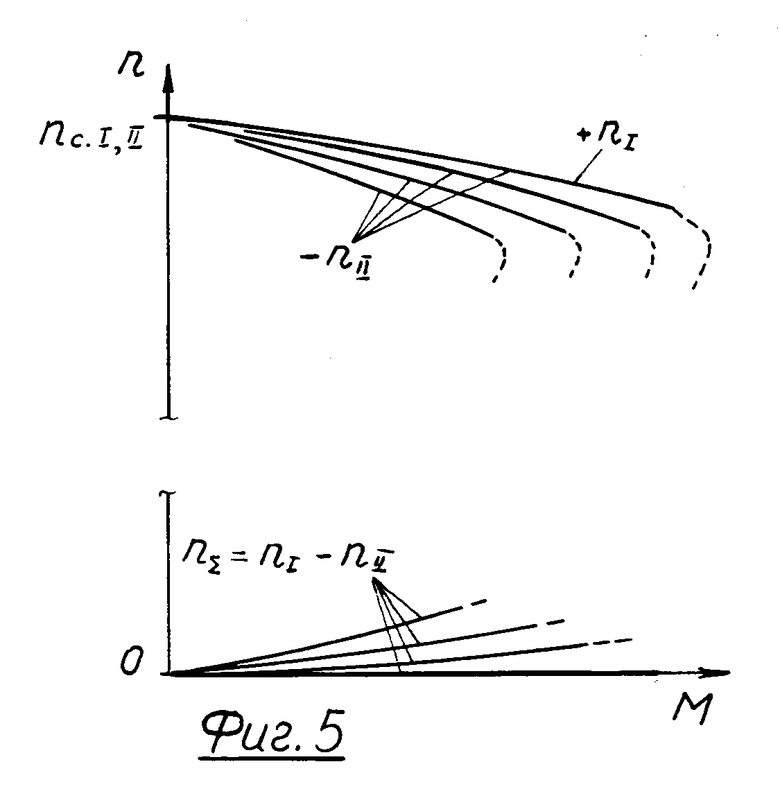
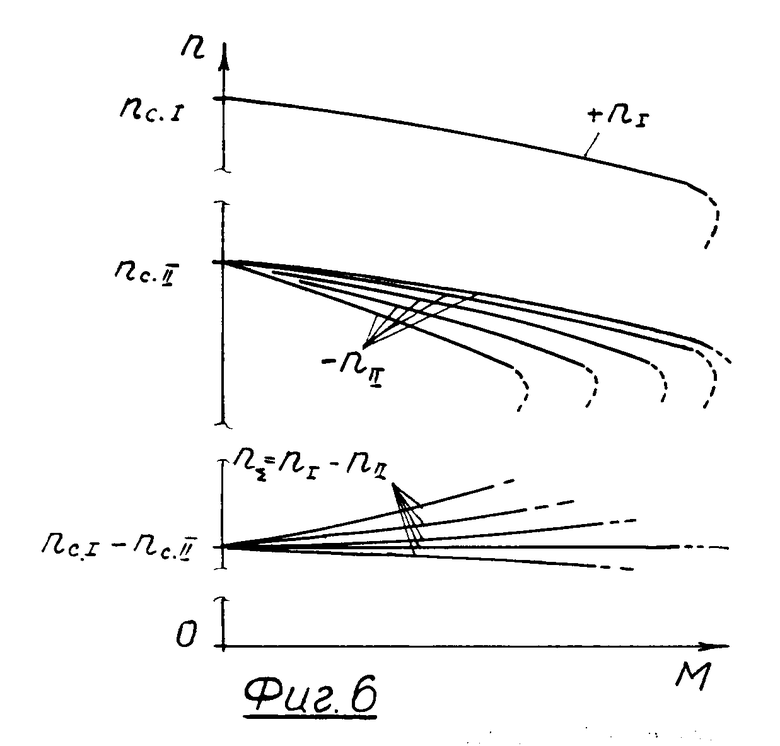
Вследствие различия наклона характеристик двигателей I и II, т.е. зависимости частоты вращения nI и nII от момента нагрузки при различных значениях напряжения питания U, т.е. nΣ=f(M; U), возможно управлять наклоном рабочей характеристики nf(M) агрегата привода. При одинаковом значении синхронных частот вращения двигателей эта характеристика проходит через ноль, при различных значениях синхронных частот вращения через точку M=0, n= (nc.I-nc.II).
На фиг. 3, 4, 5, 6 показана схема формирования суммарной характеристики привода. На фиг. 3 показаны типовые характеристики асинхронного двигателя в зависимости от величины питающего напряжения в долях от номинального Uн. Жесткость характеристик, т. е. их наклон, определяются также параметрами двигателя, в частности активным сопротивлением внутреннего магнитопровода. При объединении в один агрегат привод двух двигателей по схеме фиг. 1 или 2 эти характеристики могут быть представлены как показано на фиг. 4. Здесь характеристики двигателя II относятся к его выходному элементу (наружному магнитопроводу на фиг. 1 или внутреннему магнитопроводу на фиг. 2), направление вращения которого противоположно принятому за положительное вращение подвижного элемента двигателя I внутреннего магнитопровода 3 (4) на фиг. 1 или наружного магнитопровода 1 (2) на фиг. 2. Соответственно и крутящий момент, развиваемый двигателем II на выходном элементе, также имеет противоположное направление. Поскольку при работе привода двигатели I и II развивают одинаковые по величине моменты, то эти характеристики могут быть суммированы, как это показано на фиг. 5. Видно, что за счет изменения наклона рабочих характеристик одного из двигателей путем регулирования напряжения питания можно получить необходимую результирующую характеристику, согласовав ее с нагрузочной характеристикой приводимого устройства при заданной частоте вращения (возможно также и одновременное изменение напряжения питания обоих двигателей в противоположных направлениях).
При одинаковых синхронных частотах вращения двигателей привода результирующие характеристики привода проходят через точку М=0, n=0 (фиг. 5) с положительным или нулевым наклоном. В последнем случае привод фактически превращается в упор, препятствующий повороту приводимого устройства под действием внешнего момента.
При различных значениях синхронных частот двигателей привода результирующая характеристика проходит через точку М=0, n=(nc.I-nc.II), наклон характеристики определяется наклоном характеристик двигателей. Результирующая характеристика может быть с положительным наклоном, отрицательным (падающая характеристика) или с нулевым наклоном (абсолютно жесткая характеристика), в последнем случае привод превращается в синхронный с частотой nc.Σ nc.I-nc.II.
Из графиков фиг. 5, 6 видно, что привод может развивать максимальный крутящий момент при малых частотах вращения. Видно также, что этот момент близок к моменту, развиваемому двигателями при номинальных значениях напряжения.
Привод допускает реверсирование вращения. Это достигается путем соответствующего изменения величины напряжения на двигателях I и II.
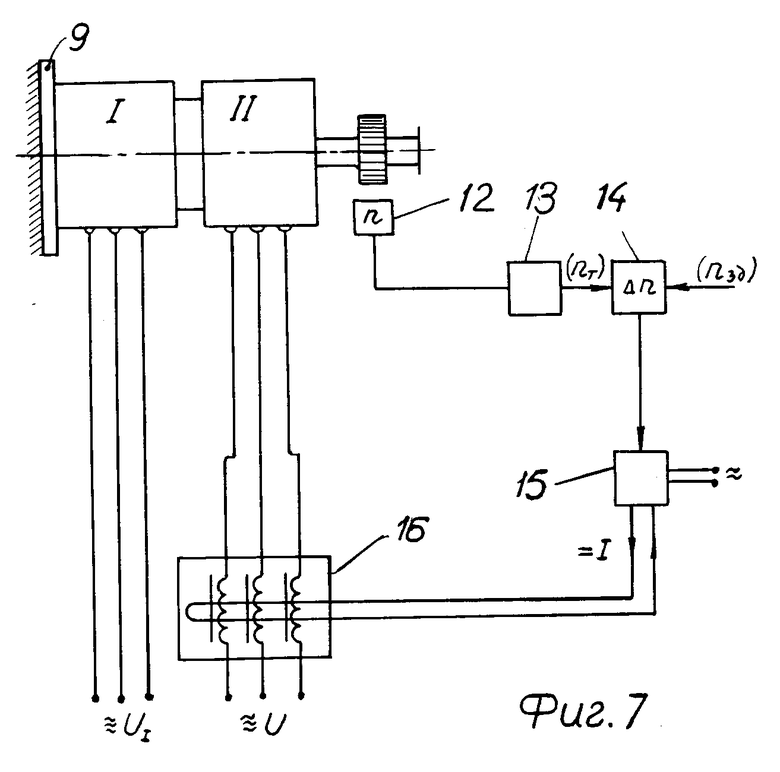
Управление частотой вращения привода не является проблемой и может быть решено известными в практике автоматического регулирования способами и устройствами. Один из возможных вариантов такой системы включает датчик 12 частоты вращения выходного элемента привода с преобразователем 13 текущей частоты nт вращения в нормированный сигнал, элемент 14 сравнения сигналов, пропорциональных заданному nзд и текущему nт значениям частот вращения, регулирующий блок 15, вырабатывающий управляющее воздействие по заданному закону регулирования (пропорциональному, интегральному, дифференциальному или их сочетаниям), и устройство 16, преобразующее управляющее воздействие в изменение напряжения питания двигателя (например, магнитные усилители).
Предлагаемый привод характеризуется высоким крутящим моментом при исключительно низких (по сравнению с известными асинхронными двигателями) частотах вращения и широким диапазоном изменения частоты вращения с нижним пределом, равным нулю.
Привод может найти применение как низкооборотный безредукторный привод различных механизмов, характеризуемых широким рабочим диапазоном частот вращения при нижнем пределе, практически равным нулю (например, швейных машин).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2402857C1 |
| Управляемый каскадный синхронный электрический привод | 2022 |
|
RU2779431C1 |
| ПРИВОД ЛИФТА | 2007 |
|
RU2359900C2 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2173927C1 |
| НИЗКООБОРОТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2283527C2 |
Изобретение относится к электроэнергетике и касается особенностей выполнения каскадных электрических приводов, в частности безредукторных, а также может быть использовано в любых других типах электрических двигателей. Сущность изобретения состоит в том, что в электрическом приводе, содержащем два соосно установленных электродвигателя, каждый включает внутренний магнитопровод на валу и наружной магнитопровод. Одна пара одноименных магнитопроводов электродвигателей соединена между собой жестко, а один из одноименных магнитопроводов другой пары установлен неподвижно. При этом согласно изобретению другой магнитопровод другой пары установлен с возможностью вращения и является выходным элементом привода. Изобретение обеспечивает получение привода с высоким крутящим моментом при исключительно низких (по сравнению с известными асинхронными двигателями) частотах вращения, а также с широким диапазоном изменения частоты вращения с нижним пределом, равным нулю. Привод может найти применение как низкооборотный безредукторный для различных механизмов с широким рабочим диапазоном частот вращения при нижнем пределе, практически равном нулю (например, в швейных машинах). 2 з. п. ф-лы, 7 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каскадное соединение двух асинхронных двигателей | 1948 |
|
SU79632A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
