Изобретение относится к каскадным электрическим приводам вращательного движения, состоящим из двух преимущественно асинхронных двигателей, и может найти применение при создании безредукторных приводов с регулируемой частой вращения от 0 до двойной номинальной при постоянном моменте или приводов с удвоенным моментом при постоянной номинальной скорости вращения, в том числе реверсивных, а также при использовании любых других типов электрических приводов.
Современные электрические двигатели как постоянного тока, так и переменного с короткозамкнутым или фазным ротором имеют высокую частоту вращения в режимах, близких к номинальным. Низкие частоты вращения могут быть получены двумя способами. Первый способ заключается в применении различных редукторов, что усложняет привод, снижает его надежность и не решает проблем снижения частоты вращения. При этом частота вращения на выходе редуктора не может быть близкой к нулю, тем более изменить знак и осуществить реверс привода. Второй способ требует применения дорогостоящего частотно управляемого электропривода, который в свою очередь не решает проблемы получения очень низких скоростей вращения, близких к 0, а также получения удвоенной синхронной скорости вращения при постоянном моменте или удвоенного момента при постоянной синхронной скорости. При этом частотные преобразователи загрязняют питающую сеть гармониками высших порядков, приводящих к искажению синусоидальности напряжения, т.е. снижают качество электроэнергии.
Известен асинхронный электрический двигатель переменного тока с короткозамкнутым ротором и статором с фазными обмотками [Копылов И.П. Электрические машины: учеб. для вузов / И.П.Копылов. - 2-е изд., перераб. - М.: Высш. шк., Логос, 2000. - 607 с.] Такой асинхронный двигатель имеет высокую частоту вращения, определяемую числом "пар" полюсов и частотой тока и напряжения питающей сети. Однако частота вращения двигателя при рабочих режимах меньше синхронной, так как наклон рабочей характеристики двигателя (ее "жесткость") n=f(M) зависит от параметров двигателя, в частности от сопротивления внутреннего магнитопровода ротора и питающего напряжения сети.
Такой двигатель не обеспечивает низких частот вращения, так как в этом случае режим его работы будет неустойчивым, кроме того, в случае применения понижающего редуктора такой двигатель не обеспечивает широкого диапазона регулирования частоты вращения, тем более с низким пределом, равным нулю, и возможностью реверса. Также такой двигатель не обеспечивает получение удвоенного значения момента на валу при постоянной номинальной скорости вращения или получения удвоенного значения момента при постоянной номинальной частоте вращения.
Прототипом является каскадный электрический привод, состоящий из двух соосно установленных электродвигателей, каждый включает внутренний магнитопровод на валу и наружный магнитопровод. Одна пара одноименных магнитопроводов электродвигателей соединена между собой жестко, а один из одноименных магнитопроводов другой пары установлен неподвижно. При этом другой магнитопровод другой пары установлен с возможностью вращения и является выходным элементом привода. (Пат. №2050672, 1995 г.)
И для этого устройства присущи недостатки. Устройство обеспечивает получение привода с высоким крутящим моментом только при низких частотах вращения, а также с широким диапазоном изменения частоты вращения с нижним пределом, равным нулю. Получение же больших скоростей вращения, близких к двойной номинальной, при постоянном значении величины момента или получение удвоенного момента при постоянной скорости вращения получить с помощью этого электропривода невозможно.
Задачей изобретения является расширение диапазона регулирования каскадного электрического привода.
Технический результат достигается тем, что обеспечивается получение больших скоростей вращения, близких к двойной номинальной, при постоянном значении величины момента или получение удвоенного момента при постоянной скорости вращения. Управляемый каскадный электрический привод, содержащий два установленных в корпусе соосно электродвигателя, каждый из которых состоит из ротора, жестко закрепленного на своем валу, и статора, причем статор одного электродвигателя неподвижный и закреплен на корпусе, статор другого подвижный и установлен с возможность вращения относительно вала, крепежное кольцо, установленное на валу электродвигателя с неподвижным статором, на кольце закреплены две электромагнитные муфты, одна с возможностью контакта с фрикционной прокладкой с выступом с корпусом подвижного статора, имеющего впадину, соосную с выступом, другая с возможностью контакта со своей фрикционной прокладкой с валом электродвигателя с подвижным статором, имеющим шлицевую выточку под фрикционную прокладку, кроме того, рабочие площади этих фрикционных прокладок, контактирующих с электромагнитными муфтами, выполнены равными для обеспечения одинаковой производительности электромагнитных муфт, а третья электромагнитная муфта закреплена на корпусе привода с возможностью контакта с фрикционной прокладкой с выступом с корпусом подвижного статора, имеющего впадину, соосную с выступом муфты.
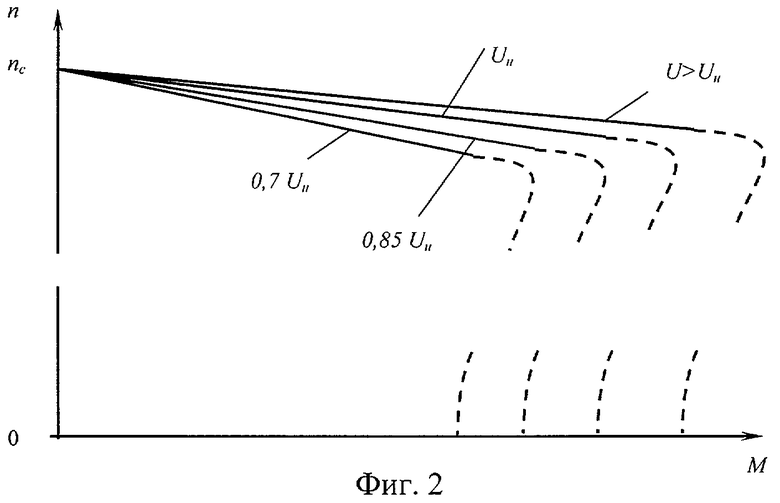
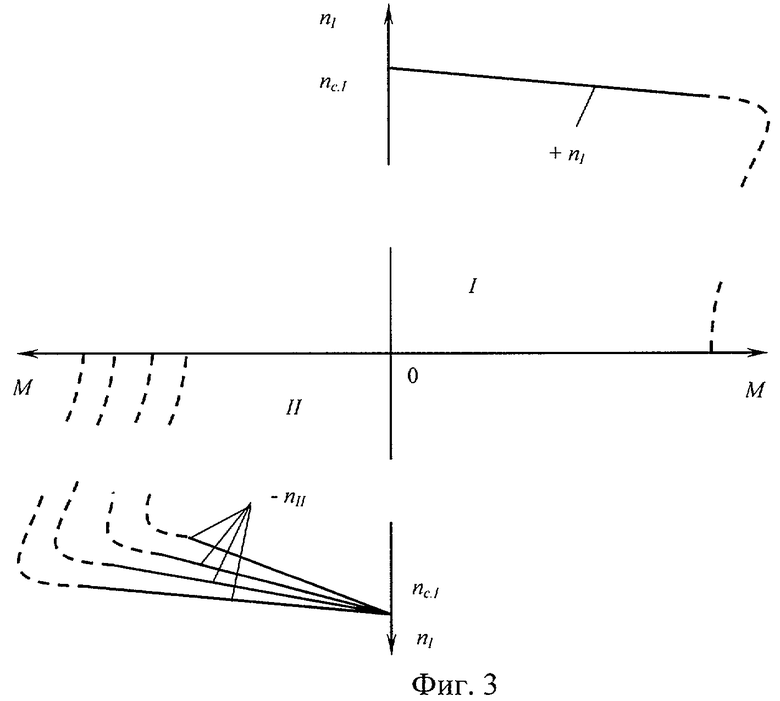
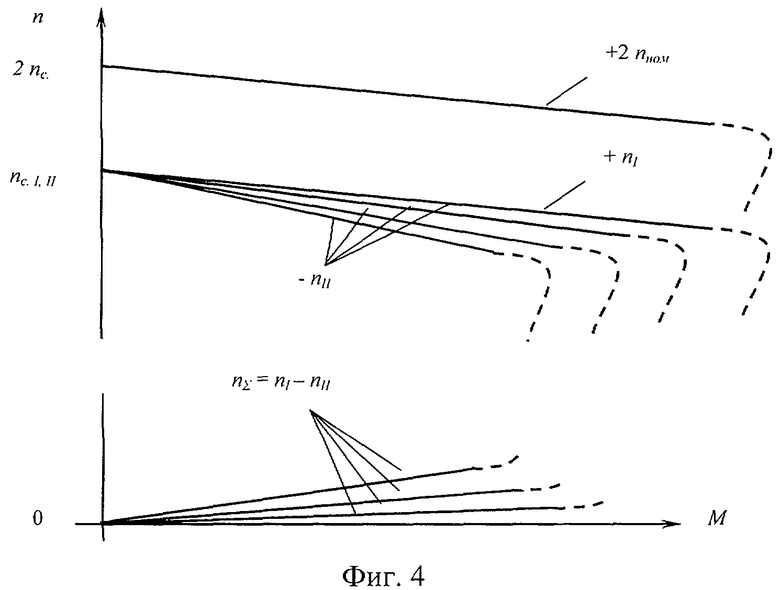
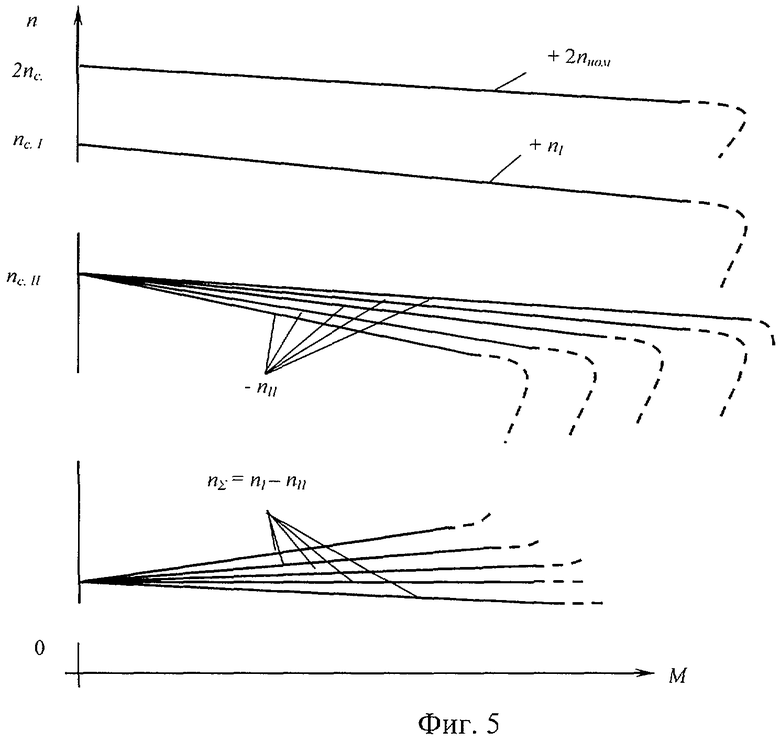
Предлагаемое устройство пояснено чертежами: на фиг.1 изображен общий вид устройства, на фиг.2 изображены характеристики асинхронного двигателя, на фит.3 изображены характеристики электропривода при разном напряжении питания, на фиг.4 изображены суммарные характеристики электропривода при одинаковых частотах вращения, на фиг.5 изображены суммарные характеристики электропривода при разных частотах вращения, на фиг.6 изображена схема автоматического регулирования частоты вращения электропривода.
Устройство состоит из электромагнитных муфт 1, 2, закрепленных на кольце 3. Кольцо 3 закреплено на валу 4, например, с помощью сварки и вращается вместе с валом 4. Электромагнитная муфта 5 закреплена на корпусе 6 и неподвижна. Статор 7 находится в неподвижном состоянии и закреплен на корпусе 6, а ротор 8 закреплен неподвижно и вращается с валом 4 на подшипниках 9 независимо от вращения вала 10. Статор 12 вращается свободно на валу 10 независимо от вращения вала на подшипниках 13. Ротор 14 жестко закреплен на валу 10 и вращается вместе с валом на подшипниках 11 и 13. Электромагнитная муфта 5 воздействует на корпус статора 12 при помощи фрикционной прокладки 15, имеющей выступ, заходящий в корпус статора 12. Электромагнитная муфта 1 соединяется с валом 10 при помощи фрикционной прокладки 16, а электромагнитная муфта 2 соединяется с корпусом статора 12 при помощи фрикционной прокладки 17. Причем фрикционная прокладка 17 имеет выступ, заходящий в корпус статора 12, а фрикционная прокладка 16 жестко закреплена шлицем вала 10. Рабочие площади фрикционных прокладок 16 и 17 должны быть одинаковы, для одинаковой производительности электромагнитных муфт 1 и 2. Корпус статора 7 жестко закреплен на корпусе 6.
Принцип работы
Для получения удвоенного значения момента при одинаковой частоте вращения необходимо произвести управление электромагнитными муфтами в следующем порядке. Подаем питающее напряжение на электромагнитные муфты 1 и 5 и отключаем от питания электромагнитную муфту 2. При этом ротор 8 вращается на валу 4, а статор 12 остается неподвижным, так как электромагнитная муфта 5 тормозит корпус статора 12. При помощи электромагнитной муфты 1 происходит зацепление ротора 14, вращающегося на валу 10. В итоге получаем удвоенный момент на валу 10 от двух асинхронных двигателей при одинаковой частоте вращения.
Для получения удвоенного значения скорости вращения при одинаковой величине вращающего момента необходимо произвести управление электромагнитными муфтами в следующем порядке. Подаем питающее напряжение на электромагнитную муфту 2 и отключаем электромагнитные муфты 1 и 5. При этом ротор 8 вращается на валу 4 и передает крутящий момент и скорость на статор 12 с помощью электромагнитной муфты 2. Ротор 14 вращается с асинхронной скоростью относительно статора 12. В итоге получаем на валу 10 удвоенное значение скорости вращения при одинаковой величине вращающего момента.
Получение плавных изменений, а также малых значений скорости и реверс осуществляется следующим образом.
Изменяя напряжение питания U на каждом из двигателей привода, можно изменять наклон характеристики каждого двигателя n=f(M,U). Следовательно, возможно управлять наклоном рабочей характеристики n=f(М) всего привода. При одинаковом значении синхронных частот вращения двигателей эта характеристика проходит через точку М=0, n=0, фиг.4. При различных значениях синхронных частот вращения двигателей характеристика проходит через точку М=0, n=ncI-ncII, фиг.5.
На фиг.2 показаны типовые характеристики асинхронного двигателя в зависимости от относительной величины питающего напряжения. На фиг.3, 4, 5 показан принцип формирования суммарной характеристики привода. Следует заметить, что параметры двигателя, в частности активное сопротивление ротора, влияют на жесткость характеристик, т.е. на их наклон. На фиг.3 представлены характеристики для каскада из двух двигателей. Здесь характеристики двигателя II относятся к его выходному элементу (либо к статору на фиг.1, либо к ротору на фиг.1), направление вращения которого противоположно принятому за положительное вращение. Соответственно и крутящий момент, развиваемый двигателем II на выходном элементе, также имеет противоположное направление. Так как при работе привода двигатели I и II развивают одинаковые по величине моменты, то их характеристики могут быть суммированы, фиг.4. Видно, что, изменяя напряжение питания, можно изменить наклон рабочих характеристик одного из двигателей и тем самым можно получить необходимую результирующую характеристику, согласованную с нагрузочной характеристикой рабочего механизма при заданной частоте вращения. Возможно также и одновременное изменение напряжения питания обоих двигателей в противоположных направлениях.
Если частоты вращения двигателей привода одинаковы, то результирующие характеристики привода проходят через точку М=0, n=0 с любым наклоном, фиг.4. Если наклон нулевой, то привод фактически превращается в упор, препятствующий повороту приводимого устройства под действием внешнего момента.
Если значения частот двигателей привода различны, то результирующая характеристика проходит через точку М=0, n=ncI-ncII, а наклон суммарной характеристики определяется наклоном характеристик двигателей. Результирующая характеристика может быть с положительным наклоном, отрицательным (падающая характеристика) или с нулевым наклоном (абсолютно жесткая характеристика), в последнем случае привод вращается с частотой n=ncI-ncII.
Из графиков на фиг.4, 5 видно, что привод может развивать максимальный крутящий момент при малых частотах вращения. Важно заметить то, что этот момент близок к моменту, развиваемому двигателями при номинальных значениях напряжения.
Привод допускает реверсирование вращения без переключения фаз. Это достигается путем соответствующего изменения величин напряжений на двигателях I и II.
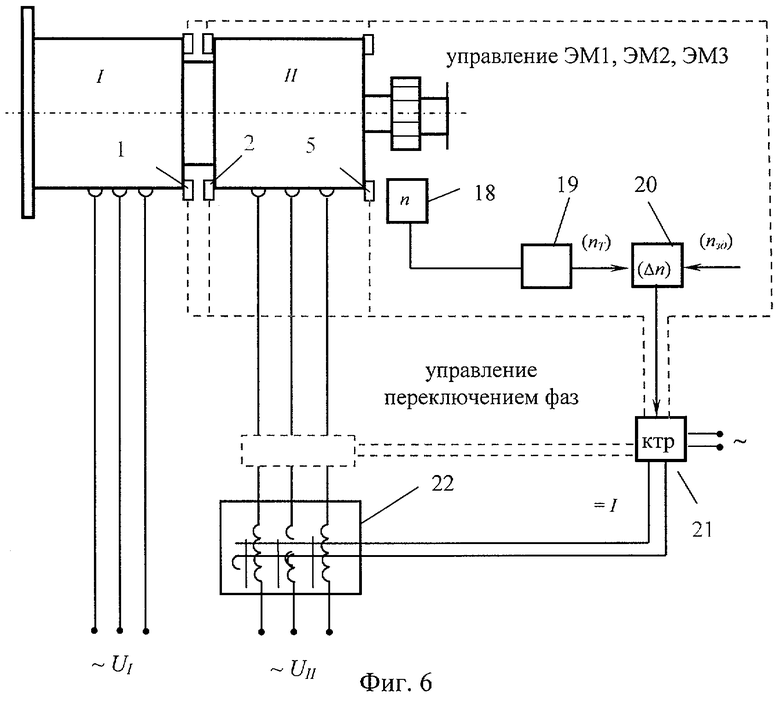
Управление частотой вращения привода может быть решено, например, предложенной нами схемой автоматического регулирования устройствами, представленной на фиг.6. Система состоит из датчика 18 частоты вращения выходного элемента привода с преобразователем 19 текущей частоты nm вращения в нормированный сигнал. Элемент 20 сравнивает сигналы, пропорциональные заданному nзад и текущему nm значениям частот вращения. Контроллер 21 вырабатывает управляющее воздействие по заданному закону регулирования (пропорциональному, интегральному, дифференциальному или их сочетаниям), осуществляет управление переключением фаз питания одного и пар полюсов одного из двигателей, а также вырабатывает управляющие сигналы на электромагнитные муфты 1, 2 и 5. Устройство 22 преобразует управляющее воздействие в изменение напряжения питания двигателя (например, с помощью магнитных усилителей).
Использование предложенных решений позволит расширить диапазон регулирования электропривода. Скорость вращения можно будет регулировать плавно от 0 до двойной номинальной при двухступенчатом каскаде. При увеличении ступеней каскада можно будет наращивать скорость вращения и расширять диапазон регулирования. Причем компоненты электропривода всегда будут работать режимах, близких к номинальному.
Изобретение найдет применение в промышленности, машиностроении, станкостроении, транспорте и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый каскадный синхронный электрический привод | 2022 |
|
RU2779431C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД С ЖИДКОСТНЫМ ТОКОСЪЕМОМ | 2011 |
|
RU2461947C1 |
| АКСИАЛЬНЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД С ЖИДКОСТНЫМ ТОКОСЪЕМОМ | 2012 |
|
RU2483415C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2173927C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ОБЩИМ РОТОРОМ | 2014 |
|
RU2556862C1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ | 2002 |
|
RU2199176C1 |
| Тяговый электропривод | 2020 |
|
RU2751372C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Система электропривода с автономным источником питания | 1984 |
|
SU1203684A1 |
Изобретение относится к области электротехники, в частности к каскадным электрическим приводам вращательного движения, и может быть использовано при создании безредукторных приводов с регулируемой частотой от 0 до двойной номинальной при постоянной номинальной скорости вращения, в том числе реверсивных и любых других типов приводов. Предлагаемый управляемый каскадный электрический привод, содержащий два электродвигателя, установленных в корпусе соосно, каждый из которых состоит из ротора, жестко закрепленного на своем валу, и статора, причем статор одного электродвигателя выполнен неподвижным и закреплен на корпусе, а статор другого - выполнен подвижным и установлен с возможностью свободного вращения относительно вала, согласно данному изобретению дополнительно содержит крепежное кольцо, жестко закрепленное на валу электродвигателя с неподвижным статором, при этом на крепежном кольце закреплены две электромагнитные муфты, одна из которых имеет возможность контакта с фрикционной прокладкой, имеющей выступ, заходящий во впадину корпуса подвижного статора, соосную с указанным выступом, другая электромагнитная муфта имеет возможность контакта со своей фрикционной прокладкой и соединения при ее помощи с имеющим шлицевую выточку под данную фрикционную прокладку валом электродвигателя, статор которого подвижный, причем рабочие площади указанных двух фрикционных прокладок, контактирующих с указанными электромагнитными муфтами, выполнены равными для обеспечения одинаковой производительности данных электромагнитных муфт, при этом на корпусе привода закреплена третья электромагнитная муфта, имеющая возможность контакта с третьей фрикционной прокладкой, имеющей выступ, который заходит в корпус подвижного статора, имеющий впадину, соосную с указанным выступом третьей фрикционной прокладки. Технический результат, достигаемый при использовании данного изобретения, состоит в расширении диапазона регулирования каскадного электрического привода путем обеспечения возможности получения больших скоростей вращения, близких к двойной номинальной, при постоянном значении величины момента или возможности получения удвоенного момента при постоянной скорости вращения. 1 з.п. ф-лы, 6 ил.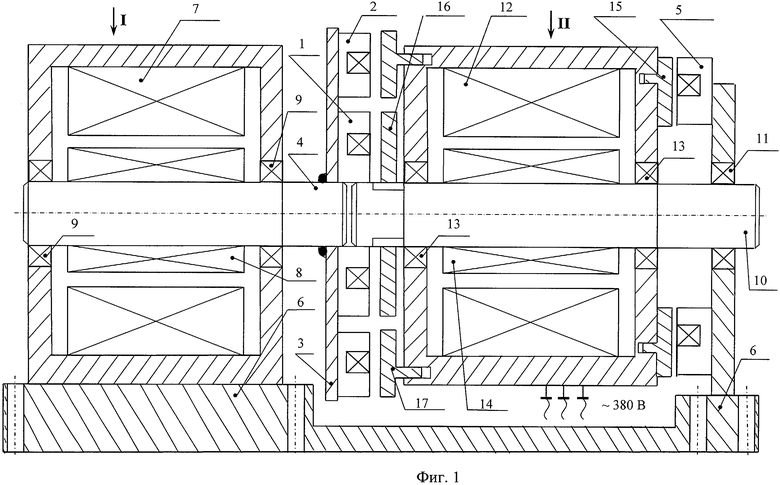
1. Управляемый каскадный электрический привод, содержащий два электродвигателя, установленных в корпусе соосно, каждый из которых состоит из ротора, жестко закрепленного на своем валу, и статора, причем статор одного электродвигателя выполнен неподвижным и закреплен на корпусе, а статор другого выполнен подвижным и установлен с возможностью свободного вращения относительно вала, отличающийся тем, что дополнительно содержит крепежное кольцо, жестко закрепленное на валу электродвигателя с неподвижным статором, при этом на крепежном кольце закреплены две электромагнитные муфты, одна из которых имеет возможность контакта с фрикционной прокладкой, имеющей выступ, заходящий во впадину корпуса подвижного статора, соосную с указанным выступом, другая электромагнитная муфта имеет возможностью контакта со своей фрикционной прокладкой и соединения при ее помощи с имеющим шлицевую выточку под данную фрикционную прокладку валом электродвигателя, статор которого подвижный, причем рабочие площади указанных двух фрикционных прокладок, контактирующих с указанными электромагнитными муфтами, выполнены равными для обеспечения одинаковой производительности данных электромагнитных муфт, при этом на корпусе привода закреплена третья электромагнитная муфта, имеющая возможностью контакта с третьей фрикционной прокладкой, имеющей выступ, который заходит в корпус подвижного статора, имеющий впадину, соосную с указанным выступом третьей фрикционной прокладки.
2. Управляемый каскадный электрический привод по п.1, отличающийся тем, что кольцо, на котором закреплены электромагнитные муфты, жестко закреплено на первом валу.
| КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1991 |
|
RU2050672C1 |
| Каскадное соединение двух асинхронных двигателей | 1948 |
|
SU79632A1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2173927C1 |
| Каскад электрических машин | 1949 |
|
SU80943A1 |
| Каскадный агрегат | 1946 |
|
SU69781A1 |
| RU 97100087 А, 27.01.1999 | |||
| CN 101262166 А, 10.09.2008 | |||
| US 5019755 А, 28.05.1991 | |||
| DE 3100494 A1, 05.08.1982 | |||
| Емкостной преобразователь перемещений | 1982 |
|
SU1043482A1 |
| КОПЫЛОВ И.П | |||
| Электрические машины | |||
| Учебник для вузов, 2-е изд., перераб | |||
| - М.: Высшая школа, Логос, 2000, с.607. | |||

