Изобретение относится к области электротехники, в частности к электрическим машинам с несколькими роторами и статорами и электроприводу, и может быть эффективно применено в промышленности, строительстве, транспорте и других отраслях.
Известен асинхронный многоскоростной электродвигатель (см. Москаленко В. В. Электрический привод. М. : Высшая школа, 1991, с.144), представляющий собой обычную асинхронную машину цилиндрического исполнения с короткозамкнутым ротором. Статорная обмотка данного электродвигателя состоит из двух одинаковых секций (полуобмоток). За счет разных схем их соединения может быть изменено число пар полюсов p асинхронного двигателя. В соответствии с формулой
ω0 = 2πf1/p = 2πn1,
где ω0 и n1 - угловая скорость вращения и частота вращения магнитного поля;
f1 - частота питающей сети,
это техническое решение позволяет изменять угловую скорость вращения магнитного поля и тем самым регулировать угловую скорость вращения асинхронного двигателя.
Однако такая конструкция не позволяет сохранить механическую мощность PMEX на валу постоянной при различных значениях p. Поэтому данный многоскоростной асинхронный электродвигатель в режиме с числом пар полюсов p/2 имеет завышенные габаритные размеры по сравнению с двигателем такой же угловой скорости вращения ω и такого же момента М, а стоимость такого привода в результате велика. Использование обмоток с переключением числа пар полюсов вызывает усложнение, связанное с применением силовой коммутационной аппаратуры. Также ухудшаются энергетические показатели двигателя и увеличиваются массогабаритные параметры.
Наиболее близким к изобретению по физической сущности и достигаемому результату является каскадный электрический привод (см. патент N 2050672, 1995 г. , авторы Чесноков Г.А., Колесников Д.П., Котов В.А., Иванов В.А.), содержащий два соединенных соосно электродвигателя, каждый из которых включает внутренний магнитопровод, установленный на валу, и наружный магнитопровод, причем пара одноименных магнитопроводов электродвигателей жестко соединены между собой, а один из одноименных магнитопроводов другой пары установлен неподвижно, тогда как второй магнитопровод другой пары установлен с возможностью вращения и является выходным элементом привода. Для получения угловой скорости вращения 2 ω и момента М внутренние магнитопроводы электродвигателей соединяют между собой жестко, а с наружного магнитопровода одного из них снимают измененную скорость 2ω и момент М. Механическая мощность, снимаемая с наружного магнитопровода, PMEX = (2ω)M = 2ωM. Если необходимо получить момент 2M и угловую скорость вращения ω, наружные магнитопроводы электродвигателей соединяют между собой жестко, а с внутреннего магнитопровода снимают момент 2M и угловую скорость вращения ω. Механическая мощность, снимаемая с внутреннего магнитопровода, PMEX = ω(2M) = 2ωM. Механические мощности, снимаемые с разных выходных элементов (внешний и внутренний магнитопроводы), равны.
Однако конструкция такого каскадного электрического привода сложна из-за необходимости штамповки листов цилиндрических внутренних и наружных магнитопроводов. Стоимость такого электропривода велика из-за большого расхода электротехнической стали, связанного с высоким процентом ее отходов при штамповке. Недостатком также являются большие габариты данной установки, так как соответствующие внутренний и внешний магнитопроводы расположены в своем отдельном корпусе и тот факт, что одинаковая механическая мощность снимается с разных выходных элементов - внутреннего и внешнего магнитопроводов.
Предлагаемое изобретение лишено вышеуказанных недостатков и решает задачу обеспечения возможности регулирования скорости и момента при постоянной механической мощности, снимаемой с вала.
Для этого управляемый каскадный электрический привод содержит два соединенных соосно электродвигателя, магнитные системы которых выполнены аксиальными и расположены в одном корпусе и на одном валу, который горизонтально закреплен в подшипниковых узлах корпуса, причем одной стороной статор первого электродвигателя присоединен к корпусу, а на другой стороне статора между его трехфазной обмоткой и валовым отверстием расположены катушки управляемых муфт, ротор первого электродвигателя, расположенный на подшипнике, с одной стороны имеет два кольца малого и большого диаметров из немагнитного материала, а с другой стороны - кольцеобразные щели, расположенные напротив колец, статор второго электродвигателя, на котором установлены скользящие контакты, расположен на подшипнике и имеет выступ в виде широкого тонкого кольца, заходящий в щель большего диаметра ротора первого электродвигателя, ротор второго электродвигателя жестко соединен с валом, а между ротором первого и статором второго электродвигателей расположена металлическая деталь в виде полого стакана, выступом заходящая в щель малого диаметра ротора первого электродвигателя, причем выходным элементом является общий вал.
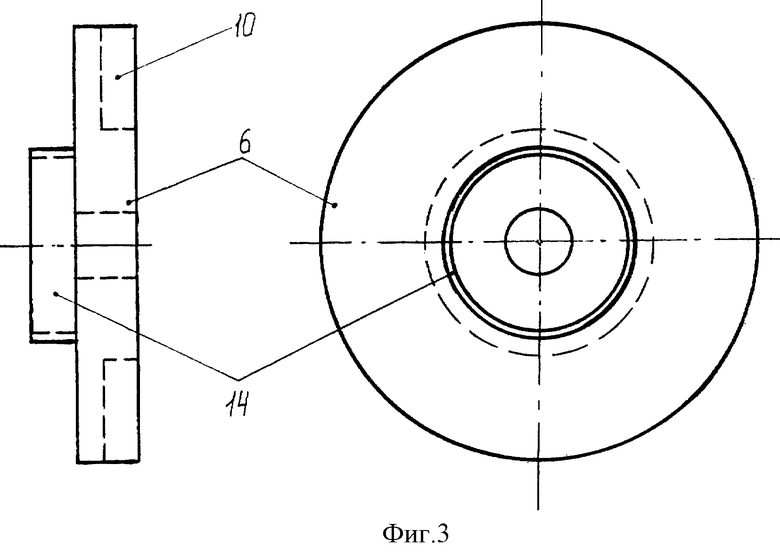
На фиг. 1 представлен общий вид предлагаемого управляемого каскадного электрического привода в разрезе, на фиг. 2 - магнитная система ротора первого электродвигателя, на фиг. 3 - общий вид и вид сбоку магнитной системы статора второго электродвигателя.
Управляемый каскадный электрический привод содержит (см. фиг. 1): корпус 1, горизонтально расположенный на подшипниках 2 вал 3, на котором расположены четыре магнитопровода с соответствующим чередованием: статор 4 и ротор 5 первого аксиального электродвигателя, статор 6 и ротор 7 второго аксиального электродвигателя, имеющие собственные обмотки, соответственно 8,9,10 и 11. Ротор 5 и статор 6 расположены на валу на подшипниках 12 и 13, тогда как статор 4 жестко соединен с корпусом, например, болтами, а ротор 7 жестко соединен с валом 3. Статор 6 имеет выступ 14 в виде широкого тонкого кольца для создания в процессе работы жесткого соединения с ротором 5. Между статором 6 и ротором 5 расположена металлическая деталь 15 в виде полого стакана. На роторе 5 с одной стороны расположены два кольца малого 16 и большого 17 диаметров из немагнитного материала, а с другой стороны имеются кольцеобразные щели 18 и 19, расположенные соответственно напротив колец 16 и 17. Одной стороной статор 4 присоединен к корпусу, а на другой стороне статора имеются расположенные в нем катушки управляемых муфт 20,21, находящиеся напротив колец 16 и 17. Своим выступом 14 статор 6 входит в щель 19 ротора 5, металлическая деталь 15 входит в щель 18 ротора 5, а свободное пространство щелей 19 и 18 заполнено ферромагнитным порошком 22. На статоре 6 второго электродвигателя расположены скользящие контакты 23, на которые подается напряжение питающей сети.
Ферромагнитный порошок 22, расположенный в щелях 18 и 19 (фиг. 2), может быть защищен от высыпания, например постоянными магнитами.
Выступ 14 статора 6 (фиг. 3) выполнен из того же материала, что и сам магнитопровод (статор 6).
Управляемый каскадный электрический привод работает следующим образом.
Для получения двойной угловой скорости вращения и момента М на валу 3 необходимо сначала на катушку 21 управляемой муфты, а потом и на скользящие контакты 23, подать напряжение питающей сети. При подключении катушки 21 управляемой муфты к напряжению сети создается магнитное поле, силовые линии которого проходят по магнитопроводу статора 4 вокруг катушки 21 далее через зазор попадают в магнитопровод ротора 5 и проходят вокруг кольца 17 из немагнитного материала, пересекая при этом щель 19, в которой располагаются выступ 14 статора 6 и ферромагнитный порошок 22, далее проходит между кольцами 17 и 16, потом через зазор и опять в магнитопровод статора 4. Под действием магнитного поля ферромагнитный порошок твердеет и создается тем самым жесткое соединение ротора 5 и статора 6. Далее обмотка 8 статора 4 подключается к питающей сети и создается вращающееся магнитное поле, частота вращения которого n1. Если ротор 5 неподвижен или вращается с частотой np1, меньшей n1, то вращающееся поле индуктирует в проводниках ротора 5 электродвижущую силу и по ним проходит ток, который, взаимодействуя с магнитным потоком, создает электромагнитный момент, увлекающий ротор 5 за вращающимся магнитным полем с частотой вращения
np1 = (l-s1)n1,
где s1 - скольжение первого аксиального электродвигателя.
После осуществления пуска первого аксиального электродвигателя на трехфазную обмотку 10 статора 6, вращающегося с частотой вращения np1, через скользящие контакты 23 подается напряжение питающей сети. Создается вращающееся магнитное поле, частота вращения которого
nc2=n1+np1=n1+(l-s1)n1= (2-s1)n1,
где n1 - частота вращения магнитного поля статора 6.
Если ротор 7 неподвижен или вращается с частотой np2, меньшей nc2, то вращающееся поле индуктирует в проводниках ротора 7 электродвижущую силу и по ним проходит ток, который, взаимодействуя с магнитным потоком, создает электромагнитный момент, увлекающий ротор 7 за вращающимся магнитным полем с частотой вращения.
np2= (l-s2)nc2=(l-s2)(2-s1)n1= (2-s1-s2+s2s1-s2)n1= [(2-s1-s2)-s2(l-s1)] n1,
где s2 - скольжение второго аксиального электродвигателя.
Так как величина s2(l-s1) очень мала, то выражение для частоты вращения ротора 7 принимает вид np2=(2-s1-s2)n1.
По известной формуле мощность PMEX1, снимаемая с вала 3, будет равна
где ωp2 и ω0 - угловые скорости вращения вала 3 и магнитного поля;
М - момент вращающегося магнитопровода 7 (ротора).
Для получения момента 2M и одинарной угловой скорости вращения на валу 3 необходимо отключить обмотку 21 и скользящие контакты 23 от напряжения питающей сети, затормозить статор 6, а потом подать напряжение питающей сети на катушку 20 управляемой муфты и скользящие контакты 23. Обмотка 21 отключается от питания, и ферромагнитный порошок размагничивается, разрушая жесткую связь между ротором 5 и статором 6. Когда на катушку 20 управляемой муфты подается питающее напряжение, она создает магнитное поле, силовые линии которого проходят по магнитопроводу статора 4 вокруг катушки 20, далее через зазор попадают в магнитопровод ротора 5 и проходят вокруг кольца 16 из немагнитного материала, пересекая при этом щель 18, в которой располагаются выступ металлической детали в виде стакана 15 и ферромагнитный порошок 22, далее проходит под кольцом 16, потом через зазор и опять в магнитопровод статора 4. Под действием магнитного поля ферромагнитный порошок твердеет и создается тем самым жесткое соединение ротора 5 с валом 3. Статор 6 тормозится, например, управляемой муфтой. Ротор 5 продолжает вращаться с частотой np1=(l-s1)n1. Так как статор 6 стал неподвижным, то его магнитное поле стало вращаться с частотой n1, а ротор 7 под действием электромагнитного момента М будет вращаться с частотой np2(l-s2)n1. На валу 3 будет иметь место частота вращения
np1,2=0.5(np1+np2)=0.5[(l-s1)n1+ (l-s1)n1]=0.5(2-s1-s2)n1.
Тогда по известной формуле мощность PMEX2, снимаемая с вала 3, будет равна
где ωp1,2 - угловая скорость вращения вала 3;
2M - двойной момент, созданный роторами 6 и 7.
В результате выводов получаем равенство механических мощностей
PMEX1=PMEX2.
Таким образом, данная конструкция позволяет снять с общего вала, который является выходным элементом электропривода, равные механические мощности для разных вариантов работы управляемого каскадного электрического привода - это двойная угловая скорость вращения вала при моменте М на валу и одинарная угловая скорость вращения вала при моменте 2M на валу.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД С ЖИДКОСТНЫМ ТОКОСЪЕМОМ | 2012 |
|
RU2483415C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ОБЩИМ РОТОРОМ | 2014 |
|
RU2556862C1 |
| НАСОС ДЛЯ ПЕРЕКАЧКИ НЕФТЕПРОДУКТОВ | 1995 |
|
RU2098667C1 |
| ДВУХВХОДОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2091967C1 |
| БЫТОВАЯ КОФЕМОЛКА | 1996 |
|
RU2124858C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 1999 |
|
RU2153368C1 |
| СДВОЕННЫЙ АКСИАЛЬНЫЙ ИНДУКЦИОННЫЙ РЕГУЛЯТОР | 1999 |
|
RU2170971C2 |
| ЭЛЕКТРОМАШИННЫЙ ИМПУЛЬСНЫЙ ФАЗОВРАЩАТЕЛЬ | 2019 |
|
RU2720352C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2402857C1 |
| ДВИГАТЕЛЬ-НАСОС ДЛЯ ПЕРЕКАЧКИ НЕФТЕПРОДУКТОВ | 1995 |
|
RU2088808C1 |

Использование: в промышленности, строительстве, транспорте и других отраслях. Технический результат заключается в регулировании скорости и момента при постоянной механической мощности, снимаемой с вала. Магнитные системы двух электродвигателей выполнены аксиальными и расположены в одном корпусе и на одном валу, который горизонтально закреплен в подшипниковых узлах корпуса. Одной стороной статор первого электродвигателя присоединен к корпусу. На другой его стороне между его трехфазной обмоткой и валовым отверстием расположены катушки управляемых муфт. Ротор первого электродвигателя, расположенный на подшипнике, с одной стороны имеет два кольца малого и большого диаметров из немагнитного материала, а с другой стороны - кольцеобразные щели, расположенные напротив колец. Статор второго электродвигателя, на котором установлены скользящие контакты, расположен на подшипнике и имеет выступ в виде широкого тонкого кольца, заходящий в щель большого диаметра ротора электродвигателя. Ротор второго электродвигателя жестко соединен с валом. Между ротором первого и статором второго электродвигателей расположена металлическая деталей в виде полого стакана, выступом заходящая в щель малого диаметра ротора первого электродвигателя. Выходным элементом является общий вал. 3 ил.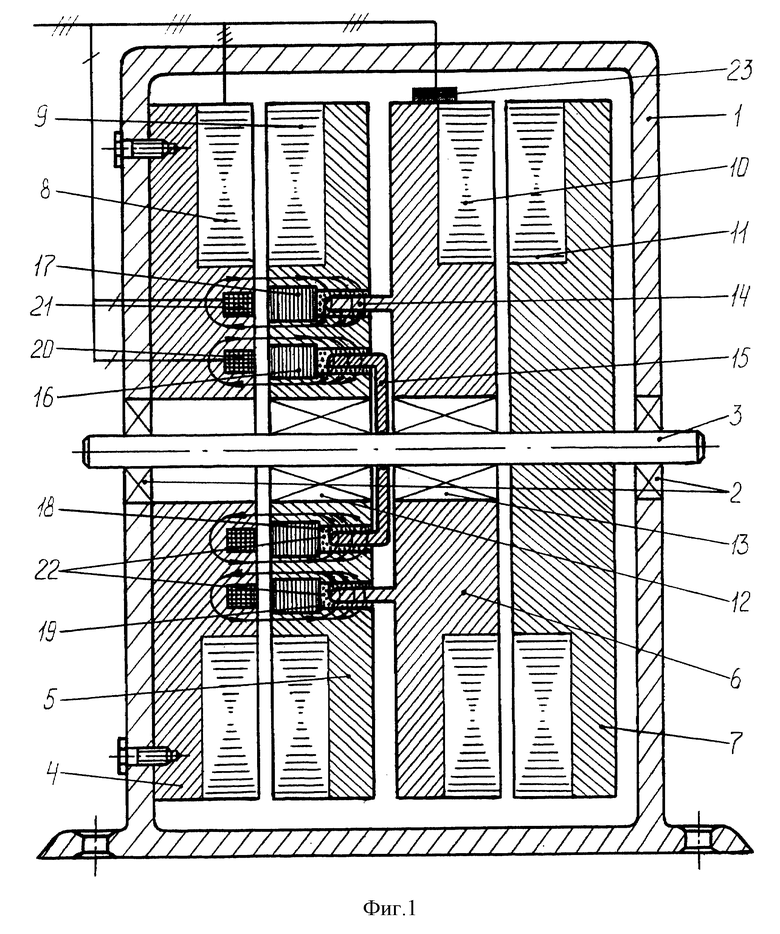
Управляемый каскадный электрический привод, содержащий два соединенных соосно электродвигателя, отличающийся тем, что магнитные системы двух электродвигателей выполнены аксиальными и расположены в одном корпусе и на общем валу, который горизонтально закреплен в подшипниковых узлах корпуса, причем одной стороной статор первого электродвигателя жестко соединен с корпусом, а на другой его стороне между его трехфазной обмоткой и валовым отверстием расположены катушки управляемых муфт, находящиеся напротив двух колец малого и большого диаметров из немагнитного материала расположенного на подшипнике ротора первого электродвигателя, с другой стороны которого выполнены кольцеобразные щели, свободное пространство которых заполнено ферромагнитным порошком, статор второго электродвигателя расположен на подшипнике и имеет выступ в виде широкого тонкого кольца из того же материала, что и сам статор, и заходит в щель большого диаметра ротора первого электродвигателя, обеспечивая при подключении к сети одной катушки управляемой муфты жесткую связь ротора первого электродвигателя и статора второго электродвигателя, ротор которого жестко соединен с валом, причем между ротором первого и статором второго электродвигателя расположена металлическая деталь в виде полого стакана, выступом заходящая в щель малого диаметра ротора первого электродвигателя, обеспечивающая при подаче напряжения питающей сети в другую катушку управляемой муфты жесткую связь ротора первого электродвигателя с общим валом, который является выходным, а на статоре второго электродвигателя расположены скользящие контакты, на которые подается напряжение питающей сети.
| КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1991 |
|
RU2050672C1 |
| Каскадное соединение двух асинхронных двигателей | 1948 |
|
SU79632A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПЕРЕХОДА В КАСКАДНОМ СОЕДИНЕНИИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ С ОДНОЙ СКОРОСТИ НА ДРУГУЮ | 1934 |
|
SU45673A1 |
| Реометрическая установка | 1984 |
|
SU1221350A1 |
| МОСКАЛЕНКО В.В | |||
| Электрический привод | |||
| -M.: Высшая школа, 1991, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
