Изобретение касается ткацкого станка с зажимными прокладчиками.
На фиг.1 дано частичное перспективное изображение предлагаемого боевого механизма с промежуточным корпусом в клинообразном исполнении; на фиг.2 вариант исполнения клинообразного промежуточного корпуса; на фиг.3 направляющая для регулировочного рычага и промежуточного корпуса; на фиг.4 второй вариант исполнения предлагаемого промежуточного корпуса; на фиг.5 элементы привода промежуточного корпуса согласно фиг.4; на фиг.6 третий вариант исполнения предлагаемого промежуточного корпуса.
На фиг.1 из боевого механизма 1 можно видеть следующие составные части: торсионный вал 2, боевую трубу 3 боевого механизма с рычагом 4 для непоказанного роликового рычага, через который взводится торсионный вал, частично показана погонялка 5 боевого механизма и зажимная трубка 6, которая фланцем 7 может стационарно прикрепляться к ткацкому станку. Корпус 8 с крышкой 9 служит для установления в последней с возможностью вращения держателя 10 торсионного вала (изображен схематически), а также регулировочного рычага 11 с кулисным камнем 12. Обе стрелки 13 и 14, показанные на фиг.1, указывают направление движения при бое прокладчика.
Кроме того, на фиг.1 показаны составные части регулировочного механизма, при помощи которого можно менять нулевое положение торсионного вала 2 через регулировочный рычаг 11, серводвигатель 15, например шаговый двигатель, который через присоединительный кабель 16 соединяется с непоказанной логической схемой регулирования положения торсионного вала, ходовой винт 17 с перемещающимся по нему ползуном 18, клиновой промежуточный корпус 19 с пазом 20, с которым взаимодействует ползун 18 и тем самым осуществляет перевод вращающегося движения ходового винта 17 в линейное движение промежуточного корпуса 19.
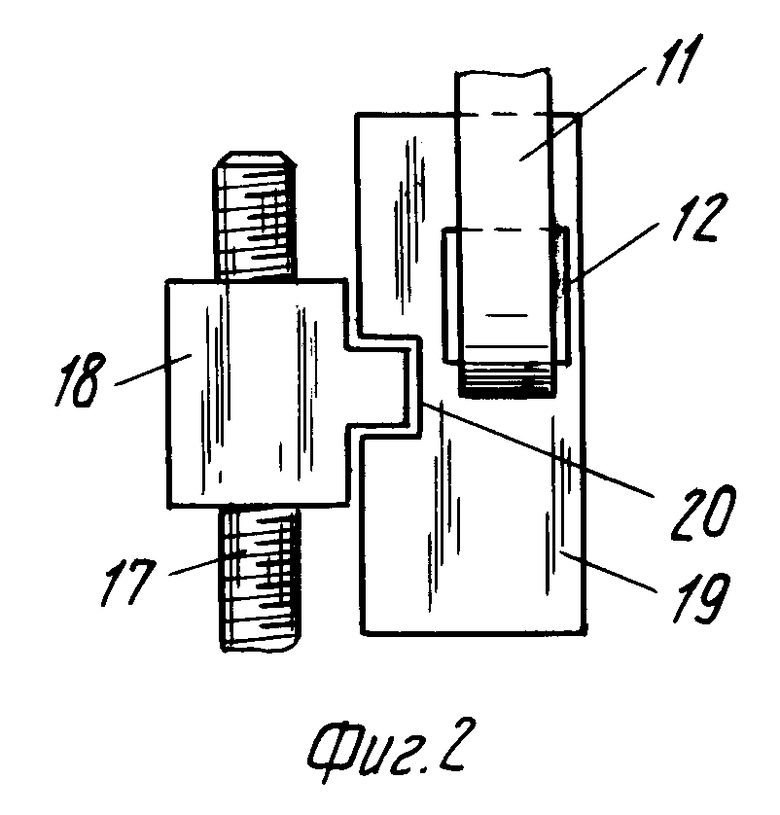
Регулировочный механизм, представленный на фиг.1 в упрощенном виде, имеет различные эквивалентные варианты исполнения. Например, ползун 18 может быть выполнен так, что он, как показан на фиг.2, длиннее ширины паза 20. Промежуточный корпус 19 может быть направлен не только вертикально, т.е. непосредственно на торсионный вал 2, но и под каким-либо другим углом, например, горизонтально. Кроме того, промежуточный корпус 19 может перемещаться без ползуна 18 как переходный элемент непосредственно при помощи ходового винта 17 серводвигателя 15 или вместо ползуна 18 может быть предусмотрена передача.
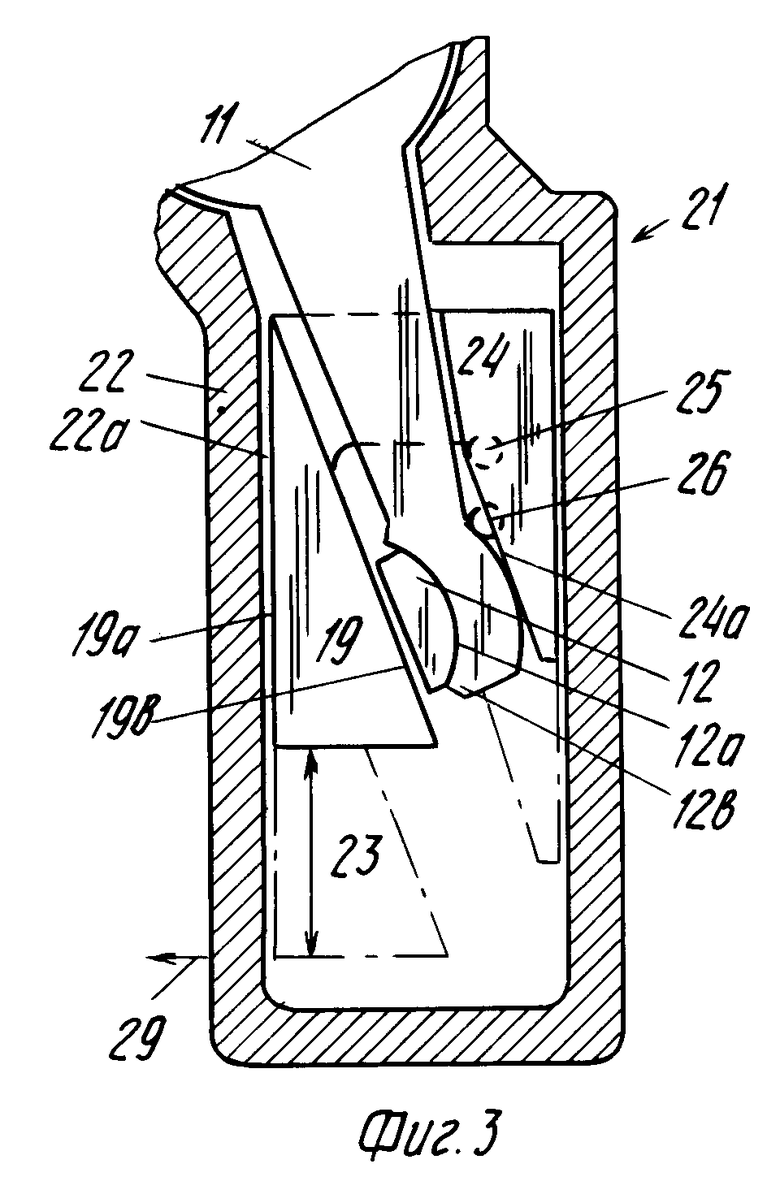
На фиг. 3 представлен продольный разрез направляющей 21 с клинообразным промежуточным корпусом 19 и регулировочным рычагом 11. Одна сторона 19а клина промежуточого корпуса 19 располагается на стационарной поверхности 22а скольжения, которая находится на внутренней стороне стенки 22 корпуса. Другая сторона 19в клина образует контактную поверхность относительно поверхности 12в скольжения кулисного камня 12. В свою очередь, кулисный камень 12 другой своей поверхностью 12а скольжения установлен с возможностью поворота в регулировочном рычаге 11.
Движение промежуточного корпуса 19, созданное непоказанным сервоприводом, способствует повороту регулировочного рычага 11, изменяющему нулевое положение торсиона. При помощи промежуточного корпуса 19 управляется усилие, исходящее от регулировочного рычага 11 на поверхность 22а скольжения. Это желательно, так как вследствие этого силы и удары, исходящие от торсионного вала 2, больше не действуют или действуют лишь в незначительной степени на сервопривод 15, а воспринимаются или абсорбируются корпусом направляющей 21, не вызывая при этом неприятностей.
Сила, действующая от регулировочного рычага 11 на промежуточный корпус 19, имеет составляющую, параллельную поверхности скольжения. Эта составляющая усилия, которая зависит от угла между обеими клиновыми поверхностями 19а и 19в, должна быть, например, настолько мала, чтобы возникающие на поверхности 22а скольжения силы трения предотвращали смещение промежуточного корпуса 19. Возможно, что упомянутая составляющая усилия частично воспринимается сервоприводом 15. Сила тяжести промежуточного корпуса 19 также может восприниматься сервоприводом.
Смещение промежуточного корпуса 19 при помощи серводвигателя 15 целесообразно производить при разгруженном торсионном вале, т.е. непосредственно после прокидки. Затем серводвигатель 15 должен выполнять работу только против сил трения и тяжести промежуточного корпуса 19, Двусторонней стрелкой 23 на фиг. 3 показан ход, на который может смещаться промежуточный корпус 19. Этот ход соответствует изменению нулевого положения торсиона на угол порядка 10о.
В связи с ударным нагружением при прокидке на регулировочный рычаг 11 действуют силы, вызывающие отрыв от клиновой поверхности 19в. Отрыв можно предотвращать при помощи направляющей поверхности 24, связанной с промежуточным корпусом 19. Как показано на фиг.3, направляющая поверхность 24а касается тыльной стороны регулировочного рычага 11 и вынуждает его оставаться на клиновой поверхности 19в.
Для того, чтобы предотвратить перегрузку торсионного вала 2 вследствие слишком большого проворота, положение промежуточного корпуса 19 можно контролировать, например, с помощью сенсоров. Так, например, при помощи двух индуктивных датчиков 25 и 26 (фиг.3) можно передавать информацию о положении промежуточного корпуса 19 в логическую схему регулирования торсионного вала. Предохранение от перегрузок торсионного вала 2 можно также осуществлять непосредственно при помощи наклеенных на торсионный вал 2 тензодатчиков 27 (с подключениями 28 и непоказанной измерительной схеме, см. фиг. 1).
Обычно после останова станка торсионный вал 2 находится в зажатом состоянии. Для того, чтобы при остановленном станке можно было изменять нулевое положение торсионного вала 2, торсионный вал 2 должен быть прежде всего освобожден от затяжки. С этой точки зрения целесообразно, чтобы между направляющей 21 (фиг. 3) и зажимной трубкой 6 (фиг.1) было предусмотрено разъемное соединение (не показано), вследствие разъединения которого направляющая 21 отклоняется в направлении стрелки 29 и тем самым может быть освобожден от зажатия торсионный вал 2.
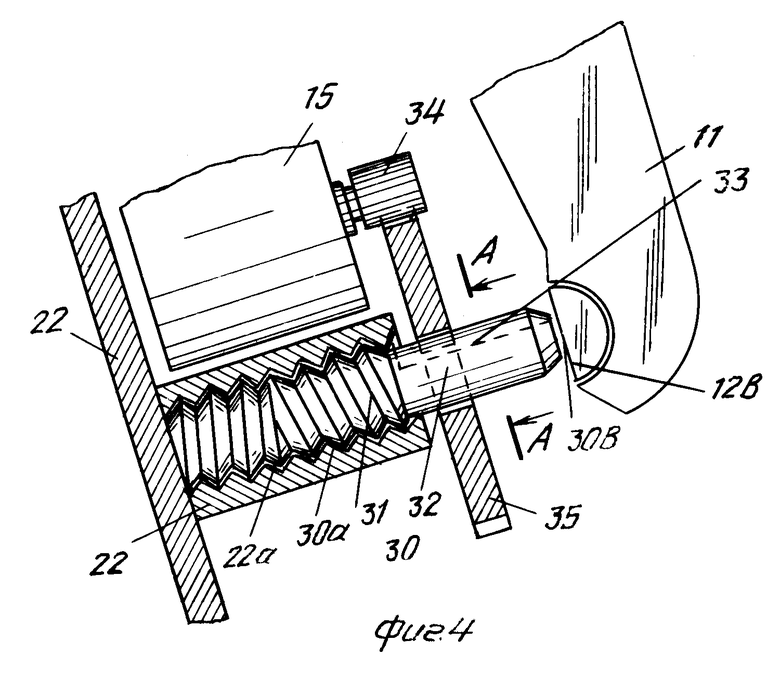
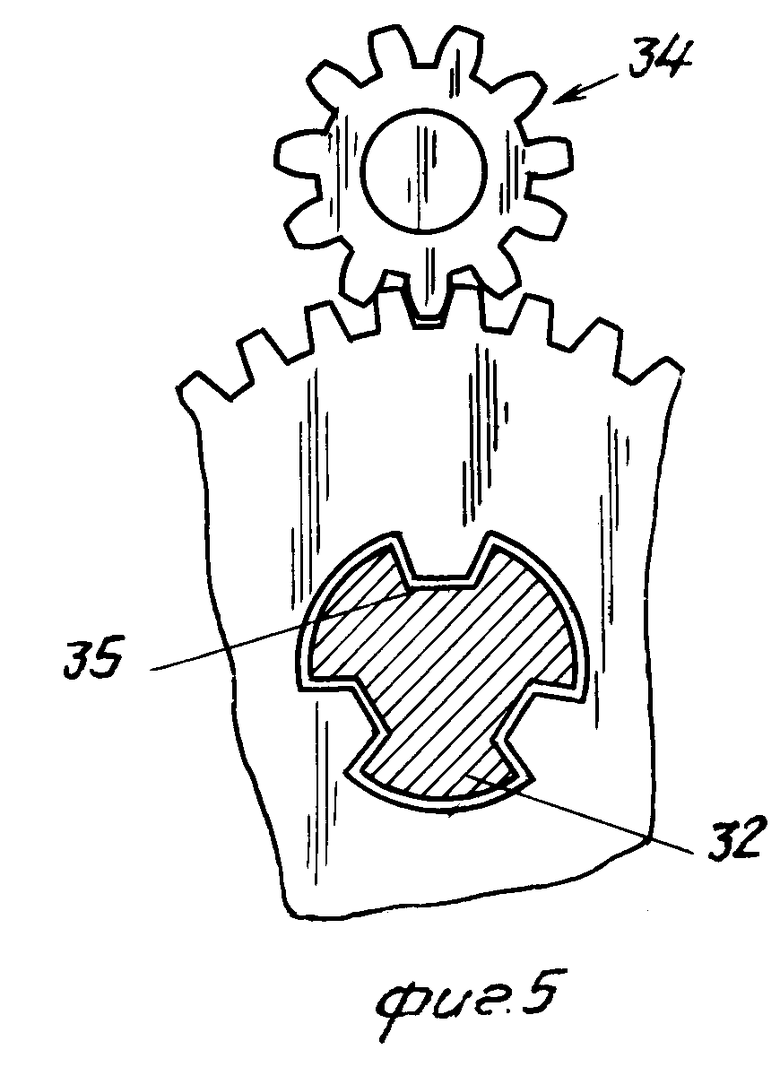
Вторым вариантом промежуточного корпуса, представленного на фиг.4, является винт 30, который состоит из резьбовой части 31 и части 32 с клиновыми пазами 33. Этот винт 30 перемещается посредством вращения при помощи шестерни 34 серводвигателя 15 и зубчатого колеса 35. На фиг.5 представлен вид сверху на оба зубчатых колеса 34 и 35, а также сечение части 32 по линии А-А на фиг.4.
Посредством внутренних зубьев зубчатого колеса 35, входящих в зацепление с пазами 33, промежуточный корпус поворачивается вокруг оси вращения, перпендикулярной поверхности 12в скольжения регулировочного рычага 11. Стационарная поверхность 22а скольжения является для поверхности 30а скольжения промежуточного корпуса 30 внутренней резьбовой втулки 22', которая крепится к стенке 22 корпуса. Очевидно, что вращение промежуточного корпуса 30 приводит к отклоняющему движению регулировочного рычага 11.
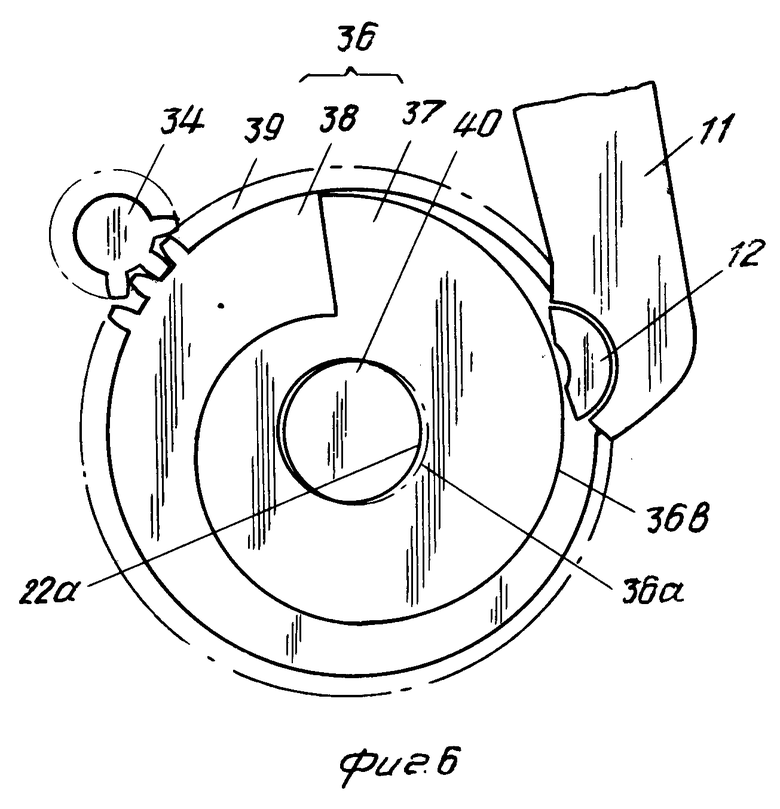
Третьим вариантом исполнения промежуточного корпуса, который представлен на фиг.6, является кулачок 36, который состоит из спиральной части 37 и приводной части 38 с зубчатым венцом 39. Этот промежуточный корпус 36 с возможностью вращения опирается на цапфу 40, которая опирается на корпус. Вращение промежуточного корпуса 36, создаваемое при помощи шестерни 38 непоказанного серводвигателя, осуществляется вокруг оси, проходящей параллельно оси поворота регулировочного рычага 11.
Одна поверхность 36а скольжения промежуточного корпуса 36 является круговой, а другая 36в спиральной. Неподвижная поверхность 22а скольжения находится на цапфе 40 внутри зоны, маркированной штрихпунктирными дугами. Так как поверхность 36в скольжения не имеет постоянной кривизны, целесообразно соответствующую поверхность скольжения кулисного камня 12 выполнять волнистой, как это помечено на фиг.6.
Регулировка нулевого положения торсионного вала должна осуществляться при незажатом торсионном вале. Целесообразно это осуществлять во время работы ткацкого станка. Регулировка нулевого положения может на основе управляющих сигналов производиться в шаговом режиме, причем шаг регулирования осуществляется непосредственно после прокидки, пока торсионный вал не зажат или зажат слабо.
Перед запланированным длительным перерывом в работе ткацкого станка, например, перед окончанием недели имеет смысл так регулировать нулевое положение, чтобы в течение времени, охватывающем несколько предшествующих перерыву циклов работы, зажимать торсионный вал все сильнее. Эта регулировка нулевой точки должна проходить настолько далеко, что при последующем холодном старте полетная скорость прокладчика достаточна уже при первой прокладке. Преобразование энергии в боевом механизме, улучшающееся в дальнейшей работе, позволяет вернуть нулевое положение торсионного вала путем пошагового регулирования снова в нормальное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА С ЗАЖИМНЫМИ ЧЕЛНОКАМИ | 1990 |
|
RU2071515C1 |
| ТКАЦКИЙ СТАНОК С ЗАЖИМНЫМИ ЧЕЛНОКАМИ | 1992 |
|
RU2046856C1 |
| ТОРМОЗ УТОЧНОЙ НИТИ ДЛЯ БЕСЧЕЛНОЧНЫХ ТКАЦКИХ СТАНКОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1991 |
|
RU2015221C1 |
| ТКАЦКИЙ СТАНОК С ЗАЖИМНЫМИ ЧЕЛНОКАМИ И СПОСОБ УСТРАНЕНИЯ ОБОРВАННОЙ УТОЧНОЙ НИТИ НА ЭТОМ СТАНКЕ | 1991 |
|
RU2051229C1 |
| Ткацкий станок с зажимными челноками | 1985 |
|
SU1407405A3 |
| Боевой механизм ткацкого станка | 1978 |
|
SU917703A3 |
| НИТЕНАТЯЖИТЕЛЬ | 1992 |
|
RU2037579C1 |
| Устройство для прокладывания уточной нити на ткацком станке с микропрокладчиками | 1988 |
|
SU1575947A3 |
| Ткацкий станок | 1988 |
|
SU1709917A3 |
| Ткацкий станок с зажимными челноками и зажимной челнок | 1989 |
|
SU1777614A3 |
Сущность изобретения: ткацкий станок содержит боевой механизм 1 с торсионным валом 2, нулевое положение которого может регулироваться при помощи регулировочного рычага 11 и сервопривода 15.Между поверхностью скольжения регулировочного рычага 11 и неподвижной направляющей располагается жесткий, например, клинообразный промежуточный корпус 19, который может приводится в движение посредством сервопривода 15. 8 з.п.ф-лы, 6 ил.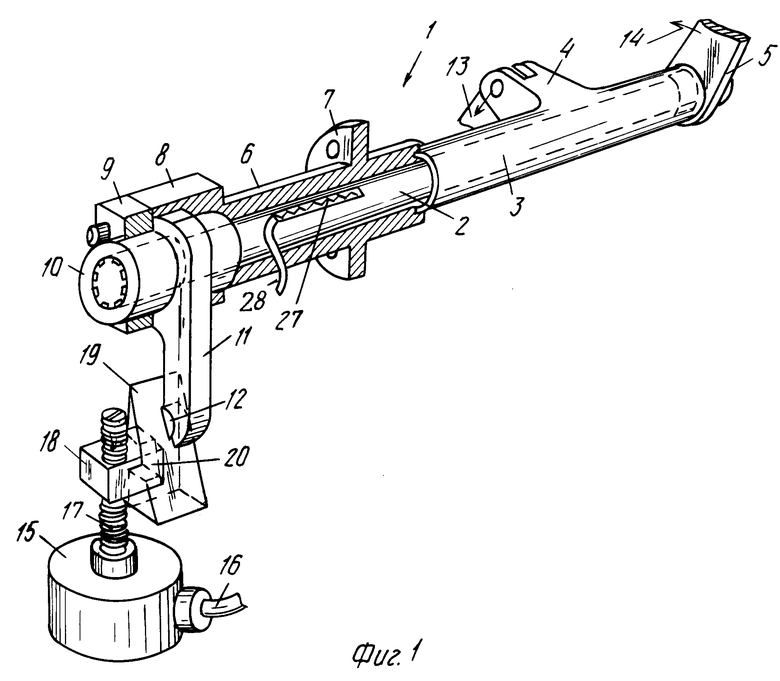
| Лентообмотчик | 1977 |
|
SU641506A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
