Изобретение относится к ракетной технике, а более конкретно к управляемым ракетам, содержащим головку самонаведения, выпущенным по целям, требующим для перехвата интенсивного маневрирования на конечном участке самонаведения.
При перехвате целей, обладающих малой отражающей поверхностью, высокой скоростью полета, высокой маневренностью, способностью приближаться к обороняемому объекту по крутым пикирующим или предельно низким траекториям, головка самонаведения обнаруживает и начинает вырабатывать необходимую для управления ракетой информацию за ограниченное время до точки встречи, например за 1-2 с. Часть временного интервала тратится на подготовку необходимой для управления информации, так что на отработку промаха, накопившегося на предшествующем менее точном участке полета, остается очень короткая по времени конечная фаза участка самонаведения, например 0,5-1 с.
В этих условиях решающее значение для отработки промаха и прямого попадания в цель или сведения промаха к допустимому значению имеет способность ракеты создавать для воздействия на траекторию корректирующее усилие (перегрузку) большого уровня за минимальное время, управлять его ориентацией по фазе и длительностью воздействия.
Известны устройства для управления ракетой, содержащие рулевые поверхности, соединенные линией связи с блоком управления и отклоняемые по сигналам, вырабатываемым в блоке управления.
Известны устройства для управления ракетой, которые содержат газогенератор с газораспределителями, сопла которых вынесены относительно центра масс ракеты для создания управляющего момента, поворот газораспределителей осуществляется приводами по сигналам, поступающим из блока управления, а расход газа через сопла и соответствующие расходу управляющая сила и реактивный управляющий момент пропорциональны углу поворота газораспределителя.
Известны устройства для управления ракетой, которые содержат систему отдельных ракетных двигателей, вынесенных относительно центра масс, сопла которых ориентированы перпендикулярно продольной оси ракеты для создания управляющего момента и быстрого вывода ракеты на угол атаки.
Эти устройства ограничены по возможности эффективно корректировать траекторию запаздыванием в создании аэродинамических сил из-за длительности разворота корпуса ракеты на угол атаки с помощью рулевых поверхностей, а в случае управления поворотом ракеты с помощью реактивной струи - падением аэродинамической перегрузки с увеличением высоты полета и уменьшением скорости ракеты при увеличении дальности стрельбы.
Известны устройства для создания перегрузки, которые содержат ракетные двигатели, расположенные радиально по корпусу ракеты вблизи ее центра масс, при этом каждый отдельный микродвигатель снабжен отдельным воспламенителем, соединенным линией связи с блоком управления. Блок управления вырабатывает сигналы, поступающие на зажигание воспламенителей выбранных для включения двигателей.
Данные устройства позволяют осуществить точное наведение и прямое попадание в цель путем корректирующих воздействий отдельными импульсами (или серией отдельных импульсов). Каждый отдельный импульс создается отдельным ракетным микродвигателем, вырабатывающим за время работы весь свой суммарный импульс силы. Однако величины тяги и импульса силы, создаваемые отдельным микродвигателем, ограничены его массой и габаритами, что позволяет применять эти устройства только для малогабаритных ракет массой около 10-20 кг.
Для наиболее распространенного класса управляемых ракет, имеющих боевую ступень массой от нескольких десятков до нескольких сотен килограмм, создание перед точкой встречи требуемого для точного наведения режима сверхманевренности с перегрузкой 15-30 единиц и быстродействием 0,02-0,03 с, реализуемого с помощью двигателя поперечного управления, имеющего по меньшей мере один общий газогенератор и множество радиально расположенных сопел, закрытых заглушками, часть из которых открывается для создания корректирующего усилия.
Устройство подобного типа, предназначенное для создания корректирующего усилия (именуемое в дальнейшем двигателем поперечного управления), позволяет при одинаковом информационном обеспечении обнулить по крайней мере в два раза больший промах, чем устройство, содержащее отдельные ракетные микродвигатели. Это обеспечивает в свою очередь более высокую точность и эффективность поражения цели на большой высоте и дальности.
Известно устройство для управления снарядом, содержащее кольцевой двигатель поперечного управления с общим газогенератором, имеющим радиальные сопла, закрытые заглушками. Кольцевой двигатель поперечного управления установлен на подшипнике и связан с гироскопом, измеряющим угол крена снаряда для стабилизации кольцевого двигателя при покачиваниях снаряда по крену (заявка Франции N 8023087 F 42 В 15/02, 1980 г).
Недостатками этого устройства являются назначение величины и фазы корректирующего усилия по измеренным до пуска ракеты угловой скорости линии визирования, скорости цели и априорной скорости ракеты, которые не соответствуют реализуемым при подлете к цели из-за разнесения по времени моментов пуска и точки встречи, отсутствие обнуления корректирующего усилия при обнулении промаха, поддержание заданной при пуске фазы корректирующего усилия (угла крена двигателя внешнего корректирования), не соответствующей изменяющейся фазе промаха, и отсутствие возможности коррекции фазы корректирующего усилия.
Наиболее близким к изобретению является "Устройство для управления ракетой" по заявке PCT/RU93/00055 (WO 94/00731) кл. F 42 В 15/01, содержащее головку самонаведения, соединенную линией связи с блоком управления, маршевый двигатель, двигатель поперечного управления с общим газогенератором и радиальными соплами, закрытыми заглушками, расположенными в радиальных плоскостях, перпендикулярных продольной оси снаряда, при этом каждому соплу газогенератора соответствует противоположное симметрично расположенное реверсивное сопло, аэродинамические рули-элероны, установленные в носовой части ракеты, аэродинамические поверхности, установленные в хвостовой части ракеты.
В указанном устройстве для ликвидации рассогласования по фазе промаха рули-элероны связаны с блоком управления, а угол отклонения рулей-элеронов соответствует управляющему моменту, требуемому для разворота ракеты по крену для ликвидации рассогласования по фазе промаха.
Недостатком данного устройства является то, что при наличии к моменту включения корректирующего усилия неизбежных начальных рассогласований по фазе между вектором промаха и направлением корректирующего усилия, вызванных ошибками измерений и ограниченностью интервала наблюдений цели головкой самонаведения, после включения корректирующего усилия происходит изменение фазы отрабатываемого промаха с возрастающей скоростью. Разворот ракеты по крену не успевает компенсировать изменение фазы, что приводит к появлению нескомпенсированного промаха в плоскости, перпендикулярной вектору корректирующего усилия (ортогональной составляющей промаха), ухудшению точности наведения и снижению эффективности поражения цели.
Целью настоящего изобретения является увеличение точности наведения ракеты путем компенсации рассогласования по фазе, возникающего после включения корректирующего усилия.
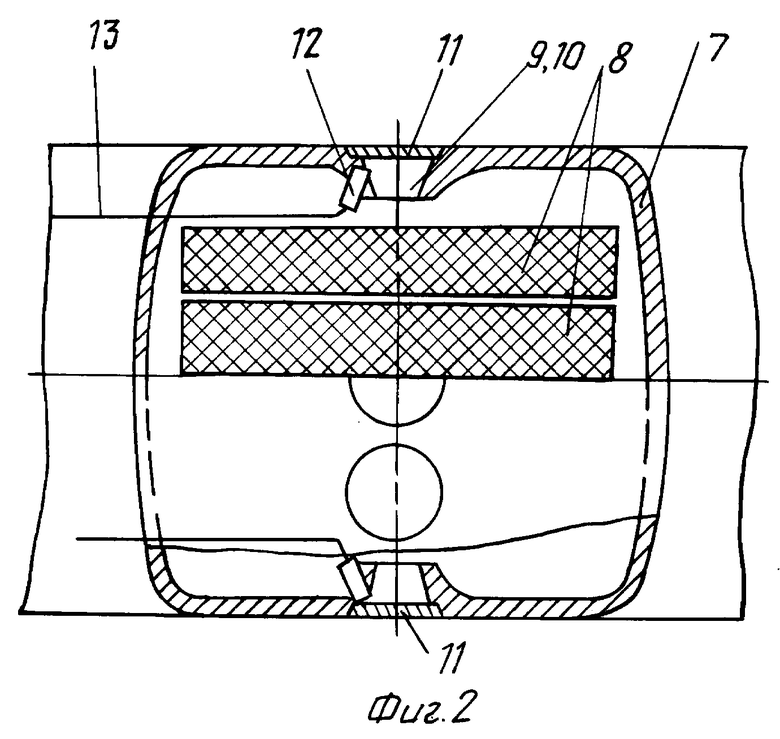
Для достижения цели высокоманевренная ракета 1 (фиг. 1) согласно изобретению содержит головку самонаведения 2, рулевые приводы 3, отклоняющие рули-элероны 4, блок управления 5, боевую часть 6, двигатель поперечного управления 7, создающий корректирующее усилие для воздействия на траекторию, маршевый двигатель 14, аэродинамические поверхности (крылья) 15.
Двигатель поперечного управления 7 представляет собой (фиг. 2) генератор газа с общей камерой, пороховыми зарядами 8, радиальными соплами 9, 10, расположенными по периметру ракеты вблизи ее центра масс, закрытыми заглушками 11, к каждой заглушке подведен индивидуальный пиропатрон 12, соединенный электрической линией 13 с блоком управления 5. Результат достигается тем, что вблизи центра масс установлен двигатель поперечного управления 7 с общим газогенератором и радиально расположенными соплами 9, 10, аэродинамические рули-элероны 4 установлены в носовой части ракеты впереди истекающей струи двигателя поперечного управления вне зоны ее действия, а аэродинамические поверхности 15 установлены в хвостовой части ракеты и крепятся к внешнему кольцу подшипника 16, а внутреннее кольцо подшипника 17 закреплено на газоводе маршевого двигателя 14. Тем самым обеспечивается свободное вращение крыльевого блока, состоящего из плоскостей крыльев 15, скрепленных с внешним кольцом подшипника 16 относительно продольной оси ракеты, и исключается действие момента по крену, возникающего вследствие распространения области пониженного давления за истекающей реактивной струей двигателя поперечного управления на попадающую в эту область консоль крыла. Исключение воздействия на ракету дестабилизирующих моментов по крену, на порядок превосходящих создаваемые рулями управляющие моменты по крену, предотвращает неуправляемое произвольное вращение ракеты по крену и обеспечивает стабилизацию угла крена ракеты с помощью передних рулей-элеронов, что в свою очередь создает возможность управления ориентацией фазы вектора корректирующего усилия для совмещения его с изменяющейся фазой вектора промаха.
В первом частном случае конкретного выполнения результат достигается тем, что радиальный угол между соседними соплами двигателя поперечного управления, умноженный на целое число, составляет 90o, что обеспечивает каждому соплу наличие ортогонального сопла, а устройство выполнено с возможностью измерения угловой скорости линии визирования головкой самонаведения, определения блоком управления фазы корректирующего усилия и сопел, предназначенных для вскрытия, соответствующих фазе корректирующего усилия, подачи сигналов из блока управления на пиропатроны заглушек сопел, предназначенных для вскрытия, измерения блоком управления, после включения корректирующего усилия, рассогласования по фазе между вектором промаха и вектором корректирующего усилия и включения дополнительного корректирующего усилия в ортогональном первоначальному корректирующему воздействию направлении путем подачи из блока управления сигналов на пиропатроны заглушек, выбранных блоком управления ортогональных сопел, при превышении модулем рассогласования установленной величины (порога) порядка 20-45o. Устройство выполнено с возможностью прекращения корректирующего воздействия при обнулении суммарного промаха или при его снижении ниже установленного уровня, или при превышении модулем рассогласования по фазе установленного порога, например 90o, путем подачи от блока управления сигналов на пиропатроны заглушек сопел, противоположных вскрытым (реверсивных). При этом за счет скрепления аэродинамических поверхностей с внешним кольцом подшипника и закрепления внутреннего кольца подшипника на газоводе маршевого двигателя исключено воздействие на ракету дестабилизирующих моментов по крену, создаваемых на аэродинамических поверхностях областью пониженного давления за истекающей реактивной струей двигателя поперечного управления.
Во втором частном случае конкретного выполнения результат достигается установкой двигателя поперечного управления, выполненного в виде отдельного отсека ракеты, на подшипниках, допускающих его поворот относительно продольной оси ракеты. Отсек соединен кронштейном с приводом, а привод выполнен с возможностью совмещения фазы вектора корректирующего усилия с изменяющейся фазой промаха путем непрерывного разворота двигателя поперечного управления относительно его продольной оси по сигналам, поступающим из блока управления ракетой.
Изобретением предусмотрены два возможных варианта первого частного случая конкретного выполнения устройства управления ракетой.
По первому варианту первого частного случая конкретного выполнения изобретения устройство управления ракетой содержит головку самонаведения, блок управления, аэродинамические рули с рулевыми приводами, двигатель поперечного управления в виде единого газогенератора с радиально расположенными вблизи центра масс соплами, закрытыми заглушками, отличающееся тем, что радиальный угол между соседними соплами, умноженный на целое число, составляет 90o (например 7,5o или 15o). Благодаря этому гарантируется в момент второго включения вскрытие сопла, создающего корректирующее усилие, ортогональное к первоначальному.
Первый вариант первого частного случая конкретного выполнения изобретения иллюстрируется рисунками, приведенными на фиг. 3-6.
На фиг. 3 представлено изменение по времени ортогональной составляющей промаха в случае однократного включения двигателя поперечного управления (кривая 1) и при первом варианте первого частного случая реализации способа управления, предлагаемого в изобретении (кривая 2).
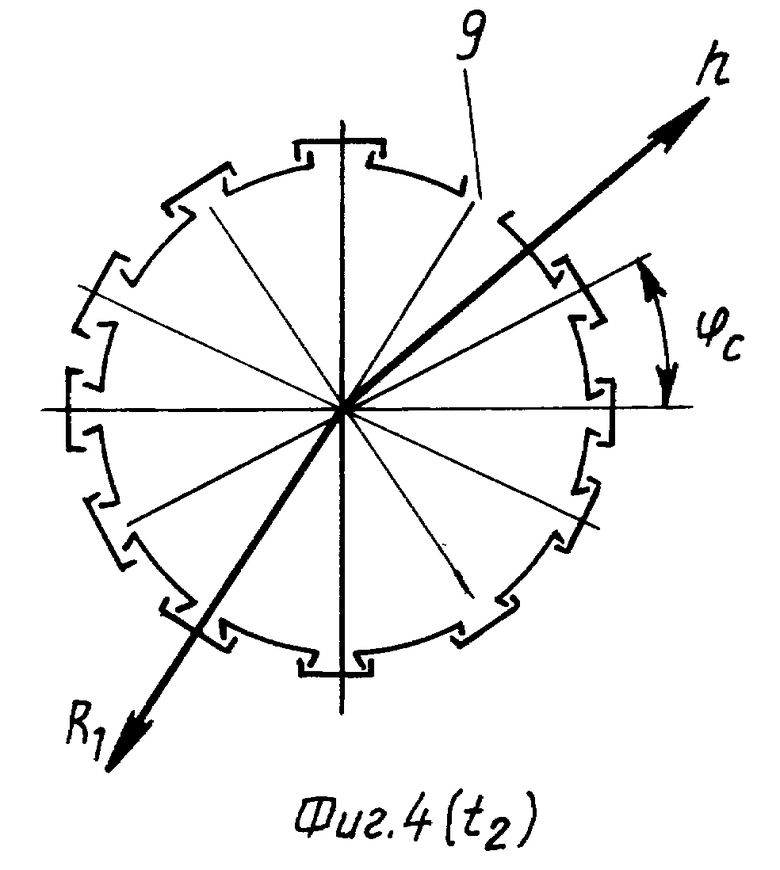
На фиг. 4 представлено радиальное сечение ракеты с вскрытым в момент t2 соплом 9, показано направление вектора промаха h, направление вектора корректирующего усилия при первом включении R1 и радиальный угол между соседними соплами ϕc.
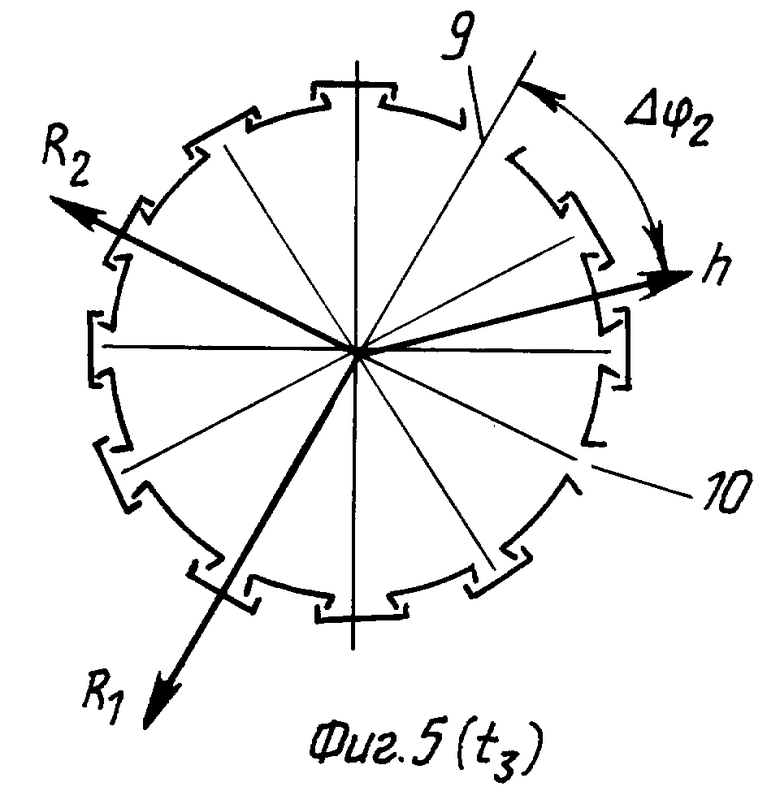
На фиг. 5 представлено радиальное сечение ракеты с вскрытым в момент t3 ортогональным соплом 10, показано для этого момента времени направление вектора промаха h, направления вектора корректирующего усилия R1 от сопла 9, вектора корректирующего усилия R2 от ортогонального сопла 10 и рассогласование по фазе Δϕ2 между направлением вектора корректирующего усилия при первом включении и направлении вектора промаха в момент t3.
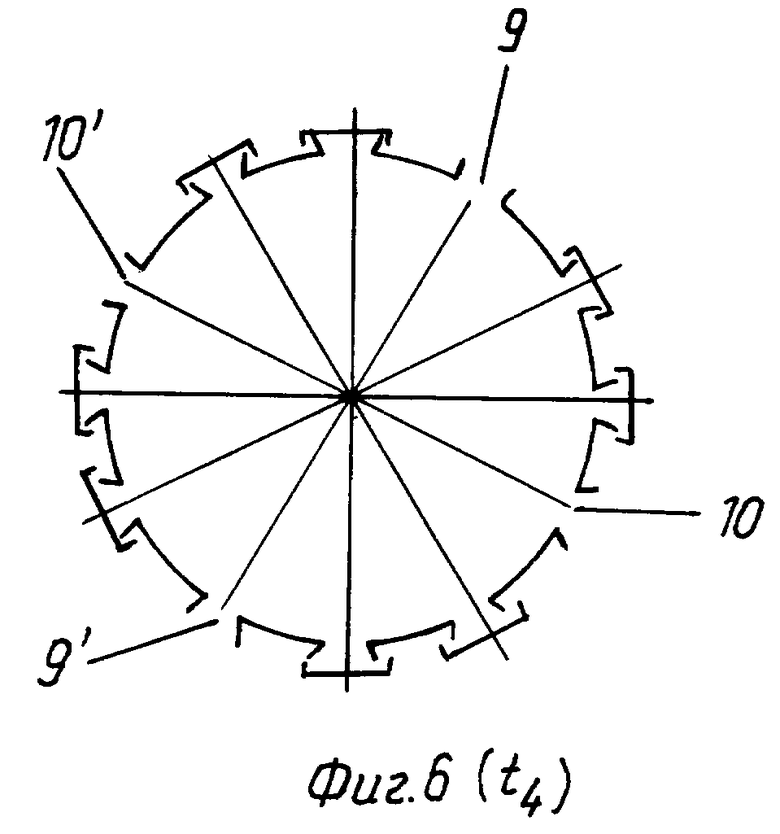
На фиг. 6 представлено радиальное сечение ракеты в момент обнуления корректирующего усилия с вскрытыми реверсивными соплами 9' и 10'.
При сближении ракеты с целью на дистанцию обнаружения цели головкой самонаведения происходит захват цели головкой самонаведения. На начальном участке самонаведения, по длительности составляющем обычно около половины общей длительности самонаведения (например 0,5-1 с при общей длительности соответственно 1-2 с), недостаточно точные измерения угловой скорости линии визирования не позволяют определить величину и направление промаха. При сближении с целью точность измерений увеличивается и за время 0,5-1 с до встречи в блоке управления ракетой 5 с достаточной точностью определяются оценки величины и фазы промаха. В момент достижения величиной промаха заданного порогового уровня t2 производится зажигание двигателя поперечного управления.
Двигатель поперечного управления представляет собой по меньшей мере один газогенератор твердого топлива с радиально расположенными соплами, закрытыми заглушками. В момент t2 вскрывается сопло (или несколько сопел) 9, создающее корректирующее усилие R1 в направлении, ближайшем к направлению промаха (фиг. 4). В действительности оценка фазы промаха отличается от истинной фазы за счет ошибок измерения угловой скорости линии визирования головкой самонаведения и ограниченности интервала измерений. Из-за этих причин и дискретности расположения сопел возникает угловое рассогласование между направлением вектора промаха h и направлением вектора корректирующего усилия R1, которое приводит к появлению составляющей промаха в направлении, перпендикулярном промаху в момент первого включения (ортогональной составляющей).
При сближении с целью под воздействием корректирующего усилия происходит уменьшение первоначальной составляющей промаха и увеличение ортогональной составляющей (см. фиг. 3), что вызывает резкое возрастание фазового рассогласования между вектором корректирующего усилия R1 и вектором промаха h. В прототипе при однократном включении корректирующего усилия увеличение ортогональной составляющей промаха не компенсируется, что приводит к пролету ракеты мимо цели.
Преимущество данного устройства состоит в том, что радиальный угол между соседними соплами, умноженный на целое число, составляет 90o, что обеспечивает выбор и вскрытие ортогонального сопла (сопел) 10 в момент второго включения t3, когда рассогласование по фазе между текущим направлением промаха и направлением в момент первого включения превысит установленный порог Δϕ2 (см. фиг. 5), и создании ортогональной составляющей корректирующего усилия R2, направленной на уменьшение ортогональной составляющей промаха (см. фиг. 3, кривая 2) и увеличение точности наведения.
Под воздействием двух составляющих корректирующего усилия R1 и R2 происходит обнуление промаха или его уменьшение до значения, ниже установленного порога. В момент t4 (см. фиг. 6), когда выполнится одно из следующих условий: уменьшение промаха ниже заданного порога, что равнозначно уменьшению модуля угловой скорости ниже заданного порога, или превышение фазового рассогласования между вектором промаха и суммарным вектором корректирующего усилия заданного порога, производят вскрытие реверсивных сопел 9' и 10', в тот же момент исчезает корректирующее усилие, нормальное к продольной оси ракеты, и прекращается его воздействие на траекторию. Последний участок полета ракеты (t4, t5, фиг. 3) представляет полет ракеты с обнуленным корректирующим усилием по траектории, обеспечивающей в большинстве случаев попадание ракеты непосредственно в цель или с минимально допустимым промахом в пределах радиуса действия боевой части 6.
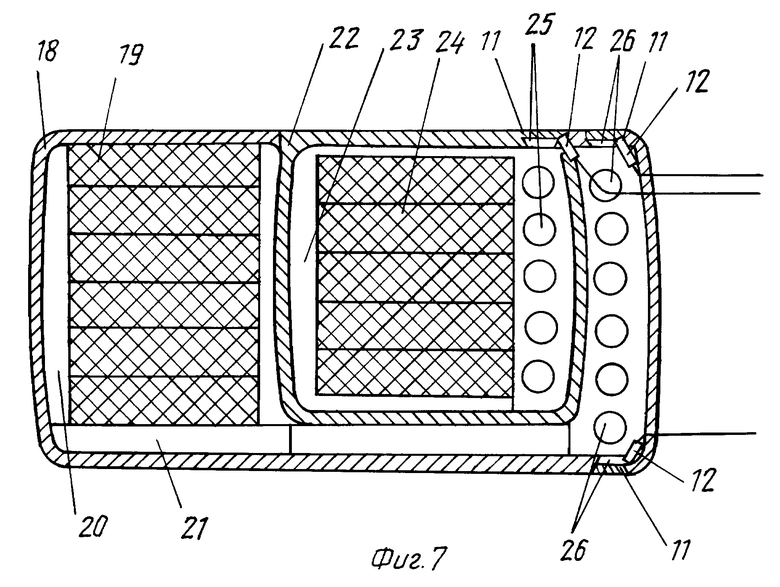
На фиг. 7 представлен двигатель поперечного управления, соответствующий второму варианту первого частного случая конкретного выполнения изобретения. В состав двигателя поперечного управления в таком варианте входят первый газогенератор с корпусом 18, пороховыми зарядами 19, камерой сгорания 20, газоводом 21 и радиальными соплами 26 и второй газогенератор с корпусом 22, камерой сгорания 23, пороховыми зарядами 24 и радиальными соплами 25. Угол между соседними радиальными соплами каждого газогенератора выбран по тому же правилу, что и в первом варианте первого частного случая конкретного выполнения изобретения, исходя из которого его величина, умноженная на целое число, составляет 90o. Применение газовода для первого газогенератора обеспечивает размещение радиальных сопел первого газогенератора рядом с соплами второго газогенератора вблизи центра масс ракеты, что снижает величину опрокидывающего момента, действующего на ракету при включении корректирующего усилия. По второму варианту первого частного случая принцип создания корректирующих усилий аналогичен вышерассмотренному. Различия заключаются в том, что автономность газогенераторов исключает падение давления в камере сгорания и снижение корректирующего усилия при втором включении, что имеет место при одной камере сгорания в первом варианте первого частного случая. Дополнительным преимуществом в этом варианте является возможность варьировать время второго включения от совмещения моментов включения двух газогенераторов, что позволяет увеличить в два раза величину корректирующего усилия или обеспечить его равенство усилию в первом варианте при близости массогабаритных параметров конструкции, до создания паузы между включениями исходя из анализа текущего значения величины и фазы промаха и оставшегося времени полета до точки встречи для компенсации маневра цели и обеспечения минимального промаха и наибольшей вероятности поражения цели.
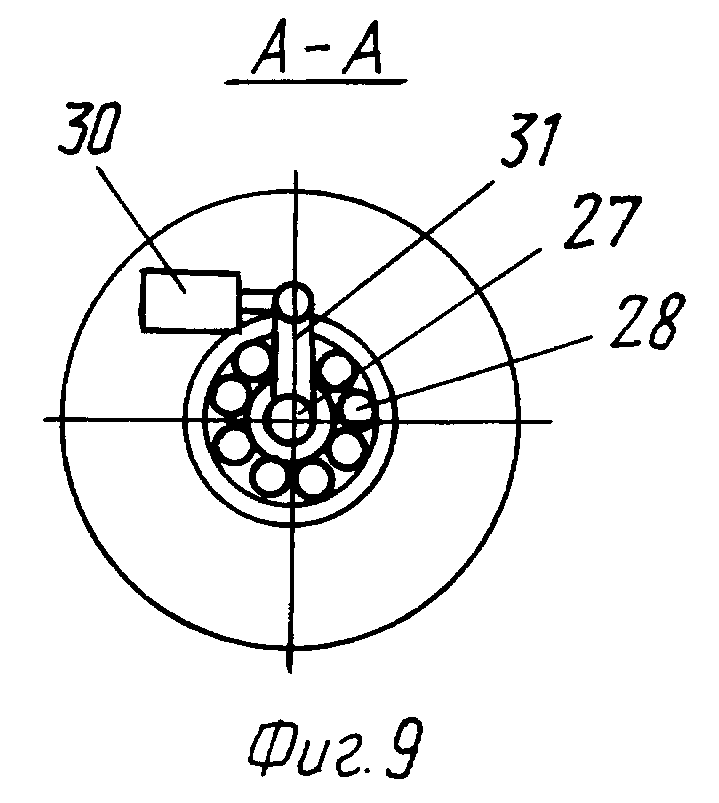
По второму частному случаю выполнения устройство управления, реализующее непрерывное совмещение фазы вектора корректирующего усилия с изменяющейся фазой вектора промаха, включает (фиг. 8, 9) двигатель поперечного управления 7 с радиальными соплами 9, продольная ось которого 27 совпадает с продольной осью ракеты и установлена в подшипниках 28, а ракета 1 включает головку самонаведения 2, расположенные в носовой части рули 4 с рулевыми приводами 3, боевую часть 6, блок управления 5, соединенный линией связи 29 с приводом 30, который с помощью кронштейна 31 соединяется с осью двигателя поперечного управления и поворачивает его в подшипниках относительно продольной оси ракеты, маршевый двигатель 14, неотклоняющиеся аэродинамические поверхности 15, укрепленные на наружном кольце 16 подшипника, внутреннее кольцо которого 17 крепится к газоводу двигателя 14.
Двигатель поперечного управления по второму частному случаю исполнения выполнен с возможностью начала разворота до вскрытия сопел и включения корректирующего усилия, по мере определения фазы промаха, но в отличие от устройства управления в аналоге, выполненного с возможностью поддержания с помощью гироскопа постоянной фазы корректирующего усилия, установленной при пуске снаряда, и непозволяющего слежения за непрерывно изменяющейся фазой промаха и ликвидацию непрерывно возрастающего рассогласования между фазой вектора промаха и фазой вектора корректирующего усилия, в данном конкретном выполнении устройство выполнено с возможностью непрерывного разворота двигателя поперечного управления 7, совмещения оси вскрытого сопла (сопел) 9 с направлением промаха и вскрытия реверсивных сопел 9' при обнулении промаха или уменьшении его меньше допустимой величины или вследствие резкого возрастания фазы промаха в непосредственной близости от точки встречи при превышении модулем рассогласования между фазой промаха и фазой корректирующего усилия установленного порога (например 90o).
Резюмируя изложенное, следует отметить, что изобретение в наилучшем примере своего воплощения позволяет обеспечить перехват скоростных, энергично маневрирующих высотных и низколетящих целей в типовых для таких целей условиях крайне ограниченного интервала появления точной информации непосредственно за 1-2 с до точки встречи путем реализации ракетой режима сверхманевренности с помощью реактивного двигателя поперечного управления, создающего значительное корректирующее усилие, регулируемое по фазе и времени действия. В результате обеспечивается прямое попадание или уменьшение на порядок величины промаха.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА СТАРТА И ОРИЕНТАЦИИ РАКЕТЫ | 1995 |
|
RU2082946C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА 9М96 | 2020 |
|
RU2767645C1 |
| РАКЕТА | 2014 |
|
RU2548957C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| Газодинамическое устройство управления малых габаритов | 2020 |
|
RU2753034C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 1998 |
|
RU2146798C1 |
| РАКЕТА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1996 |
|
RU2096734C1 |


Изобретение относится к ракетной технике, а более конкретно - к управляемым ракетам, выпущенным по целям, требующим для перехвата на участке точной пеленгации головкой самонаведения интенсивного маневрирования непосредственно перед точкой встречи. Технический результат - увеличение точности наведения. Данное изобретение заключается в следующем. Измеряют угловую скорость линии визирования на участке пеленгации цели головкой самонаведения для назначения корректирующего усилия, воздействуют корректирующим усилием перпендикулярно продольной оси снаряда при подлете к цели. В процессе воздействия измеряют рассогласование по фазе между вектором промаха и вектором корректирующего усилия и создают дополнительное корректирующее усилие для уменьшения ортогональной составляющей промаха. В частном случае конкретного выполнения технический результат достигается непрерывным разворотом относительно продольной оси ракеты вектора корректирующего усилия в процессе его действия для совмещения с вектором промаха. 2 з.п.ф-лы, 9 ил.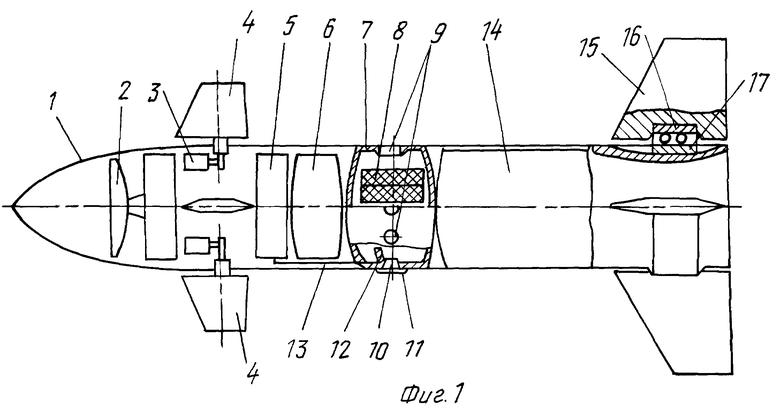
| Экономайзер | 0 |
|
SU94A1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| US 4291849 А, 29.09.81 | |||
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ | 2004 |
|
RU2251834C1 |

