Изобретение относится к способам селекции пассивных космических объектов и может быть использовано для обнаружения фрагментов и частиц разрушившихся космических аппаратов (КА) и последних ступеней ракет-носителей, находящихся в космосе.
К настоящему времени на околоземных орбитах находится несколько миллионов различного размера частиц-осколков космического "мусора", представляющих серьезную опасность для КА и, в частности, для обитаемых космических станиций (КС). Защита от движущихся с высокой скоростью частиц (осколков) предполагает прежде всего их обнаружение и последующую селекцию осколков, представляющих опасность при столкновении с КС.
Известны способы обнаружения космических осколков или других приближающихся к КС объектов, основанные на измерении их скорости и дальности с помощью бортовых радиолокаторов или ИК-датчиков [1]
Недостатком этих способов является то обстоятельство, что определение траектории движения и селекция осколков, представляющих опасность, требуют значительных материальных затрат и вычислительных ресурсов.
Наиболее близким аналогом изобретения служит способ селекции космических объектов, основанный на пеленговании и измерении параметров движения объектов на борту КС [2]
Недостатки способа-прототипа обусловлены тем, что сближение КС с осколками космического "мусора" в большинстве случаев происходит с высокими относительными скоростями, следовательно, определение параметров и прогноз траектории должны осуществляться достаточно быстро. Известный способ пеленгации и прогнозирования движения объектов не может обеспечить требуемого быстродействия при селекции осколков, опасных для КС. Кроме того, данный способ предполагает использование нескольких, не менее двух, пеленгаторов, связанных с бортовым вычислителем, что усложняет систему обнаружения и селекции осколков и, следовательно, снижает надежность известного способа.
Техническим результатом изобретения является разработка способа измерения параметров взаимного движения и обработки полученной информации, обеспечивающих селекцию опасных при сближении осколков (космических объектов) с повышенной надежностью, с минимальными затратами времени, при минимальном портебном для этого объеме бортовых средств.
Указанный технический результат достигается тем, что в способе в процессе пеленгования объекта, находящегося на орбите, высота которой во время пеленгования совпадает с текущим значением высоты орбиты космической станции, измеряют радиальную скорость движения объекта относительно космической станции, селектируют объект, как представляющий опасность столкновения для космической станции, либо по факту равенства нулю пеленга на объект, либо в случае неравенства указанного нулю по условию
W - δ ≅ Vr ≅ W + δ, (1)
где Vr измеренное значение относительной скорости объекта;
δ априорно известная величина погрешности измерения параметров движения космической станции и объекта;
W критическое значение относительной радиальной скорости объекта, определяемое в соответствии с выражением
где p измеренное значение пеленга на объект;
Vh априорно известное значение орбитальной скорости объекта, однозначно определяемое высотой орбиты объекта;
Vгс априорно известное значение горизонтальной составляющей орбитальной скорости космической станции.
Сущность предлагаемого способа поясняется чертежами, где на фиг. 1, 2, 3 представлены схемы движения космических объектов (осколков) и КС; на фиг. 4 схематично изображена система, обеспечивающая реализацию предлагаемого способа.
На фиг. 1, 2 обозначены векторы скоростей движения КС  и осколков B, D, K:
и осколков B, D, K:  соответственно, а также показаны линии визирования и траектории движения КС и осколков (прерывистые линии). Кроме того, на фиг. 1 обозначены векторы
соответственно, а также показаны линии визирования и траектории движения КС и осколков (прерывистые линии). Кроме того, на фиг. 1 обозначены векторы  радиальные составляющие скоростей КС и осколка В соответственно.
радиальные составляющие скоростей КС и осколка В соответственно.
На фиг. 3 обозначены вектор  скорости осколка, а также вектор
скорости осколка, а также вектор  горизонтальной составляющей скорости КС и вектор
горизонтальной составляющей скорости КС и вектор  относительной радиальной скорости осколка.
относительной радиальной скорости осколка.
Помимо этого, на фиг. 1 и 3 обозначен пеленг П на космический объект (осколок).
На фиг. 4 изображены КС 1, размещенный на ней пеленгатор 2 с антенной 3, установленной с возможностью вращения в горизонтальной плоскости, содержащий вычислитель модуль 4 управления, связанный с пеленгатором 2. На фиг. 4 показано также сечение 5 диаграммы направленности антенны 3, представляющее собой вытянутый вдоль вертикали эллипс. В качестве пеленгатора 2 может быть, например, использован доплеровский радиолокатор, работающий в квазинепрерывном режиме. Антенна 3 должна иметь узкую (менее 1 градуса) диаграмму направленности.
Характерной особенностью, которую необходимо отметить при анализе движения частиц космического "мусора", является то, что подавляющее большинство частиц (осколков) движется по орбитам, близким к круговым. Как известно, скорость объекта, движущегося по круговой орбите, постоянна и однозначно определяется высотой орбиты. Следовательно, значение скорости названных осколков определяется орбитальной высотой, на которой в данное время находятся КС и осколки (космические объекты), и является априорно известной величиной. Кроме того, вектор скорости частицы лежит в плоскости, касательной к орбите, т.е. в плоскости местного горизонта. Предполагается, что расстояние, на котором осуществляется пелегация осколков, не превышает нескольких десятков километров. Это существенно меньше радиуса орбиты КС, в связи с чем кривизна орбиты практически не влияет на геометрию изображенных на фиг. 1, 2, 3 траекторий движения космических тел.
Рассмотрим случай, когда КС движется по круговой орбите, имеющей одинаковую высоту с высотой орбит осколков, и, следовательно, Vc=Vhb=Vhd=Vhk. Как нетрудно видеть из сравнения схем на фиг. 1 и фиг. 2, столкновение произойдет, если КС и осколок В пройдут равные отрезки пути до точки встречи O1, что возможно только при определенной ориентации векторов скоростей и при определенном значении пеленга П, т.е. при соблюдении условия
Vrc+ Vrb = (Vc+ Vhb)•cosπ. (3)
Обозначим
Vr≡ Vrc+ Vrb;
W ≡ (Vc+ Vhb)•cosπ = 2Vhbcosπ. (4)
В этом случае условие, при котором возможно столкновение, можно записать в виде
Vr W. (5)
Если значения параметров взаимного движения КС и осколка не удовлетворяют условию (5), столкновение не состоится. Так, осколки D и K (см. фиг. 2) пересекают траекторию движения КС в точках O2 и O3 раньше или позже момента нахождения в указанных точках КС.
В выражения (3), (4), (5) не входит дистанция между КС и осколками, следовательно, предлагаемый способ обеспечивает селекцию осколков, опасных из-за возможного столкновения, вне зависимости от дальности обнаружения последних, т. е. для реализации способа не требуется измерения дальности до объекта, что позволяет существенно упростить бортовую аппаратуру КС.
Далее рассмотрим случай, когда вектор скорости КС не лежит в плоскости местного горизонта, т.е. когда КС движется по эллиптической орбите. Необходимо отметить, что в процессе эксплуатации КС параметры ее орбиты, в том числе высота и орбитальная скорость, регулярно измеряются (как правило, наземными средствами), уточняется эксцентриситет орбиты, вычисляются составляющие скорости, данные передаются на борт и хранятся в памяти бортовой системы управления КС. Выражение для вычисления относительной радиальной скорости осколков, представляющих опасность, в случае эллиптической орбиты можно получить на основе решения треугольника BCO, представленного на фиг. 3, что дает вышеприведенную формулу (2) для W.
Легко видеть, что выражение (4) является частным случаем формулы (2), если принять Vrc Vh.
Формула (2) теряет смысл при П=0, что соответствует ситуации, когда объект (осколок) движется встречно по орбите, совпадающей с орбитой движения КС. В этом случае объект, представляющий опасность, достаточно легко селектировать по нулевому значению пеленга.
Поскольку при измерении вышеназванных параметров, определяющих взаимное движение КС и осколков, неизбежны погрешности, условие, на основе которого принимают решение, в отличие от равенства (5) приобретает вид (1).
Работа системы, реализующей предлагаемый способ, заключается в следующем.
За счет вращения антенны 3 (см. фиг. 4) осуществляется сканирование окружающего КС пространства. При этом в просматриваемую пеленгатором 2 область попадают только космические объекты (осколки), движущиеся по орбитам на высотах, равных высоте орбиты КС 1, т.е. объекты, с которыми возможны столкновения. Информация о пеленге и относительной радиальной скорости объектов с выхода пеленгатора 2 подается на модуль 4 управления, где с помощью вычислителя осуществляется расчет значения радиальной скорости по формуле (4) или (2) и проверяется соблюдение условия (1). При получении положительного результата формируется команда, предупреждающая об опасности столкновения КС 1 с данным космическим объектом (осколком).
Возможность обнаружения и селекции космического объекта по данным одного измерения всего двух параметров, осуществляемого с помощью единого устройства (доплеровского радиолокатора), позволяет повысить оперативность обнаружения и надежность селекции осколков космического "мусора", представляющих опасность для КС.
Реализация предложенного способа не представляет каких-либо принципиальных затруднений при современном уровне развития радиолокационной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1996 |
|
RU2124462C1 |
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2018 |
|
RU2701671C1 |
| Способ регистрации приближения активного объекта к космическому аппарату орбитального резерва в области низких околоземных орбит | 2017 |
|
RU2658203C1 |
| Способ инспекции космических аппаратов в области низких околоземных круговых орбит | 2019 |
|
RU2720758C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| Способ импульсной лазерной очистки космического пространства от одиночных мелких объектов космического мусора и импульсная лазерная система для его реализации | 2020 |
|
RU2761957C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
Использование: селекция пассивных космических объектов, обнаружение с борта космической станции (КС) фрагментов частиц, движущихся по траекториям опасного сближения. Сущность изобретения: способ включает в себя пеленгацию космических объектов, находящихся вблизи (в зоне действия пеленгатора) КС, с измерением двух параметров текущего взаимного положения КС и объекта-пеленга и относительной радиальной скорости и идентификацию на базе этих данных космического объекта как представляющего опасность столкновения с КС. Реализация изобретения не требует разработки принципиально новых радиотехнических устройств, а надежность селекции гарантируется минимальным составом приборного оборудования и уменьшенным объемом вычислений. 4 ил.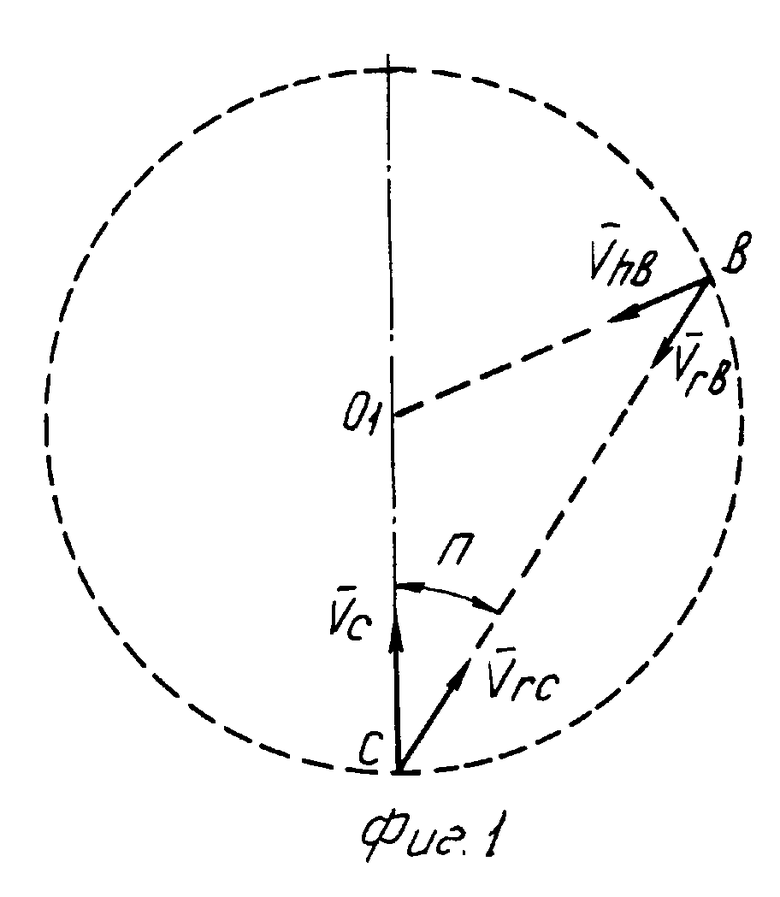
Способ селекции космических объектов, преимущественно искусственного происхождения, основанный на пеленговании и измерении параметров движения объектов на борту космической станции, отличающийся тем, что в процессе пеленговании объекта, находящегося на орбите, высота которой во время пеленгования совпадает с текущим значением высоты орбиты космической станции, измеряют радиальную скорость движения объекта относительно космической станции, селектируют объект как представляющий опасность столкновения для космической станции, либо по факту равенства нулю пеленга на объект, либо, в случае неравенства указанного пеленга нулю, по условию
W - δ ≅ Vг ≅ W + δ,
где Vг измеренное значение относительной скорости объекта;
δ - априорно известная величина погрешности измерения параметров движения космической станции и объекта;
W критическое значение относительной радиальной скорости объекта, определяемое в соответствии с выражением
W Vh • sin [П + arcsin (Vгс sin П/Vh)] / sin П;
П измеренное значение пеленга на объект;
Vh априорно известное значение орбитальной скорости объекта, однозначно определяемое высотой орбиты объекта;
Vгс априорно известное значение горизонтальной составляющей орбитальной скорости космической станции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| К проблеме загрязнения космического пространства | |||
| Экспресс-информация | |||
| Сер | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| "Ракетн | |||
| и космич | |||
| техн." - ЦНТИ "Поиск", 1991, N 7, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бакитько Р.В | |||
| и др | |||
| Радиосистемы межпланетных космических аппаратов./Под ред | |||
| А.С.Виницкого | |||
| - М.: Радио и связь, 1993, с | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
