Изобретение относится к космической технике, и может быть использовано для управления ракетой при удалении с орбиты спутников, у которых закончился срок активного существования.
Для удаления спутника с орбиты, как правило, разрушают его корпус путем столкновения с ним ракеты, предполагая, что осколки спутника после его разрушения, получив импульс при столкновении с ракетой, изменят орбиту и начнут входить в плотные слои атмосферы.
Известен способ наведения ракеты на цель, движущуюся в атмосфере, [1]. Используемая ракета, помимо ракетного двигателя, обычно содержит систему наведения, исполнительным устройством которой являются аэродинамические рули. При наведении ракеты на цель с помощью рулей изменяют угловое положение ракеты. В результате возникают составляющие аэродинамической силы и тяги двигателя, действующие в боковом направлении, обеспечивающие изменение траектории полета ракеты. Подобный способ применяют для наведения зенитной ракеты, используемой против воздушных целей. Для космоса данный способ малопригоден. По причине отсутствия атмосферы, аэродинамическое управление зенитной ракетой невозможно.
При наведении ракеты на цель часто применяется координатор цели, в качестве которого используют головку самонаведения (ГСН), позволяющую реализовать пропорциональное наведение [2]. При данном способе наведения необходимо измерять угловую скорость линии визирования цели, что осуществляют, применяя шарнирно установленную, стабилизируемую ГСН. Описанный способ, используемый при наведении ракеты для перехвата подвижного объекта, не предполагает точного наведения на объект. Поэтому данный способ не применяют для поражения космической объекта, когда требуется его разрушение путем столкновения с ним.
При наличии координатор цели могут использовать смешанный способ управления ракетой [3], включающий теленаведение и самонаведение ракеты. Возмущения, действующие во время полета на ракету и объект приводят к ошибкам в наведении ракеты, зависящим от изменения прогнозируемого положения ракеты относительно объекта, плотности и температуры окружающей среды. Существенную ошибку в наведении ракеты для рассматриваемого случае вносит некомпланарность орбит объекта и выводимой ракеты. Указанные недостатки данного способа не позволяют реализовать наведения ракеты на объект с заданной точностью.
Наиболее близким к заявляемому способу, принятому в качестве прототипа, является способ наведения ракеты, используемый для удаления с орбиты спутника [4]. Ракета снабжена двигателями, сопла которых расположенными в середине корпуса, для управления движением ракеты влево, вправо, вверх, вниз. Пропорциональное наведение ракеты осуществляют с помощью инфракрасной ГСН. Конструкция и способ применения описанной ракеты предполагают использование жестко закрепленной на корпусе ракеты ГСН. Наведение ракеты производят путем перемещения ее в боковом направлении за счет работы названных выше двигателей.
Недостаток описанного способа заключается в том, что при минимальных, близких к нулевому, значениях угла пересечения траекторий движения спутника и ракеты при наведении, измерение угловой скорости линии визирования объекта с достаточной для успешного наведения ракеты точностью становится невозможным. Указанный недостаток способа вызывает серьезные затруднения при наведении ракеты на объект для обеспечения прямого попадания в него.
Задачей изобретения является повышение точности наведения ракеты на космический объект (искусственный спутник) независимо от значений угла, под которым пересекаются траектории спутника и ракеты при наведении.
Поставленная задача решается тем, что в способе наведения ракеты на космический объект, осуществляемом путем управления движением ракеты по сигналам, получаемым посредством визирования объекта и измерения параметров движения ракеты, в процессе наведения ракеты формируют сигнал управления движением ракеты по значению угла, образованного линией визирования объекта и касательной к прогнозируемой траектории движения объекта, выполняют маневр в плоскости наведения, уменьшая до минимальной величины значение выше названного угла, изменяют траекторию движения ракеты, приближают ее к траектории движения объекта, при этом для выполнения маневра формируют сигнал на основе информации, получаемой как посредством визирования объекта, так и путем измерения скорости движения ракеты, линейного перемещения, а также текущего значения дальности до объекта.
Техническим результатом изобретения является повышение вероятности удаления спутника с орбиты путем столкновения с ним.
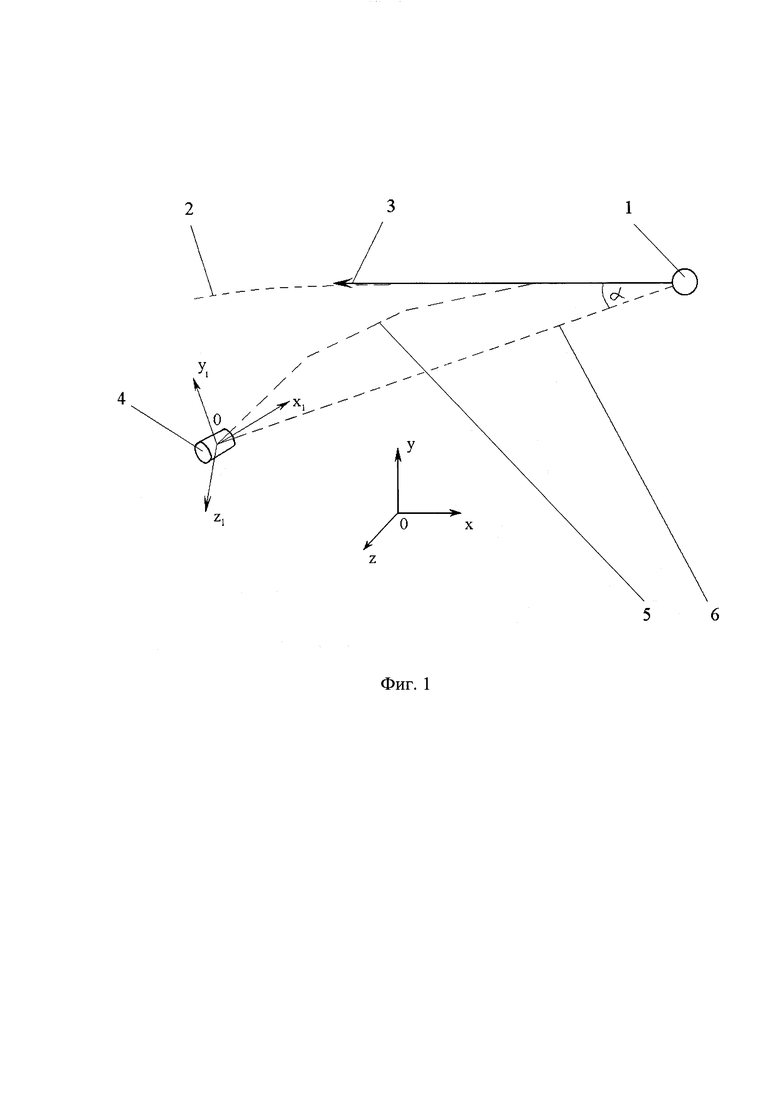
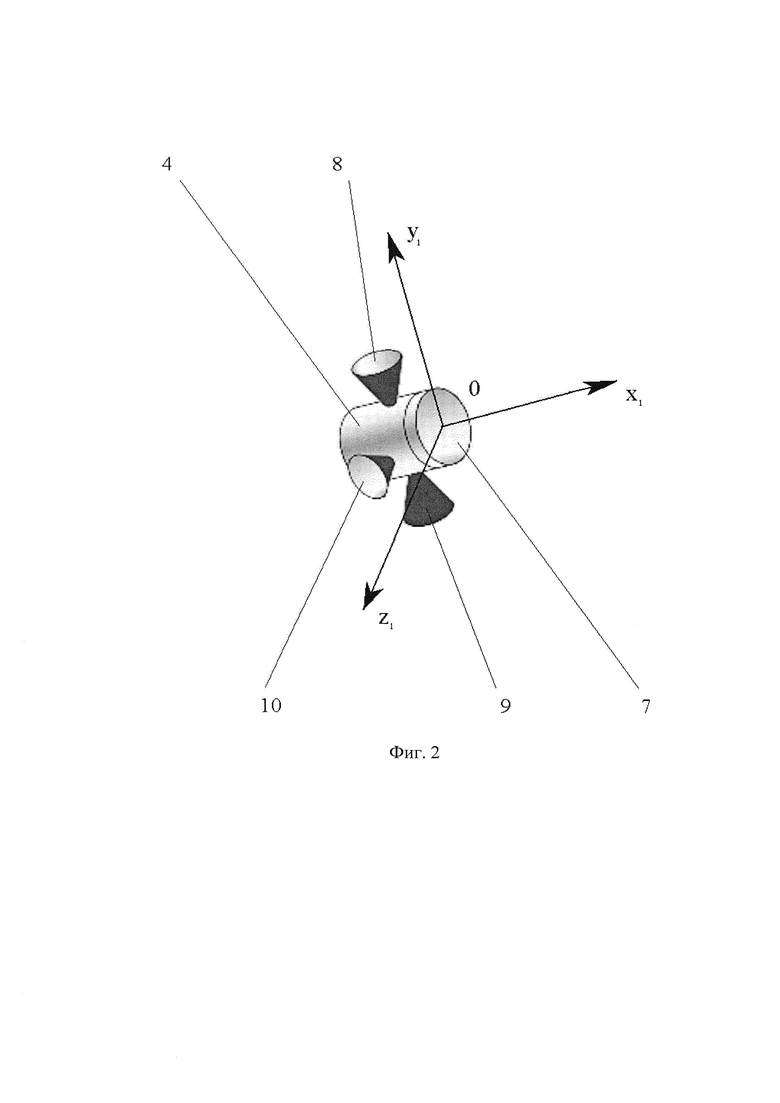
Для пояснения предлагаемого способа к описанию способа прилагаются 2 рисунка, на которых на фиг. 1 показана схема сближения ракеты и спутника, на фиг. 2 представлена ракета.
На фиг. 1 показаны спутник 1, траектория 2 его движения, касательная 3 к прогнозируемой траектории движения спутника 1, ракета 4, траектория 5 движения ракеты 4, линия визирования 6 спутника, угол α - угол между линией визирования 6 спутника и касательной 3 к траектории движения спутника. Кроме того, на рисунке показаны инерциальная система координат Oxyz, которая используется как опорная, и система координат Ox1y1z1, связанная с ракетой 4. Ось Ox1 системы координат Ox1y1z1 направлена по продольной оси ракеты 4.
Ракета 4 согласно рисунку, представленному на фиг 2, содержит жестко закрепленные на корпусе ракеты пеленгатор 7, двигатели 8, 9, 10 системы управления движением центра масс ракеты. Двигатель, расположенный симметрично двигателю 10 с другой стороны ракеты, на рисунке не виден. Векторы тяги названных двигателей расположены в плоскости, ортогональной продольной оси Ox1 ракеты 4. Помимо этого, ракета 4 содержит необходимую для управления аппаратом, находящимся в космосе, систему угловой стабилизации, построенную на основе реактивных сопел, аналогичную рассмотренной в [5]. Реактивные сопла данной системы также расположены на корпусе ракеты (на рисунке не показаны). В качестве измерительного прибора системы угловой стабилизации ракеты целесообразно использовать бесплатформенную инерциальную навигационную систему (БИНС), включающую гироскопы и акселерометры, соединенные с процессором. Первые, как известно, служат для измерения угловых скоростей и углов отклонения ракеты 4, вторые для измерения линейных параметров движения ракеты. С помощью БИНС реализуется упомянутая выше инерциальная система координат Oxyz.
Наведение ракеты на спутник осуществляют следующим образом.
В заданное время, которое определяют по параметрам орбиты спутника 1, ракету 4 выводят в точку пространства, из которой возможно осуществить наведение ракеты 4 на спутник 1.
Перед началом сближения со спутником 1 в систему управления ракеты 4 вводят угловые координаты спутника 1, а также данные, задающие положение касательной 3 к траектории движения спутник 1 в опорной системе координат Oxyz, и дальность до спутника. Ввиду сравнительно короткого участка, на котором осуществляется наведение ракеты 4, по сравнения со всей траекторией движения спутника 1, при определении положения касательной 3 можно пренебречь кривизной траектории движения спутника 1 на участке наведение ракеты 4 и принять в качестве упомянутой касательной соответствующий отрезок траектории движения спутника 1.
В процессе обнаружения спутника 1 с помощью пеленгатора 7 осуществляют его идентификацию. При визировании спутника 1 вычисляют угол α - угол между касательной 3 к траектории движения спутника и линией визирования 6. В частном случае данный угол определяют как сумму угла пеленгации цели 1 в системе координат Ox1y1z1, связанной с ракетой 4, и угла поворота названной системы координат относительно опорной системы координат Oxyz. В общем случае вычисление выполняют с привлечением сферической геометрии. По значению угла α определяют положение плоскости наведения. Затем в зависимости от дальности ракеты 4 до прогнозируемой траектории 2, которое определяют по вычисленному углу α и расстоянию до спутника 1, формируют сигнал для управления соответствующими двигателями 8, 9 или 10 системы управления движением центра масс ракеты 4, с помощью которых перемещают ракету в направлении к траектории 2 спутника. Текущее значение дальности до спутника 1 определяют как разницу исходного значения дальности до спутника 1 и расстояния, пройденного ракетой 4 после начала наведения, которое находят посредством счисления пути по информации, получаемой от БИНС.
Для гашения колебаний при боковом перемещении ракеты 4, осуществляемом с помощью названных двигателей, используют сигналы инерциальной навигационной системы, снимаемые с БИНС.
Используя систему угловой стабилизации ракеты 4, периодически осуществляют поворот ракеты, ракету поворачивают на небольшой угол для того, чтобы изображение спутника 1 в процессе наведения переместить в центр поля зрения пеленгатора 7. Основным признаком для выполнения поворотов ракеты 4 является движение изображения спутника 1 к краю поля зрения пеленгатора 7. Очевидно, повороты ракеты 4 следует осуществлять после очередного окончания работы двигателей 8, 9, 10 системы управления движением центра масс ракеты и успокоения колебаний. Благодаря этому, а также ввиду более высокого быстродействия системы угловой стабилизации по сравнению с быстродействием системы управления движением центра масс ракеты 4, управление угловым положением ракеты практически не будет сказываться на работе контура управления движением центра масс.
Основываясь на измерении угла визирования спутника 1, а также на вычислении угла α между касательной к траектории движения спутника 1 и линией визирования спутника, поочередно выполняют угловые и линейные перемещения ракеты 4, описанные выше, смещают траекторию движения ракеты 4 в плоскости наведения, приближая ее к траектории движения спутника 1. Уменьшают до минимальной величины значение вышеупомянутого угла α. Переводят ракету 4 на траекторию встречного движения со спутником 1 для их взаимного столкновения. При соударении спутника с ракетой спутник разрушается. Осколки спутника при встречном соударении с ракетой получают тормозящий импульс, что способствует потере скорости и их вхождению вместе с осколками ракеты в плотные слои атмосферы.
В отличие от известного способа при использовании предлагаемого способа отпадает необходимость в измерении угловой скорости линии визирования спутника. Благодаря этому, становится возможным наведение ракеты как при сравнительно больших, так и при минимальных, близких к нулевому значению, углах встречного движения ракеты и спутника, с достаточной для успешного наведения ракеты точностью. Повышение точности наведения ракеты и расширение диапазона значений угла, под которым пересекаются траектории спутника и ракеты при наведении, повышает вероятность удаления спутника с орбиты.
Предварительные расчеты и моделирование на компьютере показали, что для реализации способа не требуются приборы повышенной точности.
Источники информации, использованные при составлении заявки
1. Неупокоев Ф.К. Стрельба зенитными ракетами. 2-е изд., - М.: Воениздат, 1980. - С. 50-55.
2. Дымова А.И., Альбац М.Е., Бонч-Бруевич А. М. Радиотехнические системы / Под ред. А.И. Дымовой. - М.: Сов. радио, 1975. - С. 335-353.
3. Волжин А.И., Сизов Ю.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983. - С. 8-9.
4. Противоспутниковая ракета ASM-135A ASAT www.airwar.ru/weapon/avv/asm 135.html (прототип).
5. Каргу Л.И. Системы угловой стабилизации космических аппаратов. - М.: Машиностроение, 1973. - С. 13-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 1995 |
|
RU2090469C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1996 |
|
RU2124462C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ ОЧИСТКИ ОРБИТЫ МНОГОМОДУЛЬНЫМ КОСМИЧЕСКИМ КОМПЛЕКСОМ | 2020 |
|
RU2753393C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| Способ стрельбы телеориентируемыми в луче лазера ракетами с вертолета | 2024 |
|
RU2841348C1 |
Изобретение относится к космической технике и может быть использовано для управления ракетой при удалении с орбиты спутников, у которых закончился срок активного существования, путем разрушения спутника с помощью ракеты и изменения его орбиты. Сущность изобретения заключается в том, что в способе наведения ракеты на спутник, осуществляемом путем управления движением ракеты по сигналам, получаемым посредством визирования спутника и измерения параметров движения ракеты, в процессе наведения ракеты формируют сигнал управления движением ракеты по значению угла, образованного линией визирования спутника и касательной к прогнозируемой траектории движения спутника, выполняют маневр в плоскости наведения, уменьшая до минимальной величины значение выше названного угла, изменяют траекторию движения ракеты, приближают ее к траектории движения спутника, при этом для выполнения маневра формируют сигнал на основе информации, получаемой как посредством визирования цели, так и путем измерения скорости движения ракеты, величины перемещения, а также текущего значения дальности до спутника. Достигаемым техническим результатом изобретения является улучшение точности наведения ракеты и повышение вероятности удаления спутника с орбиты. 1 з.п. ф-лы, 2 ил.
1. Способ наведения ракеты на спутник, осуществляемый путем управления движением ракеты по сигналам, получаемым посредством визирования спутника и измерения параметров движения ракеты, отличающийся тем, что в процессе наведения ракеты используют инерциальную систему координат как опорную и систему координат, связанную с ракетой и направленную по ее продольной оси, формируют с помощью жестко закрепленного на ракете пеленгатора по значению угла, образованного линией визирования спутника и касательной к прогнозируемой траектории движения спутника, сигнал для управления жестко закрепленными на ракете двигателями системы управления движением центра масс ракеты, векторы тяги которых располагают в плоскости, ортогональной продольной оси ракеты, и используют для перемещения ракеты в направлении к траектории движения спутника, при этом упомянутый сигнал управления названными двигателями формируют по углу и расстоянию до спутника, выполняют маневр в плоскости наведения, уменьшают до минимальной величины значение вышеназванного угла, изменяют траекторию движения ракеты, приближают ее к траектории движения спутника.
2. Способ по п.1, отличающийся тем, что при выполнении маневра формируют сигнал управления движением ракеты на основе информации, получаемой посредством визирования спутника, вычисления дальности до цели, измерения скорости движения и линейного перемещения ракеты.
| Противоспутниковая ракета ASM ASAT [он-лайн], дата выкладки на сайт 07.04.2003 в соответствии с сайтом https://archive.org [найдено 13.05.2019] найдено из интернет http://www.airwar.ru/weapon/avv/asm135.html | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ ЯДЕРНОНЕСУЩИХ СПУТНИКОВ САМОЛЕТОВ, ГОЛОВОК МЕЖКОНТИНЕНТАЛЬНЫХ РАКЕТ И ДРУГИХ ИСКУССТВЕННЫХ И ЕСТЕСТВЕННЫХ НЕБЕСНЫХ ТЕЛ - "ЩИТ" | 1995 |
|
RU2087840C1 |
| РАКЕТА И СПОСОБ ЕЁ РАБОТЫ | 2014 |
|
RU2590760C2 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2166464C2 |
| US 4568040 A1, 04.02.1986. | |||

