Изобретение относится к области преобразования радио или акустических сигналов при их обработке в процессе приема и может быть использовано в информационных каналах с доплеровским сдвигом частоты, обусловленным относительным перемещением объектов, например, при осуществлении связи между подвижными объектами или в локации.
В радиотехнике широко известен способ обработки сигналов, основанный на преобразовании колебаний путем гетеродинирования [1]. При названом преобразовании каждое значение частоты сигнала изменяется на одну и ту же величину. В результате получают сигнал с суммарной или разностной частотами. Очевидно, такое преобразование можно рассматривать как аддитивное.
Известен также способ преобразования сигналов, осуществляемый путем мультипликативного смещения частоты несущих колебаний [2]. При этом в зависимости от значения коэффициента транспонирования (коэффициента мультипликативного переноса), который может быть меньше или больше единицы, может осуществляться как сжатие, так и расширение частотного спектра сигнала. Применение указанного способа ограничено ввиду отсутствия отработанных алгоритмов мультипликативного преобразования частоты сигналов.
Прототипом предлагаемого изобретения выбран способ обработки сигнала, основанный на преобразовании отраженного от объекта сигнала путем сжатия частотного спектра и фильтрации, при проведении локации космических объектов [3]. Данный способ предполагается использовать для обработки зондирующих сигналов при локации малоразмерных быстроперемещающихся и имеющих вращение объектов, например осколков космического мусора. Осуществляя обработку сигнала путем сжатия частотного спектра, в десятки раз уменьшают его полосу, что позволяет реализовать доплеровский принцип локации при значительной девиации частоты принимаемого сигнала, обусловленной прежде всего вращением объекта относительно собственной оси.
При локации космических аппаратов во время осуществления навигации, например для выполнения маневра сближения на орбите, скорость относительного движения объектов, как правило, хорошо известна, в частности, благодаря внешнетраекторным измерениям. Однако высокая скорость движения объектов может привести к значительному доплеровскому сдвигу частоты, что затрудняет или делает даже невозможным применение в процессе локации наиболее эффективного оптимального метода обработки зондирующего сигнала, если его частотный спектр не является узкополосным, как, например, у последовательности неэквидистантных радиоимпульсов с малой длительностью. Упомянутый выше способ не обеспечивает обработки описанных сигналов и, как следствие этого, отсутствует возможность измерения дальности до объектов. Что является его недостатком.
В процессе преобразования сигнала упомянутым способом снимается фазовая модуляция (манипуляция) сигнала, тем самым исключается его использование для обработки сигналов в канале связи. Что также можно считать недостатком данного способа.
Задачей, на которую направлено изобретение, является повышение эффективности радиотехнических информационных каналов за счет применения широкополосных сигналов, благодаря осуществлению компенсации доплеровского сдвига частоты.
Указанная задача решается за счет того, что в способе обработки сигнала, основанном на преобразовании сигнала с последующей оптимальной фильтрацией, осуществляют преобразование сигнала путем транспонирования (мультипликативного переноса) частотного спектра, компенсируют доплеровский сдвиг частоты сигнала, в частности, выполняют расширение частотного спектра сигнала для компенсации отрицательного доплеровского сдвига частоты и выполняют сжатие частотного спектра сигнала для компенсации положительного доплеровского сдвига частоты.
При этом транспонирование частотного спектра осуществляют путем изменения в процессе обработки сигнала временного смещения значений сигнала, которое задают, определяя его по следующей формуле:

где ΔТр - упомянутое временное смещение значений сигнала, соответствующее текущему времени Тр процесса обработки частотного спектра сигнала; kT - коэффициент транспонирования частотного спектра сигнала, который вычисляют, учитывая знак доплеровского сдвига частоты принимаемого сигнала, в соответствии с выражением

где νr - радиальная скорость относительного перемещения объектов; с - скорость распространения сигнала; k - коэффициент, которому задают значение, равное двум при вычислении коэффициента kT для обработки локационного сигнала и равное единице при вычислении упомянутого коэффициента для обработки сигнала в канале связи, при этом коэффициент k берут с положительным знаком при вычислении коэффициента kT для обработки сигнала с отрицательным доплеровским сдвигом частоты и берут коэффициент k с отрицательным знаком при вычислении коэффициента kT для обработки сигнала с положительным доплеровским сдвигом частоты.
При выполнении обработки дискретизированного во времени сигнала транспонирование частотного спектра осуществляют путем повторного считывания или пропуска значения сигнала через интервал iT0, где Т0 - период дискретизации сигнала; i - количество точек дискретизации в упомянутом интервале, которое определяют как ближайшее целое от числа j, вычисляемого по формуле
j=1/|kT-1|,
при этом повторное чтение значения сигнала производят, если значение коэффициента транспонирования частотного спектра сигнала kT<1, и пропуск значения сигнала производят, если значение коэффициента транспонирования частотного спектра сигнала kT>1. Оптимальную фильтрацию сигнала производят посредством его сжатия.
Сущность изобретения поясняется на примере работы локатора, принципиальная схема которого представлена на чертеже.
Схема локатора содержит управляющее устройство (УУ) 1, к которому подключены передатчик 2, соединенный с передающей антенной 3, запоминающее устройство 4 излучаемого сигнала (ЗУИ), а также запоминающее устройство 5 принимаемого сигнала (ЗУП), которое связано с приемником 6, соединенным с приемной антенной 7; устройство 8 корреляционной обработки сигнала, соединенное с УУ 1, с ЗУИ 4 и с ЗУП 5, ЗУИ 4 и ЗУП 5 предполагается строить на основе цифровой техники. Их связь с передатчиком 2 и с приемником 6 должна осуществляться с помощью согласующих блоков, содержащих смесители, гетеродины для преобразования частоты сигнала, а также аналого-цифровые преобразователи. Последние из названных устройств на чертеже не показаны.
Обработку сигнала в процессе радиолокации осуществляют следующим образом.
С помощью передатчика 2 и передающей антенны 3 по команде УУ 1 излучают зондирующий сигнал в виде нерегулярной последовательности импульсов. Одновременно излучаемый сигнал записывается в ЗУИ 4. Предварительно осуществляют преобразование частоты сигнала, обычно гетеродинированием колебаний, и его дискретизацию. Отраженный от объекта сигнал принимают с помощью антенны 7, после чего в приемнике 6 преобразуют частоту сигнала, дискретизируют и по команде УУ 1 записывают в ЗУП 5. Далее по команде УУ 1 осуществляют считывание сигналов из ЗУИ 4, ЗУП 5 и оптимальную фильтрацию принятого сигнала посредством устройства 8 корреляционной обработки сигнала, как это описано, например, в [4]. При локации движущегося объекта с целью компенсации доплеровского смещения частоты осуществляют транспонирование частотного спектра принимаемого сигнала путем изменения в процессе обработки временного смещения значений сигнала в соответствии с выражением (1). Для чего определяют kT - коэффициент транспонирования частотного спектра сигнала, который вычисляют, используя формулу (2). При обработке сигнала в системах локации задают значение коэффициента k=2. Учитывают знак доплеровского сдвига частоты принимаемого сигнала, определяют значение коэффициента kT как сумму слагаемых, если доплеровский сдвиг частоты отрицательный (когда объект удаляется), или как разность, если доплеровский сдвиг частоты положительный (когда объект приближается). При обработке дискретизированного сигнала знак доплеровского сдвига частоты учитывают, осуществляя по команде УУ 1 повторное считывание из ЗУП 5 или пропуск очередного значения сигнала для компенсации положительного или отрицательного доплеровского сдвига частоты принимаемого сигнала соответственно. При наличии в зоне радиолокационного обзора объекта в процессе оптимальной фильтрации в результате сжатия сигнала получают на выходе устройства 8 импульс. Что позволяет, кроме угловых координат, по положению импульса на временной оси определять дальность до объекта.
При отсутствии компенсации доплеровского сдвига частоты график автокорреляционной функции будет иметь несколько максимумов с меньшей амплитудой. Что затрудняет обнаружение полезного сигнала на фоне помехи и не обеспечивает однозначности измерения дальности до объекта.
Аналогичным образом производят компенсацию доплеровского сдвига частоты принимаемого сигнала при осуществлении связи с подвижным объектом. Предварительно определяют коэффициент транспонирования kT частотного спектра сигнала, который вычисляют в соответствии с выражением (2), учитывая знак доплеровского сдвига частоты принимаемого сигнала, как это было показано выше. Задают значение коэффициента k=1.
Благодаря компенсации доплеровского сдвига становится возможным применение широкополосного сигнала при организации связи с подвижным объектом, что обеспечивает увеличение пропускной способности канала связи в десятки раз. Компенсация доплеровского сдвига широкополосного сигнала при локации подвижных объектов обеспечивает возможность определения, помимо угловых координат, дальности до объекта.
Источники информации
1. Сифоров В.И. Радиоприемные устройства. - М.: Воениздат, 1954, - с.237-240.
2. Измерения в электронике: Справ. / В.А.Кузнецов и др., Под ред. Кузнецова В.А. М.: Энергоатомиздат, 1987. С.449.
3. Патент RU 2175139, МПК 7 G 01 S 13/00, В 64 G 9/00, 20.10.2001 (прототип).
4. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975, - с.38-54.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2473923C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА | 2005 |
|
RU2326401C2 |
| СПОСОБ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ | 2004 |
|
RU2298771C2 |
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ ПАССИВНОЙ ЛОКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2564995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И СЕЛЕКЦИИ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2552537C2 |
| СПОСОБ ВИДЕНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ ЛАЗЕРНОЙ ПОДСВЕТКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2207591C1 |
Изобретение относится к области преобразования радио или акустических сигналов при их обработке в процессе приема и может быть использовано в информационных каналах с доплеровским сдвигом частоты, обусловленным относительным перемещением объектов, например, при осуществлении связи между подвижными объектами или в локации. Технический результат состоит в многократном увеличении пропускной способности канала связи. Компенсация доплеровского сдвига широкополосного сигнала при локации подвижных объектов обеспечивает возможность определения, помимо угловых координат, дальности до объекта. Для этого в способе обработки сигнала, основанном на преобразовании сигнала с последующей оптимальной фильтрацией, осуществляют преобразование сигнала путем транспонирования частотного спектра, компенсируют доплеровский сдвиг частоты сигнала, в частности, выполняют расширение частотного спектра сигнала для компенсации отрицательного доплеровского сдвига частоты и выполняют сжатие частотного спектра сигнала для компенсации положительного доплеровского сдвига частоты. Транспонирование частотного спектра осуществляют путем изменения в процессе обработки сигнала временного смещения значений сигнала. 1 з.п. ф-лы, 1 ил.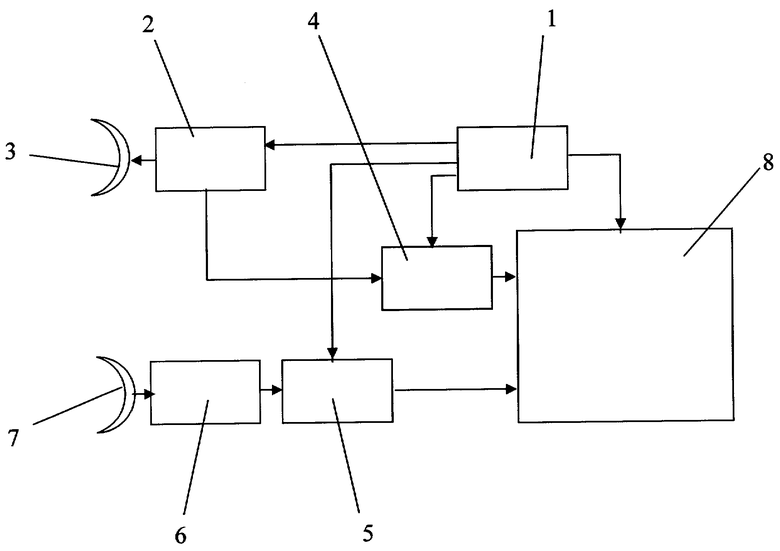
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ СЕЛЕКЦИИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 1995 |
|
RU2090469C1 |
| US 5341144 A, 23.08.1994 | |||
| US 5343203 A1, 30.08.1994. | |||

