Изобретение относится к радарным установкам для автоматического сопровождения цели и наводки орудия, снабженного сервомоторами; такие установки содержат антенну Кассегрена, снабженную параболическим рефлектором и плоским зеркалом, причем параболический рефлектор имеет поляризационно-зависимое отражающее средство и плоское зеркало с приспособлением для поворота плоскости поляризации, рупорный облучатель антенны Кассегрена занимает центральное положение в апертуре плоского зеркала для передачи и приема радиоизлучения радара через антенну Кассегрена. К последней подключены радарное передающее и радарное приемное устройства. Кроме того, установка имеет ЭВМ и серворегулятор.
Радарные установки такого типа известны, например, из книги М.И. Школьника "Введение в радарные системы", второе издание, с. 242-243. В этих известных радарных установках движение слежения или сопровождения цели достигается перемещением плоского зеркала, например, с помощью сервомоторов. Такая система допускает только ограниченный угол раскрыва в известных радарных установках. Для обеспечения больших углов раскрыва установка должна быть дополнена сервомоторами для вращения антенны Кассегрена в целом. При этом однако возрастает стоимость радарной установки и делается излишним регулирование плоского зеркала.
Радарная установка, являющаяся предметом данного изобретения, лишена этих недостатков и характеризуется тем, что антенна Кассегрена установлена на той части ствола орудия, которая почти не подвержена отдаче, а ее радарное приемное устройство, радарная ЭВМ, серворегулятор приспособлены для управления сервомоторами таким образом, чтобы орудие с установленной на нем антенной Кассегрена автоматически сопровождало цель на первом режиме работы. При этом возможность управления плоским зеркалом может быть с успехом использована для мгновенного получения угла упреждения с использованием простых средств управления.
Предпочтительное выполнение радарной установки в соответствии с данным изобретением характеризуется тем, что плоское зеркало снабжено исполнительным устройством, управляемым ЭВМ для выработки на втором режиме работы угла смещения между осевой линией орудия и линией прицела антенны Кассегрена.
Один из возможных недостатков, связанных с установкой антенны Кассегрена на стволе орудия состоит в том, что возникающие при стрельбе очередями вибрации могут передаваться антенне. Это может привести к возникновению крутильных колебаний антенны Кассегрена вокруг центра тяжести и как следствие к существенному снижению точности определения положения цели. Этот недостаток может быть устранен, например, путем изменения угловой погрешности положения цели с помощью монопульсного радарного приемного устройства или радарного приемного устройства с конической разверткой.
Другое предпочтительное выполнение радарной установки в соответствии с изобретением характеризуется тем, что антенна Кассегрена снабжена датчиками поворота для измерения крутильной вибрации, индуцируемой стрельбой орудия, причем ЭВМ приспособлена для выработки сигналов управления на основе информации, получаемой от датчиков поворота; указанные сигналы регулируют исполнительные устройства таким образом, что линия прицела антенны Кассегрена становится по крайней мере существенно независимой от упомянутых крутильных вибраций.
Кроме того, вызывая вращение антенны Кассегрена, вибрации могут привести к радиоизлучению в направлении линии прицела, а это в свою очередь приводит к тому, что стационарные объекты приобретают кажущуюся допплеровскую скорость и возникновению кажущегося изменения допплеровской скорости цели. Оба упомянутых явления могут привести к резкому ухудшению характеристик радарных установок допплеровского типа, а именно такого рода установки всегда используются в рассматриваемой здесь области применения. Особенно сильно упомянутые негативные явления проявляются в диапазоне относительно коротких волн, т. е. в установках такого типа, которые здесь описаны, так как только коротковолновые параболические рефлекторы настолько малогабаритны, что их можно устанавливать непосредственно на орудиях.
Другое предпочтительное выполнение данного изобретения характеризуется тем, что антенна Кассегрена снабжена трансляционным датчиком для обнаружения индуцированных стрельбой орудия трансляционных вибраций в направлении линии прицела, причем ЭВМ приспособлена на основе информации трансляционных датчиков вырабатывать командные сигналы для исполнительных устройств, обеспечивающих по крайней мере существенную компенсацию помех приема и передачи радара, вызываемых вышеупомянутой трансляционной вибрацией.
На фиг. 1 показаны орудие и антенна Кассегрена в единой конструкции; на фиг. 2 один из возможных вариантов антенны Кассегрена в соответствии с данным изобретением; на фиг. 3 представлена схема первого варианта радарной установки, действующей совместно с орудием; на фиг. 4 показана схема второго варианта радарной установки, действующей совместно с орудием с компенсацией вибраций, вызываемых орудием.
На фиг. 1 показано, как антенна Кассегрена 1 и орудие 2 могут быть выполнены в единой конструкции. Орудие имеет ствол 3, который испытывает значительный откат после выстрела, и направляющую 4 ствола 3, которая имеет лишь незначительный откат после выстрела. Кроме того, орудие снабжено сервомотором 5, который осуществляет азимутальный поворот ствола 3, и сервомотором 6, осуществляющим поворот ствола 3 по углу возвышения. Антенная Кассегрена 1 установлена на направляющей 4 ствола 3. Расположение антенны 1 в непосредственной близости ствола 3 сводит к минимуму параллактическую угловую погрешность между осью ствола 3 и прицельной линией антенны Кассегрена 1, а также обеспечивает эффективное следование антенны Кассегрена 1 за всеми движениями ствола 3.
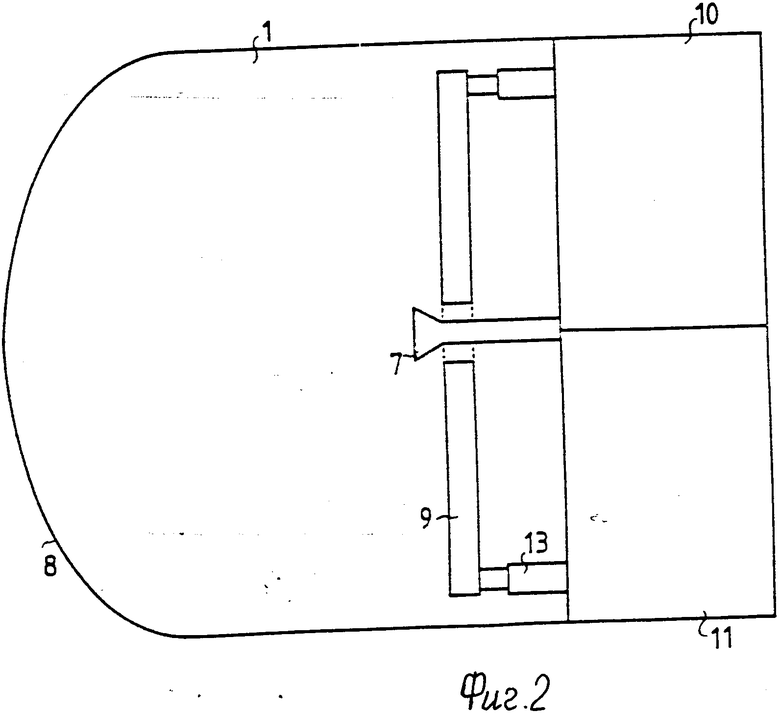
На фиг. 2 антенная Кассегрена 1 показана в сечении. Рупорный облучатель 7 монопульсного типа или с конической разверткой передает радарное излучение с определенным направлением поляризации на параболический рефлектор 8. Параболический рефлектор 8 снабжен поляризационно-зависимым отражающим средством. Последнее состоит, например, из металлических проволочек, расположенных таким образом, чтобы отражать поляризованное радарное излучение. Если радарное излучение поляризовано горизонтально, то почти полное отражение достигается при горизонтальном расположении проволочек. Отраженное радарное излучение падает на плоское зеркало 9, которое снабжено отражающим средством, обеспечивающим поворот плоскости поляризации. Таким средством может быть набор металлических проволочек, расположенных под углом 45o по отношению к направлению поляризации в комбинации с отражающим зеркалом, установленным на расстоянии четверти длины волны радарного излучения. Как общеизвестно из радарной техники, такое устройство отражает поляризованное излучение, поворачивая на 90o направление поляризации по отношению к первоначальному. В результате радарное радиоизлучение после вторичного падения на параболический рефлектор 8 покидает антенну Кассегрена 1.
Радарное излучение, отраженное целью аналогичным образом, попадает на излучатель 7 в соответствии с принципом взаимности для электромагнитного излучения.
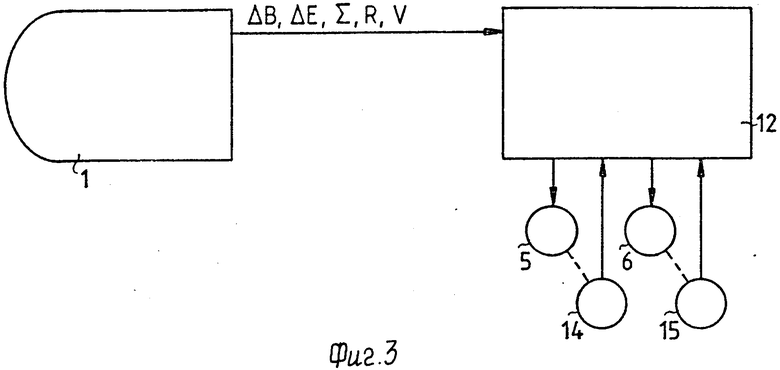
Радарная установка снабжена радарным передающим устройством 10, соединенным с монопульсным рупорным облучателем, а также радарным приемным устройством 11, причем оба указанных устройства могут быть интегрированы с антенной Кассегрена 1. Если антенна Кассегрена 1 направлена на цель, радарное приемное устройство 11 выдает обычные для моноимпульсных радаров или радаров с конической разверткой напряжение погрешности возвышения ΔB, напряжение азимутальной погрешности ΔE, суммарное напряжение Σ и расстояние R от цели до радара для дальнейшей обработки этих данных. Кроме того, радарная установка обычным способом способна выдавать информацию о скорости V цели.
На фиг. 3 представлена схема первого варианта радарной установки, работающей с орудием. Напряжение погрешностей DB, ΔE и Σ, выдаваемые радарным приемным устройством, данные о расстоянии R до цели и скорости V последней поступают в ЭВМ и серворегулятор 12, который обычным для данной отрасли способом управляет сервомотором 5 и сервомотором 6 так, чтобы свести к минимуму напряжения погрешностей. Благодаря этому ствол 3 направляется точно на цель.
Однако, орудие, направленное точно на цель, в общем случае промахнется ввиду воздействия силы земного тяготения на снаряд в полете, а также вследствие того, что цель имеет собственную скорость. Ввиду этого орудие должно быть направлено с определенным углом упреждения, компенсирующим указанные выше и другие баллистические факторы. В описываемой здесь радарной установке это можно сделать слегка поворачивая плоское зеркало 9. Для этого плоское зеркало 9 устанавливают с возможностью перемещения, например, на концах исполнительных устройств 13 /см. фиг. 2/. Соответствующим управлением устройствами 13 можно обеспечить поворот плоского зеркала 9 вокруг его центра в любом заданном направлении, например на угол f. Это приводит к повороту линии прицела радарной установки на угол 2f. При использовании радарной установки для автоматического сопровождения цели последняя, как уже указывалось выше, будет сопровождаться в первом рабочем режиме. По упоминавшимся выше данным ЭВМ и серворегулятор 12 будут определять необходимый угол упреждения. Перед стрельбой и во время ее установка на необходимый угол упреждения реализуется во втором рабочем режиме путем соответствующего регулирования устройств 13.
Для того, чтобы установить количество баллистических параметров, определяющих угол упреждения, необходимо знать точное положение ствола 3. С этой целью орудие 2 снабжено азимутальным кодирующим устройством 14 и кодирующим устройством возвышения 15, данные от которых поступают в ЭВМ и серворегулятор 12. Указанные кодирующие устройства могут быть с успехом использованы для начального направления на цель ствола 3 при получении данных о начальной позиции цели от другого датчика. ЭВМ и серворегулятор 12 будут управлять сервомоторами 5, 6 таким образом, чтобы положение ствола 3 соответствовало бы данным об этой начальной позиции, после чего используется хорошо известный в данной отрасли поисковый модулятор.
Если орудие 2 стреляет очередями, отдача направляющей 4 ствола 3, хотя и незначительная, может вызвать вибрацию антенны Кассегрена 1. Эта вибрация может привести к вращению антенны 1 вокруг центра тяжести и трансляциям как в направлении линии прицела, так и перпендикулярно ей. Последний вид трансляции практически не воздействует на точность наведения орудия, однако вращение вокруг центра тяжести и трансляция в направлении линии прицела нежелательны и могут понадобиться дополнительные средства для уменьшения их отрицательного воздействия. Вращение вокруг центра тяжести непосредственно воздействует на величину напряжений погрешностей. Однако поворот на угол f может быть компенсирован поворотом плоского зеркала 9 на угол 1/2φ. С этих позиций зеркало 9 должно иметь по возможности облегченную конструкцию, а регулирование устройств 13 должно иметь достаточно широкий диапазон, чтобы компенсировать упомянутое обусловленное стрельбой вращение. Устройства 13 могут быть выполнены в виде соленоидальных линейных двигателей, работающих по принципу звуковой катушки, причем необходимая точность достигается в этом случае путем использования обратной связи. Существенно также, чтобы рабочая частота радара была по возможности высокой, так как только в этом случае размеры антенны Кассегрена 1 будут достаточно малы, и как следствие плоское зеркало 9 будет также небольшим и легким, чтобы широкий диапазон его регулирования мог быть легко осуществим.
Трансляция в направлении линии прицела приводит к тому, что неподвижные объекты приобретают кажущуюся допплеровскую скорость. Это может вызвать существенное ухудшение показателей радарной системы, тем более в данной области применения, где используются радары типа MTI и MTD /индикатор или детектор движущейся цели/. Особенно когда цель движется вблизи горизонта, указанные явления могут вызвать резкое усиление помех и привести к потери цели, причем этот эффект усиливается с увеличением рабочей частоты радара.
Радарные установки типа MTD точно определяют скорость цели, используя допплеровские фильтры частот, причем информация о скорости используется для выявления цели. Трансляция антенны Кассегрена 1 в направлении линии прицела снижает точность определения скорости, что также может привести к потери цели. Этот эффект также увеличивается с увеличением частот, на которых работает радар.
Компромисс между размерами антенны Кассегрена 1 и вышеупомянутыми проблемами может быть достигнут, если частота, на которой работает радар, составляет 15-30 ГГц. На этих частотах необходимо компенсировать упомянутые выше трансляции /в направлении линии прицела/. Эта компенсация возможна с помощью плоского зеркала 9, которое необходимо перемещать на расстояние d/2 при трансляции антенны Кассегрена 1 в зоне шириной d.
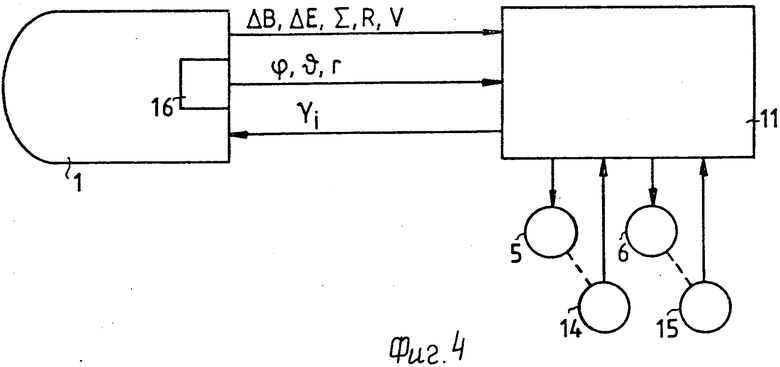
На фиг. 4 представлена схема второго варианта радарной установки, действующей совместно с орудием, в которой осуществлена упомянутая выше компенсация. Как показано на фиг. 4, антенна Кассегрена снабжена блоком датчиков 16, который вырабатывает сигналы v и n, характеризующие повороты в направлении азимута и возвышения. Кроме того, блок 16 вырабатывает сигнал r, выражающий трансляцию по линии прицела. Для выполнения этих функций блок 16 содержит гравитационно скомпенсированный датчик ускорения в направлении линии прицела с подключенным интегратором, Для выработки сигналов v и n блок 16 включает, например, подключенный к двум интеграторам гидродатчик для определения угловых скоростей в направлении азимута и возвышения. Путем возбуждения упомянутых интеграторов непосредственно перед стрельбой очередями возможно точно определить трансляцию и вращения. Измеренные величины v, n, r передаются на ЭВМ и серворегулятор 12, которые определяют необходимую величину компенсации и компенсируют вращения, вызываемые /стрельбой/ орудия, вводя необходимую коррекцию угла упреждения путем подачи на n устройств /линейных двигателей/ 13 сигналов управления gi= 1,.....,n /, которые поворачивают на соответствующий угол плоское зеркало 9/.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140658C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2113716C1 |
| РЕШЕТКА ИЗЛУЧАЮЩИХ ЭЛЕМЕНТОВ | 1995 |
|
RU2140691C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140657C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1996 |
|
RU2137149C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 1996 |
|
RU2131106C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1997 |
|
RU2131133C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С КАЛИБРОВОЧНОЙ СЕТЬЮ | 1996 |
|
RU2131160C1 |
| ПЕРЕДАЮЩАЯ СХЕМА | 1995 |
|
RU2121734C1 |
| АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕНИЯ НА СУДНЕ | 1995 |
|
RU2131114C1 |
Радарная установка, содержащая антенну Кассегрена 1,7-9, установленную на стволе орудия. Антенна Кассегрена с поворотом плоскости поляризации имеет плоское регулируемое зеркало 9, используемое для генерирования угла упреждения. Кроме того, вибрации, возникающие вследствие стрельбы орудия и передаваемые на антенну Кассегрена 1,7-9, компенсируются путем регулирования зеркала 9 таким образом, что радиолокационный луч, генерируемый антенной Кассегрена 1,7-9, не подвержен влиянию вибраций. 9 з.п. ф-лы, 4 ил.
| Патент ЕПВ N 0198964, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |

