Изобретение относится к устройствам для обнаружения целей, содержащим узел обнаружителя, установленный с возможностью вращения вокруг, по крайней мере, в основном вертикальной поисковой оси, причем узел снабжен фокусирующим устройством и детектором в виде линейной антенной решетки для циклического генерирования двухмерного изображения, представляющего окружение устройства, также экстрактор цели, соединенный с детектором для генерации координат обнаруженных потенциальных целей.
Устройства такого типа известны из EP-B 0.205.794.
Задачей изобретения является уменьшение количества ложных тревог, генерируемых узлом обнаружителя. Без использования экстрактора цели узел обнаружителя обычно генерирует тысячи ложных тревог на оборот. Если экстрактор цели обладает всеми известными в данной отрасли характеристиками, это количество может быть уменьшено до нескольких ложных тревог на оборот. Путем использования нескольких детекторов в узле обнаружителя и путем комбинирования изображений, генерируемых этими детекторами, количество ложных тревог может быть еще более уменьшено.
Данное изобретение также направлено на уменьшение количества ложных тревог путем более тщательного исследования каждой обнаруженной потенциальной цели. В связи с этим данное устройство характеризуется тем, что оно дополнительно содержит оптическое устройство для верификации/проверки истинности/ обнаруженных потенциальных целей, причем это устройство контролируется на основе данных, генерированных экстрактором цели.
В предпочтительном варианте верификационные устройства образуют интегральную часть узла обнаружения, но не имеют возможности вращения. При этом оптические оси оптических устройств для верификации, по крайней мере, в основном совпадают с поисковой осью.
В наиболее предпочтительном варианте узел обнаружения расположен так, что он имеет возможность вращения вокруг полой поисковой оси, а оптическое верификационное устройство расположено внутри этой полой оси.
Еще один предпочтительный вариант изобретения характерен тем, что оптическое устройство для верификации содержит оптическое окно, выполненное в стенке секции полой поисковой оси, причем указанная секция расположена выше узла обнаружителя, а также тем, что оптическое устройство верификации содержит зеркало, установленное в полой поисковой оси. Азимутальное направление этого зеркала, а также направление возвышения могут, на основании данных, генерированных экстрактором цели, быть отрегулированы таким образом, что излучение, испускаемое выбранной потенциальной целью направлялось бы, по крайней мере, в основном параллельно поисковой оси.
Еще один предпочтительный вариант изобретения имеет то достоинство, что оптическое окно выполнено плоским. При этом этот вариант характерен тем, что оптическое окно может, на основе данных, генерируемых экстрактором цели, быть отрегулировано таким образом, что его азимутальное направление, по крайней мере, в основном совпадает с азимутальным направлением упомянутого зеркала.
Описанное выполнение позволяет использовать для оптической верификации различные оптические устройства, которые могут быть установлены в полой поисковой оси.
В первом предпочтительном варианте оптического устройства верификации оно содержит оптический детектор /фотоприемник/ типа следящей антенной решетки. Такой детектор является наиболее подходящим для верификации потенциальной цели, так как он в общем случае обеспечивает более длительный период накопления /интеграции/ и имеет более высокое угловое разрешение, чем роторное линейное антенное устройство, используемое для пространственного поиска.
Во втором предпочтительном варианте оптическое устройство для верификации содержит лазерный дальномер, который кроме верификации цели выдает также ее дальность.
В третьем предпочтительном варианте оптическое устройство для верификации содержит доплеровский лазерный детектор с непрерывным излучением, который кроме верификации цели выдает также скорость цели и ее дальность.
Особо предпочтительный вариант данного устройства характерен тем, что это устройство снабжено установленным в полости детектором типа следящей антенной решетки, лазерным дальномером и доплеровским лазерным детектором с непрерывным излучением, а также устройством для выборочного использования каждого из перечисленных устройств для верификации при соответствующих условиях работы.
Если применить полую поисковую ось достаточно большого диаметра, то несколько верификационных устройств можно использовать одновременно.
Ниже приведено более подробное описание изобретения со ссылками на чертеже, где в схематичном виде представлено поперечное сечение одного из возможных вариантов данного устройства.
В этом варианте узел обнаружения 1 содержит детекторы 2, 3, вращающиеся вокруг полой оси 4, которая жестко закреплена на основании 5, например, на палубе судна. Вращение осуществляется известными в данной отрасли средствами, такими, как приводы с встроенными подшипниками 6 и дополнительными подшипниками 7. Вращающееся сочленение 8 используется для соединения проводов энергоснабжения и средств для передачи командных сигналов к узлу обнаружения 1 и выдачи выходных сигналов, генерируемых детекторами 2, 3. В полой оси 4 предусмотрена полость 9, служащая для размещения описываемых ниже оптических средств, образующих часть оптической системы верификации, причем оптическая ось этой системы по крайней мере в основном совпадает с продольной осью 10 полой поисковой оси 4. Верхняя часть 11 полой поисковой оси 4 может вращаться относительно поисковой оси 4 с помощью дополнительного подшипника и привода 12. Верхняя часть 11 также имеет плоское окно 13 и зеркало 14, установленное с возможностью покачивания вокруг оси качания 15. Это качательное движение осуществляется и контролируется линейным приводом 16.
Если вращающиеся детекторы 2, 3 наблюдают потенциальную цель, причем указанное наблюдение осуществляется главным образом экстрактором цели, связанным с детекторами через вращающееся сочленение 8. Указанный экстрактор определяет направление на потенциальную цель и от него поступают командные сигналы на привод 12 и линейный привод 16, которые срабатывают таким образом, что потенциальная цель может наблюдаться вдоль продольной оси 10 полой оси 4 через плоское окно 13 и зеркало 14. Во время наблюдения цели плоское окно 13 и зеркало 14, по крайней мере, в основном неподвижны. Альтернативное решение состоит в том, что плоское окно 13 и зеркало 14 управляются с помощью следящего компьютера, связанного с экстрактором цели с тем, чтобы отслеживать прогнозируемую или измеряемую траекторию цели. Окно 13 и зеркало 14 могут управляться также на основе получаемых сигналов крена и угла наклона таким образом, чтобы собственное движение платформы или судна, на котором данное устройство установлено, компенсировалось известным в данной отрасли способом.
Ниже описана оптическая система верификации с различными элементами, расположенными в полости 9. Эта система безотносительно к вращению узла обнаружения 1 и собственным движениям транспортного средства /судна/ позволяет отличить реальную цель от ложных тревог. Камера, снабженная детектором типа следящей антенной решетки, лучше всего подходит для осуществления таких функций. Предпочтение должно быть отдано при этом антенному устройству, чувствительному к инфракрасному излучению, так как оно больше подходит к спектральной чувствительности детекторов 2 и 3 и более того может быть с успехом использовано в ночных условиях и тумане. Надлежащий выбор среди известных систем линз, устанавливаемых перед антенной решеткой, обеспечивает значительно более высокое разрешение, чем у детекторов 2 и 3. Для того, чтобы увеличить чувствительность, период накопления /интеграции/ антенного устройства следует выбирать таким образом, чтобы он был значительно длиннее периода интеграции детекторов 2 и 3. В особенности комбинацией обоих указанных факторов можно обеспечить верификацию цели в любое время без существенного ухудшения времени реакции данного устройства.
Помимо того, что упомянутые решения позволяют надежно отличить, является ли обнаружение действительной целью или ложной тревогой, они дают возможность наблюдать такие детали, не доступные для детекторов 2 и 3, как тип самолета или судна, количество людей в резиновой шлюпке и т.п. Недостатком этих мер является то, что изображение в зависимости от положения зеркала 14 вместе с верхней частью 11 может вращаться. Этот недостаток можно преодолеть известным в данной отрасли способом, установив в полости 9 призму Дове с зубчатым приводом и вращая ее непрерывно в течение половины пеленга.
Другим наиболее предпочтительным средством верификации является лазерный дальномер, известный в данной отрасли, который следует разместить в полости 9. Мощность эхо, отражаемого потенциальной целью обычно, указывает, является данная цель истинной или нет. Более того дальность цели может быть определена просто по времени задержки.
Особенно предпочтительным верификационным средством является помещенный в полость 9 детектор с непрерывным излучением. Монохроматический лазерный луч, генерируемый, например, CO2-лазером, направляется на потенциальную цель с помощью зеркала 14 и плоского окна 13. Часть светового луча отражается и направляется вместе с опорным лучом, полученным из лазерного луча, на детектор, расположенный вблизи лазера, через плоское окно 13 и зеркало 14. Доплеровский сигнал, генерируемый детектором, может быть затем использован для определения размеров потенциальной цели и расстояния до нее. Путем линейного модулирования лазера по частоте можно получить информацию о дальности цели известным в данной отрасли способом.
Расположение упомянутых выше и возможных других оптических устройств в едином корпусе допускает выбор оптических средств верификации в зависимости от условий работы. Это осуществляется вручную или автоматически, например, с помощью размещения оптических устройств в специальном сменном приспособлении.
Дополнительным преимуществом данного устройства является то, что в полости 9 можно разместить другие подходящие оптические приборы, такие, например, как телекамеру, которая может быть использована как дополнительный навигационный прибор при вхождении в порт. Также в этом случае призма Дове, помещенная в полости 9, будет предотвращать вращение изображения, когда зеркало 14 вращается вместе с верхней частью 11. Телекамера, расположенная указанным образом, имеет то преимущество, что данное устройство обычно располагается в наиболее подходящей /для наблюдений/ части судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1997 |
|
RU2131133C1 |
| АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕНИЯ НА СУДНЕ | 1995 |
|
RU2131114C1 |
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140658C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С КАЛИБРОВОЧНОЙ СЕТЬЮ | 1996 |
|
RU2131160C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2113716C1 |
| РЕШЕТКА ИЗЛУЧАЮЩИХ ЭЛЕМЕНТОВ | 1995 |
|
RU2140691C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 1996 |
|
RU2131106C1 |
| ПЕРЕДАЮЩАЯ СХЕМА | 1995 |
|
RU2121734C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140657C1 |
Изобретение относится к устройствам для обнаружения целей, приближающихся на большой скорости. Оно содержит вращающийся оптический детектор (2,3) в виде линейной оптической решетки. С целью подавления ложных тревог устройство снабжено также полой вращающейся осью (4), содержащей зеркало (14), которое ориентировано как следящая антенная решетка, лазерным дальномером или доплеровским лазерным детектором с непрерывным излучением. Все указанные устройства размещены в полой вращающейся оси и могут быть направлены на потенциальную цель. Достигаемым техническим результатом является снижение количества ложных тревог. 6 з.п. ф-лы, 1 ил.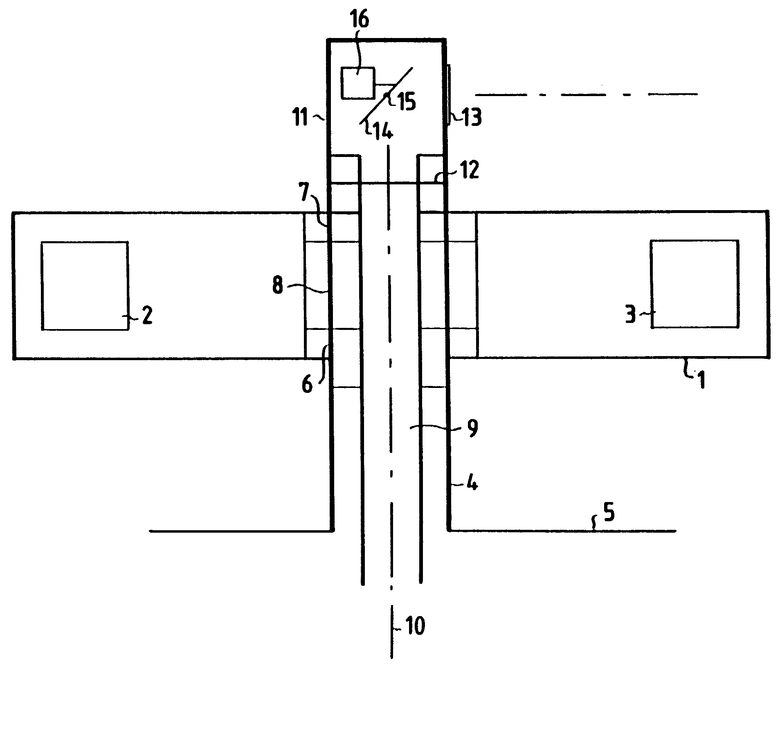
| ВИБРАЦИОННАЯ ПОГРУЗОЧНАЯ МАШИНА | 0 |
|
SU205784A1 |
| DE 3325483 A, 31.01.85 | |||
| Способ формирования радиолокационного изображения в реальном масштабе времени путем оптической корреляционной обработки сигналов и устройство для его осуществления | 1991 |
|
SU1801218A3 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |

