Данное изобретение относится к системам управления огнем, содержащей по крайней мере один указатель цели и связанное с ним компьютерное устройство, причем указатель цели приспособлен для обнаружения таких целей, как самолет и выдачи сигналов p/t/, относящихся к измеряемым положениям цели, а компьютерное устройство приспособлено для вычисления рассчитанного частотного параметра W и рассчитанной амплитуды A периодической составляющей сигналов цели s/t/, полученных из сигналов p/t/ и связанных с такими параметрами цели, как рассчитанные положения, скорости, ускорения цели.
Изобретение относится также к способам оценки частотного параметра W и амплитуды A периодической составляющей сигналов цели s/t/, полученных от измеренных положений цели, такой, как самолет и связанных с такими параметрами цели, как рассчитанные положения, скорости, ускорения.
В этом случае частотный параметр W может включать частоту или период сигналов цели, сигналы цели s/t/ могут включать линейную комбинацию рассчитанных или измеренных положений цели, ее скоростей или ускорений.
Системы управления огнем и способы такого рода известны. Они часто бывают необходимы для определения угла упреждения артиллерийской системы, связанной с системой управления огнем, для того, чтобы иметь возможность прогнозировать параметры траектории цели. Эти параметры включают не только прогнозные ее положения, но также скорости и ускорения цели. Целью при этом может быть самолет или ракета, выполняющие отвлекающие маневры. В таких случаях, как показывает практика, самолет часто летит по волнообразной траектории. Если период или частота и амплитуда волнообразной траектории известны, появляется возможность точного определения таких параметров цели, как ее положение или скорость в ближайшем будущем. Однако в действительности ни частота, ни амплитуда не известны. Тем не менее все-таки возможно проводить оценки на основе рассчитанных частоты и амплитуды.
Для системы управления огнем обязательным является быстрая реакция, т.е. в течение короткого промежутка времени на основе ограниченной информации система должна точно определить траекторию цели. Использование известных в данной отрасли фильтров Калмана не позволяет само по себе решить эту проблему, так как фильтры Калмана неизбежно требуют определенного времени для выхода на рабочий режим. Если лалетит по волнообразной траектории, частота которой постоянно изменяется, фильтры Калмана будут реагировать слишком медленно и не смогут с необходимой скоростью выдавать точные величины частоты и амплитуды траектории цели. Это частично можно объяснить тем, что фильтры Калмана оценивают частоту и амплитуду путем совместного расчета этих величин. Однако представляется более целесообразным определять с высокой точностью частоту независимо от амплитуды. На основе рассчитанной частоты возможно последующее точное определение и амплитуды. С помощью такого метода достижение точного результата требует меньше времени, чем с помощью фильтров Калмана.
Система управления огнем в соответствии с данным изобретением позволяет решить эту задачу и соответственно характеризуется тем, что компьютерные устройства выполнены с возможностью по крайней мере в основном непрерывно вычислять рассчитанный частотный параметр W, непрерывно используя рассчитанный частотный параметр W по крайней мере в основном непрерывно вычислять рассчитанную амплитуду A.
Способ в соответствии с данным изобретением характеризуется тем, что рассчитанный частотный параметр W по крайней мере в основном вычисляется непрерывно и рассчитанная амплитуда A, по крайней мере в основном вычисляется непрерывно с непрерывным использованием рассчитанного частотного параметра W.
В алгоритме прогнозирования траектории цели легко достичь повышенной точности, используя рассчитанное ускорение цели.
Другой предпочтительный вариант системы управления огнем в соответствии с данным изобретением характеризуется тем, что сигналы цели s/t/ включают рассчитанное ускорение цели.
Еще один предпочтительный вариант способа по данному изобретению характерен тем, что сигналы цели s/t/ включают рассчитанные сигналы ускорения.
Скоростной и эффективный способ проверки устанавливает обнаруживают ли сигналы цели s/t/ периодичность с определенной частотой Wo является их фильтрация с помощью полосового фильтра, имеющего высокий коэффициент усиления для этой частоты Wo и низкий коэффициент усиления для других частот. Этот фильтр предпочтительно содержит фильтр второго порядка с низким коэффициентом затухания и резонансной частотой Wo с тем, что этот фильтр требует малого компьютерного времени. Возможно также использование фильтров более высокого порядка, с помощью которых может быть достигнут крутой спад амплитудно-частотной характеристики. Чем ближе частота s/t/ к Wo, тем больше абсолютная величина выходного сигнала фильтра. Таким образом, сопоставляя абсолютную величину выходного сигнала фильтра с таковыми s/t/ для частот вблизи Wo можно установить, имеются ли они в s/t/ или нет. Путем подбора необходимых характеристик фильтра можно увеличить или уменьшить избирательность. Однако, если приходится определять частоту сигналов s/t/ в широком диапазоне частот, одного фильтра недостаточно, так как для частот, которые отдалены от Wo нельзя установить с помощью одного фильтра содержатся ли они в s/t/. Здесь необходимо обрабатывать s/t/ одновременно множеством фильтров, чувствительных к различным частотом. Периодичность s/t/ может быть почти мгновенно определена путем сопоставления выходных сигналов каждого фильтра.
В связи с этим другой предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные устройства содержат N фильтров Fi, i =l,......, N где каждый фильтр Fi чувствителен к сигналам частотного параметра Wi, принадлежащего данному фильтру Fi и где сигналы цели s/t/ подаются на вход каждого фильтра Fi; данный вариант характерен также тем, что компьютерные устройства выполнены с возможностью вычисления рассчитанного частотного параметра W на основании выходных сигналов N фильтров Fi.
Чтобы поддерживать сравнимость указанных выходных сигналов целесообразно устанавливать одинаковые усиления каждого фильтра для частот чувствительности /т.е. резонансных частот/, принадлежащих каждому из них.
В связи с этим один из предпочтительных вариантов системы управления огнем по данному изобретению характерен тем, что каждый фильтр Fi для синусоидального входного сигнала с частотным параметром Wi, принадлежащим данному фильтру Fi имеет коэффициент усиления сигнала, по крайней мере, в основном один и тот же.
В связи с этим еще один предпочтительный вариант способа по данному изобретению характерен тем, что каждый фильтр Fi для синусоидального входного сигнала с частотным параметром Wi, принадлежащим фильтру Fi, имеет коэффициент усиления сигнала по крайней мере в основном один и тот же.
При определении последовательных резонансных частот различных фильтров выбирают предпочтительно постоянное соотношение между последовательными резонансными частотами по логарифмической шкале. Благодаря этому поддерживается при сравнительно высоких частотах различимость между любыми двумя формами сигналов, принадлежащими к двум последовательным резонансным частотам.
В связи с этим еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что частотный параметр Wi включает частоты ωi, которые по крайней мере в основном эквидистантны по логарифмической шкале.
Также в связи с этим еще один предпочтительный вариант способа по данному изобретению характерен тем, что частотные параметры Wi включают частоты ωi, которые по крайней мере в основном эквидистантны по логарифмической шкале.
Для определения частоты сигнала s/t/ целесообразно определять амплитуду для каждого выходного сигнала фильтра и определять затем для какого из фильтров выходная амплитуда максимальна. Сигналы выходной амплитуды предпочтительно определяются по абсолютным величинам выходных сигналов и последующего пропускания сигналов-абсолютных величин через фильтр нижних частот. Рассчитанная частота s/t/ может быть затем приравнега к резонансной частоте этого фильтра. С помощью этого способа можно быстро и эффективно определять рассчитанную частоту.
В связи с этим еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные устройства выполнены с возможностью определения амплитуд Ai выходных сигналов фильтров Fi и определения рассчитанного частотного параметра W с использованием частотных параметров Wi и амплитудных величин Ai.
Также в связи с этим предпочтительный вариант способа по данному изобретению характерен тем, что определяют амплитуду Ai выходных сигналов фильтров Fi и тем, что, используя частотные параметры Wi и амплитудные величины Ai, определяют рассчитанный частотный параметр W.
Если это желательно, может быть выполнена интерполяция по амплитудам выходных сигналов каждого фильтра и рассчитанная частота s/t/ может быть приравнена той частоте, где интерполяция достигает общего максимума. В результате этого повышается точность определения и появляется возможность уменьшения количества различных фильтров, что экономит компьютерное время.
В связи с этим еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные устройства изготовлены с возможностью выполнения интерполяции по ординатам Аi при использовании частотных параметров Wi в качестве абсциссы, а также тем, что компьютерные устройства выполнены с возможностью получения рассчитанного частотного параметра W по частотному параметру, для которого обнаружен общий /global/ максимум по интерполяции.
Также в связи с этим предпочтительный вариант способа по данному изобретению характерен тем, что, используя частотные параметры Wi как абсциссу и амплитуду Ai как ординату по Wi, производят интерполяцию по ординатам Ai, а также тем, что рассчитанную величину частотного параметра W определяют по частотному параметру, который соответствует общему /global/ максимуму по интерполяции.
Если разработана качественная оценка частоты s/t/, то с ее помощью может быть осуществлена и достаточно точная оценка амплитуды s/t/. Очевидный способ решения этой задачи - это адаптация двух синусоидальных сигналов данной частоты, которые сдвинуты по фазе на 90o по отношению к s/t/ путем адаптирования амплитуд этих синусоидальных сигналов с помощью алгоритма оценивания по методу наименьших квадратов. Этот способ однако имеет тот недостаток, что величины синусоидальных сигналов должны непрерывно рассчитываться, а это поглощает много компьютерного времени. Гораздо более выгодно адаптировать амплитуды сигналов, имеющих прямоугольную форму волны с расчетной частотой, так как компьютерный обсчет параметров сигналов такой формы требует очень малого компьютерного времени. Для адаптации амплитуд прямоугольных сигналов к сигналам цели s/t/ с помощью метода наименьших квадратов необходимо иметь в распоряжении период времени, соответствующий интегрально сигналу цели s/t/ в течение положительной части прямоугольной волны, т.е. половине периода прямоугольной волны и в течение отрицательной части прямоугольной волны, т. е. также половине периода прямоугольной волны. В этом случае целесообразно определять выборочные сигналы цели s/t/ и адаптировать выборочную прямоугольную волну к выборочным сигналам цели.
Более того, возможно также, что сигналы цели были получены из сигналов выбранных ранее, таких как сигналов положения. Вышеупомянутый временной интеграл в этом случае превращается в суммирование. При этом целесообразно запоминать дискретно сигналы цели в циклической буферной памяти в течение по крайней мере полного периода наименьшей частоты, который может быть рассчитан. Это значит, что в случае, если буферная память будет полностью заполнена, имеет место возвращение к первому элементу буферной памяти. Таким образом, для каждого выборочного момента времени имеется в распоряжении сумма по выборочным моментам времени по s/t/. Суммирование по определенному интервалу, образованному некоторым числом выборочных моментов времени, может быть теперь получено непосредственно путем вычитания численного значения в буферной памяти в начале интервала из численного значения в буферной памяти в конце интервала. Содержание буферной памяти может быть теперь использовано для каждой компьютерной операции, требующей сигналы цели, суммированные по выборочным моментам времени.
В связи с этим еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что система приспособлена для определения выборочных сигналов цели s/t/ и тем, что предусмотрена циклическая буферная память и средства для запоминания выборок сигналов цели s/t/ дифференцированно в последовательных элементах памяти циклической буферной памяти.
Также в связи с этим преимущественный вариант способа согласно данному изобретению характерен тем, что сигнал цели s/t/ включает выборочный сигнал и тем, что выборки сигналов цели s/t/ дискретно запоминаются в последовательных элементах памяти циклической буферной памяти.
Если дискретные сигналы цели заведены в буферную память, становится целесообразным их использование для определения рассчитанной амплитуды Ai, что требует лишь очень ограниченного количества компьютерных операций. В связи с этим еще один предпочтительный вариант данной системы управления огнем характерен тем, что компьютерные средства выполнены с возможностью определения рассчитанной амплитуды A на основе величин, заведенных в циклическую буферную память.
Также в связи с этим еще один предпочтительный вариант способа по данному изобретению характерен тем, что рассчитанную амплитуду A определяют на основе величин, заведенных в циклическую буферную память, и рассчитанного частотного параметра W.
При определении выборочных сигналов s/t/ целесообразно предусмотреть постоянное выборочное время, например, с помощью временного сигнала; возможно при этом, что сигналы s/t/ получены от позиционных сигналов, выбранных при постоянном выборочном времени. В этом случае упрощаются компьютерные операции, которые должны выполняться с выборочными сигналами.
В связи с этим предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные средства выполнены с возможностью придания определенного времени удержания в циклической буферной памяти заданных величин, причем разница между временами достоверности последовательных величин в основном постоянна.
Также в связи с этим преимущественный вариант способа согласно данному изобретению характерен тем, что величины заводят в циклическую буферную память дискретного сигнала цели g/ti/ и тем, что эти величины имеют времена достоверности в дискретные моменты времени ti, которые по крайней мере приблизительно эквидистантны.
Данная система управления огнем может быть еще более усовершенствована путем применения средств для определения величин дискретного сигнала цели между выборочными моментами времени. Благодаря этому появляется возможность в любой момент времени определить сумму выборочных сигналов цели.
В связи с этим еще один преимущественный вариант системы управления огнем в соответствии с данным изобретением характерен тем, что компьютерные устройства выполнены с возможностью определения дискретных сигналов цели g/t/ на основе величин g/ti/, заведенных в циклическую буферную память, где t-время или промежутки времени между дискретными моментами времени /ti/.
Также в связи с изложенным преимущественный вариант способа по данному изобретению характерен тем, что дискретные сигналы цели g/t/ определяют на основе величин g/ti/, заведенных в циклическую буферную память, где t-время, возможно также промежутки времени между моментами времени ti.
Способ определения величин дискретных сигналов цели в промежутках между выборочными моментами времени сводится к линейной интерполяции между любыми выборочными моментами времени. Такой способ достаточно точен и требует лишь незначительных компьютерных мощностей.
В связи с этим еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные устройства выполнены с возможностью определения величин g/t/ посредством линейной интерполяции в промежутке между величинами g/ti/ дискретных сигналов цели, хранящихся в циклической буферной памяти.
Также в связи с изложенным предпочтительный вариант способа по данному изобретению характерен тем, что величины g/t/ определяют с помощью линейной интерполяции между величинами дискретных сигналов цели g/ti/, хранящихся в циклической буферной памяти.
Таким образом, имеется возможность определения по отношению к выборкам, введенным в самый последний момент в буферную память, дискретные сигналы цели в любой момент прошлого. При этом представляется целесообразным адаптировать, быстро и надежно в любой момент, волну прямоугольной формы, имеющую длину волны, соответствующую в период оценки таковой выборочного сигнала цели. При этом целесообразно производить адаптацию каждый раз двух прямоугольных волн, которые сдвинуты одна относительно другой приблизительно на четверть периода, так как информация о фазе также имеется в этом способе. Эталонная выборка, заведенная в буферную память, служит основой для адаптирования прямоугольных волн в течение всего периода в прошлом. Разумеется, было бы целесообразно продолжить в прошлое на несколько периодов, однако это привело бы к увеличению потребного объема буферной памяти и компьютерного времени. В течение полупериода положительной ветви и полупериода отрицательной ветви суммирование выборочных сигналов цели за полупериод может быть определено для каждой прямоугольной волны путем вычитания общей суммы в начале полупериода из общей суммы в конце этого полупериода, затем для каждой прямоугольной волны эти две суммы могут быть вычтены одна из другой. Для каждой прямоугольной волны таким образом получают рассчитанную амплитуду соответствующей прямоугольной волны и таким образом из этих двух амплитуд получается рассчитанная амплитуда A. Так как обе суммы имеются в буферной памяти, эта операция производится очень быстро.
С учетом изложенного еще один предпочтительный вариант системы управления огнем по данному изобретению характерен тем, что компьютерные устройства приспособлены для определения рассчитанного периода T и для последующего определения
a1 = /x1 - 2x3 + x5//T;
a2 = /x1 - 2x2 + 2x4 - x5//T,
где x1 - по крайней мере, в основном равен klg/tr/;
x2 - по крайней мере, в основном равен klg/tr - T/4/;
x3 - по крайней мере, в основном равен klg/tr - T/2/;
x4 - по крайней мере, в основном равен klg/tr - 3T/4/;
x5 - по крайней мере, в основном равен klg/tr -T/,
где tr представляет собой время хранения величины, заведенной в циклическую буферную память, k1 - коэффициент масштабирования, например определяемый числом 1.
В связи с изложенным еще один предпочтительный способ согласно данному изобретению характерен тем, что рассчитанный период T и затем величины
a1 = /x1 - 2x3 + x5//T и
a2 = /x1 - 2x2 + 2x4 - x5//T
определены указанными выражениями,
где x1 по крайней мере, в основном равен klg/tr/,
x2 по крайней мере, в основном равен klg/tr - T/4/,
x3 по крайней мере, в основном равен klg/tr - T/2/,
x4 по крайней мере, в основном равен klg/tr - 3T/4/,
x5 по крайней мере, в основном равен klg/tr - T/,
где tr - время хранения величины, заведенной в циклическую буферную память, k1 - коэффициент масштабирования, например число 1.
При этом целесообразно принять в качестве базовой самую последнюю по времени выборку, так как это позволит оценить самую последнюю по времени величину амплитуды.
В связи с этим еще один предпочтительный вариант системы управления огнем согласно данному изобретению характерен тем, что tr представляет время достоверности величины, заведенной в буферную циклическую память в самый последний момент по времени.
Также еще один наиболее предпочтительный вариант способа согласно данному изобретению характерен тем, что tr - это время достоверности величины, заведенной в циклическую буферную память в самый последний момент по времени.
При расчете рассчитанной амплитуды A, целесообразно использовать тот факт, что две прямоугольные волны, сдвинутые на четверть периода по фазе, это ортогональные функции, поэтому теорема Пифагора может быть применена при расчете амплитуды для каждой прямоугольной волны. Если желательно, коэффициент масштабирования также может быть здесь использован.
В связи с этим еще один предпочтительный вариант системы управления огнем согласно данному изобретению характерен тем, что компьютерные устройства выполнены с возможностью определения рассчитанной амплитуды A по уравнению
где k2 и k3 - коэффициенты масштабирования, равные, например, 1.
Также в связи с изложенным предпочтительный вариант способа в соответствии с данным изобретением характерен тем, что рассчитанная величина амплитуды A определена уравнением
где k2 и k3 - коэффициенты масштабирования, равные, например, 1.
Начиная с прямоугольных волн, возможно с хорошей точностью адаптировать синусоидальные сигналы к сигналам цели путем надлежащего выбора коэффициентов масштабирования. Если сигналы цели s/t/ имеют чисто синусоидальную форму, этот способ оценки амплитуды будет абсолютно точным.
В соответствии с этим еще один предпочтительный вариант системы управления огнем согласно данному изобретению характерен тем, что  по крайней мере, в основном равно π/2.
по крайней мере, в основном равно π/2.
Также в связи с изложенным еще один предпочтительный вариант способа согласно данному изобретению характерен тем, что  по крайней мере, в основном равно π/2.
по крайней мере, в основном равно π/2.
Система управления огнем и способ согласно данному изобретению ниже будут рассмотрены со ссылками на чертежи, где
фиг 1 представляет вариант системы управления огнем соответственно данному изобретению, а также связанную с ней систему оружия;
фиг 2 представляет вариант системы управления огнем, в которой определяются частота и амплитуда сигнала цели;
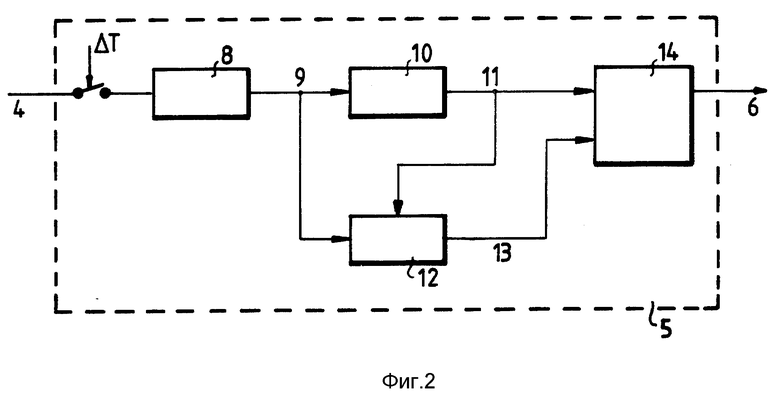
фиг 3 представляет вариант части системы управления огнем, в которой определяется частота;
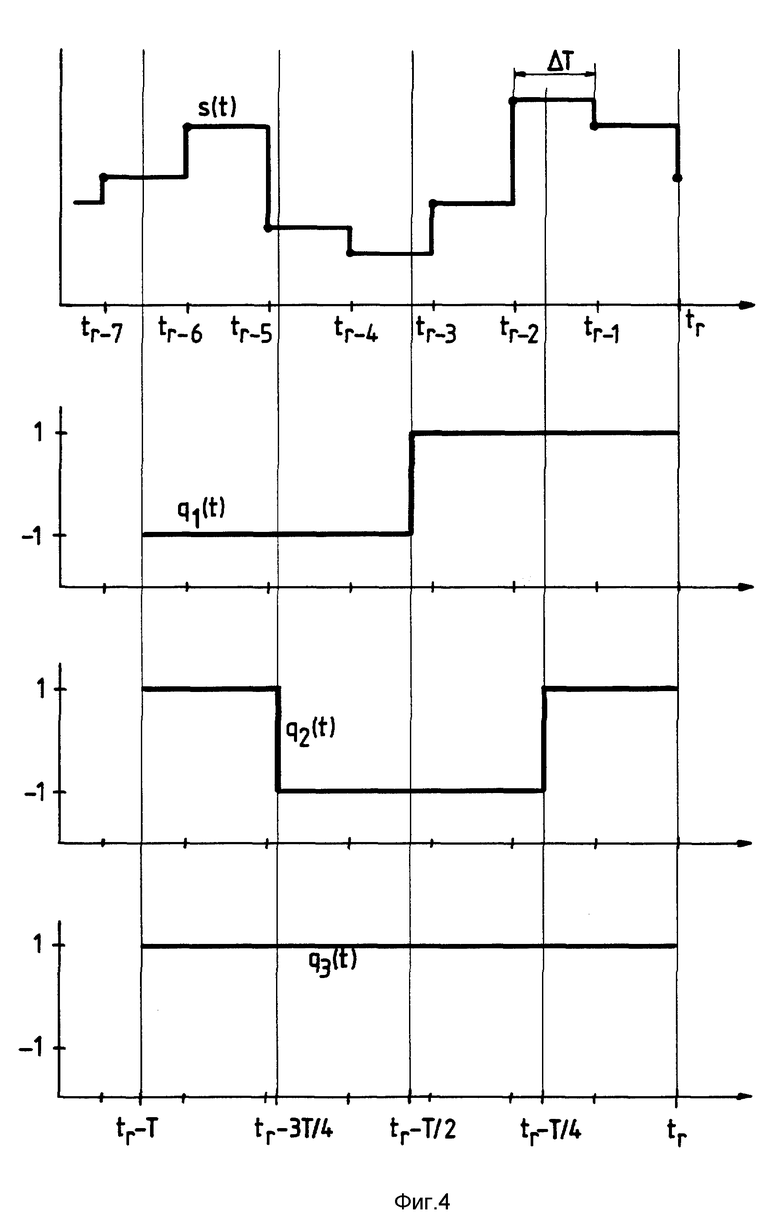
фиг. 4 - график, представляющий выборочные сигналы цели и адаптированные к ним прямоугольные волны.
Один из вариантов системы управления огнем согласно данному изобретению показан на фиг 1. Система управления огнем включает датчик цели 1, описанный здесь как следящий радар. Могут быть, однако, использованы другие типы датчиков, например, оптические. Следящий радар приспособлен для слежения за целью 2, которая летит по волнообразной траектории 3. Датчик цели подает сигналы 4 положения цели в компьютерный узел 5. Возможно также, что датчик цели подает сигналы скорости и/или ускорения в компьютерный узел 5. Компьютерный узел 5 подает сигналы азимута и угла возвышения 6 в артиллерийскую систему 7, которая может также включать систему ракетного огня или любую другую систему уничтожения цели. Компьютерный узел 5 выполнен с возможностью расчета частоты периодического компонента волнообразной траектории 3.
На фиг. 2 показан вариант компьютерного узла 5, приспособленного для системы управления огнем по данному изобретению. Сигналы цели 4 в этом варианте подвергнуты выборкам с периодом выборки T. Однако, возможно также, что подавленные сигналы цели уже были подвергнуты выборке. Выборочные сигналы цели подаются в схему оценки 8, которая оценивает /рассчитывает/ сигналы 9 ускорения цели на основе выборочных сигналов цели. Сигналы 9 ускорения затем подаются в схему 10 расчета частоты, которая определяет практически непрерывно по крайней мере в выборочные моменты времени частоту сигналов ускорения цели, которые соответствуют самому последнему выборочному моменту времени. При выполнении этой операции принимается во внимание курс цели в течение определенного периода в прошлом. Определитель рекурсивности или FIR/конечный импульсный отклик/-фильтр может быть при этом применен. Если FIR-фильтр используется, то сигналы сверх определенного периода времени в прошлом не влияют более на результат оценки. При оценке /расчете/ частоты нет необходимости использовать рассчитанную амплитуду.
Схема расчета частоты выдает рассчитанную частоту и/или период 11, которая подается в схему расчета амплитуды 12. Схема 12 оценки амплитуды определяют рассчитанную амплитуду и фазу 13 на основе сигналов 9 рассчитанного ускорения цели и рассчитанного периода 11. Рассчитанный период 11 и рассчитанные амплитуда и фаза 13 подаются в устройство прогноза траектории цели 14, которое рассчитывает будущую позицию цели на основании указанных выше данных с предположением, например, синусоидальной формы траектории, имеющей амплитуду, частоту, фазу, соответствующие рассчитанным амплитуде, частоте и фазе. Периодические параметры траектории другого рода однако также возможны.
На основе прогнозируемого курса цели и других данных, существенных для управления огнем, таких, как положение артиллерийской системы, метеорологических условий и баллистических данных, генерируются азимут и угол возвышения для артиллерийской системы.
На фиг. 3 представлен возможный вариант схемы оценки частоты 10. Схема оценки частоты содержит множество фильтров 15, работающих параллельно. Каждый фильтр имеет собственную фиксированную резонансную частоту. Более того, фильтр может иметь фильтр второго порядка, возможны также применения фильтров более высокого порядка. Если выбрана высокая избирательность для каждого фильтра, требуется большое количество отдельных фильтров. При низкой избирательности необходимо иметь лишь небольшое количество фильтров, но при этом уменьшается точность схемы оценки. Целесообразный компромисс, обеспечивающий приемлемую точность при умеренном количестве фильтров достигается применением 14-16-ти фильтров второго порядка, где самая низкая резонансная частота около 0,1 Гц, а самая высокая резонансная частота - около 1 Гц.
Датчик абсолютной величины 16 определяет абсолютную величину сигнала, поступающего от фильтра 15. Эта абсолютная величина сигнала затем направляется в фильтр 17 для смягчения вертикальных пульсаций. Если входной сигнал 9 обнаруживает определенную частоту, то фильтр, имеющий резонансную частоту, достаточно близкую к указанной, будет выдавать высокий по абсолютной величине выходной сигнал. Сигналы профильтрованной абсолютной величины поступают в интерполятор 18, который для каждого выборочного момента времени непрерывно интерполирует между выходными сигналами фильтров, при этом ось частот служит абсциссой, а ось амплитуд-ординатой. Интерполированный сигнал 19 затем подается в блок 20, где определяются максимум интерполированного сигнала 19 и частота, при которой этот максимум имеет место. Эта величина и является рассчитанной частотой. Желательно, чтобы резонансные частоты фильтров 15 были эквидистантны по логарифмической шкале.
В другом возможном варианте фильтры 15 содержат корреляторы с синусоидальным сигналом. Здесь датчики 16 абсолютной величины и фильтры 17 могут быть устранены. Поскольку корреляция имеет место для каждого фильтра 15 с синусоидальными сигналами фиксированной частоты ωi, величины этих синусоидальных сигналов в выборочные моменты времени могут быть заведены в матрицу памяти заранее, что экономит компьютерное время. Фильтры 15 таким образом подают корреляционные величины в интерполятор 18.
Еще один предпочтительный вариант фильтров 15 включает рекуррентную схему оценки по методу наименьших квадратов, где для каждого фильтра амплитуда и фаза синусоидального сигнала адаптирована к сигналу цели посредством фиксированной частоты для каждого фильтра. Рекуррентная схема оценки по методу наименьших квадратов предпочтительно включает минимизатор для временного интеграла квадрата вычета resi, где
resi(t) = s(t)-b1sin(ωit)-b2sin(ωit)-b3
b1, b2, b3 - параметры, ωi - фиксированная частота для данного фильтра.
В минимизаторе предпочтительно используется экспонентальная функция забывания. Для каждого фильтра экспонентальная функция забывания имеет постоянную времени, которая равна по крайней мере в основном обратной величине, т. е. периоду фиксированной частоты соответствующего фильтра. Посредством вычетов res i, i = 1,....., N, и частот ωi, i = 1,....., N возможно определить коэффициенты качества, например
причем данные коэффициенты качества приложимы непосредственно к интерполятору 18. Здесь  вычет оценки, принадлежащий фильтру 15, усредненный по определенному периоду времени, предпочтительно порядка 1/ωi. Если частота сигналов цели около ωi, то соответствующий фильтр выдает наивысший коэффициент качества. При этом датчики абсолютной величины 16 и фильтры 17 могут быть устранены.
вычет оценки, принадлежащий фильтру 15, усредненный по определенному периоду времени, предпочтительно порядка 1/ωi. Если частота сигналов цели около ωi, то соответствующий фильтр выдает наивысший коэффициент качества. При этом датчики абсолютной величины 16 и фильтры 17 могут быть устранены.
На фиг. 4 показано на четырех графиках с идентичными осями времени как две прямоугольные волны могут быть адаптированы к сигналу s/t/. Сигнал s/t/ был выбран за период T. Верхний график показывает выборочный сигнал s/t/, где s/t/ между выборочными моментами времени tk поддерживается постоянным с помощью удерживающей цепи нулевого порядка. Три нижних графика представляют сигналы с прямоугольной формой волны g1/t/, g2/t/ и смещение g3/t/. Прямоугольные волны адаптированы, начиная с выборочного момента времени tr, предпочтительно равному наиболее ранней выборке за период T прямоугольной волны в прошедшем. Период T не обязательно равен всему множеству выборочного времени T, как указано тонкими вертикальными линиями, проходящими по всем четырем графикам. Амплитуда a1 и a2 прямоугольных волн и величина смещения a3 адаптированы с помощью метода наименьших квадратов.
Вообще параметрированный сигнал g/t/, имеющий параметры a1, a2, a3, может быть адаптирован к сигналу s/t/ путем минимизации критерия наименьших квадратов по a1, a2, a3. Этот метод используется в системе управления огня по данному изобретению. В одном варианте данного изобретения g/t/ составлен из суммарных параметризированных сигналов, таких как
g/t/=algl/t/+a2g2/t/+a3g3/t/.
Сигналы g1/t/ и g2/t/ имеют периодическую прямоугольную форму волн при амплитуде равной 1 и период, равный ранее определенному периоду T, как показано на фиг. 4. Сигналы g1/t/ и g2/t/ сдвинуты в основном на четверть периода по фазе. Сигнал g3/t/ постоянен по времени и инвариантно равен 1. Параметры a1 и a2, определенные путем минимизации критерия наименьших квадратов, являются мерами амплитуды s/t/, а параметр a3 - мера смещения s/t/ по отношению к некоторому эталону. В одном из вариантов данного изобретения с определенного момента времени tr, который предпочтительно равен периоду достоверности выборки s/t/, сигнал g/t/ адаптирован по отношению к сигналу s/t/ в течение всего периода в прошлом. Если желательно, возможна ретрогрессия на более чем полный период T. Чем больше периодов в прошлом принято во внимание, тем больший достигается эффект затухания в схеме оценки амплитуды.
К дополнительным преимуществам описанного способа оценки амплитуды относится то, что эффект затухания таким образом зависит от рассчитанного периода T, так как при малом периоде T ретрогрессия по времени меньше по сравнению с длинным периодом T. При меньшем периоде T подразумеваются быстротекущие вариации траектории цели. В этом случае желательно быстрое реагирование схемы оценки амплитуды, что достигается с помощью описываемого способа.
Можно показать, что критерий наименьших квадратов
минимизируется при предположении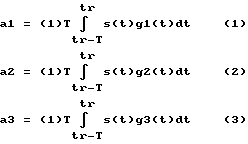
Таким образом, параметры a1, a2, a3 могут быть получены путем решения приведенных выше интегралов. При этом удобно использовать тот факт, что сигналы g n /t/, n = 1,.......,3 могут принимать только значения 1 или -1.
Соответственно появляется возможность использовать сигнал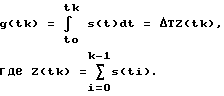
Более того, to - это определенный фиксированный начальный момент времени и tk - этот определенный конечный момент времени. Так как s/ti/ является выборочным и, следовательно, поддерживается удерживающей цепью нулевого порядка, появляется возможность использовать метод трапеции, а также алгоритмы интегрирования более высоких порядков. Z/tk/ может быть заведена в ряд элементов памяти для k = 0,1,2,......., и рекурсивно рассчитана, так как
Z /tk + 1/ = Z/tk/ + s/tk/
В этом случае s/tk/ дискретно запоминается в ряде элементов памяти. Величины g/t/, для которых t находится между моментами выборки /tk/ и /tk + 1/, могут быть определены с помощью линейной интерполяции между этими моментами выборки. Возможно также приравнять g/t/ величине g/tk/ ближайшей по времени, однако это даст менее точные результаты.
Интегралы в выражениях /1/, /2/, /3/ можно теперь разделить на субинтегралы по частям gn/t/ = 1 и частям, где gn/t/ = -1. Эти субинтегралы могут теперь быть определены путем использования сигналов g/t/, вычисленных предпочтительно путем интерполяции, где введены граничные значения по t для субинтегралов. Таким образом мы получим
al = /1T//g/tr/ - 2g/tr-T/2/+g/tr-T//
a2 = /1/T//g/tr/ - 2 g/tr - T/4/ + 2g/tr - 3T/4/ - g/tr -T.
a3 = /1/T/g/tr/ - g/tr - T//.
Отсюда явствует, что величины Z/tk/, взятые по некоторому времени, предшествующему периоду T по отношению к tk, должны быть заведены в ряд элементов памяти. Таким образом, может быть использована циклическая буферная память. Если буферная память полностью заполнена, возвращение к первому буферному элементу имеет место. При этом предыдущие значения Z/tk/, расположенные дальше, чем на период T в прошлом являются избыточно записанными. Для определения количества элементов буферной памяти, необходимо принять во внимание самый продолжительный период T, в течение которого можно оценить амплитуду.
Преимущество данного способа состоит в том, что он требует лишь незначительного количества сложений и умножений, а это улучшает быстродействие системы. Если желательно адаптировать синусоидальный сигнал, оценка амплитуды потребует расчета величин синусов, что связано с использованием значительно большего времени, чем при использовании описанного выше способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2113716C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1996 |
|
RU2137149C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1997 |
|
RU2131133C1 |
| АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕНИЯ НА СУДНЕ | 1995 |
|
RU2131114C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140658C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С КАЛИБРОВОЧНОЙ СЕТЬЮ | 1996 |
|
RU2131160C1 |
| РЕШЕТКА ИЗЛУЧАЮЩИХ ЭЛЕМЕНТОВ | 1995 |
|
RU2140691C1 |
| ПЕРЕДАЮЩАЯ СХЕМА | 1995 |
|
RU2121734C1 |
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140657C1 |
Данное изобретение относится к системам управления огнем и особенно к способам оценки периодического компонента траектории цели. Эффективная быстроустанавливающаяся схема оценки реализована путем оценки периода, а затем амплитуды указанного периодического компонента на основе ближайших по времени измерений. Технический результат заключается в повышении быстродействия системы. 1 с и 15 з.п.ф-лы, 4 ил.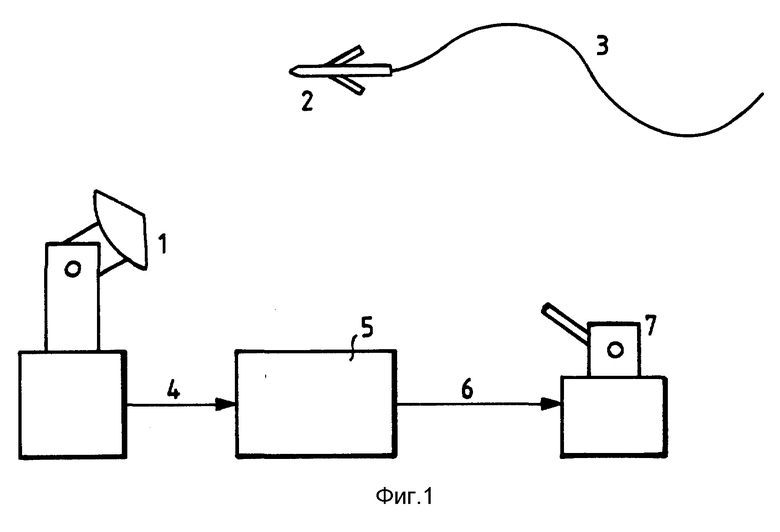
a1 = /x1 - 2x3 + x5//T;
a2 = /x1 - 2x2 + 2x4 - x5//T,
где x1 по крайней мере в основном равен k1g/tr/;
x2, по крайней мере в основном равен k1g/tr - T/4/;
x3 по крайней мере в основном равен k1g/tr - T/2/;
x4 по крайней мере в основном равен k1q/tr - 3T/4/;
x5 по крайней мере в основном равен k1g/tr - T/,
где tr - время достоверности величины, хранящейся в циклической буферной памяти, k1 - коэффициент масштабирования, например, равный 1. где k2 и k3 - коэффициенты масштабирования, равные, например, 1.
где k2 и k3 - коэффициенты масштабирования, равные, например, 1. по крайней мере в основном равно π/2.
по крайней мере в основном равно π/2.
| Экономайзер | 0 |
|
SU94A1 |
| 0 |
|
SU347968A1 | |
| Горный компас | 0 |
|
SU81A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| US 4665401 A, 12.05.87 | |||
| DE 2912587 C1, 07.05.86 | |||
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1971 |
|
SU434349A1 |
