Изобретение относится к устройствам для обнаружения целей, содержащим узел детектора, выполненного с возможностью вращения вокруг по крайней мере в основном вертикальной оси и снабженных датчиком и фокусирующим средством для фокусирования на датчике излучения, испускаемое целью или отражаемое целью. Такие устройства содержат также схему выделения точечной цели, действующей на ряде двухмерных матриц изображений X1, X2,... генерированных датчиком и представляющим окружение устройства для генерации предтревоги для каждой точечной цели, обнаруженной в одной из матриц изображений X1,
X2, ...
Устройства такого типа известны, например, из EP-B-0.205.794. Назначением схемы выделения точечной цели является уменьшение количества ложных тревог, генерируемых узлом детектора. Без схемы выделения точечной цели узел детектора вообще будет генерировать тысячи ложных тревог на оборот. Если схема выделения точечных целей обладает всеми особенностями, известными в данной области, то это количество может быт уменьшено до только незначительного числа ложных тревог на оборот. Это, однако, ограничивает область применения автономными автоматическими системами вооружения.
Количество ложных тревог может быть уменьшено с помощью требования исследования предтревоги в процессе последовательности оборотов. Недостатком такого подхода является потеря ценного времени, отводимого на реакцию устройства. Устройство по данному изобретению устраняет этот недостаток. Оно характерно тем, что узел детектора выполнен с возможностью генерирования на оборот по крайней мере двух матриц изображений, а также же оно снабжено комбинационной схемой для генерации обнаружения, если для по крайней мере двух матриц изображений, предобнаружение генерируется для соответствующих матричных элементов.
Первый вариант устройства по данному изобретению характерен тем, что узел детектора содержит первый датчик для генерирования на один оборот матрицы изображений Xi и второй датчик для генерирования на один оборот матрицы изображений Yi, причем направления возвышения и углы апертур обоих датчиков по крайней мере в основном корреспонденты/ те однозначно соответствуют друг другу/, а также тем, что комбинационная схема выполнена с возможностью генерации обнаружения, если по крайней мере два предобнаружения для соответствующих матричных элементов в ряду Xi, Yi, Xi 1, Yi 1, ... матриц изображений генерируются последовательно.
В этом случае целесообразно, чтобы оба датчика, несмотря на тот факт, что направления возвышения и углы апертур корреспондентны, все же обозревали потенциальную цель различным образом. Один из предпочтительных вариантов потому характерен тем, что спектральные характеристики первого и второго датчиков различны. Имея в виду спектральные окна в атмосфере, один из специальных вариантов характерен тем, что спектральная чувствительность первого датчика имеет максимум в диапазоне 3-5 микрон, а второго датчика - в диапазоне 8-12 микрон.
Другой предпочтительный вариант основан на использовании того факта, что для ложных тревог, особенно тех, которые вызываются отражениями солнца с водной поверхности, предпочтительнее определенные направления поляризации. Этот вариант поэтому характерен тем, что первый датчик и второй датчик - каждый снабжен поляризатором. Данный вариант характерен тем, что по крайней мере один поляризатор снабжен настроечным устройством, служащим для минимизации числа предтревог.
Еще один вариант изобретения целесообразен, если ложные тревоги генерируются соседними объектами, например птицами. Этот вариант характерен тем, что первый и второй датчики расположены рядом для генерации разности параллакса для по крайней мере ближайших целей, таким образом вынуждающих схему выделения точечных целей генерировать предтревоги для неидентичных матричных элементов, которые впоследствии не будут комбинированы в обнаружение комбинационной схемой.
В соответствии с другими вариантами изобретения становится возможным по крайней мере для выбранного азимутального сектора генерировать две матрицы изображения на оборот с помощью только одного датчика. Для этого узел детектора выполнен с возможностью вращения вокруг оси возвышения, которая расположена по крайней мере в основном перпендикулярно поисковой оси и линии прицеливания датчика. Этот вариант характерен тем, что он выполнен с возможностью такого вращения вокруг оси возвышения после генерирования каждой матрицы изображений, что последующая матрица изображений выбранного азимутального сектора может быть генерирована после половины оборота вокруг поисковой оси.
Наиболее предпочтительный вариант устройства, основанный на таком решении, характерен тем, что датчик установлен со сдвигом относительно эталонной оси с целью генерации разности параллакса для по крайней мере ближних целей в матрицах изображений, генерируемых последовательно.
Ниже изобретение описано со ссылками на следующие чертежи.
На фиг. 1 представлен возможный вариант изобретения.
На фиг. 1 схематично представлена возможная конструкция соответствующая данному изобретению.
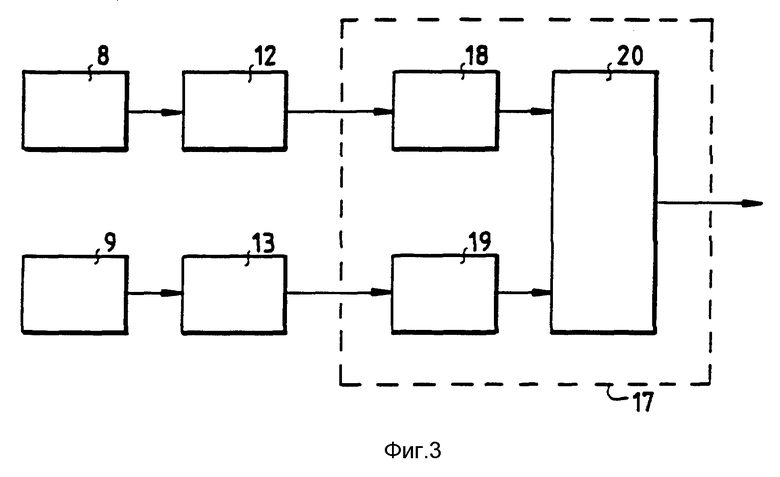
На фиг. 3 представлена блок-схема по данному изобретению.
На фиг. 1 показан возможный вариант устройства по данному изобретению, в котором узел детектора 1 имеет два окошечка 2.3, за которыми расположены датчики, воспринимающие излучение, испускаемое или отражаемое целью. Во время работы узел детектора 1 вращается вокруг вертикальной оси 4, закрепленной в опоре 5. Если изобретение используется на движущемся средстве, например, корабле, опора 5 обычно устанавливается на стабилизированной платформе, здесь не показанной. Опора 5 содержит привод для вращения поисковой оси 4 и роторный блок (не показан) через который поступают командные сигналы, электропитание и сигналы от датчиков.
Еще одно целесообразное решение, использованное здесь, заключается в том, что узел детектора 1 установлен с возможностью вращения вокруг оси вращения 6, что позволяет осуществить обзор под выбранным углом возвышения.
В наиболее упрощенном варианте привод возвышения 7 вращает оба датчика одновременно, в связи с чем их углы возвышения всегда совпадают.
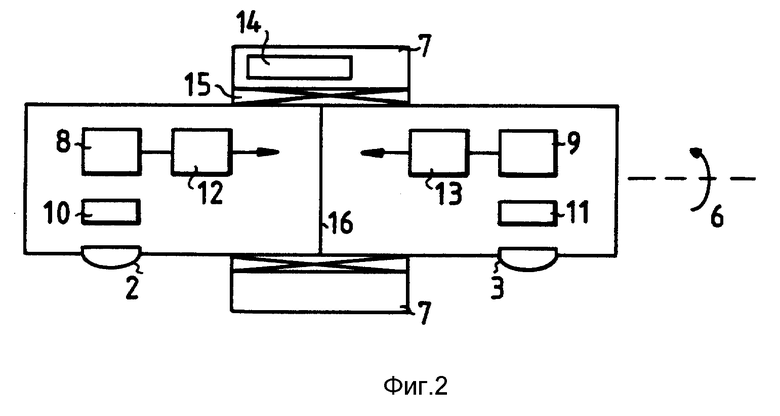
На фиг. 2 схематично представлено горизонтальное поперечное сечение возможной конструкции узла детектора 1, в котором устройство для фокусирования в виде окошечек 2 и 3 выполнено в виде линз, что, во-первых, позволяет эффективно герметизировать внутреннюю полость узла детектора 1, во-вторых позволяет передавать информацию об окружающей среде на датчики 8 и 9. Дополнительные оптические элементы 10, 11 так же, как автоматические диафрагмы, поляризаторы, могут быть установлены между окошечками 2, 3 и датчиками 8, 9. Датчики 8, 9 могут, конечно, быть приспособлены для любых длин волн, способных проникать через атмосферу. В данном изобретении датчики 8, 9 чувствительны к инфракрасному излучению и выполнены как одномерные решетки, чьи продольные оси примерно параллельны поисковой оси 4. Для применения в инфракрасной зоне линзы 2, 3 предпочтительно выполнены из монокристаллов германия.
При каждом обороте датчик 8 может генерировать матрицу изображений Xi всей или части окружающей среды, такой как выборочный сектор по азимуту, причем одномерность в матрице изображений является результатом применения одномерной решетки как таковой. Другое измерение представлено азимутальным направлением цели в результате сканирующего движения вследствие вращения вокруг поисковой оси 4. Аналогичным образом датчик 9 генерирует матрицу изображений Yi. Через предпроцессоры 12, 13, поисковую ось 4 и роторный узел, расположенный в опоре 5, выходной сигнал от датчиков 8, 9 подается в расположенный ниже стационарный процессор для дальнейшей обработки. Процессоры 12, 13 приспособлены для выполнения хорошо известных в данной отрасли функций, таких как предусиление и фильтрация сигналов, получаемых от датчиков, уплотнение этих сигналов, чтобы обеспечить их прохождение через роторный блок и, если необходимо, управление дополнительными оптическими элементами.
Привод возвышения 7 включает привод 14 и подшипники 15, которые обеспечивают вращение узла детектора 1 вокруг оси возвышения 6. Может оказаться целесообразным разделить узел детектора 1 по разделительной плоскости 16 и снабдить оба субдетектора своим приводом возвышения. Это дает возможность или выбирать одинаковые направления возвышения датчиков 8, 9 так, чтобы оба датчика сканировали по крайней мере в основном то же самый азимут или выбрать направления возвышения так, чтобы сканировались противоположные направления по азимуту.
На фиг. 3 представлена одна из возможных блок-схем по данному изобретению. Здесь данные от датчиков 8, 9 поступают в процессор 17 через предпроцессоры 12, 13. Цифровой процессор сигналов 17 включает известный в данной области экстрактор /устройство выделения/ сигналов точечной цели 18, который генерирует предобнаружение на своем выходе в случае обнаружения точечной цели в матрице изображений Xi, генерированной датчиками 8 за оборот или на один выборочный азимутальный сектор. Процессор 17 включает также второй в общем идентичный экстрактор точечной цели 19, который генерирует на своем выходе предобнаружение в случае обнаружения точечной цели в матрице изображений Yi, генерированной датчиком 9 за оборот или на один выборочный азимутальный сектор. Предобнаружения, генерируемые экстракторами точечной цели 18, 19 совмещаются затем в комбинационной цепи 20 таким образом, что обнаружение генерируется на выходе комбинационной цепи 20, если для двух соответствующих матричных элементов предобнаружение генерировано в двух матрицах изображений Xi и Yi, а это означает, что оба датчика наблюдают цель в одном и том же направлении.
Такая конструкция, имеющая совмещенные двойной датчик и комбинационную цепь, уменьшает возможность ложных тревог благодаря тому, что предобнаружение, вызванное, например, помехами не приводит к обнаружению, в то время как время реакции устройства не ухудшается существенно. Дальнейшее уменьшение вероятности ложных тревог можно достичь подбором различных типов датчиков с тем, чтобы они реагировали по-разному, например, на отражение солнца в воде. Это уменьшает риск того, что оба экстрактора точечной цели сгенерируют предобнаружение в такой ситуации. В этом контексте особенно привлекательна возможность выбора различных спектральных реакций двух детекторов, принимая во внимание спектральные окна в атмосфере. Желаемый эффект достигается выбором чувствительности датчика 8 в диапазоне 3-5 микрон, а датчика 9 - в диапазоне 8-1 микрон. Комбинационная цепь 20 может быть усилена, если генерация обнаружения будет происходить только в том случае, если интенсивности двух соответствующих матричных элементов, связанных с прогнозами, относятся друг к другу так же, как матричные элементы ожидаемой цели.
Такой подход основан на том, что цель - это, например, снаряд, у которого носовой конус имеет более высокую температуру, чем окружающая среда в результате поверхностного нагрева. Отношение интенсивностей инфракрасного излучения для двух различных спектральных областей может быть определено известным в данной области способом по температуре носового конуса.
Еще одно простое и эффективное средство получения различных реакций обоих датчиков - это применение дополнительных оптических элементов 10, 11 с поляризаторами, которые могут быть ориентированы, например, ортогонально. Для обеспечения оптимального функционирования по крайней мере один из поляризаторов имеет настройку, например, механизм с приводом, который на рабочем режиме ориентирует поляризатор таким образом, чтобы количество предтревог на один оборот было минимальным. Таким образом, особенно эффективно подавляются ложные тревоги от солнечных отражений в воде.
Еще одна хорошо известная проблема в этой области, а именно ложные тревоги, вызываемые птицами, летающими вблизи устройства, эффективно решается данным устройством, так как благодаря разности параллаксов от летающих птиц возникают предобнаружения для различных матричных элементов в матрицах Xi, Yi, в результате чего комбинационная цепь 20 не генерирует обнаружения. Иногда это может привести к отрицательным результатам, если оба датчика имеют различные спектральные характеристики. Это может быть устранено по крайней мере для некоторого выбранного азимутального сектора следующим образом. После генерирования матриц Xi, Yi вращают узел детектора 1 вокруг оси возвышения 6 так, чтобы матрицы Xi, Yi снова были определены примерно после половины оборота, когда датчики 8, 9 меняются местами. В результате этого становятся доступными четыре матрицы на оборот, которые в соответствующих спектральных зонах могут быть комбинированы парами в комбинационной схеме 20.
Кроме того, коэффициенты интенсивности могут быть сравнены для различных спектральных областей. Определенное внимание должно быть уделено тому факту, что матрицы таким образом альтернативно генерированные детекторами всегда являются зеркальным отображением ранее генерированных матриц.
Схемы выделения точечных целей 18, 19 могут быть скомбинированы в одну схему выделения точечных целей, которая попеременно обрабатывает выходные сигналы датчиков 8, 9. Возможно также устранить датчик 9 и предпроцессор 13, используя вращение узла детектора 1 вокруг оси возвышения каждый раз на полоборота. Это дает две матрицы на оборот, что образует разность параллакса. Благодаря этому предотвращаются ложные тревоги, происходящие от близких объектов. Кроме того, возможно изменять направление поляризации и/или варьировать спектральную чувствительность, благодаря чему все указанные усовершенствования могут быть реализованы на базе только одного датчика, однако только для выбранного азимутального сектора меньшего 180 градусов.
Узел детектора может содержать не показанные на чертежах фильтры, размещенные перед датчиками, для генерирования матриц изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 1996 |
|
RU2137149C1 |
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕНИЯ НА СУДНЕ | 1995 |
|
RU2131114C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 1996 |
|
RU2131106C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2113716C1 |
| РАДАРНАЯ УСТАНОВКА | 1995 |
|
RU2140658C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С КАЛИБРОВОЧНОЙ СЕТЬЮ | 1996 |
|
RU2131160C1 |
| РЕШЕТКА ИЗЛУЧАЮЩИХ ЭЛЕМЕНТОВ | 1995 |
|
RU2140691C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОГО ОРИЕНТИРОВАНИЯ ОБЪЕКТА | 1993 |
|
RU2107863C1 |
| СПОСОБ ЗАГОРИЗОНТНОГО ОБНАРУЖЕНИЯ ТЕХНОГЕННЫХ МОРСКИХ ОБЪЕКТОВ | 2020 |
|
RU2755075C1 |
Изобретение относится к устройствам, содержащим по крайней мере два датчика инфракрасного излучения (8, 9). Технический результат заключается в том, что с помощью этих детекторов количество ложных тревог может быть уменьшено путем сравнения матриц изображений, последовательно генерируемых за один оборот на основе предтревог, генерируемых в матрицах изображений схемами выделения точечных целей (18, 19). Между этими матрицами, генерированными последовательно, образована разница посредством различных спектральных характеристик, поляризаций и параллакса. 11 з.п. ф-лы. 3 ил.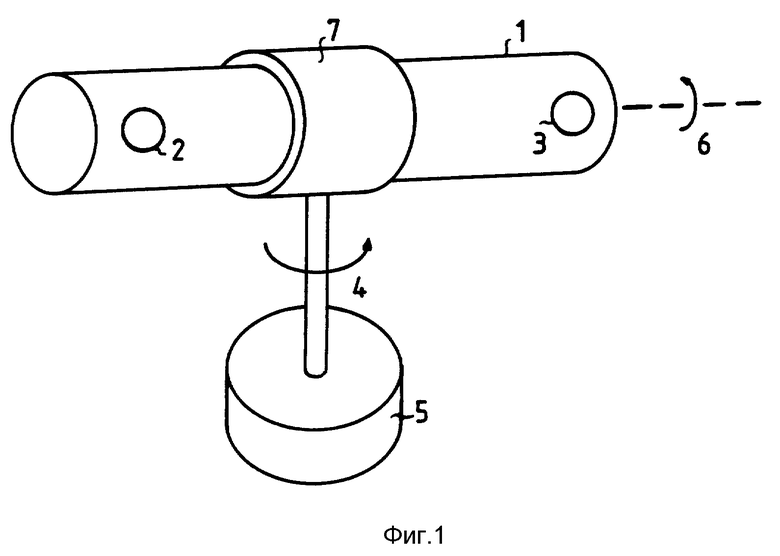
| ХОЛОДИЛЬНИК ПРОКАТНОГО СТАНА | 0 |
|
SU205794A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ КОМПОНЕНТ НАПРЯЖЕННОСТИ ТРЕХМЕРНОГО ЛАПЛАСОВСКОГО ПОЛЯ | 0 |
|
SU329540A1 |
| US 5270795 A, 14.12.93 | |||
| EP 0636901 A, 01.02.95 | |||
| US 4068124 A, 10.01.78 | |||
| ОПТИЧЕСКИЙ ЛОКАТОР | 1979 |
|
SU743401A1 |
