Изобретение относится к транспортному машиностроению, а именно к устройствам для блокировки дифференциалов транспортных средств, и может быть использовано для блокировки межосевых и межколесных дифференциалов.
Известен механизм блокировки дифференциала, использованный в системе блокировки межосевого дифференциала, содержащий автоматическую кулачковую муфту свободного хода, ведущая полумуфта которой связана с корпусом межосевого дифференциала с возможностью осевого перемещения, а ведомая жестко связана с передней полуосью последнего, и устройство принудительного выключения автоматической блокировки. (пат. США N 4280583 по М. кл. B 60 K 17/34, 1981).
Недостатком этого механизма блокировки является то, что он не обеспечивает автоматическую блокировку дифференциала в случае возрастания буксования колес заднего моста, что будет приводить к потере скорости движения и производительности транспортного средства. Кроме того, при движении транспортного средства по неровной поверхности механизм блокировки не позволяет колесам переднего моста ускорять свое вращение. В результате возможно возникновение паразитной циркулирующей мощности между ведущими мостами, дополнительно нагружающей ходовую систему, трансмиссию и повышающей износ шин.
Известен механизм блокировки дифференциала, использованный в ведущем мосту транспортного средства Шубина, содержащий две пары соосно расположенных и связанных друг с другом обгонной муфтой валов, другие концы которых посредством зубчатых рядов постоянного зацепления связаны с соответствующими полуосями, и четыре дополнительные обгонные муфты, посредством которых шестерни зубчатых рядов, размещенные на полуосях, связаны с последними, при этом передаточное отношение одного зубчатого ряда на каждой полуоси меньше передаточного отношения другого зубчатого ряда на этой же полуоси и зубчатого ряда связи конца другого вала с другой полуосью (авт. св. СССР N 1191321 по М. кл. B 60 K 17/20, 17/32, 1985).
Недостатком этого механизма является то, что при использовании его для блокировки межосевого дифференциала не обеспечивается ограничение буксования колес ведущих мостов предельно допустимой величиной. Во-первых, потому, что передаточные отношения зубчатых рядов, связанных между собой сочлененными посредством обгонной муфты валами, не имеют тех оптимальных значений, которые обеспечили бы автоматическую блокировку дифференциала в момент, когда буксование колес одного из ведущих мостов достигнет предельно допустимой величины. И во-вторых, потому, что при увеличении буксования колес одного из ведущих мостов, когда при превышении частоты вращения одной полуоси дифференциала над частотой вращения другой полуоси более допустимой величины наступит блокировка обгонной муфты, сочленяющей один вал, связанный другим концом с большой шестерней, с другим валом, связанным другим концом с малой шестерней, произойдет разблокировка обгонной муфты, установленной на отстающей полуоси и связанной с шестерней, размешенной на этой же полуоси и образующей с упомянутой малой шестерней зубчатый ряд. В результате скорость движения и производительность транспортного средства будут снижаться.
Известен механизм блокировки дифференциала транспортного средства, содержащий планетарную передачу, два звена которой посредством зубчатых рядов постоянного зацепления связаны с соответствующими выходными звеньями дифференциала транспортного средства, а третье звено связано с одним из двух взаимнопроворачивающихся элементов блокирующего устройства, представляющего собой гидро- или электромашину, второй из упомянутых элементов которого закреплен на корпусе транспортного средства (авт. св. СССР N 1043042, по М. кл. B 60 K 17/20, 1983).
Недостатком этого механизма является то, что при использовании его для блокировки межосевого дифференциала будет иметь место дополнительная потеря энергии на преодоление тормозного момента в блокирующем устройстве, возникающего при любой, самой малой разнице в величинах угловых скоростей выходных звеньев дифференциала. В результате будет снижаться коэффициент полезного действия транспортного средства. Кроме того, механизм блокировки не обеспечивает ограничение буксования колес ведущих мостов предельно допустимой величиной, потому что при данной конструкции механизма не достигается блокировка дифференциала со строго фиксированным передаточным отношением между корпусом дифференциала и его выходным звеном, связанным с ведущим мостом, колеса которого имеют хорошее сцепление с дорогой. В результате будет наблюдаться потеря скорости движения и производительности транспортного средства.
Известен механизм блокировки дифференциала транспортного средства, принятый в качестве прототипа, содержащий два зубчатых ряда постоянного зацепления, ведущие шестерни которых связаны с соответствующими полуосями транспортного средства, а ведомые установлены на валу и связаны с ведущими элементами управляемых реверсивных обгонных муфт, расположенных на последнем, третий зубчатый ряд постоянного зацепления, ведущая шестерня которого связана с венцом ведомой шестерни главной передачи, а ведомая установлена на упомянутом валу и связана с элементом управления в виде втулки с выступами на торцах для взаимодействия с телами качения обгонных муфт (авт. св. СССР N 846329 по М. кл. B 60 K 17/20, 1981).
Недостатком этого механизма является то, что при использовании его для блокировки межосевого дифференциала передаточные отношения зубчатых рядов, ведущие шестерни которых связаны с выходными звеньями дифференциала, не имеют тех оптимальных значений, которые обеспечили бы автоматическую блокировку дифференциала в момент, когда буксование колес одного из ведущих мостов достигает предельно допустимой величины. В результате скорость движения и производительность транспортного средства будут снижаться. Кроме того, данный механизм позволяет получать только кратковременную блокировку полуосей, которая будет сопровождаться ударными динамическими нагрузками, возникающими при соединении данным механизмом выходных звеньев дифференциала, вращающихся с разными угловыми скоростями. После кратковременной блокировки следует разблокирование, но если причина повышенного буксования колес одного из ведущих мостов сохраняется, кратковременная блокировка с ударными динамическими нагрузками будет повторяться многократно. Это будет снижать надежность и долговечность узлов транспортного средства. Недостатком данного механизма является также то, что не обеспечивается принудительное отключение его от дифференциала, поэтому при движении транспортного средства по неровному пути возможна блокировка дифференциала механизмом. Это будет сопровождаться возникновением паразитной циркулирующей мощности между ведущими мостами, дополнительно нагружающей ходовую систему, трансмиссию и повышающей износ шин.
Задача изобретения создание механизма блокировки дифференциала транспортного средства, обеспечивающего снижение буксования колес и динамических нагрузок.
Технический результат повышение производительности, надежности и срока службы.
Указанный технический результат достигается тем, что в варианте по п. 1 механизма блокировки дифференциала транспортного средства, содержащего два зубчатых ряда постоянного зацепления, ведущие шестерни которых связаны с соответствующими выходными звеньями дифференциала, а ведомые установлены на валу, третий зубчатый ряд постоянного зацепления, ведущая шестерня которого связана с венцом ведомой шестерни зубчатой передачи, для подвода ведущего момента к дифференциалу, а ведомая установлена на упомянутом валу, и две реверсивные обгонные муфты, расположенные на последнем, вал выполнен из двух соосно расположенных полувалов, сочлененных трехзвенным дифференциальным механизмом, первое звено которого связано с ведущим элементом одной упомянутой обгонной муфты, ведомый элемент которой соединен с ведомой шестерней третьего зубчатого ряда, и связано с ведомым элементом другой упомянутой обгонной муфты, ведущий элемент которой соединен с ведомой шестерней дополнительного зубчатого ряда постоянного зацепления, ведущая шестерня которого связана с упомянутым венцом, второе звено соединено с одним полувалом, связанным с ведомой шестерней зубчатого ряда из двух упомянутых первыми, посредством которого этот полувал связан с первым выходным звеном дифференциала транспортного средства, а третье звено соединено с другим полувалом, связанным с ведомой шестерней другого зубчатого ряда из двух упомянутых первыми, посредством которого этот полувал связан со вторым выходным звеном дифференциала, причем два зубчатых ряда, упомянутых первыми, выполнены с передаточными отношениями, равными между собой, зубчатый ряд, ведомая шестерня которого связана с ведомым элементом одной обгонной муфты, выполнен с передаточным отношением, которое меньше передаточного отношения двух зубчатых рядов, упомянутых первыми, а зубчатый ряд, ведомая шестерня которого связана с ведущим элементом другой обгонной муфты, выполнен с передаточным отношением, которое больше передаточного отношения двух зубчатых рядов, упомянутых первыми. При этом связь одного из полувалов с ведомой шестерней соответствующего зубчатого ряда из двух упомянутых первыми выполнена посредством фрикционной муфты, зубчатый ряд, ведомая шестерня которого связана с ведомым элементом одной обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью:
а другой зубчатый ряд, ведомая шестерня которого связана с ведущим элементом другой обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью:
где i1 и i2 передаточные отношения зубчатых рядов, связывающих упомянутый венец, соответственно, с ведомым элементом одной обгонной муфты и ведущим элементом другой обгонной муфты
i передаточное отношение двух зубчатых рядов, ведущие шестерни которых связаны, соответственно, с первым и вторым выходными звеньями дифференциала 
ω1, ω2, ω3, ω4 угловые скорости ведомых шестерен, связанных, соответственно, с ведомым элементом одной обгонной муфты, ведущим элементом другой обгонной муфты, полувалом, соединенным со вторым звеном дифференциального механизма, и полувалом, соединенным с третьим звеном последнего;
ωд угловая скорость упомянутого венца;
ωa угловая скорость первого выходного звена дифференциала транспортного средства, соединенного с полуосевой шестерней последнего, диаметр которой, по крайней мере, не больше диаметра его другой полуосевой шестерни;
ωв угловая скорость второго выходного звена дифференциала, соединенного с другой полуосевой шестерней последнего;
iд передаточное число дифференциала транспортного средства;
T1, T2 расчетные параметры, выражаемые следующими зависимостями:
если первым звеном дифференциального механизма является водило;
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило;
S расчетный параметр, выражаемый следующими зависимостями:
S = iдм, если выполняется одно из следующих условий:
1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
2) когда вторым звеном дифференциального механизма является водило, третьим звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S = 1/iдм, если ни одно из этих условий не выполняется;
iдм передаточное число ж дифференциального механизма;
V расчетный параметр, выражаемый следующими зависимостями; если выполняется одно из следующих условий:
если выполняется одно из следующих условий:
1) когда первым звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, и при этом должно соблюдаться неравенство:iдм > iд;
2) третьим звеном дифференциального механизма является водило; если ни одно из этих условий не выполняется;
если ни одно из этих условий не выполняется;
б0 буксование колес при наиболее вероятной тяговой нагрузке транспортного средства на типичном поверхностном фоне;
бдоп задаваемое предельно допустимое буксование колес.
Указанный технический результат достигается тем, что в варианте по п. 4 механизма блокировки дифференциала транспортного средства, содержащего два зубчатых ряда постоянного зацепления, ведущие шестерни которых связаны с соответствующими выходными звеньями дифференциала, а ведомые установлены на валу, третий зубчатый ряд постоянного зацепления, ведущая шестерня которого связана с венцом ведомой шестерни зубчатой передачи для подвода ведущего момента к дифференциалу, а ведомая уставлена на упомянутом валу, и две реверсивные обгонные муфты, расположенные на последнем, ведомый элемент одной из которых связан с упомянутым валом, а ведущий с ведомой шестерней одного из двух упомянутых первыми зубчатых рядов, вал выполнен из двух соосно расположенных полувалов, с одним из которых связаны обе упомянутые обгонные муфты, ведомый элемент другой из которых соединен с ведомой шестерней дополнительного зубчатого ряда постоянного зацепления, ведущая шестерня которого связана с тем выходным эвеном дифференциала, с которым посредством соответствующего зубчатого ряда из двух упомянутых первыми связана первая обгонная муфта, соединенных трехзвенным дифференциальным механизмом, первое звено которого соединено с тем полувалом, который связан с обеими обгонными муфтами, второе звено соединено с другим полувалом, связанным с ведомой шестерней другого зубчатого ряда из двух упомянутых первыми, а третье звено соединено с ведомой шестерней третьего зубчатого ряда, причем зубчатые ряды выполнены с передаточным отношением двух из них, ведомые шестерни которых связаны соответственно с третьим звеном дифференциального механизма и полувалом, соединенным со вторым звеном последнего, равным между собой, но меньше передаточного отношения зубчатого ряда, ведомая шестерня которого связана с ведущим элементом одной обгонной муфты, и больше передаточного отношения зубчатого ряда, ведомая шестерня которого связана с ведомым элементом другой обгонной муфты. При этом связь полувала, соединенного со вторым звеном дифференциального механизма, с ведомой шестерней другого зубчатого ряда из двух упомянутых первыми выполнена посредством фрикционной муфты, зубчатый ряд, ведомая шестерня которого связана с ведущим элементом одной обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью:
i1 iT1
а зубчатый ряд, ведомая шестерня которого связана с ведомым элементом другой обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью:
i2 iT2
где
i1 и i2 передаточные отношения зубчатых рядов, ведомые шестерни которых связаны соответственно с ведущим элементом одной и ведомым элементом другой упомянутых обгонных муфт
i передаточное отношение двух зубчатых рядов, ведомые шестерни которых связаны соответственно с третьим звеном дифференциального механизма и с полувалом, соединенным со вторым звеном последнего 
ωa угловая скорость первого выходного звена дифференциала транспортного средства, с которым кинематически связаны обе обгонные муфты;
ωв угловая скорость второго выходного звена дифференциала транспортного средства;
ω1, ω2, ω3, ω4 угловые скорости ведомых шестерен зубчатых рядов, соответственно связанных с ведущим элементом одной обгонной муфты, ведомым элементом другой обгонной муфты, третьим звеном дифференциального механизма и полувалом, соединенным со вторым звеном последнего;
ωд угловая скорость упомянутого венца;
T1, T2 расчетные параметры, которые в случае связи с дифференциалом транспортного средства его первого выходного звена по первому варианту, при котором это звено соединено с той полуосевой шестерней дифференциала, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни, определяются из выражений:
если первым звеном дифференциального механизма является водило;
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило, а в случае связи с дифференциалом его первого выходного звена по второму варианту, при котором последнее соединено с другой полуосевой шестерней дифференциала, находятся из выражений:
если первым звеном дифференциального механизма является водило,
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило;
где iд передаточное число дифференциала транспортного средства;
S расчетный параметр, выражаемый следующими зависимостями:
S iдм, если выполняется одно из следующих условий:
1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
2) когда вторым звеном дифференциального механизма является водило, третьим звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S 1/iдм, если ни одно из этих условий не выполняется;
iдм передаточное число дифференциального механизма;
V расчетный параметр, выраженный следующими зависимостями: если выполняется одно из следующих условий:
если выполняется одно из следующих условий:
1) когда первым или вторым звеном дифференциального механизма является водило, связь с дифференциалом транспортного средства его первого выходного звена должна быть по первому варианту;
2) когда третьим звеном дифференциального механизма является водило, должно соблюдаться неравенство: iдм> iд и при связи с дифференциалом транспортного средства его первого выходного звена по первому варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой больше диаметра другой полуосевой шестерни, а при вышеупомянутой связи по второму варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни этого дифференциального механизма; если ни одного из этих условий не выполняется:
если ни одного из этих условий не выполняется:
где б0 буксование колес при наиболее вероятной тяговой нагрузке транспортного средства на типичном поверхностном фоне;
бдоп задаваемое предельно допустимое буксование колес
Выполнение в варианте по п. 1 вала из двух полувалов обеспечивает последним возможность вращаться с не равными друг другу скоростями, а соосное их расположение позволяет сочленить их трехзвенным дифференциальным механизмом. Сочленение полувалов трехзвенным дифференциальным механизмом, второе звено которого соединено с одним полувалом, а третье звено соединено с другим полувалом, позволяет при появлении разности между скоростями вращения полувалов получать изменение скорости вращения первого звена дифференциального механизма зависимое от упомянутой разности угловых скоростей.
Связь в варианте по п. 1 одного полувала с ведомой шестерней зубчатого ряда из двух упомянутых первыми, посредством которого этот полувал связан с первым выходным звеном дифференциала транспортного средства, обеспечивает вращение данного полувала, кинематически согласованное с вращением первого выходного звена. Связь другого полувала с ведомой шестерней другого зубчатого ряда из двух упомянутых первыми, посредством которого этот полувал связан со вторым выходным звеном дифференциала, обеспечивает вращение данного полувала, кинематически согласованное с вращением второго выходного звена.
Связь в варианте по п. 1 первого звена дифференциального механизма с ведущим элементом одной упомянутой обгонной муфты и соединение ее ведомого элемента с ведомой шестерней третьего зубчатого ряда обеспечивают этой муфты совместно с вращением первого звена и вращение ведомого элемента, кинематически согласованное с вращением венца.
Связь в варианте по п. 1 первого звена дифференциального механизма с ведомым элементом другой упомянутой обгонной муфты, соединение ее ведущего элемента с ведомой шестерней дополнительного зубчатого ряда постоянного зацепления и связь ведущей шестерни последнего с упомянутым венцом обеспечивает вращение ведомого элемента другой обгонной муфты совместно с первым звеном и вращение ведущего элемента, кинематически согласованное с вращением венца.
Выполнение в варианте по п. 1 двух упомянутых первыми зубчатых рядов с передаточными отношениями, равными между собой, зубчатого ряда, ведомая шестерня которого связана с ведомым элементом одной обгонной муфты, с передаточным отношением, которое меньше, а зубчатого ряда, ведомая шестерня которого связана с ведущим элементом другой обгонной муфты, с передаточным отношением, которое больше передаточного отношения двух зубчатых рядов, упомянутых первыми, обеспечивает в режиме автоматической блокировки разблокированное состояние дифференциала транспортного средства, по крайней мере, при равных между собой угловых скоростях его выходных звеньев.
Связь в варианте по п. 1 одного из полувалов с ведомой шестерней соответствующего зубчатого ряда из двух упомянутых первыми посредством фрикционной муфты позволяет при включенной муфте обеспечивать режим автоматической блокировки дифференциала, при котором этот полувал получает вращение, кинематически согласованное с вращением соответствующего выходного звена, а при выключенной муфте получать режим разблокировки.
Выполнение в варианте по п. 1 зубчатого ряда, ведомая шестерня которого связана с ведомым элементом одной обгонной муфты, с передаточным отношением, выраженным зависимостью:
а другого зубчатого ряда, ведомая шестерня которого связана с ведущим элементом другой обгонной муфты, с передаточным отношением, выраженным зависимостью:
обеспечивает автоматическую блокировку дифференциала в момент, когда буксование колес одного из ведущих мостов достигает предельно допустимой величины. На весь период времени, пока не устранена причина повышенного буксования колес одного из ведущих мостов, в результате автоматической блокировки соответствующей обгонной муфты между упомянутыми венцом и первым звеном трехзвенного дифференциального механизма включается передача с постоянным передаточным отношением, в результате чего дифференциальный механизм превращается в зубчатую передачу с постоянным передаточным отношением, связывающую выходные звенья дифференциала между собой посредством полувалов и упомянутых первыми двух зубчатых рядов.
Выполнение в варианте по п. 4 вала из двух соосно расположенных полувалов, сочлененных трехзвенным дифференциальным механизмом, первое звено которого соединено с тем полувалом, который связан с обеими обгонными муфтами, второе звено соединено с другим полувалом, а третье звено соединено с ведомой шестерней третьего зубчатого ряда, обеспечивает вращение полувала, с которым связаны обе обгонные муфты, кинематически согласованное с вращением другого полувала, но со скоростью, отличной от скорости последнего, что позволяет путем изменения передаточного числа дифференциального механизма еще на стадии проектирования влиять на плавность блокировки обгонных муфт, а следовательно, и на плавность работы механизма блокировки.
Связь в варианте по п. 4 обеих упомянутых обгонных муфт с одним полувалом, ведомый элемент другой из которых соединен с ведомой шестерней дополнительного зубчатого ряда постоянного зацепления, ведущая шестерня которого связана с тем выходным звеном дифференциала, с которым посредством соответствующего зубчатого ряда из двух упомянутых первыми связана первая обгонная муфта, обеспечивает блокировку соответствующей обгонной муфты, а следовательно, и блокировку дифференциала как при ускорении упомянутого выходного звена, вызванном повышенным буксованием колес ведущего моста, кинематически связанного с этим звеном, так и при его замедлении, обусловленном повышенным буксованием колес ведущего моста, кинематически связанного с другим выходным звеном.
Выполнение в варианте по п. 4 зубчатых рядов таким образом, что передаточные отношения двух из них, ведомые шестерни которых связаны соответственно с третьим звеном дифференциального механизма и полувалом, соединенным со вторым звеном последнего, равны между собой, но меньше передаточного отношения зубчатого ряда, ведомая шестерня которого связана с ведущим элементом одной обгонной муфты, и больше передаточного отношения зубчатого ряда, ведомая шестерня которого связана с ведомым элементом другой обгонной муфты, обеспечивает в режиме автоматической блокировки разблокированное состояние дифференциала транспортного средства, по крайней мере, при равных между собой угловых скоростях его выходных звеньев.
Связь в варианте по п. 4 другого полувала с ведомой шестерней другого зубчатого ряда из двух упомянутых первыми обеспечивает этому полувалу вращение, кинематически согласованное с вращением другого выходного звена дифференциала транспортного средства. Выполнение этой связи посредством фрикционной муфты позволяет при включенной муфте обеспечивать режим автоматической блокировки дифференциала, а при выключенной муфте получать режим разблокировки.
Выполнение в варианте по п. 4 зубчатого ряда, ведомая шестерня которого связана с ведущим элементом одной обгонной муфты, с передаточным отношением, выраженным зависимостью:
i1 iT1
а другого зубчатого ряда, ведомая шестерня которого связана с ведомым элементом другой обгонной муфты, с передаточным отношением, выраженным зависимостью:
i2 iT2
обеспечивает автоматическую блокировку дифференциала в момент, когда буксование колес одного из ведущих мостов достигает предельно допустимой величины. На весь период времени, пока не устранена причина повышенного буксования колес одного из ведущих мостов, в результате автоматической блокировки соответствующей муфты между выходными звеньями дифференциала транспортного средства включается передача с постоянным передаточным отношением, состоящая из последовательно соединенных зубчатого ряда, ведомая шестерня которого связана с заблокированной на данный момент обгонной муфтой, а ведущая с первым выходным звеном дифференциала, дифференциального механизма и зубчатого ряда, ведущая шестерня которого связана со вторым выходным звеном дифференциала.
Достигаемое в обоих описанных вариантах ограничение буксования колес способствует повышению производительности транспортного средства, а обеспечение постоянной на весь период повышенного буксования колес одного из ведущих мостов блокировки дифференциала улучшает плавность работы механизма блокировки, что способствует повышению надежности и срока службы узлов транспортного средства.
Вышеприведенные зависимости в варианте по п. 1 получены следующим образом.
В режиме автоматической блокировки дифференциала состояние его разблокировки выполняется при следующем неравенстве угловых скоростей:
ω1 > ωx > ω2 (1)
где ωx угловая скорость первого звена дифференциального механизма.
Условием наступления блокировки одной или другой обгонных муфт, а следовательно, и блокировки дифференциала является выполнение одного из равенств:
Выразим угловые скорости ω1 и ω2 ведомых шестерен зубчатых рядов, связывающих упомянутый венец с соответствующими элементами обгонных муфт, через угловую скорость ωд этого венца:
Выразим угловые скорости второго и третьего звеньев дифференциального механизма через угловые скорости ωa и ωв соответственно первого и второго выходных звеньев дифференциала транспортного средства (при включенной фрикционной муфте)
где ωy и ωz угловые скорости соответственно второго и третьего звеньев дифференциального механизма.
Для записи уравнения кинематической зависимости упомянутых выходных звеньев и венца, соединенного с водилом дифференциала транспортного средства, воспользуемся известным уравнением кинематической зависимости элементов планетарного ряда со смешанным зацеплением (И.Б. Барский. Конструирование и расчет тракторов. М: Машиностроение, 1980, с. 94 ), после преобразования которого получим:
ωa - (1+iд)ωo+iдωв = 0 (8)
Поскольку в литературе (В.В.Гуськов. Тракторы. Часть 2. Теория. Минск, 1977, с. 82-83 ) принято для характеристики степени несимметричности дифференциала использовать передаточное число дифференциала, в уравнении (8) вместо характеристики планетарного ряда использовано численно равное ей передаточное число дифференциала iд.
Запишем уравнения связи угловых скоростей выходных звеньев дифференциала для случая использования его в качестве межосевого через равенство действительных скоростей ведущих мостов при движении транспортного средства по ровной поверхности и предельно допустимом буксовании колес одного из мостов. Допускаем при этом, что возможное неравенство радиусов качения колес ведущих мостов скомпенсировано соответствующим изменением передаточных отношений приводов этих колес. В таком случае будем иметь:
ωa(1-бдоп) = ωв(1-бo), (9)
если предельно допустимого буксования достигли колеса ведущего моста, кинематически связанного с выходным звеном дифференциала, имеющим угловую скорость:
ωa(1-бo) = ωв(1-бдоп), (10)
если предельно допустимого буксования достигли колеса ведущего моста, кинематически связанного с выходным звеном дифференциала, имеющим угловую скорость ωв.
Для записи уравнения кинематической зависимости звеньев трехзвенного дифференциального механизма воспользуемся уже упоминавшимся выше уравнением кинематической зависимости элементов планетарного ряда со смешанным зацеплением. В случае, когда первым звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωz-(1+S)ωx+Sωy = 0, (11)
где S расчетный параметр, определяемый по формулам:
S iдм, если диаметр полуосевой шестерни, являющейся вторым звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S I/iдм, если данное условие не выполняется.
В случае, когда вторым звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωx-(1+S)ωy+Sωz = 0, (12)
где S iдм, если диаметр полуосевой шестерни, являющейся третьим звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S I/iдм, если данное условие не выполняется.
В случае, когда третьим звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωx-(1+S)ωz+Sωy = 0, (13)
где S iдм, если диаметр полуосевой шестерни, являющейся вторым звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S I/iдм, если данное условие не выполняется.
Введение параметра S делает вид уравнений (11), (12), (13) не зависящим от соотношения диаметров полуосевых шестерен дифференциального механизма.
Рассмотрим случай предельно допустимого буксования колес одного из ведущих мостов, соответствующей уравнению (9).
Выразив величину ωв из уравнения (9):
и подставив в уравнение (8), получим
Величину ωв, найденную из уравнения (14), подставим в выражение (7), в результате будем иметь:
Для случая, когда первым звеном дифференциального механизма является водило, подставим величину ωy определенную из выражения (6), и величину ωz найденную из уравнения (16), в уравнение (11) и, решив его относительно величины ωx будем иметь:
Для случая, когда вторым звеном дифференциального механизма является водило, подставим величины ωy и ωz определенные из вышеприведенных выражений, в уравнение (12) и, решив его относительно величины ωx будем иметь:
Для случая, когда третьим звеном дифференциального механизма является водило, подставим величины ωy и ωz, определенные выше, в уравнение (13) и, решив его относительно величины ωx будем иметь:
Рассмотрим случай предельно допустимого буксования колес одного из ведущих мостов, соответствующий уравнению (10).
Выразив величину ωв из уравнения (10):
и подставив в уравнение (8), получим:
Величину ωв, найденную из уравнения (20), подставим в выражение (7), в результате будем иметь:
Для случая, когда первым звеном дифференциального механизма является водило, подставим величину ωy определенную из выражения (6), и величину ωz, найденную из уравнения (22), в уравнение (11) и, решив его относительно величины ωx, будем иметь:
Для случая, когда вторым звеном дифференциального механизма является водило, подставим величины ωy и ωz, определенные из вышеприведенных выражений, в уравнение (12) и, решив его относительно величины ωx, будем иметь:
Для случая, когда третьим звеном дифференциального механизма является водило, подставим величины ωy и ωz, определенные выше, в уравнение (13) и, решив его относительно величины ωx, будем иметь:
Блокировка соответствующей обгонной муфты наступит, когда выполнится равенство (2) или равенство (3).
Анализ кинематики предлагаемого механизма блокировки показывает, что в случае достижения предельно допустимого буксования колесами ведущего моста, кинематически связанного с первым выходным звеном дифференциала транспортного средства, выполнение равенства (2) или равенства (3) зависит от соблюдения одного из следующих условий:
1) когда водило дифференциального механизма является его первым звеном, то, если вторым звеном является полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни, или вторым звеном является полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, но и последнем случае соблюдается неравенство: iдм < iд, выполнится равенство (2), а если в последнем случае имеет место неравенство: iдм > iд, выполнится равенство (3);
2) если водило дифференциального механизма является его вторым звеном, выполнится равенство (2), а если третьим звеном, выполнится равенство (3).
В случае достижения предельно допустимого буксования колесами ведущего моста, кинематически связанного со вторым выходным звеном дифференциала транспортного средства, выполнение равенства (2) или равенства (3) зависит от соблюдения одного из следующих условий:
1) когда водило дифференциального механизма является его первым звеном, то, если вторым звеном является полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни, или вторым звеном является полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, но в последнем случае соблюдается неравенство: iдм < iд, выполнится равенство (3), а если в последнем случае имеет место неравенство: iдм > iд, выполнится равенство (2);
2) если водило дифференциального механизма является его вторым звеном, выполнится равенство (3), а если третьим звеном, выполнится равенство (2).
Следует заметить, что когда водило дифференциального механизма является его первым звеном, чтобы блокировка дифференциала состоялась и процесс ее срабатывания не затягивался во времени при повышении буксования колес одного из ведущих мостов, величины iд и iдм не должны быть близкими по значению.
Рассмотрим случаи выполнения равенства (2) или равенства (3), когда предельно допустимого буксования достигают колеса ведущего моста, кинематически связанного с первым выходным звеном дифференциала транспортного средства, при соблюдении одного из вышеприведенных соответствующих условий.
В соответствии с первым условием выполнения равенства (2), приравняв правые части к уравнений (4) и (17) с учетом выражения (15), получим:
Согласно первому условию выполнения равенства (3) приравняем правые части уравнений (5) и (17) с учетом выражения (15) и будем иметь:
В соответствии со вторым условием выполнения равенства (2), приравняв правые части уравнений (4) и (18) с учетом выражения (15), получим:
Согласно второму условию выполнения равенства (3) приравняем правые части уравнений (5) и (19) с учетом выражения (15) и будем иметь:
Рассмотрим случаи выполнения равенства (2) или равенства (3), когда предельно допустимого буксования достигают колеса ведущего моста, кинематически связанного со вторым выходным звеном дифференциала транспортного средства, при соблюдении одного из вышеприведенных соответствующих условий.
В соответствии с первым условием выполнения равенства (2), приняв правые части уравнений (4) и (23) с учетом выражения (21), получим:
Согласно первому условию выполнения равенства (3), приравняв правые части уравнений (5) и (23) с учетом выражения (21), будем иметь:
В соответствии со вторым условием выполнения равенства (2), приравняв правые части уравнений (4) и (25) с учетом выражения (21), получим:
Согласно второму условию выполнения равенства (3), приравняем правые части уравнений (5) и (24) с учетом выражения (21) и будем иметь:
Для обобщения выражений (26).(33) введем следующие расчетные параметры.
T1 и T2 расчетные параметры, определяемые из выражений:
если первым звеном дифференциального механизма является водило;
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило;
S расчетный параметр, выражаемый следующими зависимостями:
S iдм, если выполняется одно из следующих условий:
1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
2) когда вторым звеном дифференциального механизма является водило, третьим звеном должно быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S I/iдм, если ни одно из этих условий не выполняется;
V расчетный параметр, выражаемый следующими зависимостями:
если выполняется одно из следующих условий:
1) когда первым звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, и при этом должно соблюдаться неравенство: iдм > iд;
2) третьим звеном дифференциального механизма является водило;
если ни одно из этих условий не выполняется.
Тогда можно записать:
Вышеприведенные зависимости в варианте по п. 4 получены следующим образом.
В режиме автоматической блокировки дифференциала состояние его разблокировки выполняется при следующем неравенстве угловых скоростей:
ω1 < ωx < ω2 (39)
где ωx угловая скорость первого звена дифференциального механизма.
Условием наступления блокировки одной или другой обгонных муфт, а следовательно, и блокировки дифференциала является выполнение одного из равенств:
Выразим угловые скорости ω1 и ω2 ведомых шестерен зубчатых рядов, связывающих первое выходное звено дифференциала транспортного средства с соответствующими элементами обгонных муфт, через угловую скорость ωa этого звена:
Выразим угловую скорость второго звена дифференциального механизма через угловую скорость ωв второго выходного звена дифференциала транспортного средства (при включенной фрикционной муфте):
ωy = ω4 = ωв/i, (44)
где ωy угловая скорость второго звена дифференциального механизма.
Выразим угловую скорость третьего звена дифференциального механизма через угловую скорость ωд венца:
ωz = ω3 = ωд/i, (45)
где ωz угловая скорость третьего звена дифференциального механизма.
Для записи уравнения кинематической зависимости полуосевых шестерен дифференциала транспортного средства и венца, соединенного с водилом последнего, воспользуемся уже упоминавшимся выше уравнением кинематической зависимости элементов планетарного ряда со смешанным зацеплением, после преобразования которого получим:
ωc-(1+iд)ωд+iдωк=0, (46)
где ωc угловая скорость полуосевой шестерни дифференциала транспортного средства, диаметр которой, по крайней мере, не больше диаметра его другой полуосевой шестерни;
ωк угловая скорость другой полуосевой шестерни дифференциала.
По причине, приведенной выше, в уравнении (46) вместо характеристики планетарного ряда использовано численно равное ей передаточное число дифференциала iд.
Запишем уравнения связи угловых скоростей полуосевых шестерен дифференциала транспортного средства для случая использования его в качестве межосевого через равенство действительных скоростей ведущих мостов при движении транспортного средства по ровной поверхности и предельно допустимом буксовании колес одного из мостов. Допускаем при этом, что возможное неравенство радиусов качения колес ведущих мостов скомпенсировано соответствующим изменением передаточных отношений приводов этих колес.
В таком случае будем иметь:
ωc(1-бдоп)=ωк(1-бo), (47)
если предельно допустимого буксования достигли колеса ведущего моста, кинематически связанного с полуосевой шестерней дифференциала транспортного средства, имеющей угловую скорость ωc,
ωc(1-бo)=ωк(1-бдоп), (48)
если предельно допустимого буксования достигли колеса ведущего моста, кинематически связанного с полуосевой шестерней дифференциала, имеющей угловую скорость ωк.
Для записи уравнения кинематической зависимости звеньев трехзвенного дифференциального механизма воспользуемся уже упоминавшимся выше уравнением кинематической зависимости элементов планетарного ряда со смешанным зацеплением.
В случае, когда первым звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωz-(1+S)ωx+Sωy=0, (49)
где S расчетный параметр, выражаемый следующими зависимостями:
S iдм, если диаметр полуосевой шестерни, являющей вторым звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S 1/iдм, если данное условие не выполняется.
В случае, когда вторым звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωx-(1+S)ωy+Sωz=0, (50)
где S iдм, если диаметр полуосевой шестерни, являющейся третьим звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S 1/iдм, если данное условие не выполняется.
В случае, когда третьим звеном дифференциального механизма является водило, уравнение после преобразования будет иметь вид:
ωx-(1+S)ωz+Sωy=0, (51)
где S iдм, если диаметр полуосевой шестерни, являющейся вторым звеном дифференциального механизма, по крайней мере, не меньше диаметра другой полуосевой шестерни;
S 1/iдм, если данное условие не выполняется.
Рассмотрим случай предельно допустимого буксования колес одного из ведущих мостов, соответствующий уравнению (47).
Выразив величину ωк из уравнений (47):
и подставив в уравнение (46), получим:
Найденную из выражения (53) величину ωд подставим в уравнение (45), после чего будем иметь:
Если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту, будут иметь место следующие равенства:
а если по второму варианту, равенства будут выглядеть так:
Подставив в выражение (44) величину ωв, найденную из уравнения (56), получим:
ωy = ωc/i (59)
а подставив в выражение (44) величину ωв, найденную из уравнения (58) с учетом выражения (52), будем иметь:
Для случая, когда первым звеном дифференциального механизма является водило, подставим в уравнение (49) величины ωy и ωz, найденные соответственно из выражений (59) и (54), и решив его относительно величины ωx, получим:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту.
Подставив же в уравнение (49) величины ωy и ωz, найденные соответственно из выражений (60) и (54), и решив его относительно величины ωx, будем иметь:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Для случая, когда вторым звеном дифференциального механизма является водило, подставим в уравнение (50) величины ωy и ωz, найденные соответственно из выражений (59) и (54), и решив его относительно величины ωx, получим:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту.
Подставив же в уравнение (50) величины ωy и ωz, найденные соответственно из выражений (60) и (54), и решив его относительно величины ωx, будем иметь:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Для случая, когда третьим звеном дифференциального механизма является водило, подставим в уравнение (51) величины ωy и ωz, найденные соответственно из выражений (59) и (54), и решив его относительно величины ωx, получим:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту.
Подставив же в уравнение (51) величины ωy и ωz, найденные соответственно из выражений (60) и (54), и решив его относительно величины ωx, будем иметь:
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Рассмотрим случай предельно допустимого буксования колес одного из ведущих мостов, соответствующий уравнению (48).
Выразив величину ωк из уравнения (48):
и подставив в уравнение (46), получим:
Найденную из выражения (68) величину ωд подставим в уравнение (45), после чего будем иметь:
Подставив в выражение (44) величину ωв, найденную из уравнения (58) с учетом выражения (67), получим:
Проделав с величиной ωy, найденной из выражения (59) или выражения (70), и величиной ωz, найденной из выражения (69), те же действия, которые проводились при выводе уравнений (61).(66), будем иметь следующий ряд выражений.
Для случая, когда первым звеном дифференциального механизма является водило,
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту;
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Для случая, когда вторым звеном дифференциального механизма является водило,
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту;
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Для случая, когда третьим звеном дифференциального механизма является водило,
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по первому варианту;
если связь с дифференциалом транспортного средства его первого выходного звена выполнена по второму варианту.
Блокировка соответствующей обгонной муфты наступит, когда выполнится равенство (40) или равенство (41).
Анализ кинематики предлагаемого механизма блокировки показывает, что в случае достижения предельно допустимого буксования колесами ведущего моста, кинематически связанного с полуосевой шестерней дифференциала транспортного средства, диаметр которой по крайней мере не больше диаметра другой полуосевой шестерни, выполнение равенства (40) или равенства (41) зависит от соблюдения одного из следующих условий:
1) когда первым звеном дифференциального механизма является водило, то, если связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, выполнится равенство (40), а если по второму варианту, выполнится равенство (41);
2) когда вторым звеном дифференциального механизма является водило, то, если связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, выполнится равенство (40), а если по второму варианту, выполнится равенство (41);
3) когда третьим звеном дифференциального механизма является водило и связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, то, если первым звеном дифференциального механизма является полуосевая шестерня, диаметр которой больше диаметра другой полуосевой шестерни, и соблюдается неравенство: iдм > iд, выполнится равенство (40), если же эта полуосевая шестерня имеет диаметр, который, по крайней мере, не меньше диаметра другой полуосевой шестерни и при этом имеет место неравенство: iдм < iд или диаметр этой полуосевой шестерни меньше диаметра другой полуосевой шестерни, выполнится равенство (41);
4) когда третьим звеном дифференциального механизма является водило и связь с дифференциалом транспортного средства его первого выходного звена осуществлена по второму варианту, то, если первым звеном дифференциального механизма является полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, и соблюдается неравенство: iдм > iд, выполнится равенство (40), если же эта полуосевая шестерня имеет диаметр, который, по крайней мере, не больше диаметра другой полуосевой шестерни и при этом имеет место неравенство: iдм < iд, или диаметр этой полуосевой шестерни больше диаметра другой полуосевой шестерни, выполнится равенство (41).
В случае достижения предельно допустимого буксования колесами ведущего моста, кинематически связанного с полуосевой шестерней дифференциала транспортного средства, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни, выполнение равенства (40) или равенства (41) зависит от соблюдения одного из следующих условий:
1) когда первым звеном дифференциального механизма является водило, то, если связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, выполнится равенство (41), а если по второму варианту, выполнится равенство (40);
2) когда вторым звеном дифференциального механизма является водило, то, если связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, выполнится равенство (41), а если по второму варианту, выполнится равенство (40);
3) когда третьим звеном дифференциального механизма является водило и связь с дифференциалом транспортного средства его первого выходного звена осуществлена по первому варианту, то, если первым звеном дифференциального механизма является полуосевая шестерня, диаметр которой больше диаметра другой полуосевой шестерни, и соблюдается неравенство: iдм > iд, выполнится равенство (41), если же эта полуосевая шестерня имеет диаметр, который, по крайней мере, не меньше диаметра другой полуосевой шестерни и при этом имеет место неравенство: iдм < iд этой полуосевой шестерни меньше диаметра другой полуосевой шестерни, выполнится равенство (40);
4) когда третьим звеном дифференциального механизма является водило и связь с дифференциалом транспортного средства его первого выходного звена осуществлена по второму варианту, то, если первым звеном дифференциального механизма является полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни, и соблюдается неравенство: iдм > iд, выполнится равенство (41), если же эта полуосевая шестерня имеет диаметр, который, по крайней мере, не больше диаметра другой полуосевой шестерни и при этом имеет место неравенство: iдм < iд, или диаметр этой полуосевой шестерни больше диаметра другой полуосевой шестерни, выполнится равенство (40);
Следует заметить, что для того, чтобы блокировка дифференциала состоялась и процесс ее срабатывания не затягивался по времени при повышении буксования колес одного или другого ведущих мостов, величины iдм и iд не должны быть близкими по значению в следующих случаях:
1) когда третьим звеном дифференциального механизма является водило, а первым полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни, и связь дифференциала транспортного средства с его первым выходным звеном выполнена по первому варианту;
2) когда третьим звеном дифференциального механизма является водило, а первым полуосевая шестерня, диаметр которой, по крайней мере, не больше диаметра другой полуосевой шестерни, и связь дифференциала транспортного средства с его первым выходным звеном выполнена по второму варианту.
Рассмотрим случаи выполнения равенства (40) или равенства (41), когда предельно допустимого буксования достигают колеса ведущего моста, кинематически связанного с полуосевой шестерней дифференциала транспортного средства, диаметр которой, по крайней мере, не больше диаметра другой полуосевой шестерни при соблюдении одного из вышеприведенных соответствующих условий.
В соответствии с первым условием выполнения равенства (40), приравняв правые части уравнений (43) и (61) с учетом выражений (55) и (52), получим:
Согласно первому условию выполнения равенства (41) приравняем правые части уравнений (42) и (62) с учетом выражения (57) и будем иметь:
В соответствии со вторым условием выполнения равенства (40), приравняв правые части уравнений (43) и (63) с учетом выражений (55) и (52), получим:
Согласно второму условию выполнения равенства (41), приравняем правые части уравнений (42) и (64) с учетом выражения (77) и будем иметь:
В соответствии с третьим условием выполнения равенства (40), приравняв правые части уравнений (43) и (65) с учетом выражений (55) и (52), получим:
Согласно третьему условию выполнения равенства (41), приравняем правые части уравнений (42) и (65) с учетом выражений (55) и (52) и будем иметь:
В соответствии с четвертым условием выполнения равенства (40), приравняв правые части уравнений (43) и (66) с учетом выражения (57), получим
Согласно четвертому условию выполнения равенства (41), приравняем правые части уравнений (42) и (66) с учетом выражения (57) и будем иметь:
Рассмотрим случаи выполнения равенства (40) или равенства (41), когда предельно допустимого буксования достигают колеса ведущего моста, кинематически связанного с полуосевой шестерней дифференциала транспортного средства, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни при соблюдении одного из вышеприведенных соответствующих условий.
В соответствии с первым условием выполнения равенства (40), приравняв правые части уравнений (43) и (72) с учетом выражения (57), получим:
Согласно первому условию выполнения равенства (41), приравняем правые части уравнений (42) и (71) с учетом выражений (55) и (67) и будем иметь:
В соответствии со вторым условием выполнения равенства (40), приравняв правые части уравнений (43) и (74) с учетом выражения (57), получим:
Согласно второму условию выполнения равенства (41), приравняем правые части уравнений (42) и (73) с учетом выражений (55) и (67) и будем иметь:
В соответствии с третьим условием выполнения равенства (40), приравняв правые части уравнений (43) и (75) с учетом выражений (55) и (67), получим:
Согласно третьему условию выполнения равенства (41), приравняем правые части уравнений (42) и (75) с учетом выражений (55) и (67) и будем иметь:
В соответствии с четвертым условием выполнения равенства (40), приравняв правые части уравнений (43) и (76) с учетом выражения (57), получим:
Согласно четвертому условию выполнения равенства (41), приравняем правые части уравнений (42) и (76) с учетом выражения (57) и будем иметь:
Для обобщения выражений (78), (80), (82), (84), (86), (88), (90) и (92) введем расчетный параметр T1, а для обобщения выражений (77), (79), (81), (83), (85), (87), (89) и (91) расчетный параметр T2.
В случае связи с дифференциалом транспортного средства его первого выходного звена по первому варианту расчетные параметры T1 и T2 определяются из выражений: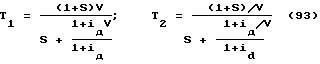
если первым звеном дифференциального механизма является водило;
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило, а в случае связи с дифференциалом транспортного средства его первого выходного звена по второму варианту расчетные параметры T1 и T2 найдутся из выражений:
если первым звеном дифференциального механизма является водило: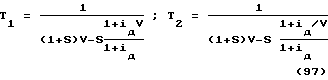
если вторым звеном дифференциального механизма является водило;
если третьим звеном дифференциального механизма является водило,
где S расчетный параметр, выражаемый следующими зависимостями:
S iдм, если выполняется одно из следующих условий:
1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
2) когда вторым звеном дифференциального механизма является водило, третьим звеном должна быть полуосевая шестерня, диаметр которой, по крайней мере, не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S 1/iдм, если ни одно из этих условий не выполняется;
V расчетный параметр, выражаемый следующими зависимостями: если выполняется одно из следующих условий:
если выполняется одно из следующих условий:
1) когда первым или вторым звеном дифференциального механизма является водило, связь с дифференциалом транспортного средства его первого выходного звена должна быть по первому варианту;
2) когда третьим звеном дифференциального механизма является водило, должно соблюдаться неравенство: iдм > iд, и при связи с дифференциалом транспортного средства его первого выходного звена по первому варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой больше диаметра другой полуосевой шестерни, а при вышеупомянутой связи по второму варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни этого дифференциального механизма; если ни одно из этих условий не выполняется
если ни одно из этих условий не выполняется
В результате можно записать:
i1 iT1; (99)
i2 iT2; (100)
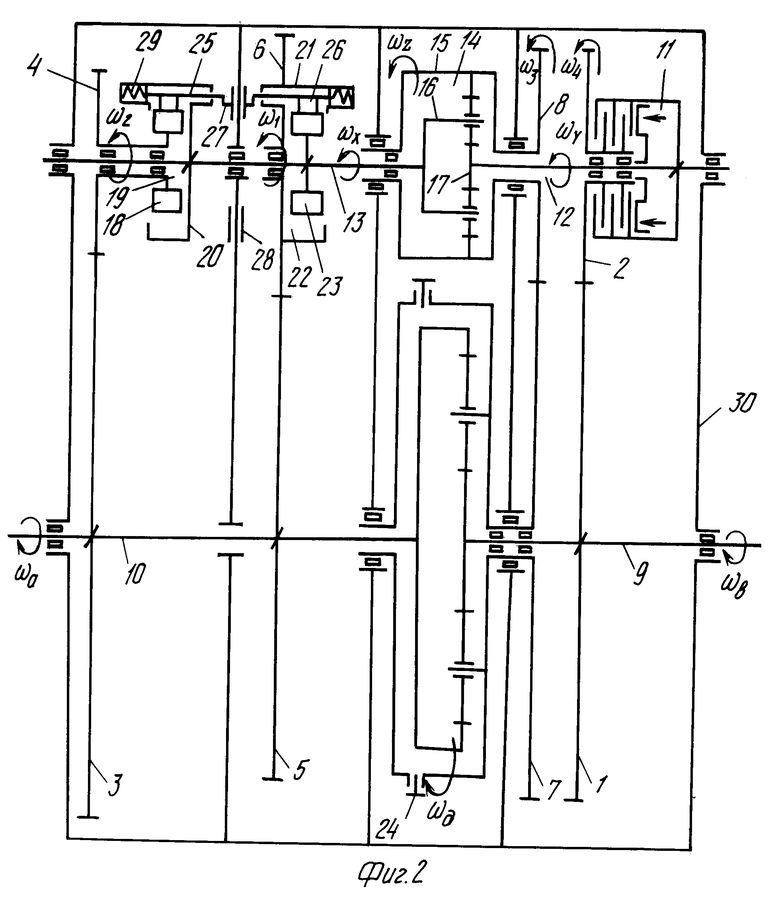
На фиг. 1 представлен первый вариант схемы механизма блокировки дифференциала транспортного средства; на фиг. 2 второй вариант схемы механизма блокировки дифференциала транспортного средства.
Механизм блокировки дифференциала (фиг. 1) связан с межосевым дифференциалом посредством четырех зубчатых пар, состоящих из зубчатых колес 1 и 2, 3 и 4, 5 и 6, 7 и 8. Зубчатые колеса 1 и 3 соединены соответственно с выходными звеньями 9 и 10 дифференциала, связанными с приводами, соответственно, переднего и заднего ведущих мостов (на чертеже не показаны). Зубчатое колесо 2 связано посредством фрикционной муфты 11 с полувалом 12, а зубчатое колесо 4 соединено с полувалом 13. Полувалы 12 и 13 сочленены трехзвенным дифференциальным механизмом, выполненным в виде планетарного ряда 14 со смешанным зацеплением, коронная шестерня 15 и водило 16 которого, являющиеся, соответственно, третьим и вторым звеньями дифференциального механизма, соединены со соответствующими полувалами 13 и 12, а солнечная шестерня 17, являющаяся первым звеном дифференциального механизма, связана с ведомым элементом 18 реверсивной обгонной муфты 19, ведущий элемент 20 которой соединен с зубчатым колесом 8, и с ведущим элементом 21 реверсивной обгонной муфты 22, ведомый элемент 23 которой соединен с зубчатым колесом 6. Зубчатые колеса 5 и 7 связаны с венцом 24 ведомой шестерни зубчатой передачи, подводящей ведущий момент к дифференциалу.
В качестве реверсивных обгонных муфт 19 и 22 используются известные обгонные храповые муфты двойного действия. Ведомый элемент в каждой муфте выполнен в виде храповика. В ведущем элементе каждой муфты установлена ось 25, на которой закреплена собачка 26 с двумя концами (на чертеже не показаны). Ось 25 имеет эксцентричный выступ 27 для взаимодействия с тормозной шайбой 28, к которой она постоянно поджимается пружиной 29, установленной в ведущем элементе каждой муфты. Тормозные шайбы 28 обеих муфт закреплены на корпусе 30, в котором установлены со свободой вращения полувалы 12 и 13. Корпус 30 закреплен на неподвижном элементе транспортного средства (на чертеже не показан).
Устройство работает в следующих режимах: в режиме без блокирования дифференциала и в режиме автоматического блокирования дифференциала.
В режиме без блокирования дифференциала фрикционная муфта 11 выключена. В результате кинематическая связь водила 16 с выходным звеном 9 дифференциала оказывается разорванной, и планетарный ряд 14, сочленяющий полувалы 12 и 13, получает дополнительную степень свободы, что устраняет возможность возникновения паразитной циркулирующей мощности между ведущими мостами при крутых поворотах транспортного средства и движении его по существенно неровной поверхности.
Для включения режима автоматического блокирования дифференциала включается фрикционная муфта 11.
Рассмотрим работу устройства при движении транспортного средства вперед.
Собачки 26 обеих муфт 19 и 22 своими передними по направлению вращения ведущих элементов муфт концами постоянно прижимаются к соответствующим ведомым элементам 18 и 23 в виде храповиков моментом трения, возникающим в результате трения эксцентричного выступа 27 каждой оси 25 о соответствующую тормозную шайбу 28. Если буксование колес ни одного из ведущих мостов не достигло предельно допустимой величины, ведомые элементы 18 и 23 соответствующих обгонных муфт 19 и 22 вращаются благодаря рассчитанным по вышеприведенной методике передаточным отношениям зубчатых рядов, связанных с обгонными муфтами, быстрее соответствующих ведущих элементов 20 и 21. В результате обе обгонные муфты оказываются разблокированными. Планетарный ряд 14 будет иметь две степени свободы, и следовательно, дифференциал транспортного средства будет разблокирован.
При достижении буксования колес, например переднего ведущего моста, предельно допустимой величины водило 16, кинематически связанное с ускоряющим вращением выходным звеном 9 дифференциала, будет ускоряться. Коронная шестерня 15, кинематически связанная с замедляющим вращение выходным звеном 10 дифференциала, будет замедляться. В результате солнечная шестерня 17 увеличит свою скорость вращения. Ведущий элемент 21 обгонной муфты 22, соединенный с солнечной шестерней 17, нагонит соответствующий ведомый элемент 23. Собачка 26 ведущего элемента 21 войдет в зацепление с ведомым элементом 23 в виде храповика. Обгонная муфта 22 заблокируется. В результате количество степеней свободы планетарного ряда 14 уменьшится с двух до одной, и произойдет блокировка дифференциала транспортного средства, который из механизма с двумя степенями свободы превратиться в механизм с одной степенью свободы, способный передавать крутящие моменты на выходные звенья пропорционально сцепным свойствам колес соответствующих ведущих мостов.
Если, наоборот, буксование колес заднего ведущего моста достигнет предельно допустимой величины, то водило 16, кинематически связанное с замедляющим вращение выходным звеном 9 дифференциала, будет замедляться. Коронная шестерня 15, кинематически связанная с ускоряющим вращение выходным звеном 10 дифференциала, будет ускоряться. В результате солнечная шестерня 17 уменьшит скорость, и соединенный с ней ведомый элемент 18 обгонной муфты 19 отстанет и сравняется по скорости с соответствующим ведущим элементом 20. Собачка 26 муфты 19 войдет в зацепление с ее ведомым элементом 18 в виде храповика, обгонная муфта 19 заблокируется. В результате количество степеней свободы планетарного ряда 14 уменьшится с двух до одной, и произойдет блокировка дифференциала транспортного средства.
Когда повышенное буксование переднего ведущего моста прекратится, то ведущий элемент 21 заблокированной обгонной муфты 22 отстанет от соответствующего ведомого элемента 23, и последняя разблокируется. В результате планетарный ряд 14 получит дополнительную степень свободы, и дифференциал транспортного средства разблокируется. Если задний мост прекратит повышенное буксование, ведомый элемент 18 заблокированной обгонной муфты 19 обгонит соответствующий ведущий элемент 20, что приведет к разблокированию данной муфты и, следовательно, дифференциала транспортного средства.
При движении транспортного средства назад направление вращения ведущих и ведомых элементов обеих реверсивных обгонных муфт меняется на обратное. В результате собачки 26 обеих муфт под действием вышеупомянутого момента трения будут теперь прижиматься к соответствующим ведомым элементам другими концами. В остальном принцип работы устройства остается прежним.
Механизм блокировки дифференциала (фиг. 2) связан с межосевым дифференциалом посредством четырех зубчатых пар, состоящих из зубчатых колес 1 и 2, 3 и 4, 5 и 6, 7 и 8. Зубчатое колесо 1 соединено с выходным звеном 9 дифференциала, связанным с приводом переднего ведущего моста, а зубчатые колеса 3 и 5 соединены с выходным звеном 10, связанным с приводом заднего ведущего моста (на чертеже не показаны). Зубчатое колесо 2 связано посредством фрикционной муфты 11 с полувалом 12, а зубчатое колесо 4 установлено на полувале 13 и связано с ведомым элементом 18 реверсивной обгонной муфты 19, ведущий элемент 20 которой соединен с полувалом 13. На этом же полувале расположена реверсивная обгонная муфта 22, связанная с ним ведомым элементом 23, а ведущим элементом 21 соединенная с зубчатым колесом 6. Полувалы 12 и 13 сочленены трехзвенным дифференциальным механизмом, выполненным в виде планетарного ряда 14 со смешанным зацеплением, водило 16 и солнечная шестерня 17 которого, являющиеся соответственно первым и вторым звеньями дифференциального механизма, соединены с соответствующими полувалами 13 и 12, а коронная шестерня 15, являющаяся третьим звеном дифференциального механизма, соединена с зубчатым колесом 8. Зубчатое колесо 7 связано с венцом 24 ведомой шестерни зубчатой передачи, подводящей ведущий момент к дифференциалу.
В качестве реверсивных обгонных муфт 19 и 22 используются известные обгонные храповые муфты двойного действия. Ведомый элемент в каждой муфте выполнен в виде храповика. В ведущем элементе каждой муфты установлена ось 25, на которой закреплена собачка 26 с двумя концами (на чертеже не показаны). Ось 25 имеет эксцентричный выступ 27 для взаимодействия с тормозной шайбой 28, к которой она постоянно поджимается пружиной 29, установленной в ведущем элементе каждой муфты. Тормозные шайбы 28 обеих муфт закреплены на корпусе 30, в котором установлены со свободой вращения полувалы 12 и 13. Корпус 30 закреплен на неподвижном элементе транспортного средства (на чертеже не показан).
Устройство работает в следующих режимах: в режиме без блокирования дифференциала и в режиме автоматического блокирования дифференциала.
В режиме без блокирования дифференциала фрикционная муфта 11 выключена. В результате кинематическая связь солнечной шестерни 17 с выходным звеном 9 дифференциала оказывается разорванной, и планетарный ряд 14, сочленяющий полувалы 12 и 13, получает дополнительную степень свободы, что устраняет возможность возникновения паразитной циркулирующей мощности между ведущими мостами при крутых поворотах транспортного средства и движении его по существенно неровной поверхности.
Для включения режима автоматического блокирования дифференциала включается фрикционная муфта 11.
Рассмотрим работу устройства при движении транспортного средства вперед.
Собачки 26 обеих муфт 19 и 22 своими передними по направлению вращения ведущих элементов муфт концами постоянно прижимаются к соответствующим ведомым элементам 18 и 23 в виде храповиков моментов трения, возникающим в результате трения эксцентричного выступа 27 каждой оси 25 о соответствующую тормозную шайбу 28. Если буксование колес ни одного из ведущих мостов не достигло предельно допустимой величины, ведомые элементы 18 и 23 соответствующих обгонных муфт 19 и 22 вращаются благодаря рассчитанным по вышеприведенной методике передаточным отношениям зубчатых рядов, связанных с обгонными муфтами, быстрее соответствующих ведущих элементов 20 и 21. В результате обе обгонные муфты оказываются разблокированными. Планетарный ряд 14 будет иметь две степени свободы, и, следовательно, дифференциал транспортного средства будет разблокирован.
При достижении буксования колес, например переднего ведущего моста, предельно допустимой величины солнечная шестерня 17, кинематически связанная с ускоряющим вращением выходным звеном 9 дифференциала, будет ускоряться. В результате водило 16, связанный с ним полувал 13 и соединенные с последним ведомый элемент 23 обгонной муфты 22 и ведущий элемент 20 обгонной муфты 19 будут также ускоряться. Ведущий элемент 21 муфты 22 и ведомый элемент 18 муфты 19, связанные кинематически с замедляющим вращение выходным звеном 10 дифференциала, будут замедляться. Ускоренно вращающийся ведущий элемент 20 нагонит отстающий ведомый элемент 18. Собачка 26 ведущего элемента 20 войдет в зацепление с ведомым элементом 18 в виде храповика. Обгонная муфта 19 заблокируется. В результате количество степеней свободы планетарного ряда 14 уменьшится с двух до одной, и произойдет блокировка дифференциала транспортного средства, который из механизма с двумя степенями свободы превратится в механизм с одной степенью свободы, способный передавать крутящие моменты на выходные звенья пропорционально сцепным свойствам колес соответствующих ведущих мостов.
Если, наоборот, буксование колес заднего ведущего моста достигнет предельно допустимой величины, то солнечная шестерня 17, кинематически связанная с замедляющим вращением выходным звеном 9 дифференциала, будет замедляться. Следовательно, водило 16, полувал 13, ведомый элемент 23 муфты 22 и ведущий элемент 20 муфты 19 будут также замедляться. Одновременно ведущий элемент 21 муфты 22 и ведомый элемент 18 муфты 19, кинематически связанные с ускоряющим вращение выходным звеном 10 дифференциала, будут ускоряться. Ускоренно вращающийся ведущий элемент 21 нагонит отстающий ведомый элемент 23. Собачка 26 муфты 22 войдет в зацепление с соответствующим ведомым элементом 23 в виде храповика. Обгонная муфта 22 заблокируется. В результате количество степеней свободы планетарного ряда 14 уменьшится с двух до одной, и произойдет блокировка дифференциала транспортного средства.
Когда повышенное буксование переднего ведущего моста прекратится, то ведущий элемент 20 заблокированной обгонной муфты 19 отстанет от соответствующего ведомого элемента 18, и последняя разблокируется. В результате планетарный ряд 14 получит дополнительную степень свободы, и дифференциал транспортного средства разблокируется. Если задний мост прекратит повышенное буксование, ведомый элемент 23 заблокированной обгонной муфты 22 обгонит соответствующий ведущий элемент 21, что приведет к разблокированию данной муфты и, следовательно, дифференциала транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091251C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2141588C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156903C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2164478C2 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКОЙ ДИФФЕРЕНЦИАЛА ВЕДУЩЕГО МОСТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2246060C2 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2142885C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПРОТИВОБУКСУЮЩАЯ ПЕРЕДАЧА | 1993 |
|
RU2091645C1 |
Использование: в транспортном машиностроении, а именно в устройствах для блокировки дифференциалов транспортных средств. Сущность изобретения: вал выполнен из соосных полувалов, сочлененных трехзвенным дифференциальным механизмом, второе и третье звенья которого по первому варианту соединены с соответствующими концами этих полувалов, связанных другими концами посредством соответствующих зубчатых рядов с выходными звеньями дифференциала, а первое звено посредством третьего и дополнительного зубчатых рядов и двух реверсивных обгонных муфт связано с венцом ведомой шестерни передачи, подводящей ведущий момент к дифференциалу. По второму варианту один из полувалов соединен с обеими реверсивными обгонными муфтами, посредством которых и соответствующих зубчатых рядов он связан с одним выходным звеном, а с другим выходным звеном посредством другого зубчатого ряда связан другой полувал, при этом третье звено дифференциального механизма посредством третьего зубчатого ряда связано с упомянутым венцом, а два других звена соединены с концами упомянутых полувалов. 2 с. и 4 з.п. ф-лы, 2 ил.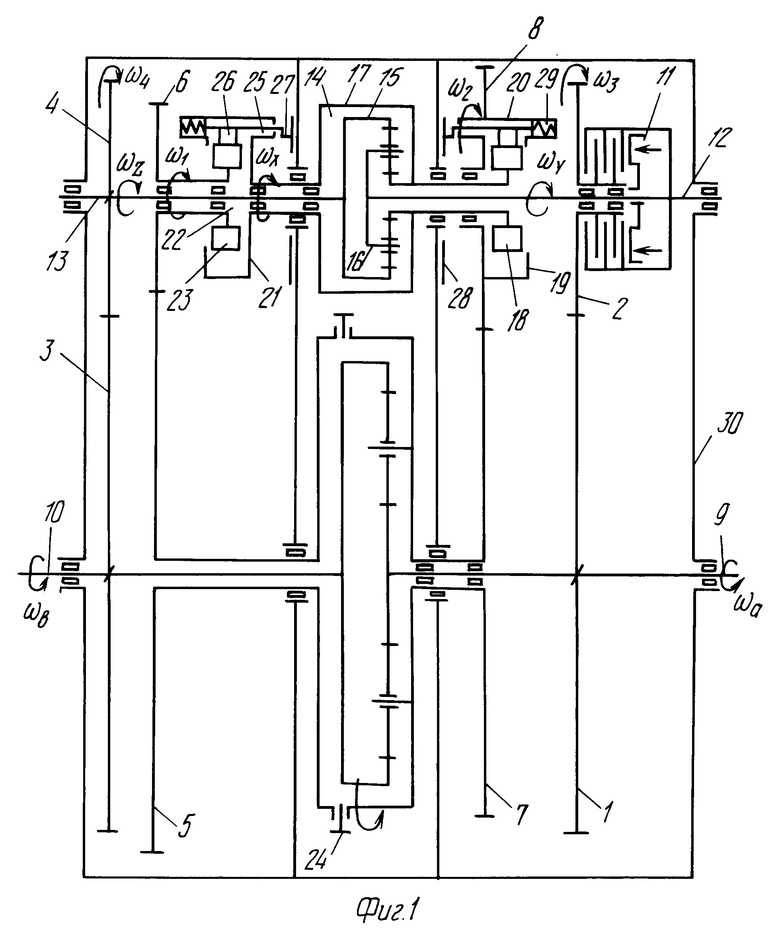
а другой зубчатый ряд, ведомая шестерня которого связана с ведущим элементом другой обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью
где i1 и i2 передаточные отношения зубчатых рядов, связывающих упомянутый венец соответственно с ведомым элементом одной обгонной муфты и ведущим элементом другой обгонной муфты, i1= ωд/ω1; i2= ωд/ω2;
i передаточное отношение двух зубчатых рядов, ведущие шестерни которых связаны соответственно с первым и вторым выходными звеньями дифференциала, i = ωa/ω3= ωb/ω4;
ω1, ω2, ω3, ω4 - угловые скорости ведомых шестерен, связанных соответственно с ведомым элементом одной обгонной муфты, ведущим элементом другой обгонной муфты, полувалом, соединенным с вторым звеном дифференциального механизма, и полувалом, соединенным с третьим звеном последнего;
ωд - угловая скорость венца;
ωa - угловая скорость первого выходного звена дифференциала транспортного средства, соединенного с полуосевой шестерней последнего, диаметр которой по крайней мере не больше диаметра его другой полуосевой шестерни;
ωb - угловая скорость второго выходного звена дифференциала, соединенного с другой полуосевой шестерней последнего;
iд передаточное число дифференциала транспортного средства;
T1 и T2 расчетные параметры, выражаемые следующими зависимостями:

если первым звеном дифференциального механизма является водило,
если вторым звеном дифференциального механизма является водило,
если третьим звеном дифференциального механизма является водило,
S расчетный параметр, выражаемый следующими зависимостями:
S iд м, если выполняется одно из следующих условий: 1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни этого дифференциального механизма; 2) когда вторым звеном дифференциального механизма является водило, третьим звеном должна быть полуосевая шестерня, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S 1 / iд м, если ни одно из этих условий не выполняется;
iд м передаточное число дифференциального механизма,
V расчетный параметр, выражаемый следующими зависимостями:
если выполняется одно из следующих условий: 1) когда первым звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни и при этом должно соблюдаться неравенство iд м > iд; 2) третьим звеном дифференциального механизма является водило,
если ни одно из этих условий не выполняется;
δo - буксование колес при наиболее вероятной тяговой нагрузке транспортного средства на типичном поверхностном фоне;
δдоп - задаваемое предельно допустимое буксование колес.
i1 i•T1,
а зубчатый ряд, ведомая шестерня которого связана с ведомым элементом другой обгонной муфты, выполнен с передаточным отношением, выраженным зависимостью
i2 i•T2,
где i1 и i2 передаточные отношения зубчатых рядов, ведомые шестерни которых связаны соответственно с ведущим элементом одной и ведомым элементом другой обгонных муфт, i1= ωa/ω1; i2= ωa/ω2;
i передаточное отношение двух зубчатых рядов, ведомые шестерни которых связаны соответственно с третьим звеном дифференциального механизма и с полувалом, соединенным с вторым звеном последнего, i = ωa/ω3= ωb/ω4;
ωд - угловая скорость первого выходного звена дифференциала транспортного средства, с которым кинематически связаны обе обгонные муфты;
ωb - угловая скорость второго выходного звена дифференциала транспортного средства;
ω1, ω2, ω3, ω4 - угловые скорости ведомых шестерен зубчатых рядов, соответственно связанных с ведущим элементом одной обгонной муфты, ведомым элементом другой обгонной муфты, третьим звеном дифференциального механизма и полувалом, соединенным с вторым звеном последнего;
ωд - угловая скорость венца;
T1 и T2 расчетные параметры, которые в случае связи с дифференциалом транспортного средства его первого выходного звена по первому варианту, при котором это звено соединено с той полуосевой шестерней дифференциала, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни, определяются из выражений

если первым звеном дифференциального механизма является водило,

если вторым звеном дифференциального механизма является водило,
если третьим звеном дифференциального механизма является водило,
а в случае связи с дифференциалом его первого выходного звена по второму варианту, при котором последнее соединено с другой полуосевой шестерней дифференциала, находятся из выражений

если первым звеном дифференциального механизма является водило,
если вторым звеном дифференциального механизма является водило,
если третьим звеном дифференциального механизма является водило,
где iд передаточное число дифференциала транспортного средства;
S расчетный параметр, выражаемый следующими зависимостями:
S iд м,
если выполняется одно из следующих условий: 1) когда первым или третьим звеном дифференциального механизма является водило, вторым звеном должна быть полуосевая шестерня, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни этого дифференциального механизма; 2) когда вторым звеном дифференциального механизма является водило, третьим звеном должна быть полуосевая шестерня, диаметр которой по крайней мере не меньше диаметра другой полуосевой шестерни этого дифференциального механизма;
S 1 / iд м,
если ни одно из этих условий не выполняется:
iд м передаточное число дифференциального механизма;
V расчетный параметр, выражаемый следующими зависимостями:
если выполняется одно из следующих условий: 1) когда первым или вторым звеном дифференциального механизма является водило, связь с дифференциалом транспортного средства его первого выходного звена должна быть по первому варианту, 2) когда третьим звеном дифференциального механизма является водило, должно соблюдаться неравенство iд м > iд,
и при связи с дифференциалом транспортного средства его первого выходного звена по первому варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой больше диаметра другой полуосевой шестерни, а при вышеупомянутой связи по второму варианту первым звеном дифференциального механизма должна быть полуосевая шестерня, диаметр которой меньше диаметра другой полуосевой шестерни этого дифференциального механизма,
если ни одно из этих условий не выполняется,
где δo - буксование колес при наиболее вероятной тяговой нагрузке транспортного средства на типичном поверхностном фоне;
δдоп - задаваемое предельно допустимое буксование колес.
| Механизм блокировки дифференциалаТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU846329A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
