Изобретение относится к машиностроению, а именно к устройствам для преобразования тепловой энергии, получаемой при разогреве проводника электрическим током, в механическую энергию с реализацией эффектов памяти формы (ЗПФ) и сверхупругости (ЭСУ) рабочими элементами, и может быть использовано для приводов запорной трубопроводной арматуры, коммутационных устройств в электроэнергетике, а также других аппаратов, где имеются жесткие требования к величине хода и чувствительности исполнительных устройств.
Известен термомеханический привод, содержащий два исполнительных элемента из материала с ЭПФ с взаимно противоположным направлением действия. При нагреве одного из элементов с ЭПФ сверх критической температуры (температуры окончания обратного мартенситного превращения) последний вспоминает форму, заданную ему при отжиге, деформируется (одновременно деформируя и ненагретый элемент с ЭПФ) и выполняет определенную работу. При охлаждении первого элемента с ЭПФ и нагреве другого процесс повторяется. Таким образом, каждый из элементов с ЭПФ поочередно является источником силы смещения по отношению к другому элементу [1]
С целью упрощения конструкции привода один из элементов с ЭПФ может быть заменен источником постоянно действующей силы смещения, например контрпружиной. Теперь при охлаждении элемента с ЭПФ в первоначальное положение его возвращает контрпружина. Метод создания силы смещения с помощью контрпружины конструктивно прост, имеет преимущества с экономической точки зрения и поэтому широко применяется на практике. Однако он имеет недостаток, заключающийся в том, что рабочий ход элемента невелик. Это обусловлено тем, что в процессе восстановления формы элемента с ЭПФ постепенно уменьшается сила, восстанавливающая форму, а соответствующая сила смещения в результате сдавливания контрпружины увеличивается. В связи с этим разность двух указанных сил резко уменьшается в процессе восстановления формы. Этой же причиной объясняется и низкая чувствительность привода по температуре [2]
Целью изобретения является увеличение хода привода и повышение его чувствительности.
Цель достигается тем, что в известном термомеханическом приводе содержащем термочувствительный элемент, обладающий эффектом памяти формы, и узел направленной нагрузки по созданию силы смещения относительно термочувствительного элемента, указанный узел направленной нагрузки выполнен в виде двух сверхупругих элементов с взаимно противоположным направлением действия с температурой окончания обратного мартенситного превращения, равной температуре окружающей среды, причем термочувствительный элемент соединен параллельно с одним из сверхупругих элементов, при этом суммарная площадь сечения последнего и термочувствительного элемента равна площади сечения другого сверхупругого элемента.
Очевидно, что выполнение узла направленной нагрузки в виде двух сверхупругих элементов (элементов с ЭСУ) с взаимно противоположным направлением действия:
исключает из его рабочей характеристики "усилие деформация" участок с большой крутизной, подчиняющийся закону Гука;
переводит его рабочую характеристику "усилие деформация" на сверхупругий участок с жесткостью в диапазоне рабочих перемещений, близкой к нулевой, что в принципе невозможно в известных устройствах.
Подключение термочувствительного элемента (элемента с ЭПФ) параллельно с одним из сверхупругих элементов и обеспечение вышеуказанных соотношений сечений сверхупругих и термочувствительного элементов делает возможным значительно снизить сечение элемента с ЭПФ (а значит, и генерируемое усилие) и управлять в целом приводом незначительным по величине сигналом (например, электрическим током, нагревающим элемент с ЭПФ).
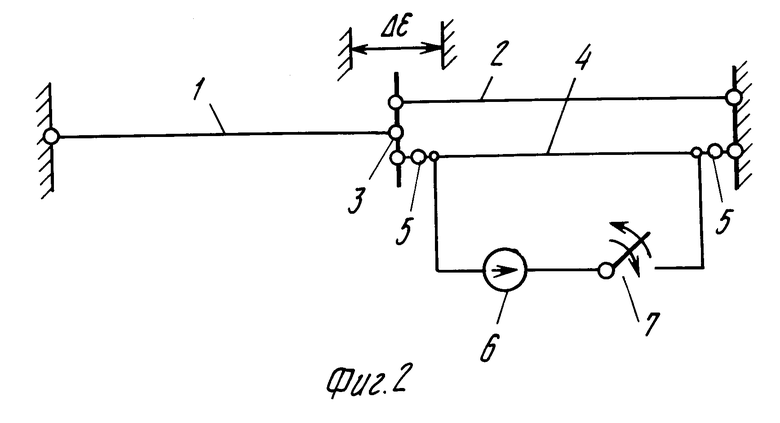
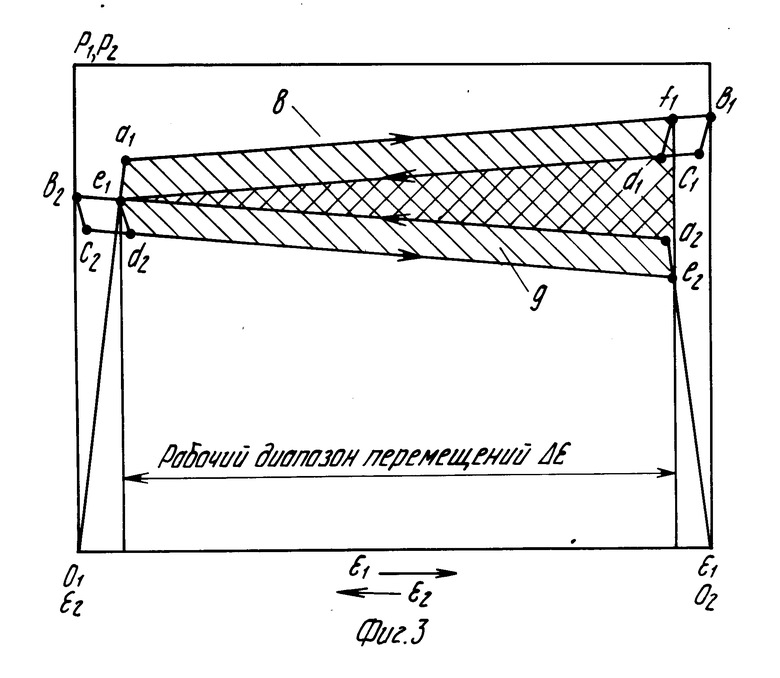
На фиг. 1 показана диаграмма деформации элемента с ЭСУ, выполненного, например, в виде гибкой нити, построенная в осях напряжение (σ) деформация (ε); на фиг. 2 принципиальная схема привода; на фиг. 3 диаграммы деформации двух элементов с ЭСУ с взаимно противоположным направлением действия, построенные в осях усилие (Р) деформация (ε); на фиг. 4 - результирующая характеристика узла направленной нагрузки, выполненного из двух элементов с ЭСУ.
Термомеханический привод содержит узел направленной нагрузки, выполненный из двух сверхупругих элементов 1 (фиг.2) и 2 (фиг.2), выполненных, например, в виде гибких нитей, с взаимно противоположным направлением действия. Указанные элементы связаны с исполнительным органом 3 (фиг.2), имеющим возможность перемещения Δε. Термочувствительный элемент с ЭПФ 4 (фиг.2) соединен параллельно с одним из сверхупругих элементов 2 (фиг.2) через изоляционные элементы 5 (фиг.2). Нагрев элемента с ЭПФ 4 (фиг.2) (управление приводом) осуществляется путем подключения его к источнику питания 6 (фиг.2) при помощи коммутационного устройства 7 (фиг.2). Соотношение сечений элементов с ЭСУ и ЭПФ таково, что
F2+F4≥F1,
где F1, F2 сечения элементов с ЭСУ (соответственно 1 и 2);
F4 сечение элемента с ЭПФ.
За счет различия сечения элементов с ЭСУ их характеристики, построенные в осях Р e, несколько отличаются друг от друга. Характеристика 8 (фиг.3) соответствует элементу 1 (фиг. 2) с большим сечением, а характеристика 9 (фиг.3) элементу 2 (фиг.2) с меньшим сечением.
Эффект памяти формы достаточно изучен и описан. Поэтому для уяснения работы подобного привода рассмотрим эффект сверхупругости. Рассмотрим диаграмму деформации элемента с ЭСУ (фиг.1). В начале деформации подобного элемента идет обычный участок о-а, соответствующий закону Гука. Затем диаграмма резко изгибается вправо, скорость роста напряжения резко уменьшилась (участок а-b). Когда накопилось общее удлинение, соответствующее относительной деформации emax≈ 10%, разгрузка материала идет не по линии b-c-d, а по линии b-c-e. При этом линия разгрузки проходит весьма близко к линии нагружения. Далее участок разгрузки совпадает с первоначальным участком о-а и деформация полностью исчезает. На участках а-b и с-е жесткость подобного элемента близка к нулевой. Напряжение в материале при этом близко к пределу текучести. Деформация, при которой еще возможен 100%-ный возврат формы, достигает 10%
Эффектом сверхупругости обладают в первую очередь сплав Оландера, никелид титана (сплав никеля с титаном) и др. Следует особо отметить, что эффект сверхупругости может быть реализован только у материалов, температура которых в данный момент превышает температуру обратного мартенситного превращения. Указанная температура окончания обратного мартенситного превращения зависит от процентного соотношения компонентов, входящих в материал. Таким образом, можно подобрать состав материала, который будет реализовывать ЭСУ в требуемом диапазоне температур. Для деформации материала, реализующего ЭСУ (например, никелида титана), необходимо приложить напряжение 600-800 Мпа.
Рассмотрим работу привода, показанного на фиг.2. Выбором соответствующего состава элемента обеспечена реализация ЭСУ при температурах начиная с температуры окружающей среды и выше. Предположим, что в результате воздействия некоторого внешнего усилия элемент 1 с ЭСУ полностью деформирован, что соответствует точке b1 на фиг. 3. Элемент 2 с ЭСУ при этом находится в своем естественном состоянии точка о2 на фиг.3. После снятия усилия с элемента 1 последний начинает сокращаться (процесс описывается участками b1-c1-e1), а элемент 2 начинает деформироваться за счет внешнего воздействия со стороны элемента 1 (процесс описывается участками характеристики о2-a2-e1). В точке e1 усилия обоих элементов уравновешиваются, и рабочий орган 3 (фиг.2) занимает крайнее левое положение, соответствующее указанной точке характеристики. Таким образом, влево рабочий орган 3 перемещается под воздействием разности усилий элементов 1 и 2 и определяемых разностью ординат точек участков d1-e1 и a2-e1. Переместить вправо рабочий орган 3 можно, приложив усилие, характеризующееся разностью ординат точек участков а1-f1 и d2-e2. Из фиг. 3 следует, что рабочий диапазон перемещений Δε устройства соответствует только сверхупругим участкам характеристик, а участки, подчиняющиеся закону Гука, из диапазона перемещений исключены.
Построенная на основании фиг.3 результирующая характеристика узла направленной нагрузки, выполненного из двух элементов, реализующих ЭСУ, показана на фиг.4. Восходящая ветвь характеристики соответствует перемещению вправо, а нисходящая влево. Так как восходящие и нисходящие ветви характеристик элементов 1 (фиг. 2) и 2 (фиг.2) близки друг к другу, наклон характеристик на сверхупругих участках мал, то и восходящая и нисходящая ветви результирующей характеристики также будут весьма близки друг к другу, а ее жесткость будет предельно мала. Теперь нужно приложить незначительное усилие к рабочему органу 3 (фиг.2), направленное вправо, чтобы получить его значительное перемещение. Указанное усилие генерируется элементом 4 (фиг.2) с ЭПФ, подключенным параллельно элементу 2 (фиг.2) с ЭСУ, при нагреве элемента 4 электрическим током. При отключении питания элемент с ЭПФ охлаждается, теряет свои свойства и под действием разности усилий DP элементов с ЭСУ возвращается в левое исходное положение.
Наиболее оптимальным соотношением сечений элементов 1, 2, 4 является
F2 + F4 F1.
В этом случае элемент с ЭПФ должен компенсировать разность усилий между элементами 1 и 2 с ЭСУ, которая мала по абсолютной величине и изменяется незначительно. Поэтому и сечение элемента с ЭПФ и требуемое усилие, возникающее при его нагреве, также незначительны. Величина сигнала управления (тока, потребляемого от источника питания 6 (фиг. 2)) приводом также не требуется большой.
Выбором соотношения F1 и F2 можно установить требуемое первоначальное значение силы смещения ΔPнач. На фиг.3 и 4 показаны характеристики для случая ΔPнач = 0. Уменьшая сечение F2, можно получить ΔPнач, отличную от нуля. Установка ΔPнач определяется конкретными условиями работы устройства. Жесткость характеристики, близкая к нулевой в диапазоне рабочих перемещений, по-прежнему сохраняется. Наличие ограничителей перемещения Δε позволяет и в этом случае исключить из результирующей характеристики привода участки, подчиняющиеся закону Гука.
Таким образом, предложенная схема привода отличается от известных значительной величиной рабочего хода и высокой чувствительностью исполнительного органа. Использование предложенного решения позволяет создать возвратно-поступательные приводные устройства с улучшенными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗБОРНЫЙ УЗЕЛ | 1992 |
|
RU2091932C1 |
| Воздушная линия электропередачи | 1989 |
|
SU1753534A1 |
| ТЕРМОФРИКЦИОННЫЙ ПОРОДОРАЗРУШАЮЩИЙ ИНСТРУМЕНТ | 2004 |
|
RU2279532C2 |
| ВОЗДУШНАЯ ЛИНИЯ ЭЛЕКТРОПЕРЕДАЧИ | 1991 |
|
RU2072601C1 |
| Охлаждаемый поршень малооборотного двигателя внутреннего сгорания | 1990 |
|
SU1726822A2 |
| Способ деформационно-термической обработки для формирования функциональных характеристик медицинского клипирующего устройства из сплава Ti-Ni с памятью формы | 2016 |
|
RU2635676C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАНОСТРУКТУРНОГО СВЕРХУПРУГОГО СПЛАВА ТИТАН-НИКЕЛЬ | 2024 |
|
RU2831627C1 |
| Способ изготовления теплового двигателя | 1989 |
|
SU1746061A1 |
| Устройство для соединения законцовок трубопровода | 2023 |
|
RU2824695C1 |
| Способ термообработки сплавов системы С @ - А @ - М @ с эффектом запоминания формы | 1990 |
|
SU1731859A1 |

Использование: машиностроение. Сущность изобретения: термомеханический привод содержит термочувствительный элемент, обладающий эффектом памяти формы, и узел направленной нагрузки по созданию силы смещения относительно термочувствительного элемента. Для увеличения хода привода и повышения его чувствительности узел направленной нагрузки выполнен в виде двух сверхупругих элементов 1, 2 с взаимно противоположным направлением действия с температурой окончания обратного мартенситного превращения, равной температуре окружающей среды, причем термочувствительный элемент 4 соединен параллельно с одним из сверхупругих элементов 1 или 2. Суммарная площадь сечения сверхупругого элемента 2 и термочувствительного элемента 4 равна площади сечения первого сверхупругого элемента. 4 ил.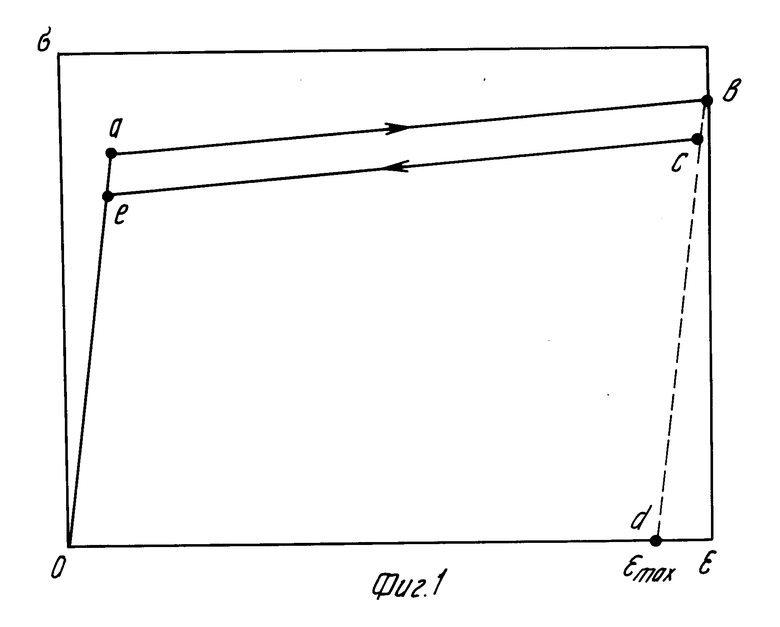
Термомеханический привод, содержащий термочувствительный элемент, обладающий эффектом памяти формы, и узел направленной нагрузки по созданию силы смещения относительно термочувствительного элемента, отличающийся тем, что узел направленной нагрузки выполнен в виде двух сверхупругих элементов со взаимно противоположным направлением действия с температурой окончания обратного мартенситного превращения равной температуре окружающей среды, причем термочувствительный элемент соединен параллельно с одним из сверхупругих элементов, при этом суммарная площадь сечения последнего и термочувствительного элемента равна площади сечения другого сверхупругого элемента.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тихонова А.С., Герасимов А.П., Прохорова И.И | |||
| Применение эффекта памяти формы в современном машиностроении - М.: Машиностроение, 1981, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4841730, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
