Изобретение относится к механике, в частности к кулисно-рычажным механизмам.
Заявляемые устройства могут быть использованы либо самостоятельно в качестве, например, преобразователя вращательного движения в колебательное, либо в составе других устройств, например в сканерах, применяющихся для исследования дефектов деталей и узлов механизмов, доступ к которым затруднен. Указанные сканеры могут быть использованы в медицине для внутриполостных исследований живых организмов.
Необходимо отметить, что существует множество кулисно-рычажных механизмов.
Известен кулачково-рычажный механизм с шатуном, совершающим сложное движение. Устройство содержит неподвижную ось 03. Кулачок 1 вращается вокруг неподвижной оси 03. Профиль кулачка состоит из шести дуг, описанных из центров 01, 02 и 03. Большие дуги d сопрягаются с малыми дугами e, описанными из тех же центров 01, 02 и 03. Шатун 2 имеет две плоскости a-a и b-b, с которыми соприкасается кулачок 1.
Шатун входит во вращательные пары A и B с ползуном и рычагом. Ползун скользит вдоль оси x-x направляющей f, а рычаг вращается вокруг неподвижной оси C. При вращении кулачка шатун совершает сложное движение. При соприкосновении кулачка с участками d и e, описанными дугами из центра O3, шатун будет иметь фазу выстоя. Кинематическое замыкание механизма обеспечивается постоянством диаметра кулачка 1, равным кратчайшему расстоянию между плоскостями a-a и b-b. [1]
Недостатком данного механизма является появление неопределенности движения за счет наличия промежуточного звена.
Известен также кулисно-рычажный механизм грейфера киноаппарата. Кривошип (рис. а) выполнен в форме диска, вращающегося вокруг неподвижной оси A. Палец B входит в прорезь b звена, скользящего вдоль неподвижных направляющих. Звено движется вдоль направляющих звена в направлении, перпендикулярном к движению звена так, как это показано на рис. б. Движение звена в этом направлении осуществляется штифтом, входящим одновременно в прорези b и с звеньев. При вращении кривошипа кулиса и звено движутся возвратно-поступательно в вертикальном направлении. Штифт, двигаясь в прорезях b и c, периодически отодвигает звено назад и выводит зубья последнего из зацепления с кинолентой. [2]
Недостатком такого механизма являются ограниченные функциональные возможности, поскольку обеспечивается перемещение ведомого звена только взад-вперед.
Технической задачей изобретения является создание устройства, позволяющего осуществить колебательное движение ведомого звена вокруг оси, расположенной перпендикулярно оси вращения ведущего звена с постоянным зацеплением звеньев с использованием более простых, надежных и эффективных механизмов.
Второй технической задачей изобретения является создание малогабаритного устройства, предназначенного для использования в труднодоступных местах, особенно в медицинской диагностике, а также упрощение изготовления устройства и снижение стоимости устройства.
Задачи решаются следующим образом.
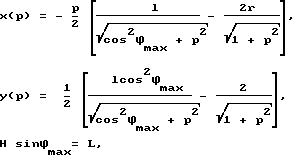
В кулисно-рычажном механизме, включающем ведущее звено, содержащее кривошип, выполненный в форме диска, установленного с возможностью вращения вокруг оси с эксцентрично установленным пальцем, ведомое звено, включающее две параллельные направляющие, образующие кулису, установленную между двумя опорами с возможностью взаимодействия с пальцем, направляющие кулисы выполнены цилиндрическими, одинакового диаметра и связаны с опорами соединительным элементом, ось которого параллельна осям направляющих, кулиса установлена с возможностью поворота вокруг соединительного элемента, а контур поперечного сечения пальца задан уравнениями: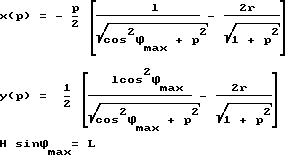
где Φmax максимальный угол поворота кулисного механизма вокруг дополнительного соединительного элемента,
l расстояние между осями направляющих кулисного механизма,
r радиус направляющей кулисы,
H радиус качания кулисы,
L радиус вращения пальца,
x ось абсцисс для функции, определяющей форму пальца,
y ось ординат для функции, определяющей форму пальца,
p параметр функции, причем p y'(x), а ширина паза кулисы равна максимальному диаметру пальца.
Отличия второго варианта: палец выполнен цилиндрическим, опоры кулисы связаны соединительным элементом, ось которого параллельна осям направляющих, кулиса установлена с возможностью поворота вокруг оси соединительного элемента, поперечное сечение направляющих кулисного механизма получено из уравнений
где 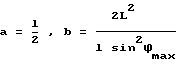
Φmax максимальный угол поворота кулисного механизма вокруг дополнительного соединительного элемента,
l расстояние между осями направляющих кулисного механизма,
R радиус пальца,
H радиус качания кулисы,
L радиус вращения пальца,
x ось абсцисс для функции, определяющей форму направляющей,
y ось ординат для функции, определяющей форму направляющей,
y' первая производная y по x,
y'' вторая производная y по x,
P параметр функции, причем p y'(x)
а диаметр пальца равен проекции на торец пальца максимального расстояния между образующими направляющих кулисы при максимальном угле поворота ведомого звена.
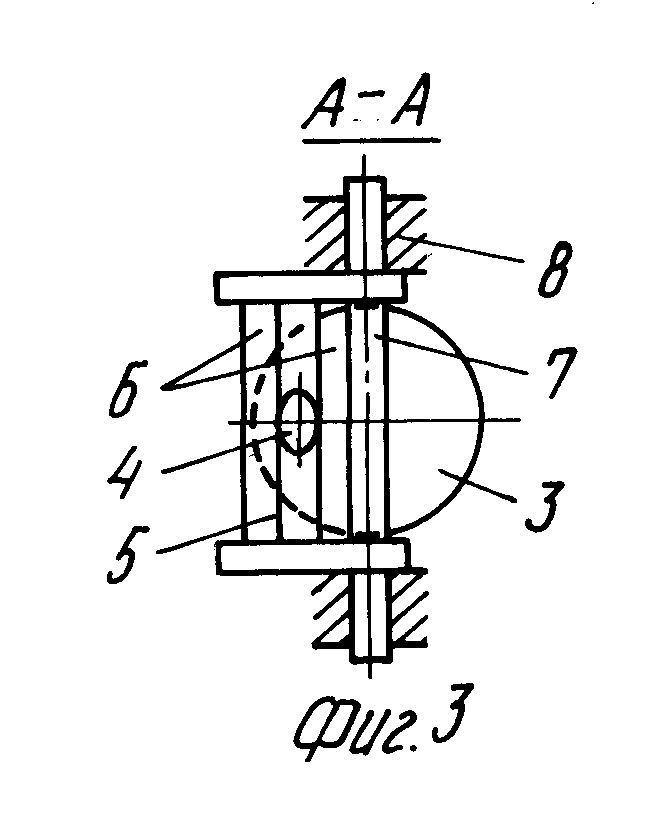
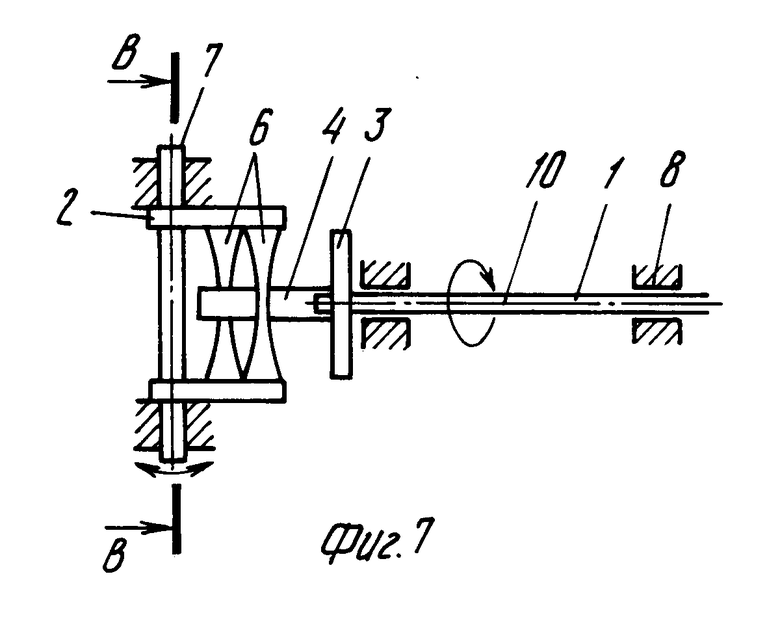
На фиг. 1 представлено поперечное сечение устройства, вид сбоку, первый вариант; на фиг. 2 то же сечение устройства, вид сверху, первый вариант; на фиг. 3 поперечное сечение устройства фиг. 2 по А-А, первый вариант; на фиг. 4 поперечное сечение пальца, первый вариант; на фиг. 5 поперечное сечение направляющих кулисного механизма, второй вариант; на фиг. 6 поперечное сечение устройства, вид сбоку, второй вариант; на фиг. 7 поперечное сечение устройства, вид сверху, второй вариант; на фиг. 8 поперечное сечение устройства фиг. 7 по В-В, второй вариант, на фиг. 9 вид в аксонометрии, первый вариант; на фиг. 10 вид в аксонометрии, второй вариант.
Устройство в статике.
В состав устройства входят: ведущее звено 1 (кривошип 3, палец 4, ось 10) и ведомое звено 2 (кулиса 6).
Ось 10 установлена в опоре 8 и связана с одной стороной кривошипа 3 в форме диска, на другой стороне которого установлен палец 4. Кулиса представляет собой две опоры, связанные направляющими 6 и дополнительным элементом 7. Палец 4 установлен в пазу 5 кулисы 6 с возможностью взаимодействия с направляющими 6.
1 ведущее звено (ось, диск, палец); 2 ведомое звено (кулиса); 3 - кривошип в форме диска; 4 палец; 5 паз; 6 направляющие кулисы; 7 - дополнительный элемент ведомого звена (ось качания); 8 опора оси ведущего звена; 9 радиус качания кулисы (H); 10 ось; 11 радиус вращения пальца (L); 12 радиус пальца (R).
Работает устройство следующим образом
Первый вариант.
Ось 10 ведущего звена 1 поворачивают в любом направлении, при этом поворачивается диск 3 кривошипа, на котором с другой стороны установлен эксцентрично палец 4, взаимодействующий с прямоугольным пазом 5 кулисы 2. За счет взаимодействия направляющих 6 с пальцем 4, форма которого выбрана из соотношения для первого варианта, кулиса 2 совершает качание вокруг оси дополнительного элемента 7 в пределах Φmax Причем палец и кулиса взаимодействуют в двух точках в любой фазе движения.
Второй вариант.
В целом работа второго варианта аналогична первому, за исключением того, что цилиндрический палец 4 скользит по фигурным поверхностям направляющих 6 кулисы 2, форма которых выбрана из соотношения второго варианта.
При реализации описанных механизмов появляется возможность кроме чистого преобразования вращательного движения в качательное использовать их для диагностики деталей узлов и механизмов, снабдив ведомое звено зондирующим датчиком любого типа, в зависимости от условий применения и возможностей пользователя. В частности, может быть эффективно использован в ультразвуковых датчиках.
Механизмы обладают минимальным числом элементов, входящим в них, однозначно передают движение ведущего звена к ведомому, без промежуточных звеньев.
За счет качания ведомого звена вокруг оси, перпендикулярной оси вращения ведущего звена, устройство может быть эффективно использовано в труднодоступных местах, обеспечивая поле обзора, достаточное для исследований.
Как следует из описания конструкции и работы устройства, изготовление его не составит трудностей и не будет дорогим, так как в устройствах могут быть использованы пригодные дешевые распространенные материалы, например, металлы и пластики.
Конструкция узлов и кинематика устройства просты и легко реализуемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2500938C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| КУЛИСНО-ЗУБЧАТЫЙ РЕГУЛИРУЕМЫЙ ПРИВОД КОНВЕЙЕРА | 2000 |
|
RU2187725C2 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В КУЛИСНОМ МЕХАНИЗМЕ И КУЛИСНЫЙ МЕХАНИЗМ ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2133832C1 |
| Импульсный вариатор | 1985 |
|
SU1310564A1 |
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |







Использование: изобретение относится к механике, в частности к кулисно-рычажным механизмам. Сущность изобретения: устройство, отличающееся тем, что направляющие в кулисном механизме выполнены цилиндрическими одинакового диаметра и связаны с опорами 8 соединенным элементом 7, кулисный механизм установлен с возможностью поворота вокруг оси соединительного элемента, поперечное сечение пальца выбрано из соотношений
Сущность изобретения по второму варианту: устройство, отличающееся тем, что палец 4 выполнен цилиндрическим, опоры 8 кулисного механизма связаны дополнительным соединительным элементом, ось которого параллельна осям направляющих 6, поперечное сечение направляющих 6 кулисного механизма выбрано из соотношений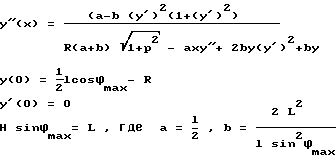
2 с.п. ф-лы, 10 ил.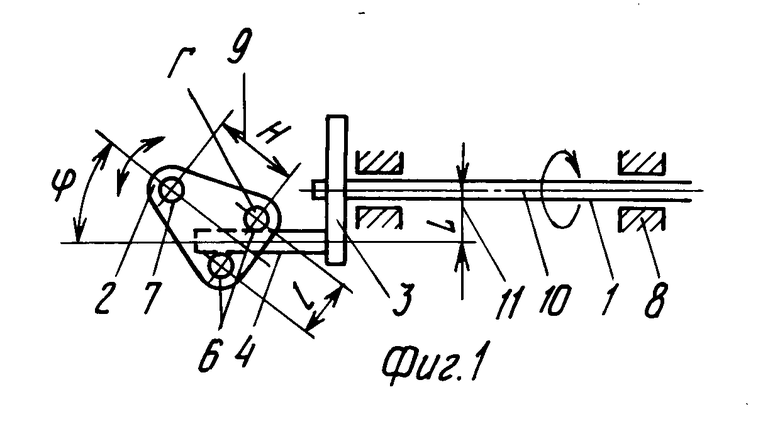
где Φmax - максимальный угол поворота кулисы вокруг соединительного элемента;
l расстояние между осями направляющих кулисы;
r радиус направляющей кулисы;
H радиус качания кулисы;
L радиус вращения пальца;
x ось абсцисс для функции, определяющей контур поперечного сечения пальца;
y ось ординат для функции, определяющей контур поперечного сечения пальца;
p параметр функции, причем p y'(x),
а ширина паза кулисы равна максимальному диаметру пальца.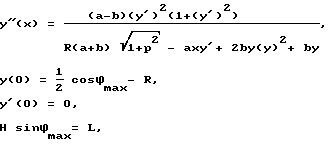
где a l/2;
Φmax - максимальный угол поворота кулисы вокруг соединительного элемента;
l расстояние между осями направляющих кулисы;
R радиус пальца;
H радиус качания кулисы;
L радиус вращения пальца;
x ось абсцисс для функции, определяющей форму направляющей;
y ось ординат для функции, определяющей форму направляющей;
y' первая производная y по x;
y'' вторая производная y по x;
p параметр функции, причем p y'(x),
а диаметр пальца равен проекции на торец пальца максимального расстояния между образующими направляющих кулисы при максимальном угле поворота ведомого звена.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1981, т.V, с.133, N 3010 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.275, N 1320. | |||
