(5) ПРИВОД ПРЕРЫВИСТОГО ДВИЖЕНИЯ РОТОРОВ УПАКОВОЧНЫХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| Привод прерывистого движения роторов упаковочных машин | 1983 |
|
SU1109343A2 |
| Кулачково-кулисный механизм с остановками | 1988 |
|
SU1523799A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО для ПЕРЕКЛЮЧЕНИЯ ШАГА ОБМОТКИ СТАТОРООБМОТОЧНОГО СТАНКА | 1970 |
|
SU278835A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
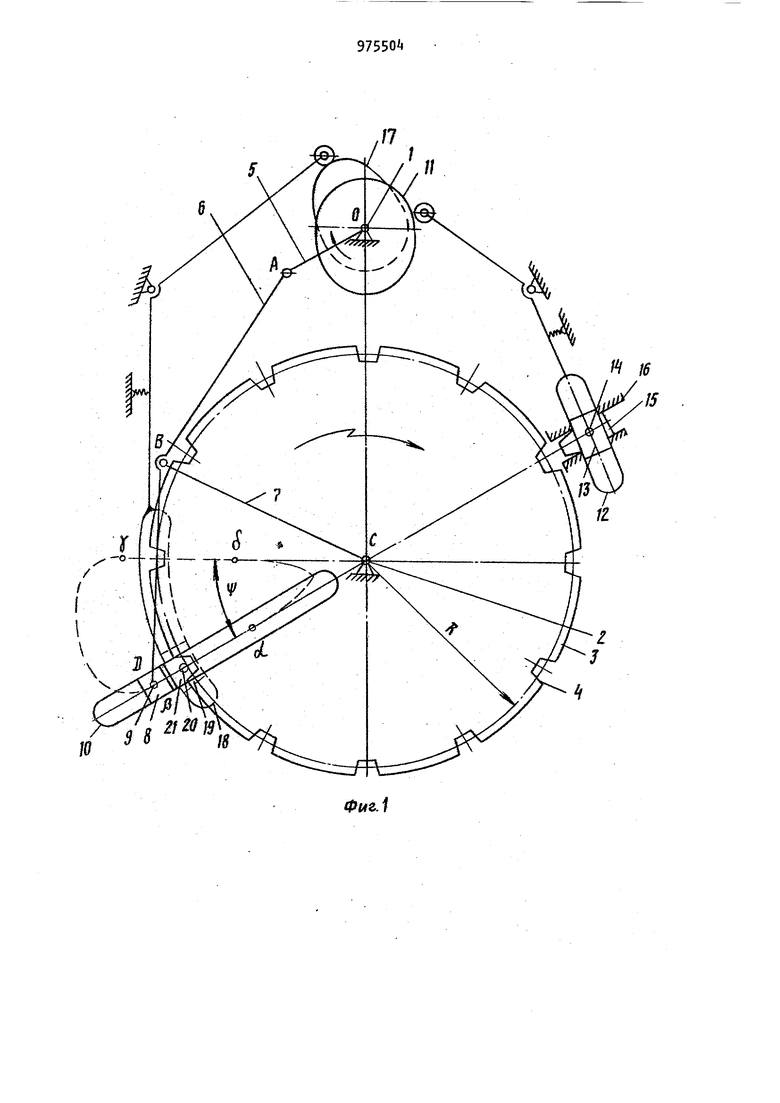
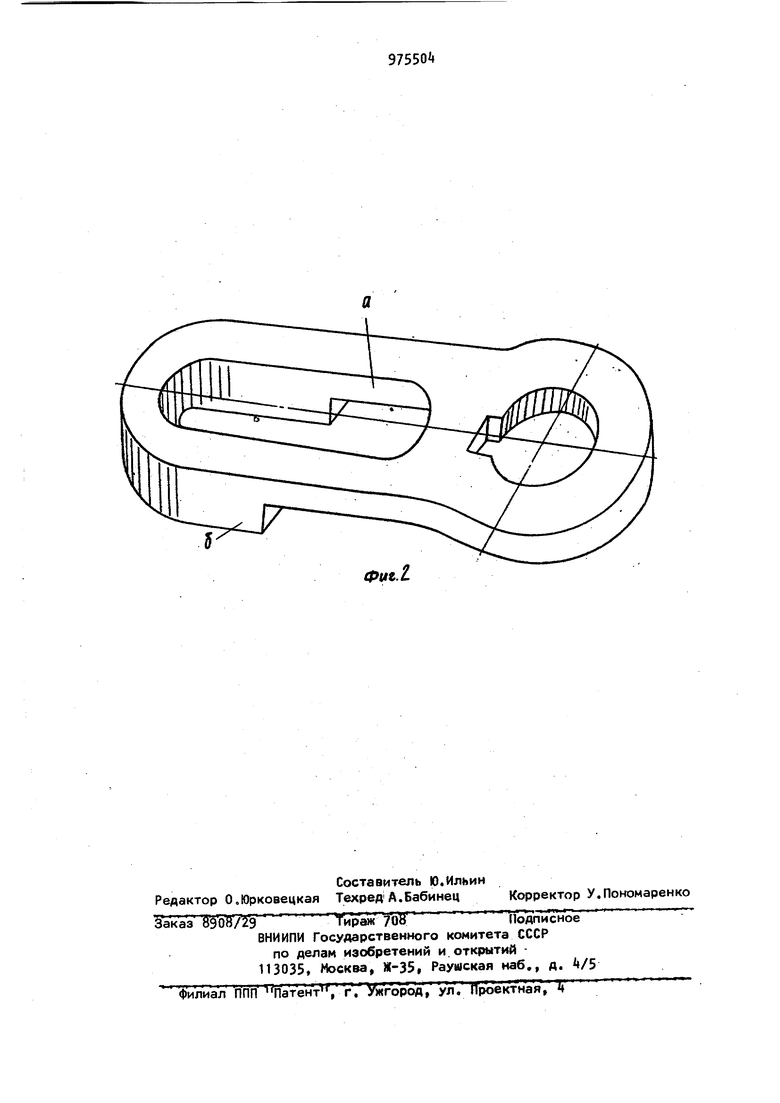
Изобретение относится к фасовочно-упаковочной технике и может быть использовано для тяжелонагруженных многопозиционных упаковочных автоматов с периодическим перемещением обрабатываемых объектов Известен привод прерывистого движения роторов упаковочных машин, содержащий ведущий кулачковый вал, ведомый вал, позиционный диск с клиновидными пазами, механизм периодического поворота позиционного диска, механизм фиксации диска, а также механизм замыкания и размыкания диска. Механизмы периодического поворота, фиксации, замыкания и размыкания позиционного диска в приводе выполнены кулачково-кулисно-ползунными. Введение высшей кулачковой пары в механизм периодического поворота позиционного диска обеспечивает длительные остановки ведомого звена в крайних положениях, во время которых вводятся в пазы позиционного дис ка и выводятся из них ведущий и фиксирующий ползуны С1). Однако использование известного привода для тяжелонагруженных устройств приводит к большим контактным напряжениям в кулачковой паре механизма периодического поворота позиционного диска, что снижает долговечность и надежность привода, а в конечном итоге ведет к снижению производительности, поскольку для нормальной работы упаковочной машины приходится снижать темп движения ведущего вала, Целью изобретения является повышение производительности и долговечности тяжелонагруженных упаковочных машин. Поставленная цель достигается тем, что в приводе прерывистого движения роторов упаковочных машин, содержащем ведущий вал, ведомый вал, попозиционный диск с пазами, механизм периодического поворота диска, меха(Низм фиксации диска и механизм замы кания и размыкания диска, механизм (Периодического поворота диска выполнен рычажно-кулисным, кулиса которого имеет две прорези разной длины, расположенные в плоскостях, параллель ных плоскости вращения диска„ На фиг„ 1 изображена кинематическая схема привода прерывистого движения роторов упаковочных машин; на фиг. 2 - кулиса, общий вид Привод содержит (фиг, 1) ведущий кулачковый вал 1, ведомый вал 2 с жестко посаженным на него позиционным диском 3, имеющим пазы о Механизм периодического поворота позиционного диска, выполненный рычажнокулисным, включает кривошип 5, шатун 6, коромысло 7, кулисный Kaf.feHb 8, шарнирно соединенный посредством пальца 9 с диатуном 6, и кулису 1Q с двумя прорезями разной длины фиг, расположенными а плоскостях, параллельных плоскости вращения позиционн го диска о При этом прорезь а является длинной, а короткая прорезь образ вана выступом б с, Механизм фиксации позиционного ди ка, выполненный кулачково-кулисно-по зунным, включает кулачок 11, кулису 12, кулисный камень 13 шарнирно сое диненный посредством пальца 1 с пол зуном 15 неподвижную направляющую 1б, Механизм замыкания-размыкания по зиционного диска, выполненный кулачк во-кулисно-ползунным, включает кулачок 17, кулису 18, камень-ползун 19, шарнирно соединенный посредством пал ца 20 с камнем-ползуном 21 (который, взаимодействует с короткой прорезью кулисы 10J входящей в состав механизма периодического поворота позици онного диска), А с длинной прорезью кулисы 10 взаимодействует кулисный камень того же механизма Устройство работает следующим образом j. При непрерывном равномерном вращении ведущего вала 1 ведомый вал 2 позиционным диском 3 Совершает плавное вращение с закономерными периодическими остановками, благодаря следующему взаимодействию меха,низмов„ Непрерывно враи1ающийся кривошип 5 жестко посаженный на валу 1, передает движению шатуну 6, хвостовик, которого через палец 9 и-кулисный камень 8 сообщает аозвратио-вращательное движение кулисе 10, имеющей длительные остановки в крайних положениях за счет того, что на данных интервалах движения кривошипа 5 кулисный камень В движется вдоль кулисы 10, а последняя остается неподвижной Чтобы обеспечить выстой кулисы в крайних положениях, необходимо для данного числа пазов (позиций) позиционного диска рассчитать по специальным формам относительные размеры звеньев QA, ОС, АВ, ВС, BD и AD, которые обеспечивают движение пальца 9 по замкнутой шатунной траекториио р)Jcfat, имеющей два прямолинейных участка, В период совпадения осевой линии прорези кулисы 18 с прямолинейными участками траектории пальца 9 () кулиса 10 имеет не мгновенные, а длительные остановки в крайних положениях Это дает возможность плавно осуществлять операции замыкания, размыкания и фиксации позиционного диска 3 Перед началом поворота позиционного диска 3 кулиса 10 неподвижна и находится в нижнем крайнем положении, так как палец 9 описывает в это время прямолинейный участок траекториио(.|Ь, который совпадает с осевой линией кулисной прорези кулисы 10, В это время кулачок 11, взаимодействуя на кулису t2, переводит ее в правое крайнее положение, благодаря чему камень 13 выводится из паза k позиционного диска 3, одновременно кулачок 17. воздействуя на кулису 18, вводит камень-ползун 21 в очередной паз покоящегося позиционного диска 3. После этого палец 9 описывает участок траектории , и кулиса 10 перемещается по ча- i совой стрелке в верхнее крайнее положение, поворачивая вместе с собой посредством камнч-ползуна 21 позиционный диск 3 на очередную поуголМ -J-, где Z зицию, т„е„ на число пазов. Такое перемещение диска происходит потому, что центровой профиль кулисы 18 очерчен по дуге окружности , радиус которой равен радаусу R позиционного диска 3, а кулиса .18 в это время играет роль неподвижной направляющей для камня-ползуна 19, шарнирно соединенного посредством пальца 20 с камнем-ползуном 21, поворачивающим позиционный диск 3 на очередную позицию В верхнем крайнем положении кулиса 10 снова имеет длительную остановку, так как палец 9 вместе с кулисным камнем 8 перемещается по прямолинейному участку траектории , совпадающему с осевой линией ку лисной прорези кулисы Ю, При крайнем верхнем положении остановленной кулисы 10 срабатывает механизм фикс ции позиционного диска 3: кулачок 11, воздействуя на кулису 12, пере.водит ее в левое крайнее положение и посредством ползуна 15 позиционны диск 3 оказывается зафиксированным, В это же время срабатывает механизм замыкания и размыкания пози-ционного диска 3: кулачок 17, воздейстуя на кулису 18, переводит ее в левое крайнее положение, и камень ползун 21 оказывается выведенным из паза позиционного диска Зо При зафиксированном позиционном диске 3 и выведенном из паза позиционного диска 3 камне-ползуне 21 механизм периодического поворота по зиционного диска 3 осуществляет обратный (холостой) ход, поворачивая кулису 10 против часовой стрелки до нижнего крайнего положения, когда палец 9 описывает участок траектории tfol. При дальнейшем движении паль ца 9 по прямолинейному участку траектории otj кулиса 10 находится в покое, срабатывает механизм фиксации, освобождая позиционный диск 3 для по ворота его на очередную позицию, одновременно срабатывает механизм замы кания и размыкания, вводя каменьползун 21 в паз позиционного диска 3, и далее цикл повторяется. Предлагаемый привод прерывистого движения роторов для тяжелонагруг енных упаковочных машин-автоматов 6 повышает долговечность, надежность как самый нагруженный механизм, а именно механизм периодического поворота и позиционного AViCKa, в этом устройстве выполнен рычажно-кулисным и содержит только низшие кинематические пары, отличающиеся значительно большей нагрузочной способностью по сравнению с высшими кулачковыми парами, содержащимися в механизме периодического поворота позиционного диска известного привода Расчеты показывают, что привод прерывистого движения роторов упаковочных машин дает возможность существенно снизить напряжения в деталях привода и повысить производительность тяжелонагруженных упаковочных машин на 7-9 Формула изобретения Привод прерывистого движения роторов упаковочных машин, содержащий ведущий кулачковый вал, ведомый вал, позиционный диск с пазами, механизм периодического поворота диска, механизм фиксации диска и механизм замыкания и размыкания диска, отличающийся тем, что, с целью повышения производительности и долг говечности тяжелонагруженных упаковочных машин, механизм периодического поворота диска выполнен рычажно-кулнсным, кулиса которого имеет, две прорези разной длины, расположенные в плоскостях, параллельных плоскости вращения диска Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР 590186, кяо В 65 В 65/Oi, 1976,
