Изобретение относится к области радиофизики и лазерной локации и может быть использовано для контроля поперечных и продольных профилей железнодорожных сооружений, сооружений метро, различных путепроводов, трубопроводов, в шахтах, горных разработках, а также для построения профилей других сооружений и объемов.
Основными направлениями в разработке и совершенствовании способов и устройств построения профилей трехмерных объектов являются повышение точности измерений, плотности замеров по профилю, а также скорости измерений и автоматизации процессов обработки и архивирования информации.
Известно устройство измеритель негабаритности туннелей [1] реализующее способ, заключающийся в формировании светового контура, соответствующего контуру поперечного сечения туннеля, проецировании светового контура на трафарет, регистрации оптического сигнала светового контура с помощью последовательно соединенных объектива, оптоэлектронного преобразователя и электронной обработке сигнала.
Данный способ и реализующее его устройство не позволяют работать даже при средней внешней освещенности, так как понижение контраста напрямую снижает точность измерений. Реализовать большие скорости измерений в данном устройстве не представляется возможным, так как происходит размывание светового контура при движении.
Известны устройство для измерения габаритов и реализующий его способ [2] разработанные фирмой EUMIG (Австрия), заключающийся в сканировании габарита лазерным лучом с помощью вращающейся измерительной головки, частота вращения которой пропорциональна пройденному расстоянию и измерении дальности до точек габарита. Данное устройство обеспечивает измерение габарита вдоль пути с интервалом 2 м. При неподвижном положении измерительной головки допускается измерение продольного профиля при скорости не более 18 км/ч.
Наиболее близким аналогом является способ построения профилей трехмерных объектов, реализованный в устройстве "Profil 2000" [3] заключающийся в дискретном лазерном сканировании пространства в плоскости, перпендикулярной направлению движения с последующей регистрацией отраженного сигнала и определением дальности до каждой из точек дискретного сканирования, построении профилей объектов с учетом углового положения точек дискретного сканирования и скорости движения.
Устройство "Profil 2000" содержит устанавливаемые на движущемся средстве лазер, блок обработки данных, включающий входной объектив и последовательно соединенные фотоприемник, блок формирования информации о дальности и компьютер, блок синхронизации, блок дискретизации измерений, включающий вращающееся зеркало.
Информацией о профиле служат угол поворота вращающегося зеркала и расстояние от точки обзора до препятствия. Число точек, измеряемых в одном профиле, доходит до 200. Измерение одного профиля производится из стационарного состояния прибора и занимает от 0,8 до 2,0 с в зависимости от выбранного числа точек по периметру профиля. Кассеты с записями для окончательной обработки передаются на стационарную ЭВМ.
Технический результат, обеспечиваемый изобретением, возможность использования эффекта, связанного с одномоментным опросом одной точки с разнесенной в пространстве базы для работы на высокой частоте, в микросекундном режиме в метровом и сантиметровом диапазоне дальности.
Сущность изобретения заключается в достижении упомянутого технического результата в способе построения профилей трехмерных объектов, предусматривающем дискретное лазерное сканирование пространства в плоскости, перпендикулярной направлению с последующей регистрацией отраженного сигнала и определением дальности до каждой из точек дискретного сканирования, построение профилей объектов с учетом углового положения точек дискретного сканирования и скорости движения, при этом во время регистрации отраженный сигнал разделяют на три сигнала, два из них одномоментно и пространственно линейно преобразовывают в видеосигналы, временной интервал между которыми пропорционален дальности К до объекта, измеряют мощность третьего сигнала и при достижении ею верхней границы динамического диапазона ограничивают длительность лазерного импульса, а дальность R определяют по формуле
R k1/(1+k2•k3•h), (1)
где h величина, пропорциональная временному интервалу между центрами световых отметок;
k1, k2 коэффициенты, определяемые в результате калибровки;
k3 коэффициент, связанный с масштабом пространственного линейного преобразования.
Отраженный сигнал разделяют на три одинаковых по мощности и форме сигнала, а пространственное линейное преобразование осуществляется вдоль линии, соединяющей центры первого и второго разделенных сигналов.
Суть изобретения заключается в достижении упомянутого технического результата, в частности в устройстве для построения профилей трехмерных объектов, содержащее устанавливаемые на движущемся средстве импульсный лазер, блок обработки данных, включающий входной объектив и последовательно соединенные первый фотоприемник, блок формирования информации о дальности и компьютер, блок синхронизации, соединенный с первым фотоприемником и блоком формирования информации о дальности, блок дискретизации измерений, включающий вращающееся зеркало, дополнительно в устройство введен блок регулировки длительности лазерного импульса, выход которого соединен с входом лазера, блок обработки данных дополнительно включает последовательно соединенные второй фотоприемник с выходной линзой и блок измерения мощности отраженного сигнала, выход которого соединен с первым входом блока регулировки длительности лазерного импульса, а второй вход с выходом блока синхронизации, диафрагму с двумя отверстиями и оптически связанные с последними два оптических клина, при этом первый фотоприемник выполнен протяженным и дискретизированным, блок дискретизации измерений дополнительно содержит блок стабилизации частоты вращения зеркала, вход и выход которого связаны с выходом и входом вращающегося зеркала, а второй вход связан с блоком синхронизации, и блок синхронизации фазы вращения зеркала и запуска лазера в пачечном режиме, вход которого связан с выходом вращающегося зеркала, а выход со вторым входом блока регулировки длительности лазерного импульса и блоком формирования информации о дальности.
Отверстия в диафрагме выполнены одинаковыми и расположены симметрично относительно центра входного объектива, перед диафрагмой по оси входного объектива установлена призма, оптические клинья выполнены идентичными и установлены перед входным объективом напротив отверстий экрана, а протяженный дискретизированный фотоприемник установлен вдоль линии, соединяющей центры световых отметок, формируемых отверстиями диафрагмы в плоскости изображений входного объектива, оптически сопряженной с серединой рабочего интервала дальностей, при этом вход призмы съюстирован с выходом лазера, выход с осью вращения зеркала, при этом второй фотоприемник с входной линзой установлен со стороны, противоположной входу призмы, а ось линзы параллельна оси входного объектива.
Положение и угол оптических клиньев выбраны из условия обеспечения наличия сигналов от обеих отверстий диафрагмы на первом фотоприемнике во всем диапазоне измерения дальности.
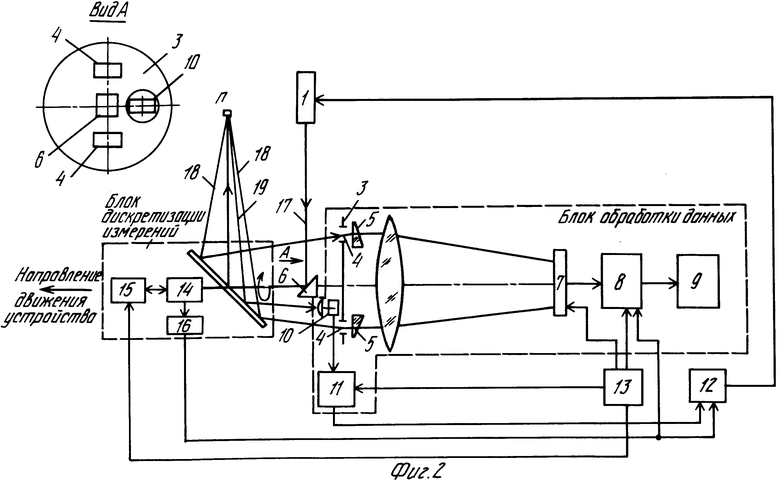
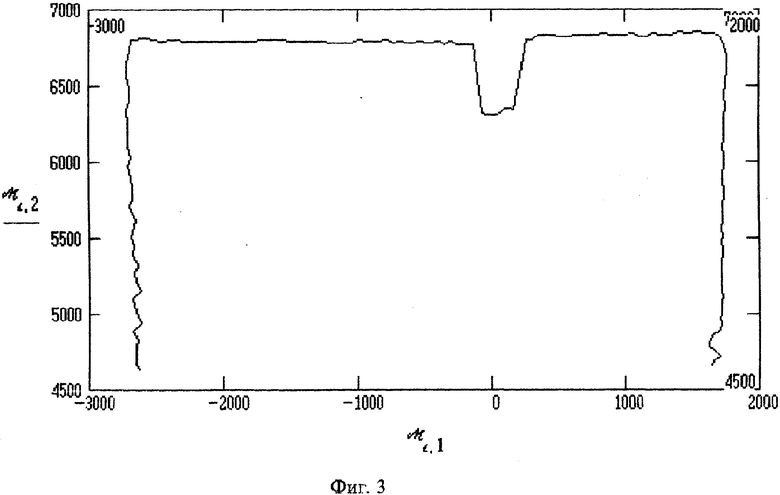
На фиг. 1 изображена схема, поясняющая принцип измерения дальности до поверхности профиля; на фиг. 2 устройство для построения профилей трехмерных объектов; на фиг. 3 результаты измерения одного плоского профиля, полученные с помощью описываемого устройства
На объекте (фиг. 1), до которого измеряют расстояние R, с помощью оптической системы 9 и отклоняющего элемента 6 формируют излучение лазера 1 в виде пятна Л, размеры и пропорции сторон которого зависят от рабочего диапазона дальностей. Из отраженного от объекта сигнала с помощью диафрагмы 3 с двумя отверстиями 4, расположенными на расстоянии b друг от друга, формируют два сигнала, которые пройдя каждый по идентичному пути через клинья 5 и соответствующие краевые зоны объектива 2, имеющего фокусное расстояние f', формируют на пространственно линейном фотоприемнике 7 два изображения 8 пятна Л на объекте. Фотоприемник 7 преобразует изображения 8 в два видеосигнала, временной интервал между которыми пропорционален расстоянию d на фотоприемнике 7 между отметками 8. Одновременно с помощью устройства 10 измеряют мощность третьего сигнала, равную по величине мощности первого и второго сигналов, и, если последняя выходит за верхнюю границу динамического диапазона, прерывают лазерный импульс. Поскольку время распространения излучения на расстояние нескольких метров составляет десятки наносекунд, тогда как лазер излучает импульсы микросекундной длительности, то регулировку длительности импульса и соответственно принимаемой мощности осуществляют одновременно с регистрацией принимаемого сигнала. Такая мгновенная регулировка мощности позволяет проводить измерения по объектам с очень большим диапазоном и высокой динамикой отражательных свойств.
Дальность R до объекта Л может быть рассчитана из соотношения (1).
Для получения значений коэффициентов k1 и k2 процесс калибровки осуществляют следующим образом. Рабочий диапазон дальности разбивают на m участков. На дальностях, определяемых из выражения Ri=Rmin+i•ΔR, где ΔR (Rmax-Rmin)/m, Rmin и Rmax соответственно минимальная и максимальная дальности рабочего диапазона, a i 1, m, вдоль оси оптической системы последовательно устанавливают плоский объект и величина hi фиксируется на дальности Ri. Полученную информацию с учетом выражения (1) и заранее известного значения коэффициента k3 обрабатывают с использованием метода наименьших квадратов и получают значения коэффициентов k1 и k2. При этом в значениях k2 и k2 автоматически учитываются конкретные значения параметров схемы f', b, Δf′, где Δf′ - положение плоскости фотоприемника 7 относительно фокальной плоскости оптической системы.
Например, при калибровке в диапазоне дальностей от Rmin=700 мм до Rmax 3500 мм для ΔR 100 мм, m 29, f' 110 мм, b 50 мм и величине Δf′, соответствующей фокусировке приемного объектива на дальность 1700 мм, были получены значения коэффициентов k1=1855 мм и k2 0,171 мм-1, при этом k3= 0,013 мм.
Устройство для построения профилей трехмерных объектов (фиг. 2) содержит вращающееся зеркало 14, отражающая поверхность которого установлена под углом 45o к оси вращения, расположенное на продолжении оптической оси входного объектива 2. Перед входным объективом 2 установлена диафрагма 3 с двумя отверстиями 4. Отверстия 4 предпочтительно расположены симметрично относительно оптической оси входного объектива 2. Призма 6 расположена также на оптической оси входного объектива и съюстирована с вращающимся зеркалом 14 и лазером 1 таким образом, чтобы луч 17 лазера распространялся вдоль оптической оси объектива 2 и отражался от вращающегося зеркала 14 в точке, совпадающей с осью его вращения. Оптические клинья 5 установлены между диафрагмой 3 с двумя отверстиями 4 и входным объективом 2. На схеме представлены блок стабилизации частоты вращения зеркала 15, блок синхронизации фазы вращения зеркала и запуска лазера в пачечном режиме 16, блок синхронизации 13, блок измерения мощности отраженного сигнала 11, блок регулировки длительности лазерного импульса 12, пространственно линейный фотоприемник 7, второй фотоприемник с входной линзой 10, блок формирования информации о дальности 8 и компьютер 8, соединенные указанным на схеме образом, а также 0-объект, координаты которого измеряются.
На виде А (фиг. 2) показано предпочтительное взаимное расположение отверстий 4 в диафрагме 3 призмы 6 и второго фотоприемника 10 с входной линзой.
Оптико-механическая часть устройства должна быть собрана на едином жестком основании. Вместо призмы может быть использовано любое перископическое устройство, решающее задачу выведения излучения лазера из устройства таким образом, чтобы обеспечить направление излучения вдоль оптической оси входного объектива. Если диафрагму с двумя симметричными отверстиями выполнить фотолитографическим способом на стеклянной подложке, то оптические клинья могут быть наклеены непосредственно на поверхность подложек. В качестве пространственно линейного фотоприемника может быть использована линейка ПЗС или фотодиодная линейка.
Способ с помощью устройства осуществляется следующим образом.
Блок синхронизации 13 вырабатывает опорную частоту и функциональные последовательности сигналов, управляющие режимами работы пространственно линейного фотоприемника 7, блока формирования информации о дальности 8, блока измерения мощности отраженного сигнала 11 и блока стабилизации частоты вращения зеркала 15, который обеспечивает фазировку частоты вращения зеркала 14 с частотой кадров фотоприемника 7.
Блок синхронизации фазы вращения зеркала и запуска лазера в пачечном режиме 16 формирует за каждый оборот зеркала 14 импульс, определяющий начало обзора или такт работы устройства. Положение импульса начала обзора также оказывается сфазированным с кадровой частотой приемника 7. Импульс начала обзора поступает на блок формирования информации о дальности 8, обеспечивая тактирование его работы. За время одного оборота вращающегося зеркала 14 формируется пачка импульсов запусков лазера 1, расположенная равномерно в интервале такта работы устройства, что позволяет в каждом кадре работы фотоприемника 7 сформировать один импульс лазера 1, сфазированный с частотой кадров приемника. Таким образом, за один оборот вращающегося зеркала формируется n импульсов лазера, расположенных равномерно во временном такте работы устройства, что при высокой стабильности частоты вращения зеркала обеспечивает возможность по номеру импульса лазера в пачке определить в данный момент угловое положение луча лазера в координатах устройства, а следовательно, и угловое положение лазерного пятна Л на объекте.
Сигнал лазера 18, рассеянный на объекте, отражается от вращающегося зеркала 14 и, пройдя через отверстия 4 диафрагмы 3, входной объектив 2 и клинья 5, в виде двух изображений пятна лазера Л на объекте поступает на вход пространственно линейного фотоприемника 7.
Блок формирования информации о дальности 8 по существу вырабатывает величину h, пропорциональную расстоянию d между двумя изображениями (фиг. 1). Сигнал с блока 8, содержащий информацию о значении величины h, поступает в компьютер 9, при этом номер кадра в такте работы устройства служит информацией об угловом положении вращающегося зеркала.
Одновременно в том же кадре работы устройства второй фотоприемник с входной линзой 10 регистрирует третий из разделенных сигналов 19, а блок 11 измеряет его мощность. В случае превышения последней верхней границы динамического диапазона фотоприемника 7 блок 11 вырабатывает соответствующий сигнал, посылаемый в блок регулировки длительности лазерного импульса 12, который вызывает прерывание импульса, уменьшая тем самым его энергию в текущем кадре работы устройства. Подобная процедура осуществляется в каждом кадре работы.
Компьютер 9, используя формулу (1) и определенные в процессе калибровки коэффициенты k1 и k2, а также заранее известное значение коэффициента k3, вычисляет положение подсвеченной точки объекта в данном кадре работы приемника в полярной системе координат и затем пересчитывает его в систему координат движущегося средства. Таких кадров за один оборот вращающегося зеркала получается n соответственно числу импульсов лазера в одной пачке, формируемой за один оборот зеркала 14, или, что одно и то же, число n равно числу кадров фотоприемника 7 за один оборот вращающегося зеркала 14.
Устройство, установленное на движущееся средство таким образом, чтобы плоскость вращения луча лазера 17 была перпендикулярна направлению движения, позволяет осуществлять непрерывную съемку профилей вдоль траектории движения.
Устройство испытано на стенде АО ПНП "Эталон", а также на вагоне-лаборатории Всесоюзного научно-исследовательского института железнодорожного транспорта. Получены следующие результаты:
Диапазон рабочих дальностей 0,7-3,5 м
Точность измерения дальности соответственно 2-25 мм
Точность измерения угловых координат в профиле < 0,2%
Время измерения координат в одной точке 65 мкс
Число точек измерения в одном профиле 500
Время измерения одного профиля 25 мс
Расстояние между профилями при движении со скоростью 20 км/ч 0,1 м
На фиг. 3 показаны результаты измерения плоского профиля, полученные при испытаниях с помощью описываемого устройства. Профиль состоял из элементов с различной отражательной способностью: зеленая масляная краска, побелка, струганное темное дерево. Размерность по осям X и Y соответствует миллиметрам, в точке X0 0 мм и Y0 4600 мм находилась ось вращения зеркала устройства.
Таким образом предложенное техническое решения позволило повысить:
скорость измерения одного двумерного профиля от 40 до 200 раз;
точность построения профиля в два с половиной раза за счет увеличения числа точек измерения в одном профиле с 200 до 500;
скорость построения профилей трехмерных объектов за счет возможности работы при высоких скоростях движения транспортного средства.
Применение предложенного технического решения по существу открывает новый класс приборов, которые позволяют проводить измерения с высокой частотой (десятки килогерц) в микросекундном режиме, в метровом диапазоне дальностей с миллиметровой (сантиметровой) точностью, а в сантиметровом диапазоне дальностей получить точность в несколько десятков микрометров.
Источники информации
1. SU, авт. св. N 1323852, кл. G 01 B 21/00, 1986.
2. Rilssderger K. Ein neues Verfahren Zur Vermessung des lichten Raumes von Eisentahn-Strecken. -"Eisenbahningenieur", 1980, 31, N 9, 387 388, 390 -391. УДК 625 114; 12Г108).
3. Profil 2000 for automatic profill meuzurement and independent analytical output processing Sacher F. "Large Rock Caverns: proc Int Symp Helsinki", 25-28, 1986, Vol, Oxford e.a. 1987, 1009-1016. ГПНТБ СССР. Железнодорожный транспорт, сводный том РЖ ВИНИТИ, N 5, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091711C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВОЕННОСТИ БАНКНОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2173886C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2650789C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2349929C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2016 |
|
RU2638580C1 |
Использование: радиофизика и лазерная локация, для контроля сооружений, сооружений метро, различных путепроводов, трубопроводов, в шахтах, горных разработках и др. Сущность изобретения: дискретное лазерное сканирование пространства в плоскости, перпендикулярной направлению лазера, с последующей регистрацией отраженного сигнала и определением дальности по каждой из точек дискретного сканирования, построение профилей объектов с учетом углового положения точек дискретного сканирования и скорости движения, при этом во время регистрации отраженный сигнал разделяют на три сигнала, два из них пространственно линейно преобразовывают в видеосигналы, временной интервал между которыми пропорционален дальности R до объекта, изменяют мощность третьего сигнала и при достижении ею верхней границы динамического диапазона ограничивают длительность лазерного импульса, а дальность R определяют по формуле R=k1/(1+k2k3h), где h - величина, пропорциональная временному интервалу между центрами световых отметок; k1, k2 - коэффициенты, определяемые в результате калибровки; k3 - коэффициент, связанный с масштабом пространственного линейного преобразования фотоприемника. Устройство для построения профилей трехмерных профилей содержит устанавливаемые на движущемся средстве импульсный лазер, блок синхронизации, блок регулировки длительности лазерного импульса, блок обработки данных, включающий входной объектив и последовательно соединенные первый фотоприемник, блок формирования информации о дальности и компьютер, а также второй фотоприемник с входной линзой и блок измерения мощности отраженного сигнала, блок дискретизации измерений, включающий вращающееся зеркало, блок стабилизации частоты вращения зеркала, блок синхронизации фазы вращения зеркала и запуска лазера в пачечном режиме, диафрагму с двумя отверстиями и оптически связанные с последними два оптических клина, при этом первый фотоприемник выполнен протяженным и дискретизированным. 2 с. и 4 з. п. ф-лы, 3 ил.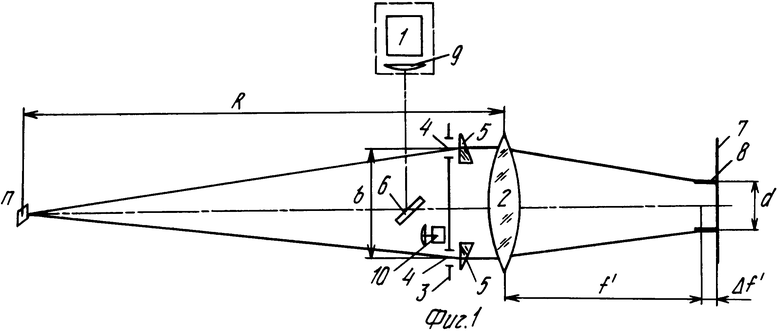
R k1/(1 + k2 • k3 • h),
где h величина, пропорциональная временному интервалу между центрами видеосигналов;
k1, k2 коэффициенты, определяемые в результате калибровки фотоприемника;
k3 коэффициент, связанный с масштабом пространственного линейного преобразования фотоприемника.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| "Large Rock Caverns: prog Int | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Oxford e.a., 1987, 1009-1016. | |||
