Изобретение относится к оптической локации и может использоваться для обнаружения и получения изображений оптических и оптоэлектронных объектов в лоцируемом объеме пространства.
Известно устройство обнаружения оптоэлектронных объектов, описанное в патенте RU 2129287, выбранное в качестве прототипа. Устройство содержит последовательно соединенные объектив, электронно-оптический преобразователь (ЭОП), блок затворных импульсов, выход которого подключен к входу ЭОП, фотоприемное устройство и видеоконтрольное устройство (монитор), частотно-импульсный лазер, модулятор и делитель кадровой частоты, подключенные соответствующим образом к синхрогенератору, блоку обработки видеосигнала и пульту управления, а также источники высокого напряжения.
Устройство обеспечивает получение изображения наблюдаемого объема пространства на экране монитора. Устройство также обеспечивает просмотр пространства по дальности путем взаимного перемещения стробов, поступающих на ЭОП с блока затворных импульсов, относительно импульсов запуска частотно-импульсного лазера, обнаружение оптического или оптико-электронного объекта (OO).
Если дальность до ОО соответствует временному положению строба, изображение ОО выглядит на экране монитора в виде яркой точки, мелькающей с частотой кодоимпульсной модуляции, что позволяет обнаружить ОО и осуществить привязку его положения относительно окружающей местности.
Недостатком данного устройства является достаточно большое время, затрачиваемое на поиск ОО при последовательном просмотре зондируемого пространства. Например, при поле зрения фотоприемника по азимуту 0,1 рад, длительности строба, эквивалентной 50 м, для просмотра пространства в секторе 1 рад × 1 км потребуется просмотреть (1/0,1)×(1000/50)=200 изображений на экране монитора на предмет наличия в нем изображения OO.
При минимальном времени реакции оператора на просмотр одного изображения 0,5...1 с суммарное время анализа может составить 100...200 с/рад×км.
Очевидно, что (1/0,01)×(1000/500)=(1/0,005)×(1000/1000)=200.
В приведенном выражении числа 0,01 и 0,005 можно рассматривать как ширину диаграммы по азимуту зондирующего лазера (в рад), а числа 500 и 1000 как глубину просматриваемой зоны пространства (в метрах).
Таким образом, если обнаружение ОО проводится методом последовательного визуального анализа изображений на экране монитора, то сужение диаграммы излучения в направлении просмотра (сопровождается увеличением плотности облучения пространства) при соответствующем увеличении глубины просмотра по дальности (сопровождается увеличением фоновой составляющей в видеосигнале, затрудняющей обнаружение) не дает выигрыша во времени (количество разовых объемов пространства не изменяется). Уменьшение времени обзора в этом случае возможно только за счет уменьшения времени анализа каждого изображения, которое в минимуме может составлять не менее одного кадра (0,04 с) на одно изображение. Таким образом, даже если процесс анализа автоматизирован, время анализа может быть сокращено только до 200×0,04=8 сек.
Произведем оценку возможности сокращения времени поиска и измерения положения OO по азимуту и дальности посредством зондирования сектора пространства (1 рад × 1 км) лазером с «ножевой» диаграммой излучения по азимуту (αл, рад), работающим на частоте (fл, Гц), превышающей частоту кадров телевизионного приемника.
Допустим, что значение αл=0,005 рад позволяет осуществлять просмотр пространства по глубине 1 км. При угловой скорости ˜60 угл. град/сек время сканирования пространства 1 рад × 1 км займет ˜1 сек. При этом при частоте зондирующего лазера fл=4 кГц за время смещения по азимуту на ширину луча (0,005 рад) - 5 мс данный объем пространства будет прозондирован девятнадцатью импульсами лазера, что обеспечит большую вероятность обнаружения ОО.
Технической задачей изобретения является уменьшение времени обнаружения и привязки положения ОО относительно окружающих предметов путем сокращения времени просмотра пространства, автоматизации процесса обнаружения ОО, запоминании направлений и дальностей, соответствующих обнаруженным ОО, детальный анализ на экране монитора изображений только тех объемов пространства, в которых обнаружены ОО.
Поставленная задача достигается в устройстве для обнаружения оптических и оптоэлектронных объектов, содержащем последовательно размещенные объектив с интерференционным светофильтром на λ1, электронно-оптический преобразователь (ЭОП) и фотоприемник с объективом на входе, выход которого подключен к первому входу блока обработки, видеоконтрольный блок, пульт управления и синхрогенератор, первый выход которого через последовательно соединенные делитель кадровой частоты и модулятор подключен к управляющему входу частотно-импульсного лазера на λ1, на выходе которого размещен первый объектив, при этом второй выход синхрогенератора через блок затворных импульсов соединен с управляющим входом ЭОП, третий выход подключен к второму входу фотоприемника с объективом на входе, четвертый выход подсоединен к второму входу модулятора, пятый выход соединен с вторым входом блока обработки, а вход синхронизатора соединен с пультом управления, в которое согласно изобретению, введены лазер с «ножевой» диаграммой излучения на λ2, на выходе которого размещен второй объектив, последовательно размещенные объектив с интерференционным светофильтром на λ2 и фотоприемник, выход которого через введенные последовательно соединенные блок выделения световозвратного сигнала обнаруживаемого объекта и схему И подсоединен к третьему входу блока обработки, а также формирователь импульсов запрета, выход которого подключен к второму входу схемы И, при этом входы формирователя импульсов запрета и лазера с ножевой диаграммой излучения на λ2 объединены и подсоединены к шестому выходу синхрогенератора, четвертый вход блока обработки соединен с введенным электронным компасом, а выход блока обработки подключен к входу видеоконтрольного блока.
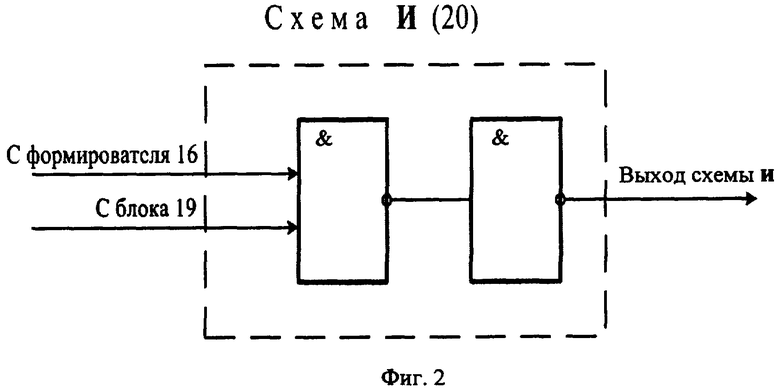
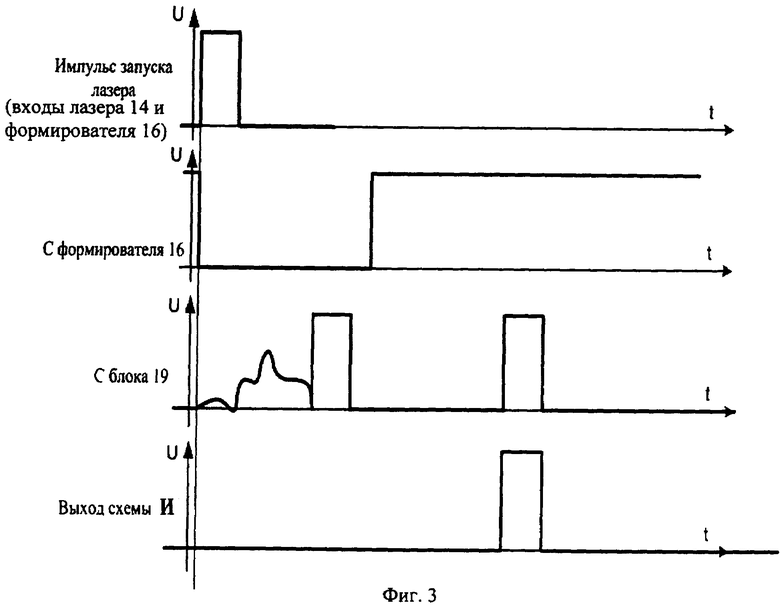
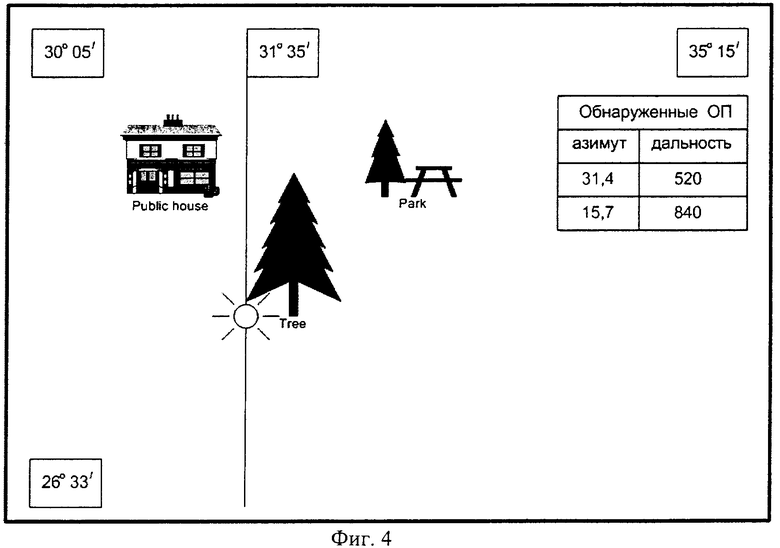
Изобретение поясняется чертежами. На фиг.1 приведена структурная электрическая схема устройства для обнаружения оптических и оптоэлектронных объектов; на фиг.2 - структурная электрическая схема схемы И; на фиг.3 - эпюры, поясняющие работу устройства; на фиг.4 изображен интерфейс на экране видеоконтрольного блока.
На фиг.1 обозначено: лоцируемый объем пространства 1; объектив 2 с интерференционным светофильтром на λ1; электронно-оптический преобразователь (ЭОП) 3; фотоприемник 4 с объективом на входе, выполненный телевизионным; блок обработки 5; видеоконтрольный блок 6; синхрогенератор 7; делитель 8 кадровой частоты; модулятор 9; импульсный лазер 10 на λ1; первый объектив 11; блок 12 затворных импульсов; пульт 13 управления; лазер 14 с «ножевой» диаграммой излучения на λ2; второй объектив 15; формирователь 16 импульсов запрета; объектив 17 с интерференционным светофильтром на λ2; фотоприемник 18; блок 19 выделения световозвратного сигнала обнаруживаемого объекта; схема И 20; электронный компас 21.
Устройство для обнаружения оптических и оптоэлектронных объектов работает следующим образом.
Поле зрения фотоприемника 4 (объектив 2, ЭОП 3) и поле подсвета импульсным лазером 10 на λ1 посредством первого объектива 11 пространственно согласованы, т.е. оптические импульсные сигналы лазера 10 на λ1 постоянно присутствуют в поле обзора фотоприемника 4, удаляясь от него со скоростью света.
Отраженные импульсные оптические сигналы от предметов в поле зрения фотоприемника 4 и оптические сигналы фона, непрерывные во времени, в спектральной полосе частот, определяемой интерференционным светофильтром на λ1, формируют посредством объектива 2 непрерывные во времени и импульсные оптические изображения на фотокатоде ЭОПа 3, который постоянно закрыт и открывается по сигналу на выходе блока 12 затворных импульсов, определяющего временную задержку момента открывания ЭОПа 3 (дальность) и время нахождения его в открытом состоянии (глубину по дальности).
Если дальность до ОО соответствует временному положению открытого состояния ЭОПа 3, то осуществляется усиление световозвратного сигнала от ОО с сохранением его пространственного положения на входе ЭОПа 3, преобразование изображения лоцируемого объема 1 пространства в телевизионный сигнал фотоприемником 4 и наблюдение соответствующего изображения видеосигнала с отметкой от ОО на экране видеоконтрольного блока 6. Наличие в поле зрения фотоприемника 4 постоянных малоразмерных источников света может привести к наличию сигналов, идентичных по виду сигналам от ОО. Использование в указанном известном устройстве кодоимпульсной модуляции лазерных импульсов, например формирование пачек зондирующих сигналов с частотой ниже кадровой, обеспечивает режим мерцания отметки сигнала ОО на экране видеоконтрольного блока 6 при отсутствии мерцания у других ярких объектов. При отсутствии мерцающего сигнала от ОО в изображении некоторого выделенного объема пространства в известном устройстве осуществляется последовательный просмотр выделяемых объемов пространства по дальностям с шагом по глубине, эквивалентной длительности затворных импульсов блока 12. Как было показано выше это требует значительного времени поиска ОО.
В данном устройстве лоцируемый объем 1 пространства дополнительно облучается импульсным излучением лазера 14 с «ножевой» диаграммой излучения на λ2 через второй объектив 15 с частотой следования импульсов выше кадровой частоты.
Отраженные сигналы с длиной волны λ2 через объектив 17 с интерференционным светофильтром на λ2 поступают на фотоприемник 18, который постоянно открыт, и преобразуются в напряжение, содержащее фоновую, диффузно-отраженную и световозвратную (если в зоне подсвета лазером 14 окажется OO) компоненты.
Особенность световозвратной составляющей OO состоит в значительно большей интенсивности сигнала ее по сравнению с диффузной составляющей, поступившей на фотоприемник 18 с той же дальности, где расположен ОО, т.е. в тот же момент времени. Фоновая составляющая ослабляется интерференционным светофильтром на λ2 объектива 17 тем сильнее, чем уже полоса светофильтра, при этом она является сравнительно медленно изменяющейся во времени величиной для выбранного направления. Эта особенность используется в блоке 19 выделения световозвратного сигнала OO для компенсации фоновой составляющей вычитанием отфильтрованной узкополосной составляющей сигнала фотоприемника 18 с последующей пороговой обработкой разностного сигнала.
Учитывая, что интенсивности диффузной составляющей в сигнале для ближней зоны могут оказаться больше интенсивностей световозвратного сигнала от OO с более удаленных расстояний (при длительностях их того же порядка), на выходе блока 19 могут возникнуть ложные сигналы помех (фиг.3).
Задача формирователя 16 импульсов запрета сформировать такие импульсы, которые не позволят появиться импульсам помех на выходе схемы И 20, пропуская сигналы OO, подаваемые далее на блок обработки 5, где вычисляется и запоминается код дальности OO (длительность временного интервала между импульсом запуска лазера 14 и импульсом на выходе схемы И 20) (фиг.3). В блоке обработки 5 запоминаются также значения кода азимута в соответствии с выходным сигналом электронного компаса 21 на момент поступления на блок обработки 5 импульса со схемы И 20.
Учитывая, что угловая скорость сканирования невелика (см. числовой пример, приведенный выше), то, при наличии сигнала OO в анализируемом направлении, будет оцифровано несколько значений временных интервалов, соответствующих одному и тому же OO. Целесообразно в этом случае в блоке обработки 5 запоминать усредненное значение временного интервала.
Может оказаться, что в пределах одного направления от устройства располагаются несколько OO. Блок обработки 5 должен позволять формирование кодов дальности для всех OO и их запоминать.
Дальнейший анализ пространства производится по телевизионному изображению на экране видеоконтрольного блока 6 следующим образом.
Блоком обработки 5 формируется интерфейс (см. фиг.4), замешиваемый в телевизионный сигнал фотоприемника 4.
Работа устройства с учетом вышеизложенного алгоритмически разбивается по времени на два этапа.
На первом этапе, обеспечиваемом работой блоков 14, 15, 16, 17, 18, 19, 20, 21, осуществляется: «просмотр» анализируемого пространства путем сканирования устройства в заданном секторе по азимуту; автоматическое выделение световозвратных сигналов OO, подсвеченных «ножевой» диаграммой зондирующего лазера 14 с длиной волны λ2; измерение соответствующих задержек выделенных сигналов ОО относительно зондирующих импульсов лазера 10 (дальности) и запоминание соответствующих кодов; запоминание направлений (кода азимута) обнаруженных ОО; формирование интерфейса на экране видеоконтрольного блока 6 с запомненной информацией об ОО.
Как было описано выше, при достаточно высокой частоте оптических импульсов лазера 14 на λ2 и автоматизации процесса время «просмотра» пространства определяется практически допустимой скоростью сканирования устройством по азимуту.
На втором этапе, обеспечиваемом работой блоков 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 с участием оператора, задача которого далее состоит в последовательном просмотре изображений пространства только тех объемов пространства, которые соответствуют запомненным направлениям и дальностям OO. Оператор с пульта управления устанавливает и анализирует на экране видеоконтрольного блока 6 последовательно эти варианты. Блок обработки 5 должен позволять осуществление обратного преобразования - запомненное значение кода дальности OO в длительность интервала между импульсом запуска лазера 10 на λ1 и передним фронтом строба на выходе блока 12 с учетом уменьшения интервала на длительность импульса лазера 10 на λ1.
Просмотр изображений на экране видеоконтрольного блока 6 позволит обнаружить OO на фоне изображений окружающих предметов и подстилающей поверхности и уточнить количественно его пространственное положение, пользуясь программным интерфейсом блока обработки 5, например, совмещая линию азимута на центре отметки изображения OO и считывая координаты соответствующего направления. Модулятор 9 позволяет создавать режим мерцания отметки OO на экране видеоконтрольного блока 6.
Разные длины волн лазеров λ1 и λ2 позволяют избежать перекрестных помех при одновременной совместной работе лазеров.
Пульт управления 13 позволяет оператору управлять режимами работы устройства, наблюдая на экране видеоконтрольного блока 6 установленные режимы или их параметры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СРЕДСТВ ОПТИЧЕСКОГО И ОПТОЭЛЕКТРОННОГО ТИПА | 1998 |
|
RU2133485C1 |
| Активно-импульсный прибор наблюдения | 2021 |
|
RU2757559C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА НАБЛЮДЕНИЯ ОБЪЕКТА | 1991 |
|
RU2014747C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СПОСОБ ФОРМИРОВАНИЯ СПЕКТРОЗОНАЛЬНЫХ ВИДЕОСИГНАЛОВ | 2015 |
|
RU2604898C1 |
Изобретение относится к оптической локации и может быть использовано для обнаружения и получения изображений оптических и оптоэлектронных объектов (OO) в зондируемом объеме пространства. Техническим результатом изобретения является автоматизация процесса и уменьшение времени обнаружения и привязки положения OO относительно окружающих предметов. Устройство содержит объектив 2 с интерференционным светофильтром на λ1, электронно-оптический преобразователь (ЭОП) 3, фотоприемник 4 с объективом на входе, выполненный телевизионным, блок обработки 5, видеоконтрольный блок 6, синхрогенератор 7, делитель 8 кадровой частоты, модулятор 9, импульсный лазер 10 на λ1, первый объектив 11, блок 12 затворных импульсов, пульт 13 управления, лазер 14 с «ножевой» диаграммой излучения на λ2, второй объектив 15, формирователь 16 импульсов запрета, объектив 17 с интерференционным светофильтром на λ2, фотоприемник 18, блок 19 выделения световозвратного сигнала обнаруживаемого объекта, схему И 20, электронный компас 21. 4 ил.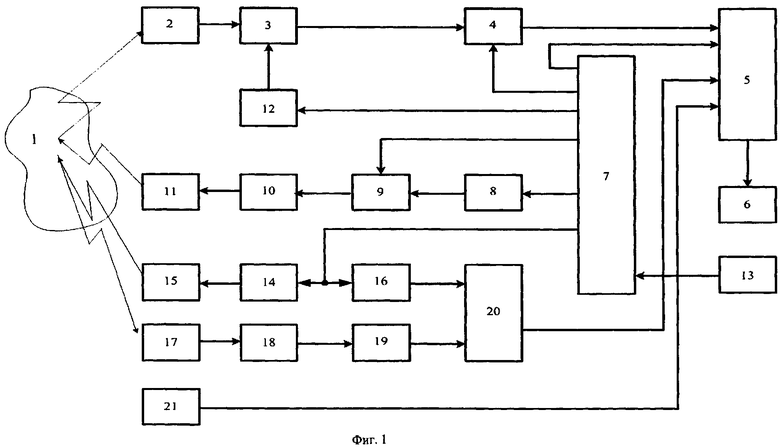
Устройство для обнаружения оптических и оптоэлектронных объектов, содержащее последовательно размещенные объектив с интерференционным светофильтром на λ1, электронно-оптический преобразователь (ЭОП) и фотоприемник с объективом на входе, выход которого подключен к первому входу блока обработки, видеоконтрольный блок, пульт управления и синхрогенератор, первый выход которого через последовательно соединенные делитель кадровой частоты и модулятор подключен к управляющему входу частотно-импульсного лазера на λ1, на выходе которого размещен первый объектив, при этом второй выход синхрогенератора через блок затворных импульсов соединен с управляющим входом ЭОП, третий выход подключен к второму входу фотоприемника с объективом на входе, четвертый выход подсоединен к второму входу модулятора, пятый выход соединен с вторым входом блока обработки, а вход синхронизатора соединен с пультом управления, отличающееся тем, что в него введены лазер с «ножевой» диаграммой излучения на λ2, на выходе которого размещен второй объектив, последовательно размещенные объектив с интерференционным светофильтром на λ2 и фотоприемник, выход которого через введенные последовательно соединенные блок выделения световозвратного сигнала обнаруживаемого объекта и схему И подсоединен к третьему входу блока обработки, а также формирователь импульсов запрета, выход которого подключен к второму входу схемы И, при этом входы формирователя импульсов запрета и лазера с ножевой диаграммой излучения на λ2 объединены и подсоединены к шестому выходу синхрогенератора, четвертый вход блока обработки соединен с введенным электронным компасом, а выход блока обработки подключен к входу видеоконтрольного блока.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1980 |
|
SU944437A1 |
| Лазерная локационная система | 1991 |
|
SU1810864A1 |
| US 3899250 A, 19.12.1989. | |||

