Изобретение относится к области радиофизики и лазерной локации и может быть использовано для измерения дальности до объектов, поверхность которых имеет произвольную в очень широких пределах структуру и отражательную способность. Достигаемая при этом точность соответствует нескольким миллиметрам в метровом и субметровом диапазоне дальностей и нескольким десяткам микрометров в сантиметровом диапазоне дальностей, причем измерения проводятся в микросекундном режиме и с высокой частотой.
Основным направлением в разработке и совершенствовании способов измерения дальности является повышение точности и скорости проведения измерений по объектам с произвольной структурой поверхности, используя для этого по возможности наиболее простые технические решения.
Известен способ измерения дальности, реализованный в импульсном лазерном дальномере [1] который обычно применяется для измерения расстояний свыше нескольких метров. В этом способе ошибка измерения в основном вызвана нестабильностью амплитуды и формы отраженного сигнала, возникающей при работе по объектам с произвольной структурой поверхности. Для получения точности измерения менее 1 см длительность зондирующего и отраженного импульсов в этом случае должна лежать в субпикосекундной области, что приводит к чрезвычайному усложнению аппаратуры.
Известен способ измерения дальности, реализованный в фазовом дальномере [2] При работе дальномера по подвижному объекту с неоднородной структурой поверхности этот способ не обеспечивает требуемой точности из-за паразитной амплитудной модуляции отраженного излучения.
Известен способ измерения дальности [3] основанный на приеме рассеянного объектом излучения в двух точках одной плоскости, формирования двух изображений во второй плоскости, параллельной первой, оптическом совмещении этих изображений, при этом дальность до объекта пропорциональна величине перемещения элемента, совмещающего два изображения. В этом способе для измерения дальности затрачивается много времени, точность измерения в значительной мере зависит от квалификации оператора, выполняющего измерения, а главное отсутствует возможность фотоэлектрической автоматической обработки принимаемых изображений.
Наиболее близким аналогом по количеству сходных признаков является способ измерения дальности, реализованный в паралактическом лазерном дальномере [4] заключающийся в подсвете объекта лазерным импульсом с последующей регистрацией отраженного сигнала, анализе пространственного положения отраженного сигнала путем его преобразования в видеосигнал и анализа временного положения последнего. При таком способе измерения дальности, однако взаимные уводы оптических осей любого из каналов (лазера или приемной оптики) приводят к возникновению дополнительных труднопрогнозируемых ошибок измерения дальности до объекта. Кроме того, любые эффекты, искажающие изображение лазерного пятна на фотодетекторе за счет, например, существенно неоднородной структуры поверхности объекта в пределах пятна подсвета также приводят к снижению точности измерений.
Технический результат, обеспечиваемый изобретением, возможность использования эффекта, связанного с одномоментным опросом одной точки с разнесенной в пространстве базы для работы на высокой частоте, в микросекундном режиме в метровом и сантиметровом диапазонах дальностей.
Сущность изобретения заключается в достижении упомянутого технического результата в способе измерения дальности, предусматривающем подсвет объекта лазерным импульсом с последующей регистрацией отраженного сигнала, анализ пространственного положения отраженного сигнала путем его преобразования в видеосигнал и анализ временного положения последнего, при этом во время регистрации отраженный сигнал пространственно разделяют на три сигнала, одномоментно и пространственно линейно преобразовывают два из них в видеосигналы, временной интервал между которыми пропорционален дальности R до объекта, измеряют мощность третьего сигнала и при достижении ею верхней границы динамического диапазона ограничивают длительность лазерного импульса, при этом дальность R определяют по формуле
R=k1/(1+k2•k3•h), (1)
где h величина, пропорциональная временному интервалу между центрами световых отметок;
k1, k2 коэффициенты, определяемые в результате калибровки;
k3 коэффициент, связанный с масштабом пространственного линейного преобразования.
Отраженный сигнал разделяют на три одинаковых по мощности и форме сигнала, а пространственное линейное преобразование осуществляют вдоль линии, соединяющей центры первого и второго разделенных сигналов.
Сущность изобретения заключается в достижении упомянутого технического результата в устройстве измерения дальности, содержащем импульсный лазер, блок обработки данных, включающий входной объектив и последовательно соединенные первый фотоприемник, блок формирования информации о дальности и компьютер, блок синхронизации, соединенный с лазером, первым фотоприемником и блоком формирования информации о дальности, при этом в устройство введен блок регулировки длительности лазерного импульса, первый вход которого соединен с выходом блока синхронизации, а выход соединен с входом лазера. Блок обработки данных дополнительно включает последовательно соединенные второй фотоприемник с входной линзой, блок измерения мощности отраженного сигнала, выход которого соединен с вторым входом блока регулировки длительности лазерного импульса, второй вход соединен с выходом блока синхронизации, и диафрагму с двумя отверстиями, оптически связанные с последними два оптических клина, а первый фотоприемник выполнен протяженным и дискретизированным.
Отверстия в диафрагме выполнены одинаковыми и расположены симметрично относительно центра входного объектива, перед диафрагмой по оси входного объектива установлена призма, оптические клинья выполнены идентичными и установлены перед входным объективом напротив отверстий экрана, а протяженный дискретизированный фотоприемник установлен вдоль линии, соединяющей центры световых отметок, формируемых отверстиями диафрагмы в плоскости изображений объектива, оптически сопряженной с серединой рабочего интервала дальностей, причем вход призмы съюстирован с выходом лазера, а выход с оптической осью входного объектива, при этом второй фотоприемник с входной линзой установлен со стороны, противоположной входу призмы, а ось линзы параллельна оси входного объектива.
Положение и угол оптических клиньев выбраны из условия обеспечения наличия сигналов от обеих отверстий диафрагмы на первом фотоприемнике во всем диапазоне измерения дальности.
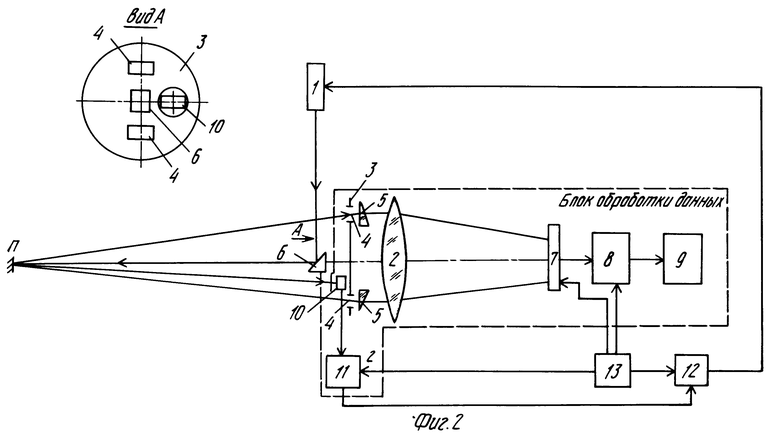
На фиг. 1 изображена схема, поясняющая способ измерения дальности; на фиг.2 устройство для измерения дальности.
Способ осуществляют следующим образом (фиг.1).
На объекте, до которого измеряют расстояние R, с помощью оптической системы 9 и отклоняющего элемента 6 формируют излучение лазера 1 в виде пятна Л, размеры и пропорции сторон которого зависят от рабочего диапазона дальностей. Из отраженного от объекта сигнала с помощью диафрагмы 3 с двумя отверстиями 4, расположенными на расстоянии b друг от друга, формируют два сигнала, которые, пройдя каждый по идентичному пути через клинья 5 и соответствующие краевые зоны объектива 2, имеющего фокусное расстояние f', формируют на пространственно линейном фотоприемнике 7 два изображения 8 пятна Л на объекте. Фотоприемник 7 преобразует изображения 8 в два видеосигнала, временной интервал между которыми пропорционален расстоянию d на фотоприемнике 7 между отметками 8. Одновременно с помощью устройства 10 измеряют мощность третьего сигнала, равную по величине мощности первого и второго сигналов, и, если последняя выходит за верхнюю границу динамического диапазона, прерывают лазерный импульс. Поскольку время распространения излучения на расстоянии нескольких метров составляет десятки наносекунд, тогда как лазер излучает импульсы микросекундной длительности, то регулировку длительности импульса и соответственно принимаемой мощности осуществляют одновременно с регистрацией принимаемого сигнала. Такая мгновенная регулировка мощности позволяет проводить измерения по объектам с очень большим диапазоном и высокой динамикой отражательных свойств.
Дальность R до объекта Л может быть рассчитана из соотношения (1).
Для получения значений коэффициентов k1 и k2 процесс калибровки осуществляют следующим образом.
Рабочий диапазон дальностей разбивают на m участков. На дальностях, определяемых из выражения Ri=Rmin+i•ΔR, где ΔR (Rmax-Rmin)/m, Rmin и Rmax соответственно минимальная и максимальная дальности рабочего диапазона, а i=1, m, вдоль оси оптической системы последовательно устанавливают плоский объект и фиксируется величина hi на дальности Ri. Полученную информацию с учетом (1) и заранее известного значения коэффициента k3 обрабатывают с использованием метода наименьших квадратов, получают значения коэффициентов k1 и k2. При этом в значениях k1 и k2 автоматически учитываются конкретные значения параметров схемы f', b, Δf′, где Δf′ положение плоскости фотоприемника 7 относительно фокальной плоскости оптической системы.
Например, при калибровке в диапазоне дальностей от Rmin=700 мм до Rmax= 3500 мм для ΔR 100 мм, m=29, f'=110 мм, b=50 мм и величине Δf′, соответствующей фокусировке приемного объектива на дальность 1700 мм, были получены значения коэффициентов k1=1855,0 мм и k2=0,171 мм-1, при этом k3=0,013 мм.
Устройство для измерения дальности (фиг.2) содержит лазер 1, диафрагму 3 с двумя отверстиями 4, установленную перед входным объективом 2. Предпочтительно отверстия 4 расположены симметрично относительно оптической оси входного объектива 2. Возможно несимметричное расположение отверстий 4, что затруднит ориентацию пространственно линейного приемника 7 и усложнит процедуру расчета дальности. Призма 6 расположена на оптической оси входного объектива 2, оптические клинья 5 установлены между диафрагмой 3 с двумя отверстиями 4 и входным объективом 2. На фиг.2 представлены также пространственно линейный фотоприемник 7, блок синхронизации 13, блок формирования информации о дальности 8, второй фотоприемник 10 с входной линзой, блок измерения мощности отраженного сигнала 11, блок регулировки длительности лазерного импульса 12 и компьютер 9, соединенные указанным на фиг.2 образом, а также Л-объект, дальность до которого измеряется.
На виде А (фиг.2) показано предпочтительное взаимное расположение отверстий 4 в диафрагме 3, призмы 6 и второго фотоприемника 10 с входной линзой.
Оптико-механическая часть устройства должна быть собрана на едином жестком основании. Вместо призмы может быть использовано любое перископическое устройство, решающее задачу выведения излучения лазера из устройства таким образом, чтобы обеспечить направление излучения вдоль оптической оси входного объектива. Если диафрагму с двумя симметричными отверстиями выполнить фотолитографическим способом на стеклянной подложке, то оптические клинья могут быть наклеены непосредственно на поверхность подложки. В качестве пространственно линейного фотоприемника может быть использована линейка ПЗС или фотодиодная линейка.
Способ с помощью устройства осуществляют следующим образом.
Блок синхронизации 13 вырабатывает опорную частоту и функциональные последовательности сигналов, управляющие режимом работы пространственно линейного фотоприемника 7, блока формирования информации о дальности 8, блока измерения мощности отраженного сигнала 11 и через блок регулировки длительности лазерного импульса 12 лазера 1, что позволяет в каждом кадре работы фотоприемника 7 сформировать один импульс лазера 1 определенной длительности, сфазированный с частотой кадров приемника 7. Сигнал лазера 1, отраженный от объекта Л, пройдя через отверстия 4 диафрагмы 3, клинья 5 и входной объектив 2, в виде двух изображений пятна лазера на объекте поступает на вход пространственно линейного фотоприемника 7, где преобразуется в два видеосигнала, расстояние d между которыми представляется в блоке формирования информации о дальности 8 в виде цифрового кода h. Дальность до объекта в точке Л рассчитывается с использованием выражения (1).
Одновременно часть отраженного сигнала поступает через входную линзу на второй фотоприемник 10, связанный с блоком измерения мощности отраженного сигнала 11, где в случае превышения последней верхней границы динамического диапазона вырабатывается соответствующий сигнал, посылаемый в блок регулировки длительности лазерного импульса, который вызывает прерывание импульса. Тем самым уменьшается энергия лазерного импульса в текущем кадре работы устройства. Подобная процедура осуществляется в каждом кадре работы.
Два варианта устройства (для различных диапазонов дальностей) были испытаны на вагоне-лаборатории Всесоюзного научно-исследовательского института железнодорожного транспорта, а также на стенде АО ПНП "Этанол". Получены следующие результаты:
Первый вариант
Диапазон рабочих дальностей 0,7-3,5 м
Точность измерения дальности 2-25 мм
Время измерения дальности 65 мкс
Частота выполнения замеров дальности 15 кГц
Второй вариант
Диапазон рабочих дальностей 58-62 мм
Точность измерения дальности ≈ 25 мкм
Время измерения дальности 65 мкс
Частота выполнения замеров дальности 15 кГц
Предложенное техническое решение по существу открывает новую технологию, которая позволяет проводить измерения с высокой частотой (десятки килогерц), в микросекундном режиме, в метровом и субметровом диапазоне дальностей с миллиметровой (сантиметровой) точностью, а в сантиметровом диапазоне дальностей с точностью в несколько десятков микрометров.
Источники информации
1. Байбародин Ю. В. Волков В.А. Вялов В.К. и др. Авиационные системы информации оптического диапазона. М. Машиностроение, 1985.
2. Волконский В.Б. Высокоточные лазерные светодальномеры для геофизики, гидротехники и машиностроения. Труды ГОИ, 1985, т.58, N 192.
3. Грейм И.А. Оптические дальномеры и высотомеры геометрического типа. М. Недра, 1971.
4. Меркишин Г.В. Многооконные оптико-электронные датчики линейных размеров. М. Радио и связь, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВОЕННОСТИ БАНКНОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2173886C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ КООРДИНАТ | 2008 |
|
RU2357270C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |
| ПЕЛЕНГАТОР ОПТИЧЕСКОГО ДИАПАЗОНА | 2008 |
|
RU2357271C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2349929C2 |
| УНИВЕРСАЛЬНАЯ УСТАНОВКА ДЛЯ ПРОВЕРКИ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2017 |
|
RU2678259C2 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
Использование: радиофизика и лазерная локация, для измерения дальности до объектов, поверхность которых имеет произвольную в очень широких пределах структуру и отражательную способность. Способ измерения дальности предусматривает подсвет объекта лазерным импульсом. При регистрации отраженный сигнал пространственно разделяют на три сигнала, пространственно линейно преобразовывают два из них в видеосигналы, временной интервал между которыми пропорционален дальности R до объекта, измеряют мощность третьего сигнала и при достижении ею верхней границы динамического диапазона ограничивают длительность лазерного импульса, при этом дальность R определяют по формуле R= k1/(1+k2•k3•h), где h - величина, пропорциональная временному интервалу между центрами видеосигналов; k1, k2 - коэффициенты, определяемые в результате калибровки; k3 - коэффициент, связанный с масштабом пространственного линейного преобразования фотоприемника. Устройство измерения дальности содержит импульсный лазер, блок синхронизации, блок регулировки длительности лазерного импульса, блок обработки данных, включающий входной объектив и последовательно соединенные первый фотоприемник, блок формирования информации о дальности и компьютер, а также второй фотоприемник с входной линзой, блок измерения мощности отраженного сигнала и диафрагму с двумя отверстиями, оптически связанные с последними два оптических клина, а первый фотоприемник выполнен протяженным и дискретизированным. 2 с. и 4 з.п. ф-лы, 2 ил.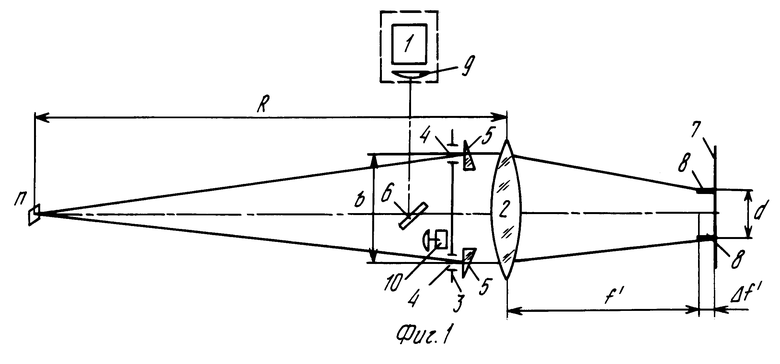
R k1/(1 + k2k3h),
где h величина, пропорциональная временному интервалу между центрами видеосигналов;
k1, k2 коэффициенты, определяемые в результате калибровки фотоприемника;
k3 коэффициент, связанный с масштабом пространственного линейного преобразования фотоприемника.
| Г.В.Меркишин | |||
| Многооконные оптико-электронные датчики линейных размеров.- М.: Радио и связь, 1986, с.77. |
