Изобретение относится к транспортному машиностроению и, в частности, к рулевому управлению автомобиля.
Известно рулевое управление транспортного средства, содержащее рулевой механизм, рулевой вал с колесом, электродвигатель и датчики скорости и крутящего момента, а также другие электронные и электрические устройства (см. А.С. СССР №1539115, МКЛ В 62 D 5/04, опубликованное 30.01.1990 г.).
Недостатком данного технического решения является применение дополнительных устройств и приборов, а именно датчиков положения и (или) скорости вращения ротора электродвигателя, для синхронизации его с вращением рулевого вала, что несомненно ведет к усложнению и удорожанию конструкции.
Кроме того, электродвигатель кинематически связан в таких конструкциях непосредственно с рулевым валом, а не с рулевым механизмом, что дополнительно нагружает рулевой вал, и без того находящийся в напряженном состоянии.
Известно рулевое управление транспортного средства, принятое в качестве прототипа, в котором содержатся рулевое колесо с рулевым валом и электрическим усилителем крутящего момента. В состав последнего включен электродвигатель с датчиком крутящего момента. При этом рулевое колесо кинематически связано с валом электродвигателя и рулевым механизмом, а датчик крутящего момента выполнен как часть рулевого вала. Устройство снабжено также блоком управления, обеспечивающим быстродействие электрического усилителя рулевого управления (см. патент РФ №2157327, МКЛ В 62 D 5/04, опубл. 10.10.2000 г.).
Недостатком известного устройства является то, что датчик крутящего момента не обеспечивает в автоматическом режиме вращение вала электродвигателя строго с той же угловой скоростью, что и рулевой вал, т.е. не обеспечивает их необходимую степень синхронизации. Поэтому чтобы решить проблему синхронизации вращения валов рулевого колеса и исполнительного электродвигателя, могут дополнительно применяться датчики скорости вращения вала электродвигателя (см. патент США, НКИ 74-388, №4660671, опубл. 28.04.1987), что ведет к усложнению и повышению стоимости конструкции.
Техническими задачами, на решение которых направлено настоящее изобретение, являются снижение усилий на рулевом колесе, которые прикладывает водитель при повороте автомобиля и обеспечение большей степени синхронного вращения рулевого вала и вала исполнительного электродвигателя.
Решение указанных технических задач достигается тем, что в предложенной системе рулевого управления транспортного средства, содержащей рулевое колесо, соединенное с рулевым валом, электрический усилитель крутящего момента, в состав которого входят датчик крутящего момента и исполнительный электродвигатель, и блок управления с подключенными к нему датчиками скорости и крутящего момента, при этом рулевой вал кинематически связан с рулевым механизмом посредством одного передаточного звена, а датчик крутящего момента совмещен с рулевым валом, согласно изобретению рулевой механизм снабжен вторым передаточным звеном, а датчик крутящего момента выполнен в виде взаимодействующих между собой через электромагнитные обмотки синхронизации сельсина-датчика и сельсина-приемника, при этом с рулевым валом совмещен сельсин-датчик, а сельсин-приемник установлен с возможностью взаимодействия его электромагнитной обмотки возбуждения с электромагнитной обмоткой возбуждения исполнительного электродвигателя, выходной вал которого кинематически связан посредством второго передаточного звена с рулевым механизмом.
В качестве варианта в системе рулевого управления исполнительный электродвигатель выполнен асинхронным двухфазным переменного тока.
Предлагаемая конструкция рулевого управления представляет собой систему с двумя каналами передачи усилия на рулевой механизм, один из которых - стандартный: от рулевого колеса через рулевой вал и первое передаточное звено - на рулевой механизм, а второй канал организован дополнительно к первому: от рулевого колеса через рулевой вал и сельсинную связь к исполнительному электродвигателю и второе передаточное звено также на рулевой механизм. Причем исполнительный электродвигатель имеет самостоятельную связь с рулевым механизмом. При необходимости осуществления поворотов с большими угловыми скоростями и, следовательно, с большими усилиями к работе дополнительно подключается второй канал воздействия на рулевой механизм со стороны исполнительного электродвигателя, что позволяет в значительной степени снизить потребные мускульные усилия водителя. При этом наличие сельсинной связи в силу ее свойств позволяет обеспечить синхронизацию вращения рулевого вала и вала исполнительного электродвигателя без применения дополнительных датчиков положения.
Изобретение поясняется чертежами.
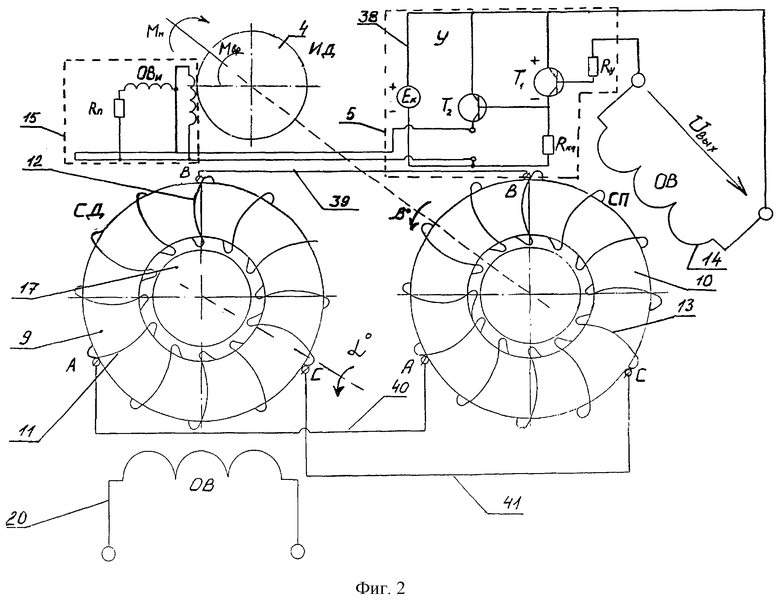
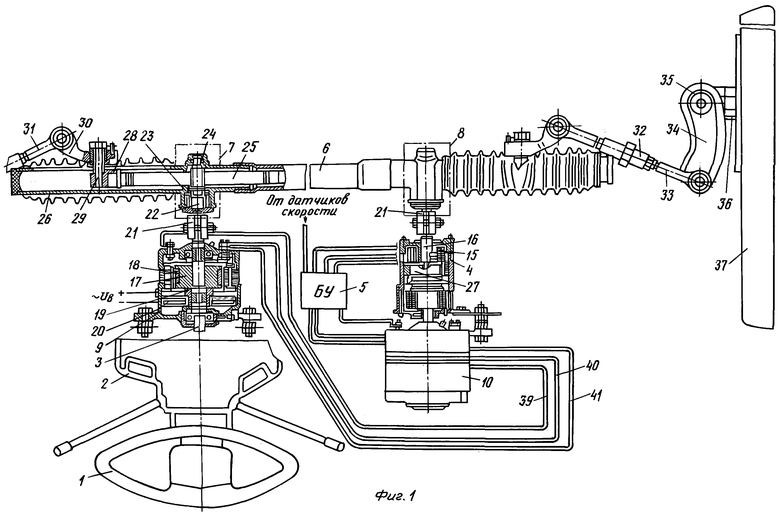
На фиг.1 представлен общий вид адаптивной системы рулевого управления транспортного средства в плане. На фиг.2 представлена принципиальная схема электрического усилителя момента в рулевом управлении транспортного средства.
На чертежах использованы следующие обозначения:
А, В, С - фазы (лучи) трехфазной обмотки синхронизации;
OB - обмотка возбуждения сельсина;
СД - сельсин-датчик;
СП - сельсин-приемник;
У - усилитель мощности;
ИД - исполнительный электродвигатель;
OВИ - обмотка возбуждения исполнительного электродвигателя;
МН - момент нагрузки;
МВР - вращающий момент;
RП - пусковое сопротивление;
α, β - углы поворота сельсина-датчика и сельсина-приемника соответственно;
UВ - напряжение возбуждения;
Т1, Т2 - транзисторы;
ЕК - дополнительный источник питания электронного усилителя мощности;
RK1, Ry - резисторы;
БУ - блок управления;
Uвых - выходное напряжение.
Адаптивная система рулевого управления транспортного средства содержит рулевое колесо 1, установленное на рулевой колонке 2 и соединенное с рулевым валом 3, электрический усилитель крутящего момента (не обозначен), в состав которого входят датчик крутящего момента (не обозначен) и исполнительный электродвигатель 4. В системе предусмотрен блок 5 управления, к которому подключены датчики скорости движения транспортного средства (не показаны) и крутящего момента. При этом рулевой вал 3 кинематически связан с рулевым механизмом 6 посредством одного передаточного звена 7. Причем рулевой механизм 6 снабжен вторым передаточным звеном 8, а датчик крутящего момента совмещен с рулевым валом 3 и выполнен в виде сельсина-датчика 9 и сельсина-приемника 10, взаимодействующих между собой через трехфазные электромагнитные обмотки 39, 40 и 41 синхронизации (см. фиг.2), подключенные в одноименных точках А, В и С (см. фиг.2). С рулевым валом 3 совмещен сельсин-датчик 9, являясь одной из двух составных частей датчика крутящего момента, а сельсин-приемник 10 в качестве другой составной части датчика крутящего момента установлен с возможностью взаимодействия его электромагнитной обмотки 14 возбуждения с электромагнитной обмоткой 15 возбуждения исполнительного электродвигателя 4, выходной вал 16 которого кинематически связан с рулевым механизмом 6 посредством второго передаточного звена 8. В системе управления конструктивно именно ротор 17 сельсина-датчика 9 совмещен с рулевым валом 3 за счет того, что напрессован на него. При этом сам ротор 17 выполнен составным со впрессованными в него магнитоэлектрическими вставками 18. На рулевой вал 3 напрессована также втулка 19, являющаяся продолжением ротора 17. У сельсина-датчика 9 имеется обмотка 20 возбуждения, которая является частью его статора (не обозначен). Кинематическая связь рулевого вала 3 с рулевым механизмом 6 осуществляется с помощью профильной муфты 21 и первого передаточного звена 7, в состав которого входит передаточная шестерня 22, устанавливаемая в подшипниковых опорах 23 и 24 и входящая в зацепление с рейкой 25. Подшипниковые опоры 23 и 24 расположены в пазах картера (не обозначены) рулевого редуктора 26. При этом сельсин-приемник 10 конструктивно выполнен аналогично сельсину-датчику 9.
Исполнительный электродвигатель 4 имеет обмотку 15 возбуждения, ротор 27 с выходным валом 16. Второе передаточное звено 8, с помощью которого исполнительный электродвигатель 4 связан с рейкой 25 рулевого механизма 6, выполнено аналогично описанному выше первому передаточному звену 7.
Таким образом, ведомая рейка 25 имеет зацепление с двумя ведущими шестернями 22 и размещена в картере рулевого редуктора 26 с опорой на две симметричные втулки 28. К рейке 25 с помощью симметрично расположенных болтов 29 крепятся сошки 30 по левому и правому бортам автомобиля. Каждая из сошек 30 имеет некоторое осевое вращение вокруг соответствующего болта 29 и поэтому имеет возможность передавать усилие от рейки 25 на соответствующую тягу 31, будучи связанной с последней шарнирно. Тяги 31, в свою очередь, посредством резьбовых втулок 32 соединены с тягами 33, а те шарнирно соединены с поворотными кулаками 34 и амортизационными стойками 35 по левому и правому бортам. Детали 29, 30, 31, 32, 33 и 34 представляют собой элементы механического привода поворота колес 37 автомобиля. Поворотные цапфы 36, на которые установлены колеса 37 с помощью подшипниковых опор (не показаны), соединены с амортизационными стойками 35.
Блок 5 управления может содержать элементы, аналогичные известному блоку управления по прототипу и с аналогичными функциями.
В целом блок 5 управления контролирует процесс подачи или отключения напряжения Uвых, необходимого для работы исполнительного электродвигателя 4, в зависимости от сигналов датчиков скорости движения автомобиля, устанавливаемых на колесах 37, тем самым включая или выключая электрический усилитель крутящего момента. Важным элементом управления работой исполнительного электродвигателя 4 является электронный усилитель 38 напряжения У (см. фиг.2). При этом обмотка 20 возбуждения ОВ сельсина-датчика 9 обеспечена питанием от источника переменного напряжения бортовой сети, подключение которой осуществляется к генератору автомобиля.
Что касается исполнительного электродвигателя 4, то в наиболее оптимальном варианте он может быть выполнен асинхронным двухфазным переменного тока.
Адаптивная система рулевого управления транспортного средства работает следующим образом.
При повороте водителем рулевого колеса 1 (см. фиг.1) крутящий момент, создаваемый мускульной силой водителя, передается через рулевой вал 3 и муфту 21 шестерне 22, которая, зацепляясь с рейкой 25, вызывает ее перемещение и передает через нее крутящий момент последовательно элементам механического привода 30, 31, 32, 33 и 34, вызывая, в конечном итоге, поворот амортизационных стоек 35, цапф 36 и колес 37 по левому и правому бортам автомобиля.
Одновременно с поворотом рулевого вала 3 происходит вращение составных частей ротора 17, вследствие чего происходит вращение магнитного потока, создаваемого однофазной обмоткой 20 возбуждения при подключении ее к цепи переменного тока, питаемого от генератора автомобиля. Магнитный поток обмотки 20 возбуждения сельсина-датчика 9 индуцирует в фазах А, В и С обмотки синхронизации электродвижущую силу ЭДС. Значения этих ЭДС зависят, главным образом, от углового положения ротора 17, то есть от положения рулевого вала 3.
Электрические линии связи 39, 40 и 41 выполняются такого диаметра и из материала такого электрического сопротивления, чтобы последнее было пренебрежимо малым. Под действием ЭДС в фазах А, В и С трехфазной обмотки синхронизации возникают токи, которые, проходя по фазам вторичной обмотки синхронизации сельсина-приемника 10, создадут в этих фазах магнитодвижущую силу МДС. Результирующая МДС трех фаз создаст магнитный поток сельсина-приемника 10, который, взаимодействуя с его обмоткой 14 возбуждения (см. фиг.2), наведет в ней выходную ЭДС также, как и магнитный поток, зависящую от углового положения ротора 27 (см. фиг.1) сельсина-приемника 10. Значение выходного напряжения Uвых обмотки возбуждения сельсина-приемника 10 зависит от угла рассогласования ϕ между роторами 17 и 27, то есть
Uвых=f(ϕ),
где ϕ=α-β.
Выходное напряжение обмотки возбуждения Uвых через усилитель 38 (см. фиг.2) блока управления 5 (см. фиг.1) подается на обмотку 15 возбуждения, которая является двухфазной (основная фаза и дополнительная), исполнительного электродвигателя 4.
Блок управления 5, таким образом, содержит помимо других элементов два функциональных элемента: это усилитель электрического напряжения 38 (см. фиг.2) и реле прерывания подачи напряжения (на чертежах не показано), которое при поступлении соответствующего сигнала от датчиков скорости транспортного средства (на чертежах не показаны) срабатывает и отключает усилитель рулевого управления.
Шестерни 22 расположены симметрично по левому и правому бортам, причем шестерня 22 правого борта через муфту 21 соединяется с валом 16 исполнительного электродвигателя 4, которому приходится преодолевать момент сопротивления со стороны колес 37, передаваемый ими элементам механического привода 29, 30, 31, 32, 33, 34 и 35, рейке 25, а затем и шестерне 22 электродвигателя 4.
Электрический сигнал, проходя через усилитель 38 (см. фиг.2), подается на обмотку 15 возбуждения исполнительного двигателя 4, который отрабатывает заданный сельсином-датчиком 9 угол α и возвращает выходной вал 16 (см. фиг.1) сельсина-приемника 10 в положение, при котором выходное напряжение Uвых обмотки 14 (см. фиг.2) возбуждения сельсина-приемника 10 становится равным нулю, при этом положение роторов 17 и 27 сельсинов 9 и 10 соответственно становится согласованным.
В процессе отработки угла β исполнительным электродвигателем 4 (см. фиг.1) крутящий момент, создаваемый электродвигателем 4, передается через муфту 21 приводной шестерне 22, а затем и рейке 25, которая, в свою очередь, передает момент на элементы механического привода 29, 30, 31, 32, 33, 34 и 35, цапфам 36 и управляемым колесам 37.
Выбор исполнительного электродвигателя 4, выполненного в виде асинхронного двухфазного переменного тока, объясняется тем, что электродвигатель данного типа обеспечивает высокую чувствительность, так как момент МВР на выходном валу 16 пропорционален квадрату подаваемого напряжения. Помимо этого электродвигатели такого типа отличаются малым временем срабатывания, кроме того, возрастание момента сопротивления (момента нагрузки) практически не оказывает влияния на частоту вращения ротора, а значит не десинхронизирует вращение рулевого вала 3 и вала 16 ротора 27 электродвигателя 4. При использовании в качестве электродвигателя 4 электродвигатель постоянного тока с возрастанием момента нагрузки увеличивался бы и электромагнитный момент электродвигателя, что вроде бы является положительным качеством, однако при этом ослаблялось бы силовое слежение рулевого управления, то есть водитель почти не ощущал бы или слабо ощущал возрастание момента сопротивления на рулевом колесе 1. Кроме этого при возрастании электромагнитного момента снижалась бы угловая скорость вращения ротора 27, что десинхронизировало бы вращение рулевого вала 3 и электродвигателя 4.
Таким образом, помимо момента, передаваемого левой приводной шестерней 22, создаваемого мускульной силой водителя, создается дополнительный момент от исполнительного электродвигателя 4, что и является эффектом усиления крутящего момента в предлагаемом рулевом управлении. Результатом усиливающего эффекта является возможность снижения усилий на рулевом колесе 3.
Важно отметить, что чем больше угол рассогласования ϕ (см. выше), тем выше выходное напряжение Uвых и тем больший момент создается исполнительным электродвигателем 4. В этом и заключается адаптивность рулевого управления, оснащенного электрическим усилителем. То есть чем больше момент, прикладываемый к рулевому колесу 1, тем больше угол закрутки (поворота) вала 3 рулевого колеса 1 и тем, как следствие, больше угол рассогласования ϕ, что ведет к возрастанию момента, создаваемого исполнительным электродвигателем 4.
Помимо этого, адаптивность выражается в том, что при достижении определенной скорости движения автомобиля датчики скорости подают сигнал на блок БУ управления электродвигателем 4, после чего напряжение на электродвигатель 4 не подается и электроусилитель, таким образом, отключается.
Важным преимуществом данной системы по сравнению с другими электроусилителями является то, что имеются два передаточных звена 7 и 8, которые обеспечивают возможность передачи усилия на рулевой механизм по двум каналам, что способствует более благоприятному распределению усилий на рейке 25. При этом предложенное конструктивное выполнение обеспечивает легкую доступность при техническом обслуживании системы.
Данная система обеспечивает синхронизацию вращения рулевого вала 3 и вала электродвигателя 16 посредством сельсинной связи, что позволяет избежать применения дополнительных датчиков положения и (или) вращения ротора 16 электродвигателя 4.
Таким образом, адаптивная система рулевого управления транспортного средства, выполненная в соответствии с изобретением, позволяет снизить усилия водителя на рулевое колесо при повороте за счет дополнительного момента от исполнительного двигателя и позволяет обеспечить высокую степень синхронизации их работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 2008 |
|
RU2483959C2 |
| РУЛЕВАЯ КОЛОНКА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И БЛОК УПРАВЛЕНИЯ РУЛЕВОЙ КОЛОНКОЙ | 2003 |
|
RU2254257C2 |
| Рулевое управление колесного транспортного средства | 1990 |
|
SU1736802A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |
| УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2380265C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМОМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2092359C1 |
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1539115A1 |
Изобретение относится к транспортному машиностроению и может быть использовано для эффективного управления автомобилем с помощью средств усиления в дополнение к механическому рулевому управлению. Система содержит рулевое колесо 1, соединенное с рулевым валом 3, электрический усилитель крутящего момента, в составе которого имеется датчик крутящего момента, исполнительный электродвигатель 4, и блок 5 управления с подключенными к нему датчиками скорости и крутящего момента, при этом рулевой вал 3 кинематически связан с рулевым механизмом 6 посредством одного передаточного звена 7, а датчик крутящего момента совмещен с рулевым валом 3. В системе управления рулевой механизм 6 снабжен вторым передаточным звеном 8, а датчик крутящего момента выполнен в виде взаимодействующих между собой через электромагнитные обмотки синхронизации сельсина-датчика 9 и сельсина-приемника 10. С рулевым валом 3 совмещен сельсин-датчик 9, а сельсин-приемник 10 установлен с возможностью взаимодействия его электромагнитной обмотки возбуждения с соответствующей обмоткой исполнительного электродвигателя 4, выходной вал 16 которого кинематически связан посредством второго передаточного звена 8 с рулевым механизмом 3. При работе системы, когда происходит вращение рулевого колеса 1 автомобиля, крутящий момент передается механическим путем от рулевого вала 3 с помощью первого передаточного звена 7 на рейку 25 рулевого механизма 6. Одновременно с сельсина-датчика 9 поступает электрический сигнал на сельсин-приемник 10, с выхода которого сигнал подается на блок управления 5 и затем в виде напряжения - на вход исполнительного электродвигателя 4, который также связан с рулевым механизмом 6 посредством второго передаточного звена 8. При этом помимо момента, создаваемого мускульной силой водителя, создается дополнительный момент от исполнительного электродвигателя 4, что дает возможность снизить усилие на рулевом колесе 3, причем, чем больше угол поворота последнего, тем больше момент, создаваемый исполнительным электродвигателем 4. При этом обеспечивается высокая степень синхронизации работы по двум каналам воздействия на рулевой механизм 6. Блок управления 5 при этом фиксирует скорость движения автомобиля с помощью датчиков скорости и при определенной пороговой скорости размыкает электрическую цепь, выключая, таким образом, исполнительный электродвигатель 4. Технический результат заключается в снижении усилий на рулевом колесе, которые прикладывает водитель при повороте автомобиля, и обеспечении большей степени синхронного вращения рулевого вала и вала исполнительного электродвигателя. 1 з.п. ф-лы, 2 ил.
| US 4660671, 28.04.1987 | |||
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

