Изобретение относится к космической технике, в частности к космическим тросовым системам, взаимодействующим с магнитным полем планеты и околопланетной плазмой при движении по орбите вокруг планеты. Взаимодействие таких систем с ионосферной средой может быть использовано для получения электроэнергии на борту космического объекта /КО/ и для управления орбитальным и относительным движением КО.
Из уровня техники известны способы электродинамического взаимодействия КО с ионосферно/магнитосферной средой и соответствующие средства для этого, в частности электродинамические тросовые системы /ЭДТС/, работающие в режиме "орбитального электрогенератора" или "орбитального электродвигателя" [1] В первом из указанных режимов взаимодействие осуществляется путем развертывания электропроводящего элемента /ЭПЭ/ с борта КО в направлении, соответствующем пересечению ЭПЭ силовых линий магнитного поля планеты при его движении по орбите и наведению вдоль этого ЭПЭ электродвижущей силы /ЭДС/.
где индукция магнитного поля планеты;
индукция магнитного поля планеты; скорость движения КО с ЭПЭ по орбите вокруг планеты;
скорость движения КО с ЭПЭ по орбите вокруг планеты; вектор направления развертывания ЭПЭ с длиной 1.
вектор направления развертывания ЭПЭ с длиной 1.
При этом в районе концов ЭПЭ создаются области пониженного контактного сопротивления, в которых происходит эффективный зарядообмен между ЭПЭ и окружающей плазмой и тем самым формируется замкнутая токовая цепь ЭПЭ. При последовательном включении в эту цепь бортовой нагрузки через нее будет протекать генераторный ток и вырабатываться необходимая электрическая мощность. Энергия /высота/ орбиты КО в данном режиме будет снижаться.
Во втором /"двигательном"/ режиме взаимодействие носит обращенный характер: в тех же условиях развертывания ЭПЭ, в его замкнутую токовую цепь дополнительно включается бортовой источник электроэнергии с напряжением εи действующим против наведенной ЭДС и превышает по величине эту ЭДС:
εи > ε (2)
вследствие чего ток меняет направление, и возникает "ускоряющая" распределенная нагрузка на ЭПЭ.

где ток I вдоль ЭПЭ определяется действующим напряжением εи - ε и полным сопротивлением цепи: собственным сопротивлением ЭПЭ, сопротивлением плазменного участка цепи /суммарным импедансом областей пониженного контактного сопротивления/, внутренним сопротивлением бортового источника и/или нагрузки /если последняя подключена к цепи или "обращена" в источник напряжения/. Энергия /высота/ орбиты КО в данном режиме будет увеличиваться.
В обоих режимах области пониженного контактного сопротивления создаются пассивными или, преимущественно, активными средствами, известными как плазменные, контакторы /ПК/. Пассивный ПК представляет собой коллектор тепловых электронов ионосферной плазмы, который должен иметь достаточно большую внешнюю поверхность /больше 100 м2/, чтобы обеспечить протекание по цепи ЭПЭ токов примерно 1.10 А. Активный ПК генерирует в областях ввода концов ЭПЭ в среду повышенную плазменную концентрацию /типично примерно 1012 см-3 против естественной примерно 106 см-3/, интенсифицирующую зарядообмен и увеличивающую крутизну падения потенциала в указанных областях /так называемом "двойном слое"/, что ведет к снижению контактного сопротивления пропорционально уменьшению толщины "двойного слоя" /типично до примерно 50 Ом и ниже/. В качестве активных ПК исследуется термокатод, электронная пушка и различные модификации "полого катода" последние наиболее эффективны и могут работать как в режиме коллектора /К/, так и эмиттера /Э/.
Известные способы электродинамического взаимодействия с ионосферой планеты и реализующие их ЭДТС, обладают высокими характеристиками процесса преобразования механической энергии орбитального движения КО в электрическую и обратно: КПД преобразования теоретически ожидается на уровне больше 80% Вырабатываемая в генераторном режиме электрическая мощность может достигать примерно 100 кВт /для ЭПЭ длиной 10.20 км, при полете КО по орбите высотой 300.500 км вокруг Земли/. Электродинамическая тяга, при тех же длинах ЭПЭ на указанных орбитах /близких к плоскости геомагнитного экватора/ и токах в них, равных 10.50 А, составляет порядка 3.30 Н /электрическая мощность примерно 20.200 кВт/.
Недостатком известных способов и реализующих их ЭДТС являются трудносовместимые требования устойчивого непрерывного электропитания бортовой нагрузки КО и управления движением /орбитальным и относительным/ КО, поскольку в случае однопроводной токовой линии, образующей единственный замкнутый контур через ЭПЭ и плазму, генераторный и двигательный режимы ЭДТС не могут быть реализованы одновременно и, кроме того, вследствие переменности электронной концентрации плазмы и индукции геомагнитного поля вдоль орбиты КО, необходимо существенное регулирование параметров токовой цепи ЭПЭ, в частности - характеристик работы ПК, с основной токовой частотой, и с более высокими частотами для парирования локальных вариаций.
Ближайшим аналогом является способ электродинамического взаимодействия с магнитоплазменной околопланетной средой, включающий развертывание с борта космического объекта на околопланетной орбите первого электропроводящего элемента в направлении, обеспечивающем наведение вдоль этого элемента ЭДС при пересечении им магнитного поля планеты, формирование замкнутой токовой цепи путем создания в окружающей плазме областей пониженного контактного сопротивления и ввода в эти области концов первого электропроводящего элемента, изменение тока в цепи путем поочередного или одновременного последовательного подключения к первому электропроводящему элементу бортовых источника напряжения и нагрузки [2] Данный способ характеризует функционирование вышеописанной ЭДТС в генераторном и двигательном режимах. Технические достоинства способа соответствуют отмеченным выше.
Недостатками известного способа являются, как также следует из вышесказанного, ограниченные функциональные возможности и повышенная чувствительность к вариациям внешних условий.
Ближайшим аналогом в части устройства является ЭДТС, содержащая центральный космический объект с бортовым потребителем электроэнергии, связанные с центральным космическим объектом посредством гибкой структуры первый и второй периферийные космические объекты, один из которых размещен выше, а другой ниже орбиты космического объекта, электропроводящие элементы гибкой структуры, образующие однопроводную токовую линию между центральным и первым периферийным космическими объектами, источник электроэнергии, плазменные контакторы, систему управления плазменными контакторами, включающую в себя средства перевода контакторов в эмиттерный и коллекторный режимы, средства коммутации источника электроэнергии, бортового потребителя электроэнергии, плазменных контакторов и электропроводящих элементов - взаимодействующие с системой управления плазменными контакторами [3]
В известном устройстве центральным КО является орбитальная станция типа Freedom, имеющая в своем составе потребителя /потребителей/ электроэнергии в виде различных целевых и вспомогательных систем. Гибкая структура содержит верхний и нижний тросы, а стыкуемые с ними периферийные КО представляют собой, например, межорбитальный буксир /OTV/ и транспортный КА /ВКС класса Space Shuttle/ соответственно размещенные выше и ниже орбиты станции. ЭПЭ выполнены в виде электрокабельных элементов, интегрированных в гибкую структуру КО и снабженных ПК для образования однопроводной токовой линии, замыкаемой через плазму. Средства перевода ПК из режима Э в режим К /и наоборот/ представляют собой регуляторы потенциала полого катода относительно невозмущенной плазмы: положительный потенциал соответствует режиму К, а отрицательный режиму Э; при этом системой управления может регулироваться также расход ионизируемой среды /ксенона/ через полый катод.
На борту орбитальной станции имеется источник электроэнергии /аккумуляторные батареи, топливные элементы, сверхпроводящие накопители и т. п. /, подключаемый к токовой цепи в двигательном режиме ЭДТС встречно наводимой в ЭПЭ ЭДС (1).
Для подзарядки данный источник может быть включен в токовую цепь в качестве нагрузки: в этом случае его напряжение должно быть ниже наводимого в ЭПЭ εи < ε, а ПК должны быть переведены в состояния, отвечающие генераторному режиму ЭДТС. Необходимые электротехнические функции /регулирования знаков и величин токов и напряжений в различных цепях на борту КО/ выполняются соответствующей коммутационной системой, работающей совместно с системой управления ПК.
Известная ЭДТС, регулирующая способ электродинамического взаимодействия, имеет, кроме уже отмеченных выше, то преимущество,что ее функции /в основном, генераторные/ эффективно вписаны в циклограмму обслуживания центрального КО с помощью ВКС так, что сообщаемая станции при ее обслуживании механическая энергия преобразуется в электричество посредством ЭДТС, позволяя поддерживать орбиту станции в заданных пределах. При обслуживании /с отбором у станции механической энергии/ может применяться, по крайней мере эпизодически, двигательный режим ЭДТС.
Недостатки известной ЭДТС обусловленные, в общем аспекте, единственным замкнутым токовым контуром, образуемым ЭПЭ и плазмой, дополнительно проявляются здесь в невозможности эффективного управления движением /колебаниями/ одновременно двух гибких ветвей: верхней и нижней, что может привести к большим возмущениям движения центрального /и периферийных/ КО. Электродинамическая тяга, создаваемая ЭДТС в двигательном режиме, ограничена мощностью бортового источника /накопителя/ поскольку на самом центральном КО невозможно или нежелательно размещать слишком мощную /например, ядерную/энергоустановку; кроме того, в данной системе электрически задействуется лишь одна из ветвей, при этом надежность ЭДТС невысока, т.к. не предусмотрено дублирование /резервирование/ средств образования замкнутой токовой цепи /цепей/, включающей ЭПЭ и плазму.
Технической задачей является расширение функциональных возможностей средств взаимодействия с ионосферой, в частности обеспечении гибкости и многовариантности выбора различных режимов работы ЭДТС при условии полного активного контроля колебаний ветвей ЭПЭ; обеспечение надежного и /при необходимости/ непрерывного питания бортовой нагрузки независимо от режима работы ЭДТС /генераторного, двигательного или их комбинации/, повышение мощности бортового источника электроэнергии путем снятия ограничений на месте его размещения в системе и гарантии безопасного функционирования /в т.ч. при аварийной ситуации/; увеличение эффективности генераторного и двигательного режимов взаимодействия ЭДТС с ионосферой; уменьшение возмущающего /вредного/ влияния элементов ЭДТС на центральный КО в механическом и физико-химическом отношениях, повышение надежности системы за счет введения в нее факторов дублирования и/или резервирования, создание средств взаимодействия с ионосферой повышенной синергетичности, т.е. позволяющих решить вышеперечисленные задачи с минимальным числом вновь вводимых элементов системы.
Задача решается тем, что в способе формируют первую дополнительную токовую цепь путем развертывания, аналогично первому, второго электропроводящего элемента и замыкания этим вторым элементом концов первого электропроводящего элемента, формируют вторую дополнительную токовую цепь путем развертывания 3-его электропроводящего элемента в направлении, обеспечивающем наведение вдоль этого элемента ЭДС при пересечении им магнитного поля планеты и ввода одного конца 3-го электропроводящего элемента к одной из областей пониженного контактного сопротивления 1-го электропроводящего элемента, создания в окружающей плазме дополнительной области пониженного контактного сопротивления и ввода в эту область другого конца 3-его электропроводящего элемента.
При этом, в частности, электропроводящие элементы развертывают: первый и второй в верхней ориентации, а третий в нижней ориентации относительно космического объекта.
Кроме того, в частности, третий электропроводящий элемент взаимодействует с одной из областей пониженного контактного сопротивления первого электропроводящего элемента через поочередно или одновременно бортовые источник напряжения и нагрузку.
Кроме того, в частности, изменяют (с эмиттерного на коллекторный и обратно) тип зарядообмена в областях пониженного контактного сопротивления, поддерживая один и тот же тип зарядообмена не более, чем в двух областях одновременно.
При этом, в частности, изменение тока в токовых цепях дополнительно осуществляют путем регулирования сопротивления бортовой нагрузки и/или напряжения бортового источника.
Задача решается также тем, что в ЭДТС на центральном и каждом из периферийных космических объектов установлено по меньшей мере по одному плазменному контактору, электропроводящие элементы гибкой структуры дополнительно образуют между центральным и вторым периферийным космическими объектами двухпроводную токовую линию, коммутируемую с источником электроэнергии, бортовым потребителем электроэнергии, плазменными контакторами и однопроводной токовой линией между центральным и первым периферийным космическими объектами.
Источник электроэнергии установлен на втором периферийном космическом объекте. Кроме того, источник энергии может быть выполнен в виде солнечной газотурбинной установки /СГТУ/ и размещен выше орбиты центрального космического объекта.
Энергоустановка содержит высокотемпературную и низкотемпературную радиаторные поверхности, используемые, соответственно, в качестве эмиттера и коллектора электронов плазменного контактора, установленного на 2-ом периферийном космическом объекте, а средства перевода этого контактора в эмиттерный и коллекторный режимы выполнены в виде устройства избирательного подключения электропроводящих элементов двухпроводной токовой линии к радиаторным поверхностям энергоустановки.
Гибкая структура соединена с центральным космическим объектом через выносной элемент, шарнирно связанный с этим космическим объектом, причем, соответствующий плазменный контактор установлен на конце выносного элемента, удаленном от центрального космического объекта.
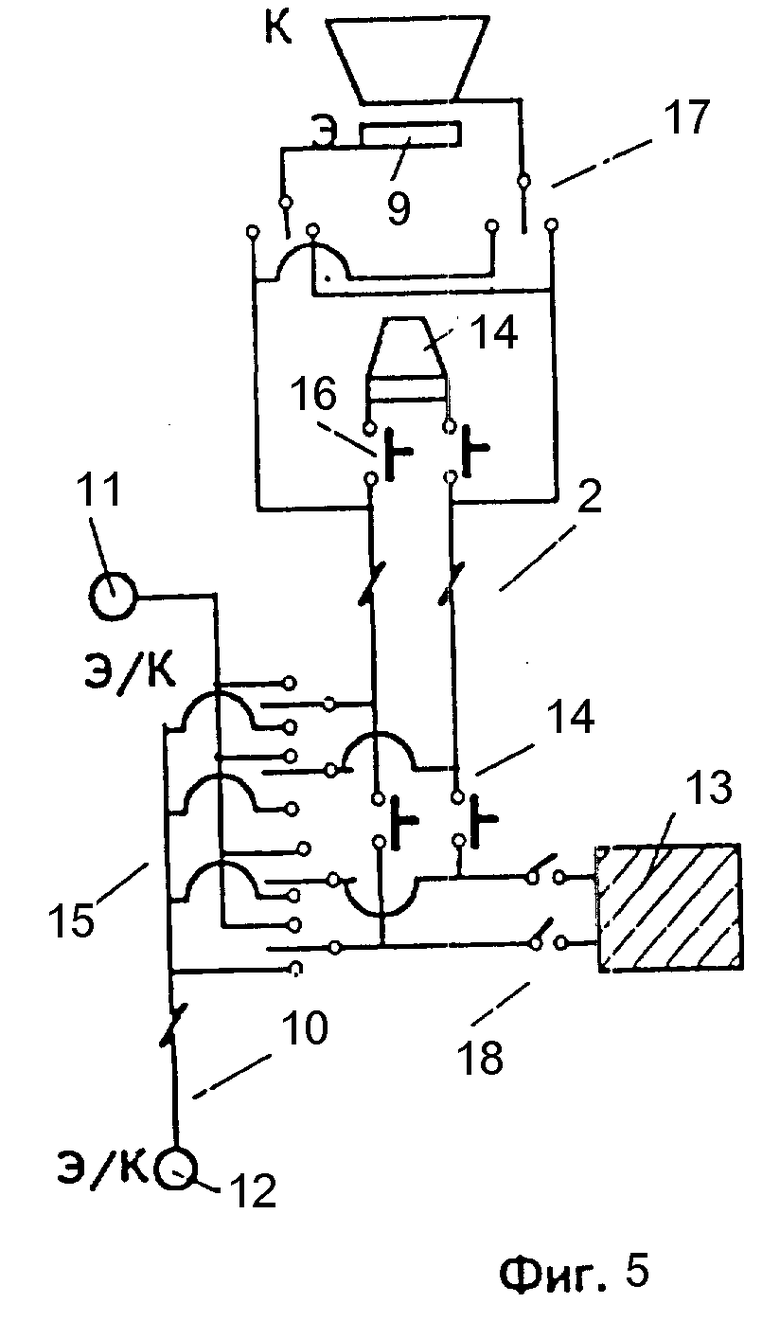
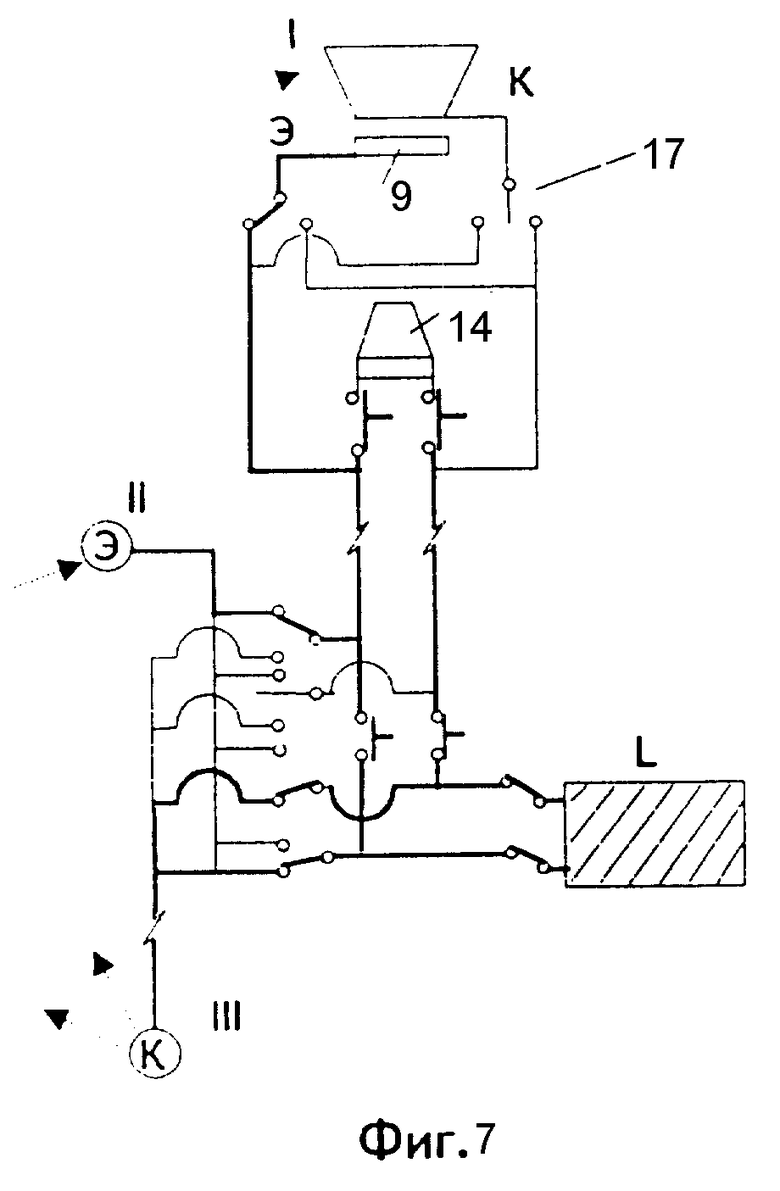
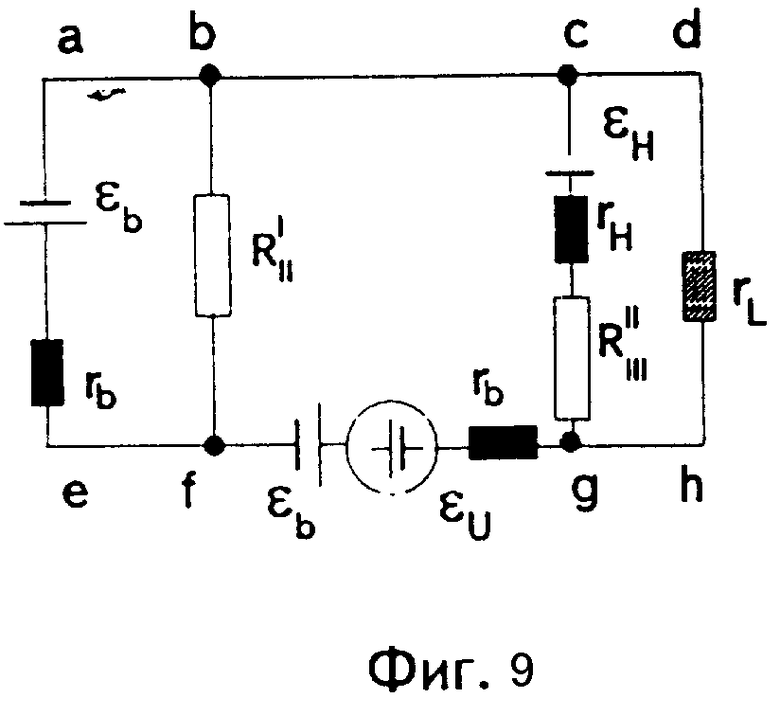
На фиг. 1 представлена схема электродинамической тросовой системы; на фиг. 2 схематично состояние ЭДТС в основном генераторном режиме; на фиг. 3 - схематично состояние ЭДТС в основном двигательном режиме; на фиг. 4 - схематично одно из возможных состояний ЭДТС в комбинированном /генераторно/двигательном/ режиме; на фиг. 5 одна из возможных схем электрокоммутации основных элементов ЭДТС, выполненной в варианте, показанном на фиг. 1; на фиг. 6-8 варианты коммутации бортовых цепей, согласно фиг. 5, для трех основных типов активного подключения ПК предлагаемой ЭДТС: одного симметричного /фиг. 6/ и двух асимметричных /фиг. 7, 8/; на фиг. 9-11 ЭС для соответствующих типов активного подключения ПК по фиг. 6-8; на фиг. 12-14 - общие диаграммы замкнутых токовых цепей, формирующихся в ЭПЭ и плазме, соответственно для каждого из трех типов активного подключения ПК на фиг. 6-8; на фиг. 15 основные электротехнические характеристики комбинированного /фиг. 4, 12/ режима ЭДТС для некоторого частного варианта реализации системы, при r1 равном 50 Ом; на фиг. 16 представлены характеристики основного двигательного /фиг. 3/ режима ЭДТС в некотором частном варианте, в соответствии с фиг. 14 /Iэ IIк IIIк/; на фиг. 17 - характеристики основного генераторного /фиг. 2/ режима ЭДТС в некотором частном варианте, в соответствии с фиг. 14 /Iк IIэ IIIэ/.
Электродинамическая тросовая система состоит из токопроводящих тросов 1 и 2, на концах которых укреплены верхний 3 и нижний 4 периферийные космические объекты /КО/.
Центральный КО 5 связан с периферийным КО 3 /верхним/ и 4 /нижним/ гибкой структурой, обеспечивающей механическое взаимодействие основной части КО 5 с верхним 2 и нижним 1 гибкими токопроводящими тросами, например, через выносной элемент 6 /ферменную балку/ со служебным модулем 7 на одном конце и шарнирной опорой 8 на другом конце. Служебный модуль 7 содержит узел подвеса гибкой структуры с соответствующими направляющими и демпфирующими устройствами, а также средствами развертывания/свертывания гибкой структуры, на этом модуле также установлены элементы коммутационной системы управления плазменного контактора /ПК/. Опора 8 содержит, например, шарнирный трехстепенный подвес с приводом ориентации выносного элемента 6 относительно основной части КО 5.
На внешнем /верхнем/ конце гибкой ветви 2 закреплен модуль солнечной газотурбинной установки /СГТУ/, либо другой источник энергии с высокотемпературной 9 и низкотемпературной 10 радиаторными поверхностями. Здесь же размещены элементы системы управления ПК и коммутационной системы. Высокотемпературная поверхность 9 выполнена из жаростойкого материала с покрытием, обеспечивающим достаточно низкую работу выхода электронов /порядка 1,5.2 эВ/ для того, чтобы высокие эмиссионные токи /порядка 10.100 А/ при характерных температурах порядка 1000 К. Низкотемпературная поверхность выполнена достаточно большой площади /гораздо больше 100 м2/ в виде плоской, овально-цилиндрической /конической/ или иной уплощенной оболочки, вытянутой своим максимальным диаметром вдоль направления полета для уменьшения аэродинамического сопротивления.
Верхняя гибкая ветвь 2 выполнена в виде кабель-троса, имеющего двухпроводную линию, например, из N изолированных ЭПЭ, из которых m используются для электрического тока одного направления /I1/, а k для тока противоположного направления /I2/, причем m + k Nи, вообще говоря, I1≠I2, так что суммарный ток в ветви 12: I12 I1 I2≠0.
Ветвь 1 выполнена в виде кабель-троса с однопроводной линией из одного или нескольких изолированных ЭПЭ. В этой ветви протекает ток Iн какого-либо одного направления.
На служебном модуле 7 установлен ПК 11, например, в виде двухрежимного Э/К/ полого катода или одной из его модификаций. На нижнем периферийном КО 4 установлен аналогичный ПК 12, а также элементы системы коммутации и управления ПК. В местах установки ПК 11 и 12 предусмотрены емкости с запасом рабочего тела /например, ксенона/ для работы ПК, а также необходимые средства регулирования расхода рабочего тела через ПК для изменения параметров ОПКС II и III.
Бортовые потребители /"нагрузка" 13 на центральном КО 5 могут подключаться к энергоустановке 14 посредством контактов 15. Контактная группа 16 служит для коммутации ПК 11, 12 нагрузки 13 и двупроводной линии /ветви/ 2. СГТУ 14 подключается к линии 2 эмиттера 9 или коллекторного 10 верхних ПК. Контакты 19 служат для подключения к системе нагрузки 13. При необходимости, могут быть предусмотрены средства изменения полярности /не показаны/ при подключении нагрузки 13 и СГТУ 14 к системе через контакты 17 и 19.
СГТУ 14 выполнена с обеспечением на ее выходе постоянного напряжения εи величина /и полярность/ которого могут регулироваться известными средствами, которые считаются включенными в состав самой энергоустановки.
Работа описанной ЭДТС, при реализации способа согласно изобретению, осуществляется следующим образом.
На околопланетную орбиту выводится центральный КО 5 /например, ОКС "МИР"/. Остальные элементы ЭДТС могут быть выведены вместе с КО 5, либо доставлены впоследствии грузовым КА и пристыкованы к основной части с помощью штатных стыковочных устройств, при этом элементы 2 -12 системы, после стыковки опоры 8 с основной частью КО 5, развертываются из транспортного положения в рабочее: периферийные КО 3 и 4 разводятся вдоль местной вертикали при постепенном выпуске, с помощью лебедок, кабель-тросов 2, 1, источник энергии приводится в рабочее состояние. После развертывания ЭДТС гасятся остальные динамические возмущения и активизируются соответствующие подсистемы /подсистемы управления, коммутации, энергопитания и т.д. размещенные на основной части и служебном модуле 7, сопрягаются через стыковочные электроразъемные опоры 8 станции; сопряжение с модулем 7 осуществляется по кабелю, проложенному в выносном элементе 6/.
В зависимости от конкретных условий полета и задач, решаемых КО 5, основная часть может быть ориентирована относительно гибкой структуры /2-1/ различным образом, в частности "поперечно" или "вдоль" /пунктирное изображение на фиг. 1/. Нежелательные динамические воздействия со стороны гибкой структуры на основную часть сводятся к минимуму за счет демпфирующих средств на модуле 7, диссипативных свойств конструкции 6 и соответствующего управления приводом подвеса опоры 8.
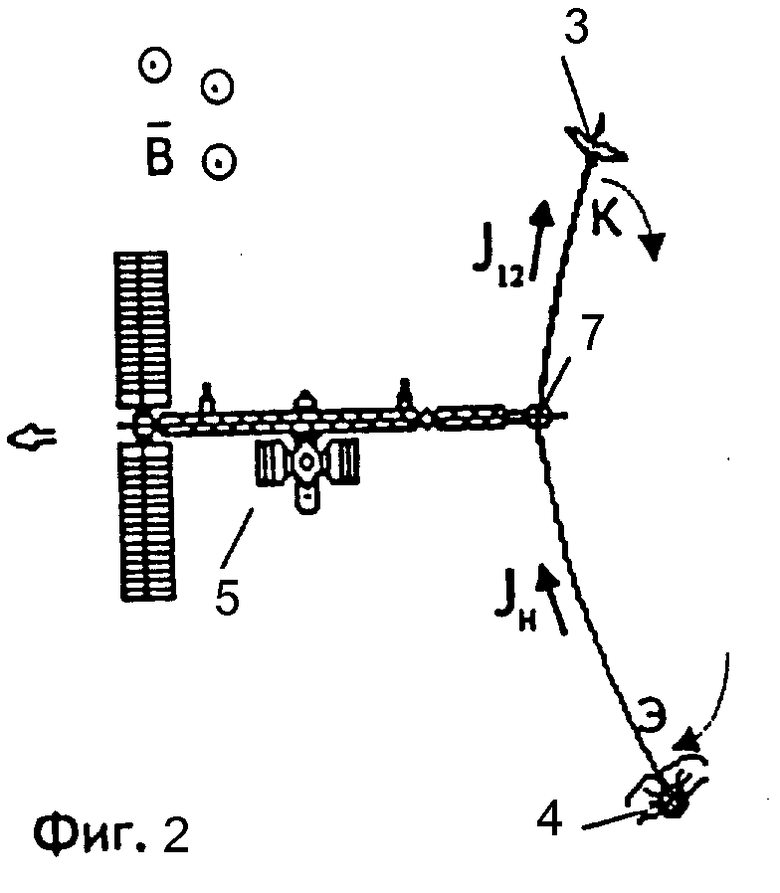
Типичные случаи взаимодействия ЭДТС с внешним магнитным полем В наглядно показаны на фиг. 2-4 /силовые линии этого поля, условно, выходят из плоскости чертежа/.
В основном генераторном режиме /Iк IIк IIIэ или Iк IIэ IIIэ/ токи I12 и Iн в верхней и нижней ветвях продолжаются наведенной ЭДС (1) и, возможно, дополнительным подключением к цепи источника энергии, например, по схеме фиг. 8. Лоренцевы распределенные нагрузки (3) в данном случае являются тормозящими /фиг. 2/, и при ощутимой их величине гибкая структура может выполнять функции стабилизатора КО 5 /ориентированного "поперечно"/. ПК 11 на модуле 7 расположены позади КО 5 так, что основные системы КО 5 не подвержены возмущениям со стороны ОПКС этого ПК, что может иметь важное значение при проведении некоторых тонких экспериментов на борту.
В основном двигательном режиме /фиг. 3/, который соответствует типам коммутации ПК: Iэ IIк IIIк или Iэ IIэ IIIк I12 и Iн имеют направление, противоположное предыдущему. Двигательный режим реализуется при включении в цепь источника напряжения 9, например по схеме фиг. 7. Лоренцевы распределительные нагрузки (3) в данном случае являются ускоряющими, и вновь гибкая структура может, дополнительно, выполнять функции стабилизатора КО 5; впрочем, если воздействие ОПКС ПК 11 /на модуле 7/ на КО 5 нежелательно, то "задняя поперечная" ориентация КО 5 /фиг. 3/ может быть заменена на какую-либо другую, что не вызовет принципиальных трудностей, т.к. действующий со стороны гибкой структуры электродинамические силы относительно невелики.
Комбинированный /"симметричный"/ режим работы ЭДТС /фиг. 4/ является одной из отличительных особенностей предлагаемого изобретения. В этом режиме /Iэ IIк IIIэ или Iк IIэ IIIк/ токи I12 и Iн текут во взаимнопротивоположных направлениях и создают распределенные нагрузки /3/ различного типа/. Данный режим может использоваться, наряду и попеременно, с остальными режимами, в частности для стабилизации /демпфирования "раскачки"/ ветвей гибкой структуры, причем стабилизация каждой из ветвей может производиться независимо от другой. Одна из возможных схем коммутации для этого режима показана на фиг. 6. На ориентацию КО 5 не накладывается каких-либо специальных ограничений.
При работе ЭДТС может быть реализован весьма широкий спектр режимов.
Для того, чтобы убедиться в этом, предварительно введем следующие обозначения: состояние верхней /В/ и нижней /Н/ ветвей будем обозначать как "Г" /генераторный режим, "Д" /двигательный режим/ и "О" /отсутствие тока в ветви/.
Таким образом, например, для состояний ЭДТС на фиг. 2, 4, 3 будет иметь соответственно:
Каждое состояние соответствует определенной коммутации /режима/ ПК и направлению токов I12 и Iм в ветвях.
Согласно принятым обозначениям, все активные режимы работы ЭДТС следующие:
При этом в любом генераторном режиме источник энергии 14 может быть либо подключен к нагрузке 13 /фиг. 5/, либо отключен от нее. В любом двигательном режиме нагрузка 13 либо подключена к цепи, либо отключена. Крое того, в двигательном режиме СГТУ 14 может быть включена либо только в "двигательную" цепь, либо также и в нагрузку 13. В генераторном режиме нагрузка 13 подключена либо только к "генераторной" цепи, либо также и к СГТУ 14. Имеется еще и пассивный режим: I0 II0 III0 /B+H/O/, в котором источник энергии 14 либо питает нагрузку 13, либо нет.
Исходя из этого, можно подсчитать, что в ЭДТС реализуется более 30 рабочих режимов, которые могут выбираться и комбинироваться практически в любой временной последовательности /учитывая медленный с периодом порядка 500 с характер либрационных колебаний ветвей ЭДТС/. Очевидно также обеспечение много кратного дублирования /резервирования/ системы в отношении каждого из основных режимов ("Д" и "Г").
Таким образом, введение одного дополнительного /третьего/ ПК позволила, тем не менее, качественно повысить гибкость, надежность и синергичность функционирования системы. Этому также значительно содействует наличие двухпроводной, токовой линии в ветви 2 /фиг. 1, 5/ и удельной мощной энергоустановки 14, подключаемой к данной линии.
Для более наглядной иллюстрации достигаемого технического результата ниже рассматриваются, на типичном примере, некоторые частотные случаи реализации предлагаемого изобретения.
Симметричные режимы образования замкнутых токовых цепей в плазме /Iэ IIк IIIэ и Iк IIэ IIIк/, схематично показанные на фиг. 12, обеспечиваются коммутацией бортовых элементов ЭДТС согласно фиг. 6. Соответствующая эквивалентная электросхема представлена на фиг. 9, где приняты во внимание сопротивления верхней двухпроводной линии 2 (2•rв), нижней однопроводной линии 1 /rн/, нагрузки 13 /rн/, плазменного участка между ОПСК 1 и II /  / и плазменного участка между ОПСК II и III /
/ и плазменного участка между ОПСК II и III /  /. Наводимые ЭДС (1) для верхней линии 2 суть εв а для нижней линии 1 - εн напряжение источника суть εи Вдоль участка "ае" течет ток I1; вдоль "fg" ток I2; вдоль "fb" /через плазму/ течет суммарный ток I12=I1 - I2; вдоль участка "cd" /через плазму и нижнюю ветвь 1/ ток Iн; через нагрузку /r4/ течет ток нагрузки I4.
/. Наводимые ЭДС (1) для верхней линии 2 суть εв а для нижней линии 1 - εн напряжение источника суть εи Вдоль участка "ае" течет ток I1; вдоль "fg" ток I2; вдоль "fb" /через плазму/ течет суммарный ток I12=I1 - I2; вдоль участка "cd" /через плазму и нижнюю ветвь 1/ ток Iн; через нагрузку /r4/ течет ток нагрузки I4.
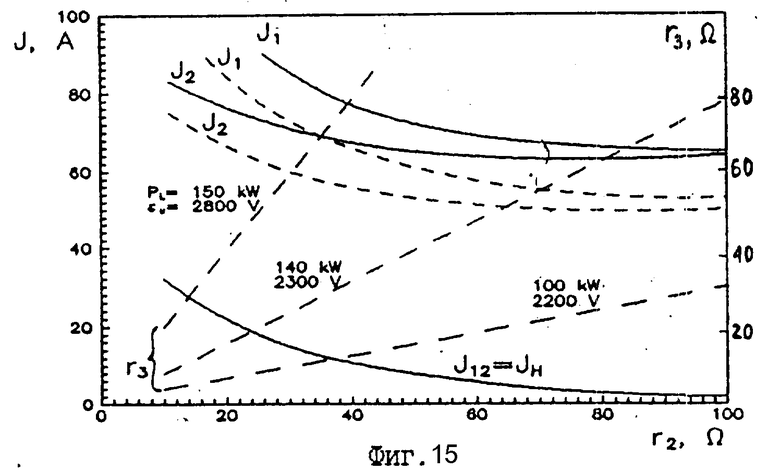
Из условий баланса токов и потенциалов в узлах ЭС на фиг. 9 могут быть найдены интересующие электротехнические характеристики ЭДТС в рассматриваемом режиме. Характерный пример представлен графиками на фиг.15, где по левой ординате отложены величины токов в ЭПЭ, а по правой ординате полное сопротивление  /фиг. 12/ замкнутой токовой цепи нижнего ЭПЭ /13/. Зависимости токов I1, I2, I12, Iн и сопротивления даны по отношению к величине сопротивления
/фиг. 12/ замкнутой токовой цепи нижнего ЭПЭ /13/. Зависимости токов I1, I2, I12, Iн и сопротивления даны по отношению к величине сопротивления  плазменного участка верхней ветви 2 ЭДТС /ось абсцис/.
плазменного участка верхней ветви 2 ЭДТС /ось абсцис/.
Здесь и далее, для определенности, рассматривается ЭДТС со следующими параметрами:
Длина верхней ветви (2) 2 км
Длина нижней ветви (1) 10 км
Погонное электросопротивление ЭПЭ /любой однопроводной линии/ 2,5 Ом/км
Наводимые удельные ЭДС 200 В/км
В соответствии с этим имеем:
rв 5 Ом, rн 25 Ом, εв = 400 B, εн = 2000 B.
Параметры  rн и εи переменные и могут рассматриваться как управляющие /в частности, регулируемые импедансы ПК:
rн и εи переменные и могут рассматриваться как управляющие /в частности, регулируемые импедансы ПК:  и т.п. могут быть факторами стабилизации токов и напряжений в цепях/.
и т.п. могут быть факторами стабилизации токов и напряжений в цепях/.
Возвращаясь к комбинированному режиму работы ЭДТС /фиг. 15/, отметим, что в данном конкретном случае принято постоянное значение сопротивления нагрузки /13/ rн равное 50 Ом и ряд фиксированных значений мощности /P4 I
Из фиг. 15 видно, что "управляющие" токи I12, равные Iн, заметно меньше "порождающих" токов I1 и I2 /жирные линии I1 и I2 отвечают случаю: εи равно 2800 В; P4 равно 150 кВт/. Снижение последних /пунктирные линии I1 и I2 при εи равно 2200 В, Р4 равно 100 кВт/ ограничено совершенством ПК. Так, если  порядка 50 Ом, то величина r3 не меньше 75 Ом, и последний случай /2200 В/100 кВт/ практически не проходит как показывает соответствующая характеристика r3 (r2) на фиг. 15. Тем не менее, практически достижимые токи I12 равные Iн порядка 10.15 А вполне достаточны для "деликатного" демпфирования раскачки ветвей при обеспечении постоянного уровня энергоснабжения нагрузки 13 и при постоянном напряжении источника энергии 14. Более мощное демпфирование ветвей можно произвести, например, с использованием "полуактивных" режимов ЭДТС (5).
порядка 50 Ом, то величина r3 не меньше 75 Ом, и последний случай /2200 В/100 кВт/ практически не проходит как показывает соответствующая характеристика r3 (r2) на фиг. 15. Тем не менее, практически достижимые токи I12 равные Iн порядка 10.15 А вполне достаточны для "деликатного" демпфирования раскачки ветвей при обеспечении постоянного уровня энергоснабжения нагрузки 13 и при постоянном напряжении источника энергии 14. Более мощное демпфирование ветвей можно произвести, например, с использованием "полуактивных" режимов ЭДТС (5).
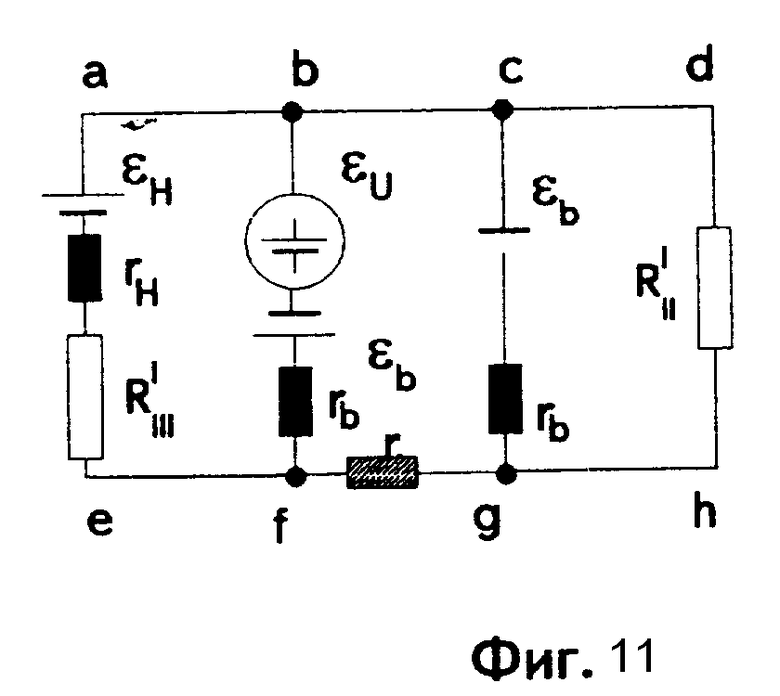
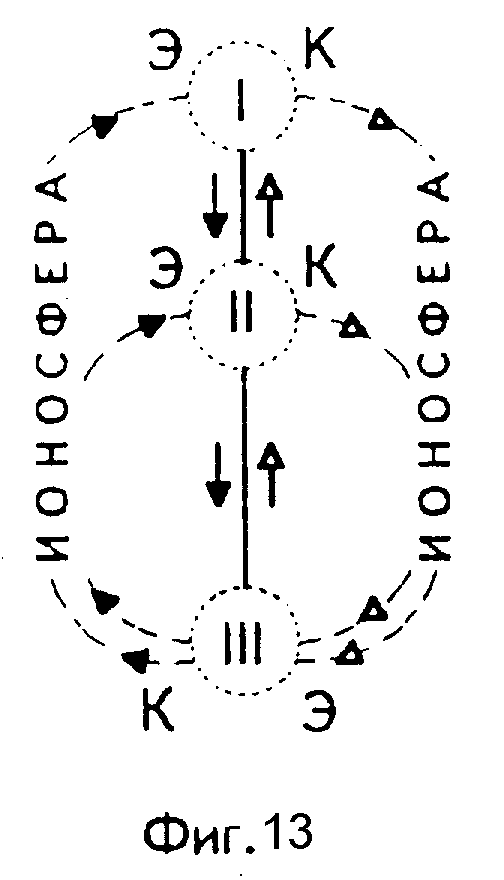
Асимметричные режимы образования замкнутых токовых цепей в плазме /фиг. 13 и 14/ используются, преимущественно в основных состояниях двигателя /В+Н/Д/ и генератора /В+Н/Г/. Соответствующие ЭС для примеров коммутации бортовых цепей /фиг. 7 и 8/ показаны на фиг. 10 и 11. Обозначения всех элементов ЭС и их смысл те же, что и для ЭС на фиг. 9.
При этом, в ЭС на фиг.10 вдоль ее участков текут следующие токи: "ab" - Iн; "cd" I2; "ef" I1; "hg" I2; "be" - I4; "ed" I* I4 I1.
В ЭС на фиг. 11 вдоль ее участков текут токи: "gc" Iн; "bf" - I2; "ae" Iн; "dh" I*; "cd" и "fg" I4.
Для ЭДТС с исходными данными /6/ характеристики основного двигательного режима: Iэ IIе IIIк /В+Н/Д/ показаны на фиг. 16 при следующих фиксированных параметрах:
и для различных значений r4 /ось абсцисс/. Нагрузка 13 подключена к питанию от СГТУ 14, как и во всех остальных рассматриваемых примерах /и как это следует из схем фиг. 8 и 9/. Пунктирная кривая характеризует "традиционный" вариант ЭДТС в данном, двигательном, режиме /с подключенной нагрузкой r4/, где следует положить:  35 Ом, ε = εн + εв 2400 В, rв _→ rв + rн = 30 Ом, εи 4400 В и, наконец, I ≡ Iов.
35 Ом, ε = εн + εв 2400 В, rв _→ rв + rн = 30 Ом, εи 4400 В и, наконец, I ≡ Iов.
Из фиг. 16 видно, что при фиксированном напряжении εн имеет место более мощное ускорение системы, чем в случае обычной ЭДТС, когда сопротивление нагрузки r4 не меньше 30.40 Ом /практически это сопротивление должно быть гораздо больше/.
Кроме того, изменение токов Iн (r4) и I12 (r4) происходит неодинаково, что позволяет дифференциально регулировать силы, действующие на нижнюю и верхнюю ветви, путем соответствующего увеличения или уменьшения нагрузки r4. Этим достигается стабилизация движения ветвей относительно КО 5.
Наконец, качественной особенностью данного режима является рост токов I12 и Iн в обеих ветвях с ростом r4; в обычном случае /ток Iоб/ картина оказывается обратной.
Для той же схемы коммутации цепей ЭДТС /фиг. 8,9/ характеристики основного генераторного режима: Iк IIэ IIIэ /В+Н/Г/ - показаны на фиг. 17.
При этом, соблюдается условие "пассивного включения" источника питания 14:
при котором он не расходует своей мощности, а только создает некоторое "противонапряжения" ε
Из фиг. 17 наглядно видна новая качественная особенность предлагаемой ЭДТС: токи /I12, Iн/ и питающая нагрузку мощность / P
Заметим, что в обоих из рассмотренных выше режимов /фиг. 16 и 17/ имеются примерно одинаковые диапазоны оптимальных значений: r
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДКАЛИБЕРНЫЙ СНАРЯД ДЛЯ ЭЛЕКТРОДИНАМИЧЕСКОЙ ПУШКИ | 1995 |
|
RU2092780C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |
| УСТРОЙСТВО ЭЛЕКТРОДИНАМИЧЕСКОЙ ЗАЩИТЫ | 1994 |
|
RU2072500C1 |
| КОСМИЧЕСКАЯ СИСТЕМА И СПОСОБ ОСУЩЕСТВЛЕНИЯ ИНФОРМАЦИОННОГО ОБМЕНА | 1999 |
|
RU2169990C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2020776C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 1997 |
|
RU2155701C2 |
| УСКОРИТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1995 |
|
RU2084085C1 |
| НАДУВНОЙ АВТОНОМНЫЙ КОСМИЧЕСКИЙ МОДУЛЬ | 2003 |
|
RU2241644C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023203C1 |









Использование: в космической технике, в частности в космических электродинамических тросовых системах (ЭДТС), взаимодействие которых с околопланетными магнитным полем и плазмой может быть использовано для получения электроэнергии на борту космического объекта (КО) и для управления орбитальным и относительным движением КО. ЭДТС содержит центральный КО 5 и периферийные КО 3 (верхний) и 4 (нижний) - связанные с КО 5 ветвями 1 и 2 гибкой структуры, включающей в себя электропроводные элементы (ЭПЭ), которые образуют двухпроводную токовую линию в ветви 2 и однопроводную токовую линию в ветви 1. На верхнем конце ветви 2 размещен источник питания (СГТУ) 14 и первый плазменный контактор (ПК), например - в виде радиаторных поверхностей 9, 10 энергоустановки; второй 11 и третий 12 ПК установлены, соответственно, в районе соединения ветвей 2 и 1 с КО 5 и на нижнем конце ветви 1. Источник питания (14), ПК (9, 10, 11, 12) и бортовые потребители КО 5 снабжены электрокоммутационной системой и системой управления ПК. При переводе части ПК в эмиттерный, а части - в коллекторный режимы и соответствующей коммутации ПК, ЭПЭ, источника питания и бортовых потребителей - образуются различные схемы электрических цепей, замыкаемых через околопланетную плазму посредством ПК. Регулируя параметры данных цепей, обеспечивают протекание в них токов требуемой величины и направления, за счет чего осуществляют энергопитание бортовых потребителей и/или управление относительным и орбитальным движением КО 5 и связанных с ним периферийных КО 3 и 4. В данной ЭДТС может быть реализовано порядка 30 различных режимов электродинамического взаимодействия с магнитно-плазменной околопланетной средой: двигательного, генераторного и комбинированного типов, при этом обеспечивается частичное или полное дублирование (резервирование) работы ЭДТС в режимах основных типов. 2 с. и 8 з.п. ф-лы, 17 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Итоги науки и техники | |||
| Сер | |||
| "Ракетостроение и космическая техника".- М., 1991, т.12, с.60 - 73 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.66 - 70, 128 - 133. | |||
