Изобретение относится к области дистанционного управления машинами и, в частности, летательными аппаратами. В современной технике дистанционного управления широкое применение нашел способ телеориентирования управляемых машин и аппаратов в оптическом луче (Цуккерман С.Т. Гридин А.С. Управление машинами при помощи оптического луча. Л. Машиностроение, 1969), сущность которого заключается в следующем. В пункте управления располагают прожектор, который при помощи закрепленного с ним в общем корпусе оптического визира ориентируют в нужном направлении. Прожектор излучает оптический поток, модулированный таким образом, что каждой координате в пределах его поля зрения соответствует определенное значение информативного параметра, например, частоты модуляции сигнала. Оптический поток излучается одновременно во всю зону управления (круг диаметром 6-8 метров). Таким образом формируется оптическое поле, в котором ориентируется объект управления.
Данный способ формирования оптического поля выбран прототипом заявляемого способа.
Бортовая аппаратура управляемой машины (аппарата), приняв излученный прожектором поток, определяет значения информативного параметра, соответствующие координатам, и по этим значениям вырабатывает команды, приводящие управляемый объект на оптическую ось прожектора.
Устройство, служащее для осуществления известного способа, содержит прожектор, включающий источник непрерывного излучения, механический модулятор (растр) и проекционную оптику, создающую в поле зрения изображение растра. В состав устройства входит также визир.
Данное устройство, описанное в книге С.Т. Цуккермана и А.С. Гридина выбрано в качестве прототипа.
Известные способ и устройство имеют следующие недостатки:
значительные масса, габариты и энергопотребление наземной аппаратуры, ее конструктивная сложность;
невозможность передавать в луче наряду с информацией о координатах дополнительную информацию (например, об угловой скорости линии визирования), необходимую для повышения качества управления;
сложность и даже практическая невозможность изменять в процессе управления крутизну пеленгационной характеристики и положение опорного (соответствующего нулевым значениям координат) направления.
Целью изобретения является создание способа и устройства, характеризующихся:
сниженными по сравнению с прототипами массой, габаритами и энергопотреблением наземной аппаратуры, ее конструктивной простотой;
возможностью передавать в луче наряду с информацией о координатах дополнительную информацию (например, об угловой скорости линии визирования), необходимую для повышения качества управления;
возможностью изменять в процессе управления крутизну пеленгационной характеристики и положение опорного (соответствующего нулевым значениям координат) направления.
Поставленная цель достигается тем, что заполнение оптическим потоком зоны, в которой производится телеориентирование, производят путем сканирования узкими лучами. При этом каждый из сканирующих лучей имеет в сечении картинной (т. е. перпендикулярной оси прожектора) плоскостью вид узкой (отношение длины к ширине 20 и более) полосы. Длина каждой из полос совпадает по размеру с полем зрения. Такие лучи называют плоскими, ножевидными, а также веерообразными. Одна из полос горизонтальна, перемещается по вертикали, и используется для формирования сигналов, служащих для определения координаты вдоль вертикальной оси OY. Другая полоса вертикальна, перемещается по горизонтали, и используется для формирования сигналов, определяющих координату вдоль горизонтальной оси OX. Лучи сканируют зону управления, перемещаясь со взаимным сдвигом по времени вдоль направлений (координатных осей), перпендикулярных плоскостям лучей.
Излучение при этом производят последовательностями посылок, каждая из которых состоит из двух импульсов. Далее по тексту такая посылка из двух импульсов условно названа двойкой. Интервал времени между одиночными импульсами, образующими двойку, постоянен для каждого из лучей, но имеет свое значение для каждого луча. В процессе отклонения каждого сканирующего луча интервалы времени между двойками изменяют пропорционально отклонению луча от оптической оси визира. Знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира.
Снижение затрат энергии для формирования поля при предложенном способе определяется тем, что обеспечивается возможность использования для кодирования информации о положении луча коротких оптических импульсов. Это позволяет, кроме того, передавать на борт управляемого аппарата дополнительную информацию. Сочетание постепенности формирования зоны управления (зона формируется в процессе сканирования) с импульсным характером излучения позволяет изменять вид пеленгационной характеристики (ее крутизну и положение опорного направления) в процессе управления (принципиально это можно делать в каждом кадре). Данное свойство позволяет повысить качество процесса управления и расширить функциональные возможности аппаратуры. Так, обеспечивается возможность смещать положение оси прожектора относительно оси визира за счет модуляции сигнала. Заполнение зоны управления излучением с использованием плоских лучей позволяет использовать для решения поставленной задачи инжекционные полупроводниковые лазеры, обладающие значительными преимуществами перед другими известными источниками оптического излучения: высоким КПД (до 20 процентов), миниатюрностью, удобством в эксплуатации, надежностью и т.д. Это позволяет создать конструктивно простую и компактную наземную аппаратуру.
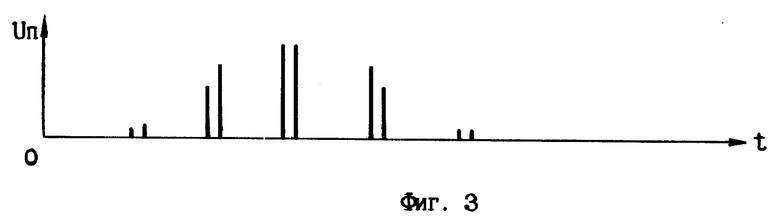
На фиг. 1 показана схема сканирования, на фиг. 2 излучаемые сигналы Uи, характеризующие модуляцию одного из лучей, на фиг. 3 сигнал Uп, принимаемый бортовой аппаратурой.
На фиг. 1 представлены границы зоны управления 1 в картинной (т.е. перпендикулярной оси прожектора) плоскости, горизонтальный луч 2 (перемещается по вертикали, используется для измерения координаты по оси OY), вертикальный луч 3. Направления движения лучей указаны стрелками. Фигуры, обозначенные буквами а, б, в, и г, соответствуют положениям лучей в четыре момента времени, сдвинутых относительно друг друга на 1/4 длительности прохода каждым из лучей зоны управления.
Для всех двоек (фиг. 2) вертикального луча длительность интервала времени между первым и вторым импульсом равна t1, для двоек горизонтального луча t2, при этом t1 и t2 не равны между собой. Информация о положении луча содержится в длительности интервалов времени tи между двойками: опорному положению луча соответствует длительность tио, крайним положениям длительности tиmin и tиmax, промежуточным положениям tиi.
Как показано на фиг. 3, принятый сигнал является пачкой импульсов. Пачка имеет колоколообразную огибающую, что определяется результатом движения луча по входному зрачку бортового фотоприемника. Для определения координат X и Y управляемого аппарата достаточно определить длительности промежутков между двойками, расположенными наиболее близко к центрам пачек импульсов, выработанных бортовым фотоприемником при проходе по нему вертикального и горизонтального лучей.
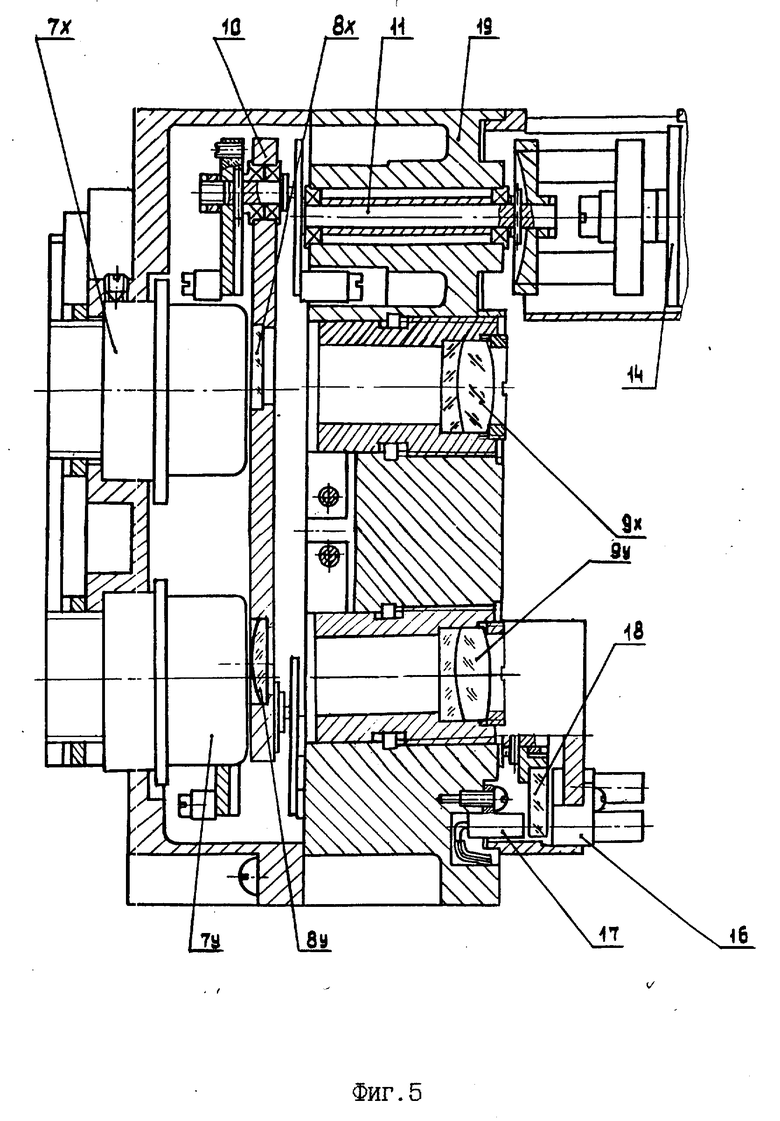
Наряду со способом заявляется устройство, реализующее предложенный способ и объединенное с ним единым замыслом. Его сущность поясняется чертежами, где на фиг. 4 показана структура схемы устройства, на фиг. 5 оптико-механическая часть прожектора.
Устройство (фиг. 4) содержит установленные соосно прожектор 4 и визир 5. Прожектор содержит две аналогичные ветви, каждая из которых служит для определения координаты по одной из координатных осей и содержит схему запуска 6, а также последовательно установленные инжекционный полупроводниковые лазер 7, отклоняющий оптический элемент (цилиндрическую линзу) 8 и объектив 9. Элементы 6-9 и 12 курсовой (т.е. служащей для формирования сигналов, определяющих координаты управляемого объекта по горизонтальной оси OX) ветви обозначены индексом x, элементы тангажной ветви индексом y Каждый из лазеров установлен вблизи фокальной плоскости системы, образуемой объективом 9 и отклоняющим оптическим элементом 8. Лазеры установлены так, что их p-n переходы (узкие полоски) перпендикулярны осям измеряемых координат. Отклоняющие оптические элементы выполнены в виде цилиндрических линз 8, закрепленных на общей рамке 10. Рамка установлена в корпусе на коленчатых валиках 11. Коленчатые валики установлены в шарикоподшипниках, что обеспечивает рамке возможность плоскопараллельного движения по окружности. Оси цилиндрических поверхностей линз 8 параллельны p-n переходам лазеров 7. P-n переход лазера 7y расположен горизонтально и поэтому показан на фиг. 4 точкой, p-n переход лазера 7x расположен вертикально и поэтому изображен в виде вертикальной черты. Входы схем запуска 6 соединены с блоками кодирования 12 сигналов курса и тангажа, входы которых подключены к выходам блока модуляции 13, входы которого соединены с приводом 14 рамки и программным устройством 15.
Все обозначения фиг. 5 соответствуют приведенным выше. Элементы: светодиод 16, фотодиод 17, оптический диск 18 (прерыватель) входят в состав привода 14 и обеспечивают ввод в блок модуляции 13 сигналов, определяющих положение рамки 10, а следовательно, и положение сканирующих лучей относительно опорного направления. Все элементы прожектора закреплены в корпусе 19.
Работает устройство следующим образом.
Оператор при помощи визира 5 ориентирует прожектор 4 в нужном направлении. После этого он воздействует на программное устройство 15, оператор приводит его в действие. Программное устройство 15 вырабатывает сигнал, поступающий на привод 14. Привод 14 через коленчатый вал приводит в движение рамку с закрепленными на ней цилиндрическими линзами 8. При этом штрихи, нанесенные на оптическом диске 18, пересекают поток лучей, идущий от светодиода 16 к фотодиоду 17. В результате фотодиодом 17 вырабатываются и поступают в блок модуляции 13 импульсы, определяющие положение рамки 10. По этим сигналам блок модуляции 13 вырабатывает текущие значения информативных интервалов времени. По сигналам блока модуляции 13 блоки кодирования 12 вырабатывают двойки, поступающие на входы схем запуска 6. Схемы запуска 6 усиливают по току поступающие на их входы импульсы до амплитуд, необходимых для запуска инжекционных лазеров 7. Цилиндрические линзы 8, перемещаясь, заставляют изображения тел лазеров сканировать поле зрения в соответствии со схемой, показанной на фиг. 1.
Попавшее во входной зрачок бортовой аппаратуры излучение прожектора преобразуется в сигналы, определяющие координаты X и Y управляемого аппарата. Сигналы X и Y подаются на рулевые органы управляемого объекта, в результате под их действием он приводится на ось визира.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 1997 |
|
RU2123166C1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРИЦЕЛА СИСТЕМЫ ТЕЛЕОРИЕНТИРОВАНИЯ С ИЗЛУЧАЮЩИМИ КАНАЛАМИ НА ИНЖЕКЦИОННЫХ ЛАЗЕРАХ | 1996 |
|
RU2115878C1 |
| Способ фокусировки оптики аппаратурных каналов с поэлементным формированием информационного поля | 2017 |
|
RU2660422C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |


Изобретение относится к области дистанционного управления машинами, и, в частности, летательными аппаратами и предназначено для формирования оптического поля для телеориентирования управляемых объектов. Изобретение решает техническую задачу, направленную на снижение массы габаритов и энергопотребления наземной аппаратуры; возможность передавать в луче наряду с информацией о координатах дополнительную информацию, возможность изменять в процессе управления крутизну пеленгационной характеристики и положение опорного направления. Согласно изобретению формирование оптического поля осуществляется заполнением зоны в окрестности оси оптическим потоком, причем заполнение производят путем ее сканирования плоскими (ножевидными) лучами, отклоняемыми со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира. 2 с.п. ф-лы. 5 ил.
| Цукерман С.Т., Гридин А.С | |||
| Управление машинами при помощи оптического луча | |||
| - Л.: Машиностроение, 1969, с | |||
| Механический грохот | 1922 |
|
SU41A1 |

